
Abstract
The present paper deals with the identification of the nine constitutive parameters appearing in the strain energy density of a linear elastic second gradient D4 orthotropic two-dimensional continuum model accounting for an external bulk double force \(m^{ext}\). The aim is to specialize the model for the description of pantographic fabrics, which show such a kind of anisotropy. Analytical solutions for model problems, which are here referred to as the heavy sheet, the non-conventional bending and the trapezoidal cases are recalled from a previous paper and further elaborated in order to perform gedanken experiments. We completely characterize the set of nine constitutive parameters in terms of the materials the fibers are made of (i.e. of the Young’s modulus of the fiber materials), of their cross section (i.e. of the area and of the moment of inertia of the fiber cross sections), of the internal rotational spring positioned at each intersection point between the two families of fibers and of the pitch, i.e. the distance between adjacent pivots. Finally, the remarkable form of the strain energy, derived in terms of the displacement field, is shortly discussed.
Access provided by CONRICYT-eBooks. Download chapter PDF
Similar content being viewed by others

Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
Generalized continuum theories represent nowadays one of the most promising research fields in continuum mechanics. Sound theoretical results are already provided in the literature (see [8, 18, 21, 35, 38, 41, 49] for general results in higher gradient theory, [1, 22, 40, 42, 44,45,46] for pantographic and fibrous materials and [7, 19, 20] for second gradient fluids) together with interesting results concerning the more general field of microstructured/micromorphic continua (see for instance [28, 29, 32, 34, 47, 48], and in particular [2,3,4,5] for application to carbon nanotube and [6, 23, 25, 26] for biological application; a general introduction for the particular case of micropolar continua is [33]). In this framework pantographic structures represent, in the opinion of the authors, an ideal starting point for the theoretical understanding of generalized continua. In fact, they represent the simplest possible 2D continuum in wich second gradient effects naturally arise from the geometry of the microstructure. Moreover, availability of technologies such as 3D printing and other computer-aided techniques, allows a ready experimental comparison that reveals very fruitful in boosting the modeling process for pantografic sheets and for microstructured continua in general. In order to have this strict interaction between theoretical and experimental research properly working, suitable numerical tools should be provided since, with the exception of some particular cases (such as the examples presented in this work), it is in general impossible to provide closed-form solutions. The numerical tools employed are often borrowed from well-established techniques based mainly on Finite Element Method [9,10,11,12, 24, 39, 43], but sometimes high-regularity elements ensuring suitably strong continuity conditions needed by higher gradient models are required (e.g. [13,14,15,16, 27]).
The work is organized as follows. In Sect. 2 we recall the derivation of governing PDEs, obtained in [50] for a homogeneous D4 anisotropic two-dimensional second gradient elastic material. In this case, explicit form of stress and hyper stress components have been derived in terms both of the strain (and of its gradient) and of the displacement field (i.e., of first, of second and of third derivatives of its components). Thus, the stress divergence and the hyper stress double divergence vectors have been derived, so that the final form of the PDEs, that were first exposed in [50], have been re-obtained. In Sect. 3, the analytical solutions of the heavy sheet, of the non-conventional bending and of the trapezoidal cases, that have been shown in [50], will be analyzed. In particular, the strain, the strain-gradient, the stress and the hyper stress components will be derived. Besides, contact force and double force, for each of the four sides of the rectangular body, will be given, as well as the contact vertex forces for each of its four vertexes. In Sect. 4 the pantographic case has been analyzed, generalizing the results of [37] to the case where in the pantographic sheet springs are present instead of perfect hinges. In particular, we will show how the analytical solutions of the heavy sheet, of the non-conventional bending and of the trapezoidal cases, that have been obtained in [37], can be achieved with the presence of these internal rotational springs by applying a system of external couples, able to annihilate the effects of the internal rotational springs. Such a system of external couples will be identified with out-of-diagonal components of the external bulk double forces. Finally, the identification between the pantograph with internal rotational springs (the micro-model) and the continuous homogeneous D4 anisotropic two-dimensional elastic second gradient rectangular body (the macro-model) will give an explicit identification of the nine constitutive parameters of the macro-model in terms of constitutive characteristics of the micro-model. In Sect. 5 a simple form of the internal energy, in terms of the displacement field and of its first and second gradient components, will be shown. This form includes not only the contributions of both families of fibers, for axial and for bending deformations of the micro-beams, but also of the internal rotational springs. In Sect. 6 some conclusions will be driven.
Finally, a linguistic remark: in this paper (as well as in [36]) we use the expression “gedanken experiment” in order to describe the type of reasoning that allows us to find the constitutive parameters we search for. Since this linguistic choice has been argued sometimes, we would like to point out the following. According to the Stanford Encyclopedia of Philosophy [51], a gedanken experiment is a thought experiment, i.e. a device of the imagination used to investigate the nature of things. Gedanken experiments are used for diverse reasons in a variety of areas. The experiments should be imagined and schematically described, regardless of any possibility of practical realization. As model cases one can consider the well known experiments on the concept of simultaneity in Special Relativity or the EPR experiment by Einstein, Podolsky and Rosen (see for instance [52]). Our line of reasoning, though of course simpler, is nonetheless exactly of this type, and therefore we stick to our previous choice.
2 Outline of the Model
In this Section we briefly recall the main facts about the linear elastic second gradient D4 orthotropic two-dimensional continuum model employed in this paper, which can be found in more detail in [50].
\(\mathscr {B}\) is a 2-dimensional body that is considered in the reference configuration, where X denotes the coordinates of its material points. \(U\left( G,\nabla G\right) \) is the internal energy density functional, that is a function of the deformation matrix \(G=\left( F^{T}F-I\right) /2\) and of its gradient \(\nabla G\). Here, \(F=\nabla \chi \), where \(\chi \) is the placement function, \(F^{T}\) is the transpose of F, and \(\nabla \) is the gradient operator. The energy functional \(\mathscr {E}\left( u\left( \cdot \right) \right) \) depends on the displacement \(u=\chi -X\) and includes two contributions: the internal and the external energies,
Here, n is the unit external normal and the dot the scalar product between vectors or tensors. \(b^{ext}\) and \(m^{ext}\) are (per unit area) the external body force and double force, respectively; \(t^{ext}\) and \(\tau ^{ext}\) are (per unit length) the external force and double force; \(f^{ext}\) is the external concentrated force, that is applied on the vertices \(\left[ \partial \partial \mathscr {B}\right] \). The boundary \(\partial \mathscr {B}\) is assumed to be the union of m regular parts \(\Sigma _{c}\) (with \(c=1,\ldots ,m\)) and the so-called boundary of the boundary \(\left[ \partial \partial \mathscr {B}\right] \) is assumed to be the union of the corresponding m vertex-points \(\mathscr {V}_{c}\) (with \(c=1,\ldots ,m\)) with coordinates \(X^{c}\).
It is worth noting that the new contribution of [50] with respect to [36] is in the tensor \(m^{ext}\). This term will be crucial for the identification that we are going to perform.
It is well-established that in the general second gradient linear case we have
where the indices I and J go from 1 to 3 and the indices \(\alpha \) and \(\beta \) go from 1 to 6. In [50], Eqs. (14), (16), (17), (19), \(\varepsilon \), \(\eta \), C and A are reported component-wise, respectively.
In [50], the computation of the minimum of \(\mathscr {E}\) is performed and (see Eq. (21) therein) the system of PDEs for anisotropic \(D_{4}\) elastic second gradient materials has been deduced in terms of the displacement field.
We now shall show some explicit computations which are instrumental for the identification procedure. Referring to the notation introduced in [50], Eqs. (5)–(8), the stress components read:
The hyperstress components read:
It is worth to be noted that, by replacing the components of the strain and of the strain gradient tensors
into (3)–(11), we obtain, respectively, the stress and the hyperstress components in terms of the displacement fields,
so that the first component of stress divergence in terms of the displacement field is
Besides, keeping in mind that
the first component of the double divergence of the hyper-stress in terms of the displacement field is
For the sake of brevity, from now on, whenever we will refer to an equation (n) in [50] we shall use the notation (n-P1). With this new notation it is now evident that (21-P1) is given by insertion of (24), and (25) into the integral argument of (3-P1).
3 Analytical Solutions
In this Section we shall elaborate on the top of analytical solutions proposed in [50] and give more details about the choice of compatible combinations of the external distributed bulk actions \(b^{ext}\) and \(m^{ext}\).
Since in [50] the case of a body of rectangular geometry is considered, in order to elaborate some of the analytical solutions proposed therein to perform identification through gedanken experiments, we shall do the same. In Fig. 1 the scheme of the rectangle considered in [50] is represented.

Nomenclature of the 2-dimensional body \(\mathscr {B}\)
3.1 Heavy Sheet
The following displacement field is considered,
At the bottom the vertical displacement is
We have by derivation of (26)
The strain components are by definition
so that the strain gradient components are
Thus, from (15)–(17), the stress components are
and, from (18)–(23), the hyperstress components are
From (4-P1), at the boundary sides with unit normal n we have the relations between, per unit length, the contact force t and double force \(\tau \) and the external force \(t^{ext}\) and double force \(\tau ^{ext}\),
Insertion of (24-P1)-(27-P1) into (39) and use of (30)–(38) gives for sides S, Q, R and T, respectively,
At the vertices, from (42-P1) and (27), we have that the relevant combination of the hyperstress for characterization of vertex-forces are
so that, from (41-P1),
3.2 Non-conventional Bending
Let us take into account the following displacement field,
The maximum displacement (at side S) is
We have by derivation of (59)
The strain components are by definition
so that the strain gradient components are
Thus, from (15)–(17), the stress components are
and, from (18)–(23), the hyperstress components are
From (4-P1), at the boundary sides with unit normal n we have the relations between, per unit length, the contact force t and double force \(\tau \) and the external force \(t^{ext}\) and double force \(\tau ^{ext}\),
Insertion of (24-P1)-(27-P1) into (72) and use of (63)–(71) gives for sides S, Q, R and T, respectively,
From (42-P1) and (60), at the vertices we have that the relevant combinations of hyperstress for characterization of vertex-forces are
so that, from (41-P1),
It is worth to be noted that the total external moment \(M_{S}^{ext}\) on side S is only due to the double force \(\tau _{2}^{ext,S}\) of (76)
that provides an interpretation of the parameter a first introduced in (59), i.e.,
3.3 Trapezoidal Case
Let us take into account the following displacement field
We have by derivation of (94)
The strain components are by definition
so that the strain gradient components are
Thus, from (15)–(17), the stress components are
and, from (18)–(23), the hyperstress components are
Insertion of (24-P1)-(27-P1) into (39) and use of (63)–(71) gives for sides S, Q, R and T, respectively,
From (42-P1) and (60), at the vertices we have that the relevant combination of the hyperstresses for characterization of vertex-forces are
so that, from (41-P1),
4 Pantographic Case
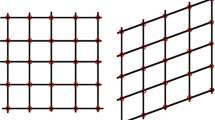
Let us assume that the two families of fibers in the pantographic structure, modelled as Euler beams in the micro-model, are aligned with the axes of the frame of reference. A series of intuitive considerations are done in this section. In other words a set of gedanken experiments is conceived for the purpose of parameters identification.
4.1 Heavy Sheet
We can prove that the vertical displacement of side T is, in the micro-model, that of the free-side of a cantilever extensional beam of length 2l, with axial rigidity \(E_{m}A_{m}\) and with a distributed axial load \(b_{N}=b_{N}^{v}+b_{N}^{h}\) that is due to its own weight \(b_{N}^{v}=-\rho _{m}A_{m}g\) and to the weight of the horizontal beams \(b_{N}^{h}=b_{N}^{v}\)
where g is gravity acceleration, \(\rho _{m}\) is the mass per unit volume of the micro beams and \(E_{m}\) is their Young modulus. Besides, equating the mass of the continuous macro model (\(\rho L2l\)) with the one of the micro model (\(\rho _{m}A_{m}L\frac{2l}{d_{m}}+\rho _{m}A_{m}2l\frac{L}{d_{m}}=2Ll\frac{2\rho _{m}A_{m}}{d_{m}}\)) yields the relation
where \(A_{m}\) is the cross section area of each micro beam and \(d_{m}\) is the distance between two adjacent families of micro beams. From (126) and (127) we have
Further considerations based upon the heavy sheet configuration can be done. First of all, the natural absence of the Poisson effect in this configuration makes the horizontal force per unit length for the vertical sides, that are given from (40). This and (128) give
The natural absence of double force in vertical sides gives from (43) and (128)
The natural absence of double force in horizontal sides gives from (51) and (128)
Moreover, in the same heavy sheet configuration, the natural absence of vertex forces gives from (56) and (128)
that yields with (130),
4.2 Non-conventional Bending
We set an equivalence of such a case with a pantograph composed of a number (i.e. \(\frac{2l}{d_{m}}\)) of horizontal beam that are bent due to an external couple \(M_{m}\) on the right-hand side of each beam, so that the total external moment \(M_{S}^{ext}\) on side S is related to \(M_{m}\),
and the vertical displacement of side S is
where \(I_{m}\) is the moment of inertia of the micro-beams. Such an equivalence works nicely in the case of absence of internal rotational springs at the place of each internal hinges.
In the case where the internal rotational springs are present, we need to apply, in the micro-model, two moments at the position of each internal rotational springs. One moment \(M_{ext}^{H}\) on the horizontal fibers and the other moment \(M_{ext}^{V}\) on the vertical fibers. Such moments have the role to annihilate the effects of the moments, \(M_{rs}^{H\rightarrow V}\) and \(M_{rs}^{V\rightarrow H}\), that are due to the internal rotational springs and, therefore, are proportional to the relative angle \(\left( \theta _{H}-\theta _{V}\right) \) between the horizontal (\(\theta _{H}\) is the rotation of the horizontal beam) and the vertical \(\theta _{V}\) (\(\theta _{V}\) is the rotation of the vertical beam) beams. Let us take into account the horizontal beam. The internal rotational springs gives positive moment \(M_{rs}^{V\rightarrow H}\) on the beam
because in this non-conventional bending case we have
that gives
The same internal rotational spring gives an opposite moment \(M_{rs}^{H\rightarrow V}\) on the vertical beam,
In order to annihilate the effects of the internal rotational springs, the external moments \(M_{ext}^{H}\) and \(M_{ext}^{V}\) need to be the opposite of those given by the rotational springs, i.e.,
Thus, two moments have been applied at the position of each internal hinge-rotational-spring in the micro-model. In the macro-model, such positions are distributed on the two-dimensional body. Therefore, we need to apply distributed external moments that are modelled by a distributed external double force \(m^{ext}\). In particular only the out-of-diagonal components \(m_{12}^{ext}\) and \(m_{21}^{ext}\) have the role of distributed external couples. Since \(m_{12}^{ext}\) does work on the component \(u_{1,2}\) of the displacement gradient, then \(m_{12}^{ext}\) is interpreted as the negative distributed couple on the vertical beams
Because of (57-P1)
Equations (93), (134) and (135) give
Moreover, in the non-conventional bending case, from (89), the natural absence of vertex forces gives,
4.3 Trapezoidal Case
From (124), assuming zero wedge forces, in the trapezoidal case we have
4.4 Summary
Equations (128)–(132), (136)–(139) completely characterize the orthotropic material. In particular the two constitutive matrices are represented as follows
4.5 About the Redundancy of Equations Coming from gedanken experiments
The same result in (136) could be achieved by identifying the component \(m_{21}^{ext}\) that does work on the component \(u_{2,1}\)of the displacement gradient. Thus, \(m_{21}^{ext}\) is interpreted as the positive distributed couple on the horizontal beams
that, with (57-P1), gives the same identification (136).
We remark that the identification in (129) could also be achieved, in the trapezoidal case, assuming zero horizontal force on the vertical sides and that the one in (130) could also be achieved in the non-conventional bending case, from (84), assuming zero double force at horizontal sides.
We remark that the identification in (133) could also be achieved in the trapezoidal case, from (113) and with (132), assuming zero horizontal double force at vertical sides.
We remark that the identification in (136) could also be achieved in the non-conventional bending case, from (77)\(_{1}\) or from (73)\(_{1}\), assuming zero horizontal force per unit length at vertical sides or, from (81), by assuming zero horizontal force per unit length at horizontal sides. Alternatively it could be achieved in the trapezoidal case, from (78)\(_{2}\) and (74)\(_{2}\), by assuming zero vertical force per unit length at vertical sides or, from (81), by assuming zero horizontal force per unit length at horizontal sides.
We finally remark that the identification in (138) could also be achieved in the trapezoidal case, from (117), assuming zero horizontal double force at horizontal sides.
Further redundant identification formulas could be derived in the trapezoidal case that, for the sake of simplicity, are not made explicit in this paper.
5 Some Remarks on the Internal Energy
It is interesting to recognize that the internal energy (2) can now be computed with (14-P1), (15-P1) and with the definition, in the linear case, of the deformation matrix G and of its gradient \(\nabla G\),
or, in terms of the displacement field,
Expression (142) is a useful form of the energy, as in it the contributions of both families of fibers, for axial and for bending deformations of the micro-beams, and also of the internal rotational springs, appear explicitly.
6 Conclusion
In the same fashion of [37], in this paper we have identified the whole set of nine parameters characterizing a homogeneous linear second gradient D4 orthotropic continuum model accounting for external distributed bulk double forces, developed in [50] and which can be considered an extension of the model presented in [36]. Analytical solutions proposed in [50] were employed in order to perform an identification in terms of the Young’s modulus of the fibers’ material, of their area, of the moment of inertia of their cross sections, of the rigidity of the internal rotational spring and of the step. A suitable form of the strain energy, that closely resembles the contributions of both families of fibers, for axial and for bending deformations of the micro-beams, and also of the internal rotational springs, has been derived.
The results can of course be generalized in various ways. For instance, interesting progresses in this line of investigation may involve multi-physics coupling between mechanical and electric effects (a case in which anisotropy plays of course a relevant role [53]), as well as more general beam models for the fibers [54,55,56]. The extension of the results to nonlinear second gradient continua is of course far from trivial and may require substantial theoretical progresses.
References
Alibert, J.-J., Seppecher, P., Dell’Isola, F.: Truss modular beams with deformation energy depending on higher displacement gradients. Math. Mech. Solids 8(1), 51–73 (2003)
Aminpour, H., Rizzi, N.: A one-dimensional continuum with microstructure for single-wall carbon nanotubes bifurcation analysis. Math. Mech. Solids 21(2), 168–181 (2016)
Aminpour, H., Rizzi, N.: On the continuum modelling of carbon nano tubes. Civil-Comp Proceedings, vol. 08 (2015)
Aminpour, H., Rizzi, N.: On the modelling of carbon nano tubes as generalized continua. Adv. Struct. Mater. 42(1), 15–35 (2016)
Aminpour, H., Rizzi, N., Salerno, G.: A one-dimensional beam model for single-wall carbon nano tube column buckling. In: Civil-Comp Proceedings, vol. 106 (2014)
Giorgio, I., Andreaus, U., Scerrato, D., dell’Isola, F.: A visco-poroelastic model of functional adaptation in bones reconstructed with bio-resorbable materials. Biomech. Model. Mechanobiol. 15(5), 1325–1343 (2016)
Auffray, N., dell’Isola, F., Eremeyev, V.A., Madeo, A., Rosi, G.: Analytical continuum mechanics à la Hamilton-Piola least action principle for second gradient continua and capillary fluids. Math. Mech. Solids 20(4), 375–417 (2015)
Auffray, N., Dirrenberger, J., Rosi, G.: A complete description of bi-dimensional anisotropic strain-gradient elasticity. Int. J. Solids. Struct. 69–70, 195–206 (2015). doi:10.1016/j.ijsolstr.2015.04.036
Baraldi, D., Reccia, E., Cazzani, A., Cecchi, A.: Comparative analysis of numerical discrete and finite element models: the case of in-plane loaded periodic brickwork. Comp. Mech. Comput. Appl. 4(4), 319–344 (2013)
Bilotta, A., Formica, G., Turco, E.: Performance of a high-continuity finite element in three-dimensional elasticity. Int. J. Numer. Methods Biomed. Eng. 26(9), 1155–1175 (2010)
Bilotta, A., Turco, E.: A numerical study on the solution of the Cauchy problem in elasticity. Int. J. Solids Struct. 46(25–26), 4451–4477 (2009)
Cazzani, A., Ruge, P.: Numerical aspects of coupling strongly frequency-dependent soil-foundation models with structural finite elements in the time-domain. Soil Dyn. Earthq. Eng. 37, 56–72 (2012)
Hughes, T.J., Cottrell, J.A., Bazilevs, Y.: Isogeometric analysis: CAD, finite elements, NURBS, exact geometry and mesh refinement. Comput. Methods Appl. Mech. Eng. 194(39), 4135–4195 (2005)
Cazzani, A., Malagù, M., & Turco, E.: Isogeometric analysis of plane-curved beams. Math. Mech. Solids (2014). doi:10.1177/1081286514531265
Greco, L., Cuomo, M.: B-Spline interpolation of Kirchhoff-Love space rods. Comput. Methods Appl. Mech. Eng. 256, 251–269 (2013)
Cuomo, M., Contrafatto, L., Greco, L.: A variational model based on isogeometric interpolation for the analysis of cracked bodies. Int. J. Eng. Sci. 80, 173–188 (2014)
Del Vescovo, D., Giorgio, I.: Dynamic problems for metamaterials: review of existing models and ideas for further research. Int. J. Eng. Sci. 80, 153–172 (2014)
Dell’Isola, F., Andreaus, U. and Placidi, L.: At the origins and in the vanguard of peri-dynamics, non-local and higher gradient continuum mechanics. An underestimated and still topical contribution of Gabrio Piola, Mechanics and Mathematics of Solids (MMS), vol. 20, p. 887–928 (2015)
Dell’Isola, F., Gouin, H., Seppecher, P.: Radius and surface tension of microscopic bubbles by second gradient theory. Comptes Rendus de l’Academie de Sciences - Serie IIb: Mecanique, Physique, Chimie, Astronomie 320(6), 211–216 (1995)
Dell’Isola, F.G., Rotoli, G.: Validity of Laplace formula and dependence of surface tension on curvature in second gradient fluids. Mech. Res. Commun. 22(5), 485–490 (1995)
Dell’Isola, F., Seppecher, P.: The relationship between edge contact forces, double forces and interstitial working allowed by the principle of virtual power. Comptes Rendus de l’Academie de Sciences, Serie IIb: Mecanique, Physique, Chimie, Astronomie 321, 303–308 (1995)
Dell’Isola, F., Steigmann, D.: A two-dimensional gradient-elasticity theory for woven fabrics. J. Elast. 118(1), 113–125 (2015)
Dos Reis, F., Ganghoffer, J.F.: Construction of micropolar continua from the asymptotic homogenization of beam lattices. Comput. Struct. 112–113, 354–363 (2012)
Garusi, E., Tralli, A., Cazzani, A.: An unsymmetric stress formulation for reissner-mindlin plates: a simple and locking-free rectangular element. Int. J. Comput. Eng. Sci. 5(3), 589–618 (2004)
Goda, I., Assidi, M., Belouettar, S., Ganghoffer, J.F.: A micropolar anisotropic constitutive model of cancellous bone from discrete homogenization. J. Mech. Behav. Biomed. Mater. 16(1), 87–108 (2012)
Goda, I., Assidi, M., Ganghoffer, J.F.: A 3D elastic micropolar model of vertebral trabecular bone from lattice homogenization of the bone microstructure. Biomech. Model. Mechanobiol. 13(1), 53–83 (2014)
Greco, L., Cuomo, M.: An implicit G1 multi patch B-spline interpolation for Kirchhoff-Love space rod. Comput. Methods Appl. Mech. Eng. 269, 173–197 (2014)
Mindlin, R.D.: Micro-structure in Linear Elasticity, Department of Civil Engineering, vol. 27. Columbia University New York, New York (1964)
Misra, A., Huang, S.: Micromechanical stress-displacement model for rough interfaces: effect of asperity contact orientation on closure and shear behavior. Int. J. Solids Struct. 49(1), 111–120 (2012)
Misra, A., Parthasarathy, R., Singh, V., Spencer, P.: Micro-poromechanics model of fluid-saturated chemically active fibrous media. ZAMM Zeitschrift fur Angewandte Mathematik und Mechanik 95(2), 215–234 (2015)
Misra, A., Poorsolhjouy, P.: Micro-macro scale instability in 2D regular granular assemblies. Contin. Mech. Thermodyn. 27(1–2), 63–82 (2013)
Altenbach, J., Altenbach, H., Eremeyev, V.A.: On generalized Cosserat-type theories of plates and shells: a short review and bibliography. Arch. Appl. Mech. 80(1), 73–92 (2010)
Eremeyev, V.A., Lebedev, L.P., Altenbach, H.: Foundations of Micropolar Mechanics. Springer Science & Business Media (2012)
Misra, A., Singh, V.: Nonlinear granular micromechanics model for multi-axial rate-dependent behavior, 2014. Int. J. Solids Struct. 51(13), 2272–2282 (2014)
Pideri, Catherine, Seppecher, P.: A second gradient material resulting from the homogenization of an heterogeneous linear elastic medium. Contin. Mech. Thermodyn. 9(5), 241–257 (1997)
Placidi, L., Andreaus, U., Della Corte, A., Lekszycki, T.: Gedanken experiments for the determination of two-dimensional linear second gradient elasticity coefficients. Zeitschrift für angewandte Mathematik und Physik 66, 3699–3725 (2015)
Placidi L., Andreaus U., Giorgio I.: Identification of two-dimensional pantographic structure via a linear D4 orthotropic second gradient elastic model. J. Eng. Math. ISSN: 0022-0833 (2017) doi:10.1007/s10665-016-9856-8
Sansour, C., Skatulla, S.: A strain gradient generalized continuum approach for modelling elastic scale effects. Comput. Methods Appl. Mech. Eng. 198(15), 1401–1412 (2009)
Scerrato, D., Giorgio, I., Rizzi, N.L.: Three-dimensional instabilities of pantographic sheets with parabolic lattices: numerical investigations. Zeitschrift fur Angewandte Mathematik und Physik, vol. 67(3), Article number 53 (2016)
Scerrato, D., Zhurba Eremeeva, I.A., Lekszycki, T., Rizzi, N.L.: On the effect of shear stiffness on the plane deformation of linear second gradient pantographic sheets. ZAMM Zeitschrift fur Angewandte Mathematik und Mechanik, vol. 96, pp. 1268–1279 (2016). doi:10.1002/zamm.201600066
Selvadurai, A.P.S.: Plane strain problems in second-order elasticity theory. Int. J. Non-Linear Mech. 8(6), 551–563 (1973)
Seppecher, P., Alibert, J.-J., Dell’Isola, F.: Linear elastic trusses leading to continua with exotic mechanical interactions, J. Phys. Conf. Ser. vol. 319(1), 13 p (2011)
Presta, F., Hendy, C.R., Turco, E.: Numerical validation of simplified theories for design rules of transversely stiffened plate girders. Struct. Eng. 86(21), 37–46 (2008)
Rahali, Y., Giorgio, I., Ganghoffer, J.F., dell’Isola, F.: Homogenization á la Piola produces second gradient continuum models for linear pantographic lattices. Int. J. Eng. Sci. 97, 148–172 (2015)
Steigmann, D.J.: Linear theory for the bending and extension of a thin, residually stressed, fiber-reinforced lamina. Int. J. Eng. Sci. 47(11–12), 1367–1378 (2009)
Steigmann, D.J., dell’Isola, F.: Mechanical response of fabric sheets to three-dimensional bending, twisting, and stretching. Acta Mechanica Sinica/Lixue Xuebao 31(3), 373–382 (2015)
Yang, Y., Ching, W.Y., Misra, A.: Higher-order continuum theory applied to fracture simulation of nanoscale intergranular glassy film. J. Nanomech. Micromech. 1(2), 60–71 (2011)
Yang, Y., Misra, A.: Micromechanics based second gradient continuum theory for shear band modeling in cohesive granular materials following damage elasticity. Int. J. Solids Struct. 49(18), 2500–2514 (2012)
Auffray, N., Bouchet, R., Brechet, Y.: Derivation of anisotropic matrix for bi-dimensional strain-gradient elasticity behavior. Int. J. Solids Struct. 46(2), 440–454 (2009)
Placidi, L., Barchiesi, E., Battista, A., An inverse method to get further analytical solutions for a class of metamaterials aimed to validate numerical integrations, Proceedings of the ETAMM2016 conference EMERGING TRENDS IN APPLIED MATHEMATICS AND MECHANICS, May 30 - June 3, 2016, Perpignan, France
Nodelman, U., Allen, C., Perry, J.: Stanford encyclopedia of philosophy (2003)
Cohen, M.: Simultaneity and Einstein’s Gedankenexperiment. Philosophy 64(249), 391–396 (1989)
Abo-el-nour, N., Hamdan, A.M., Almarashi, A.A., and Battista, A.: The mathematical modeling for bulk acoustic wave propagation velocities in transversely isotropic piezoelectric materials. Mathematics and Mechanics of Solids (2015). doi:10.1177/1081286515613333
Silvestre, N., Camotim, D.: Second-order generalised beam theory for arbitrary orthotropic materials. Thin-Walled Struct. 40(9), 791–820 (2002)
Piccardo, G., Ranzi, G., Luongo, A.: A complete dynamic approach to the generalized beam theory cross-section analysis including extension and shear modes. Math. Mech. Solids 19(8), 900–924 (2014)
Piccardo, G., Ranzi, G., Luongo, A.: A direct approach for the evaluation of the conventional modes within the GBT formulation. Thin-Walled Struct. 74, 133–145 (2014)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer Nature Singapore Pte Ltd.
About this chapter
Cite this chapter
Placidi, L., Barchiesi, E., Della Corte, A. (2017). Identification of Two-Dimensional Pantographic Structures with a Linear D4 Orthotropic Second Gradient Elastic Model Accounting for External Bulk Double Forces. In: dell'Isola, F., Sofonea, M., Steigmann, D. (eds) Mathematical Modelling in Solid Mechanics. Advanced Structured Materials, vol 69. Springer, Singapore. https://doi.org/10.1007/978-981-10-3764-1_14
Download citation
DOI: https://doi.org/10.1007/978-981-10-3764-1_14
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-10-3763-4
Online ISBN: 978-981-10-3764-1
eBook Packages: EngineeringEngineering (R0)