
Abstract
Rehabilitation and assistive robotics is an emerging field of research where researchers are trying to develop tailored made robotic devices to address the challenge of disability. This paper presents a study on feedback controlled wearable robotic hand for grasping. The proposed design is compact and sufficiently light to be used as an assistive hand. It is tendon driven and joint-less structure that has the potential to be used as an assistive device for stroke patients. The concept has been implemented for index and thumb fingers as a first prototype to enable grasping. Shape memory alloy (SMA) actuator and bias force mechanism are used for the purpose of hand’s flexion and extension. This paper describes the mechatronic design of the wearable hand, simulation, modeling, and development of the actuation unit and sensory system. Experiments of open loop controller were conducted to understand the hand characterization and grip force provided by index finger. A feedback controller (proportional controller) was implemented for this prototype with gripping force as the feedback parameter. It was observed that approximately 2.25 A current caused 4 cm displacement for SMA actuator. The maximum temperature of the SMA actuator was achieved to be 100 °C. The attainable gripping force was around 2 N for a load free finger. The conducted experiments showed promising results that encourages further development on this.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
It is estimated in Malaysia that each hour, there are six people hit by stroke; the third prime reason of death and the main cause of disability [1]. Stroke is among the top causes of death in other ASEAN countries also, with death rate reaches up to 54.2 in Singapore per each 100 000 persons. In the world, fifteen million people suffer with a stroke each year; where five million of them die and the other five million spend their life disabled [2]. Hand conducts more than quarter of the human movements which are needed for daily life [3]. A person’s life will be in jeopardy if he or she cannot perform any action with hand due to disability. Hand’s movement is complicated and multifunctional. It also works as a sensory instrument to feel pressure, temperature etc. The fingertip consists of so many nerves that make it the richest source of tactile sensors [4].
In robotics, great progress has already been made to develop artificial hand mostly for industrial purpose. Many researchers are working in this field. Some examples of these hands are Utah/MIT hand [5], NTU hand [6], DLR Hand [7], NASA’s Robonaut Hand [8] and the Shadow Hand (commercially available) [9]. However, these types of artificial hands are totally different from artificial assistive hand for rehabilitation function. Shape memory alloy (SMA) based actuation could be a good option for designing such hands. However, there are other available technologies and people are also working on those to develop wearable robotic hand. Pneumatic based wearable robotic hand [10] has been developed.
SMA is basically Nickel (Ni) and Titanium (Ti) alloy based temperature dependent smart material. The transformation temperature depends on the concentration of Ni in the alloy and the temperature of the heat treatment needed to memorize the desired shape [11].
2 Design and Static Analysis of Assistive Robotic Hand
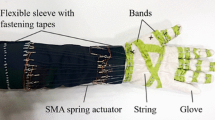
This design uses the structure of human hand as a rigid frame to perform a grasp. Index and thumb fingers are used in this study for purpose of grasping. A Prototype was developed using gloves and wires as shown in Fig. 1. This idea was first proposed by SNU Exo-Glove [4].

The structure of glove
The developed system used two wires as tendons, six straight tubes and two U-shaped tubes were used as guide ways for tendons as explained in Fig. 1. A latex glove was used as a base for the attachment of the actuation wire and as protection for hand from any harm. Two U-shaped tubes were placed on the index and thumb tips and two straight tubes are attached to each finger in parallel to make a path for the wire. Other three tubes were attached in the palm of hand as shown in Fig. 1. Exerted forces by tendons were originally generated from a force mechanism, which was attached to human arm. SMA’s spring and normal linear spring were used for purpose of hand extension and flexion (Fig. 2).

The developed assistive hand
3 Grip Force Modeling and Simulation
Due to the complexity and diversity of the human finger, a simple model inspired by Morales [12] has been proposed which describes the tendon-pulley system in the index finger as shown in Fig. 3. In this model the index finger is assumed to be as two links joined at one point as described in Fig. 3a. where:

A simple model (a) complete model (b) simplification of the relation between linear spring displacement and rotational displacement of the index finger
At static equilibrium total moment about joint flexion should be zero and the external load assumed to be zero.
where:
- T:
-
tension force
- X:
-
SMA stroke (translational displacement)
- Ф:
-
angular displacement
- \(\Theta\) :
-
angle of the applied tension
- L:
-
index finger length
- S:
-
distance between flexion joint and point of applied tension force (radius)
- me:
-
mass of external load attached to the index finger
- m:
-
mass of the finger
- k:
-
spring constant of the biased spring
- Fgrip:
-
grip force
From the basic equation of spring tension T can be expressed as follows;
T = k ∙ X
As shown in Fig. 3b, the SMA actuated tendon contraction that would enable index finger’s rotation through an angle Ф. An identical contraction length can be approximated [13] by:
Equation 1 can be re written as follows to establish a relationship grip force and displacement of the finger.
Therefore, from the above relationship it can be concluded that Fgrip = f (k, X, me, S). The simulation was done in order to investigate the effects of the system variables such as k, X, me and S on the system. Figure 4a shows that as SMA contracts, grip force increases and vice versa. Also it (Fig. 4a) indicates that higher spring constant causes larger exerted grip force. Figure 4b shows the effect of S on the grip force. It is observed that if S is increased grip force increases at same displacement. Similarly it can be understood from Fig. 4c that external load lowers down the grip force. Spring constant plays the most significant part among these three factors in influencing the grip force. It is clear from the above derivation of the grip force model that applied tension is the function of displacement X, therefore, it is necessary to have certain amount of displacement to generate realistic grip force and this varies with value of external load (Fig. 4c).

Simulation results, a effect of spring constant, b effect of distance s, c effect of external load on the finger
4 Experimental Setup
An experimental setup was prepared as shown in Fig. 2. Three SMA’s springs were connected in series and used as actuator for hand’s flexion, and one linear spring was used as bias mechanism for extension. Grip force on the index’s fingertip, current passing through the SMAs and its changes in length were recorded using proper sensory system. Actuation force mechanism is controlled by the electrical heating of the SMA’s springs. Further a Thermal Imager FLUKE Ti20 was used to read the temperature of the SMA actuator under thermal excitation.
Two major types of experiments were conducted in order to characterize the developed prototype of the assistive hand. In the first set of experiments open loop tests were carried out with different number of SMA actuator and external load. In the second category of experiment force feedback was applied to control the actuation of the SMA coils. An Electromyography (EMG) based Human Computer Interface (HCI) system was also developed to turn on and off the feedback controlled assistive hand for grasping and releasing targetting people with partial disability. The flow chart shown in Fig. 5 explains the integration of EMG based HCI with the assistive hand. Raw EMG signal was acquired from the working hand using the developed biosignal amplifier at 1 kHz sampling rate. Then RMS value was calculated for each 1000 data to produce threshold criteria for grasping and releasing of the disabled hand using the mechanism. If RMS value reaches the threshold level (11 mV) the system status will be changed otherwise system will continue with current state.

Flow chart EMG integrated assistive hand operation
5 Results and Discussions
5.1 Grip Force Analysis
Experiment was conducted to investigate the applied grip forces on an object using 3 SMA’s springs with open loop configuration, to determine whether it is sufficiently enough or more of SMA’s springs are needed. Cylindrical object with 3 cm radius which was assumed to be rigid was used to carry out the experiment. It was also assumed that the object is attached to another body and user is not lifting the object (i.e. holding a hand rail on a bus). A force sensor was attached to the index finger to measure the grip force applied by index’s fingertip under free (me = 0) and external loads (me = 50 g). Figure 6 demonstrates that the range of grip force reached to maximum of 1.6 N at free load but reduced to only around 0.4 N when 50 grams mass is attached to the index finger which is in line with the simulation result as explained in Fig. 4. No measurable grip force was achieved when a mass of 100 g (me) was attached to the index finger with this current design. However, the results indicate that 3 SMA springs are sufficiently strong enough to perform an object’s grasping.

Achieved grip force using the developed assistive hand, a without any external load attached to the hand, b 50 g external load attached to the hand
5.2 Experiments with Force Feedback
Open loop tests confirms that approximate current necessary for the developed assistive hand actuation is ~2 A that will generate a grip force in a range of 1.5 N to 2 N. The developed feedback system is described in Fig. 7. In order to have a safe operation without damaging SMA actuator maximum allowable current was limited to 2 A.

Developed force feedback system for the assistive robotic hand
Two tests were carried out for the assistive hand using force feedback mechanism one is without any external load (i.e. me = 0) and another one with an external load of 50 g (i.e. me = 50 g). The controller is turned on by EMG at the beginning and turned off by EMG at the end (as explained in the flow chart of Fig. 5). Figure 8a, b shows the behavior of the grip force and supplied voltage for both the experiments. Initially the hand was not actuated therefore maximum voltage was applied to achieve the grip action; as the force sensor value reached to set point value of 2 N voltage went down to zero in the case of no external load Fig. 8a. After around 15 s grip force starts to decrease due to the cooling of the SMA actuator that cause increase in voltage up to a level of 5 V and then grip force starts to increase causing lowering down of applied voltage. The system behaves repeatedly like this until it was turned off by EMG signal input. The effect of an external load was investigated in the second test. A 50 g mass was attached to the index finger as shown in Fig. 3 in this experiment. As expected the grip force is reduced to around 0.7 N (Fig. 8b) as compared to the case without any external load. However, the pattern of applied voltage and the grip force was same. It seems like grip force is higher for closed loop configuration (for both me = 0 and me = 50 g) than open loop configuration which may result from inconsistent fixing of the sensor with the index finger. Figure 9 shows relationship between the supply voltage (V) and resultant current thru SMA actuators (I) for both the experiments which indicates electrical load of SMA actuator is not completely linear and maximum limit of the current is 2 A. In comparison between open loop and close loop system, the second yields better result in terms of automating the device with EMG integrated human computer interface (HCI).

Grip force and applied voltage relationship with a P controller implemented, a without any external load me = 0, b with an external load of 50 g; me = 50 g

Voltage and current relationship for SMA actuators under operation, a without any external load me = 0, b with an external load of 50 g; me = 50 g
6 Conclusion
The aim of this work was to design an assistive robotic hand based on shape memory alloy (SMA) actuator. Electromyography (EMG) signal was used with force feedback mechanism to operate the hand targeting semi-paralyzed people to be able to grasp some rigid object (i.e. handrail of a public bus). The advantages of this design are human-like appearance, simple and direct controllability, low weight and noiselessness. The structure of human hand is considered here as a rigid frame to perform grasping where a wearable actuated glove will enable disabled hand to perform grasp. This work used the index and thumb fingers to be controlled here for purpose of grasping. Tactile feedback was provided by the use of a simple resistive force sensor placed on the fingertip surface. Experimental tests carried out indicated that the actuation mechanism successfully permitted bi-directional motion of the two fingers. However further developments are required to improve the design compactness, and to enable the disabled patient to control all the disabled hand fingers for more comfort and realistic usage.
References
Kamarudin A (2014) ELIQUIS® (apixaban) approved. In: Malaysia for prevention of stroke and venous thromboembolism (VTE), Kuala Lumpur, pp 1–6
(2012) Management of Ischaemic Stroke. Ministry of Health Malaysia, Putrajaya
Brown A (2008) Why hands matter. Mech Eng 130(7)
Heo P, Gu GM, Lee S, Rhee K, Kim J (2012) Current hand exoskeleton technologies for rehabilitation and assistive engineering. Int J Precis Eng Manuf 13(5):807–824
Bundhoo V (2009) Design and evaluation of a shape memory alloy-based tendon-driven actuation system for biomimetic artificial fingers. Master thesis, University of Victoria
Lin L, Huang H (1996) Mechanism design of a new multifingered robot hand. In: The 1996 IEEE international conference on robotics and automation, pp 1471–1476
Butterfa J, Grebenstein M, Liu H, Hirzinger G (2001) DLR-hand II: next generation of a dextrous robot hand. In: The 2001 IEEE international conference on robotics and automation, pp 109–114
Alba D, Armada M, Ponticelli R (2005) An introductory revision to humanoid robot hands. In: Climbing and walking robots
Shadow Robot Company. (n.d.). http://www.shadowrobot.com/. Accessed 28 Oct 2014
Xing K, Huang J, Xu Q, Wang Y (2009) Design of a wearable rehabilitation robotic hand actuated by pneumatic artificial muscles. In: The 7th Asian control conference
Takami M, Fukui K, Saitou S, Sugiyama I, Terayama K (1992) Application of a shape memory alloy to hand splinting. Prosthet Orthot Int 16(1):57–63
Morales M (2011) Influence of tendon-pulley friction on an index finger model. Master thesis, Swiss Federal Institute of Technology
Chao EYS, An K, Cooney WP, Linscheid R (1989) Biomechanics of the hand. World Scientific Publishing Co., Pte. Ltd., Teaneck
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer Science+Business Media Singapore
About this paper
Cite this paper
Ba Hamid, A., Makhdoomi, M., Saleh, T. (2017). An Assistive Robotic Hand Based on Human Computer Interface (HCI) and Shape Memory Alloy (SMA) Actuator. In: Ibrahim, H., Iqbal, S., Teoh, S., Mustaffa, M. (eds) 9th International Conference on Robotic, Vision, Signal Processing and Power Applications. Lecture Notes in Electrical Engineering, vol 398. Springer, Singapore. https://doi.org/10.1007/978-981-10-1721-6_42
Download citation
DOI: https://doi.org/10.1007/978-981-10-1721-6_42
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-10-1719-3
Online ISBN: 978-981-10-1721-6
eBook Packages: EngineeringEngineering (R0)