
Abstract
Multi-channel communications protocols in Vehicular Ad Hoc Networks (VANETs) is a very important topic that has been attracting the research community in the last decade. These communication protocols are based on the latest standard draft IEEE 802.11p and IEEE 1609.4, in which the channel is divided into multiple channels (i.e., control channel (CCH) and service channels (SCHs)) in order to improve open public road safety services, comfort and efficiency of driving. There are several survey papers that present and compare the Multi-channel communication protocols from various perspectives, but a survey on Multi-channel coordination based MAC protocols in Vehicular Ad Hoc Networks (VANETs) is still missing. In this work, we provide a comparative study of the existing literature on multi-channel coordination based MAC protocols in vehicular Ad Hoc Networks. We first define suitable criteria to classify existing solutions, and then describe them by separately addressing a set of protocols in order to compare them. We conclude the paper by addressing some open issues that need to be tackled in future studies.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Vehicular ad hoc network (VANET) is an application of mobile ad hoc network, it has been considered to be an important part of the Intelligent Transportation System (ITS). More precisely, a VANET is a self-organized network that can be formed by connecting vehicle, in order to offer to drivers a variety of safety applications (e.g., traffic coordination) and non-safety applications (e.g., Internet access). Two main types of communication are potentially provided in VANET, Vehicle to Vehicle communication (V2V) and Vehicle to Infrastructure communication (V2I) [1].
A VANET is mainly characterized by high mobility, rapidly changing network topology and time critical. All of these characteristics cause many challenging issues in the design of vehicle to vehicle (V2V) and vehicle to infrastructure (V2I) communication protocols [1].
IEEE 802.11p is an approved amendment to the IEEE 802.11 MAC/PHY standard to support wireless access in vehicular environments, this standard allows vehicular communications in Dedicated Short Range Communications (DSRC) spectrum [2]. The US Federal Communication Commission (FCC) allocated 75 MHz of the DSRC spectrum at 5.9 GHz to be exclusively used for vehicle to vehicle and infrastructure to vehicle communications. At the PHY layer, IEEE 802.11p is essentially based on the Orthogonal Frequency Division Multiplexing technique (OFDM) defined for IEEE 802.11a, with a 10 MHz wide channel instead of the 20 MHz which is usually used by 802.11a devices. At the MAC layer, IEEE 802.11p is basically based on the Enhanced Distributed Channel Access (EDCA) of IEEE 802.11e. EDCA provides a differentiated channel access to data traffic with different priorities [2].

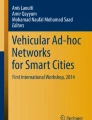
US DSRC spectrum allocation
In addition, the IEEE 1609 family of standards, is a higher layer standard on which IEEE 802.11p is based. This family of standards defines the architecture, communication model, management structure, security mechanisms and physical access for wireless communications in vehicular environment. Collectively, IEEE 802.11p and IEEE 1609.x are called Wireless Access in Vehicular Environments (WAVE) standards. In particular, the IEEE 802.11p and IEEE 1609.4 standards specify a multi-channel Medium Access Contro (MAC) protocol draft for the Wireless Access in Vehicular Environment (WAVE) system. Channels used by the IEEE 1609.4 standard are allocated in the DSRC spectrum. As indicated in Fig. 1, the overall bandwidth in 5.9 GHz spectrum is divided into seven smaller frequency operation channels of 10 MHz for each one. One of these channels is allocated as a control channel (CCH), which is used as a public channel for safety-relevant applications on the road. The rest of channels are used as service channels (SCHs) for non safety service applications dedicated to the comfort of the driver [3].
Nevertheless, as a contention-based mechanism, some requirements in the IEEE 1609.4 standard must be taken into consideration. For instance, safety related applications demand quick and reliable message delivery, while non-safety applications usually require high throughput and good fairness performance. However, the IEEE 1609.4 cannot meet the aforementioned requirements. Recently, several multi-channel coordination based MAC protocols have been proposed for VANETs, in order to achieve the above requirements.
The remainder of this paper is structured as follows. Section 2 introduces the IEEE 802.11p/1609.4 multi-channel operations. In Sect. 3, we summarize the operations of multi-channel coordination based MAC protocols in VANETs. Thereafter, we propose a qualitative comparison of these protocols, and point out some open issues that need to be tackled in future studies in Sect. 4. This paper is concluded in Sect. 5.
2 IEEE 802.11p/1609.4 Multi-channel Operations
The IEEE 802.11p MAC layer interacts with the IEEE 1609.4 to enable multi-channel operations of IEEE 802.11p-based radio interfaces. The WAVE system presents two types of channels, control channel (CCH) and service channel (SCH). As illustrated in Fig. 2, the available spectrum (in the frequency band of 5.85–5.925 GHz) is configured into one control channel (CCH) and six service channels (SCHs). The channel access time is divided into synchronization intervals (\(T_{Syn}\)) with a fixed length of 100 ms, which contain both CCH Interval (CCHI) and SCH Interval (SCHI), with 50 ms for each one. These synchronization intervals should follow an external time reference, which can be synchronized by the Coordinated Universal Time (UTC) that can be acquired from Global Positioning System (GPS) devices or from other vehicles [3].

Division of time into CCH intervals and SCH intervals in the IEEE 1609.4 standard
During CCH Interval, all devices must monitor the CCH for safety and private service advertisements. When SCH Interval arrives, devices can optionally switch to SCHs, which are used for non-safety applications. Each of these intervals begins with guard interval to minimize the effect of timing inaccuracies. Typical values for the guard interval are between 4 and 6 ms. During the Guard interval, transmissions are not allowed.
To exchange the non-safety applications, two types of WAVE devices are defined: Provider device (called WAVE provider) and user device (called WAVE user) [4]. In WAVE communication services, the WAVE device may take the role of either a provider or a user on a given WAVE Basic Service Set (WBSS), this is determined by the role chosen by the application operating on the device. A WAVE provider could be either a roadside unit or a vehicle. During the CCH Interval, WAVE providers broadcast WAVE Service Advertisement (WSA) packets, to indicate there availability for data exchange on one or more SCHs. For the reliable delivery, each WSA packet will be broadcasted at least twice. WSA contains the information about the offered services and the network parameters necessary to join the advertised BSS. WAVE users interested in services offered by the WAVE providers can respond with an acknowledgment (ACK). After the CCH interval, WAVE users that successfully transmit the ACK in the CCH interval switch to SCHs, and start to exchange data with WAVE providers.
3 Multi-channel Coordination Based MAC Protocols
The multi-channel coordination based MAC protocols are compliant with the specified standard of IEEE 802.11p/WAVE. As shown in Fig. 3, we classify the current VANET Multi-channel coordination based MAC protocols into two main categories: dynamic interval division protocols and enhancing multi-channel operations protocols. In the former, CCH/SCH intervals are adjusted dynamically based on the traffic load in a distributed manner. In the latter, the length of CCH/SCH intervals is kept fixed while adding some mechanism to enhance the IEEE 1609.4 standard. In this section, we review existing works on multi-channel coordination based MAC protocols.

Taxonomy of VANET Multi-channel coordination based MAC protocols
3.1 Dynamic Interval Division Protocols
Dynamic Interval Division multi-channel MAC (DID-MMAC) protocol: DID-MMAC presents the first protocol that proposes an adaptive MAC with dynamic interval division for WAVE system [5]. As explained in Fig. 4, in DID-MMAC according to different types of frames, the CCH Interval is further splitted into Service Announce Phrase (SAP), Beacon Phrase (BP) and Peer-to-Peer Reservation Phrase (PRP). WSA frame and Beacon frame are transmitted in the SAP and BP, respectively. WSA frame is used to indicate the existing service in vehicle network, beacon frame is used to exchange vehicle status frame. While exchanges of control frame for SCH reservations are performed in PRP. DID-MMAC assigns different channel access priorities (i.e., contention window (CW) and the inter-frame space (AIFS)) for both frames SAP and BP, in order to adjust dynamically these frames in a distributed manner.

DID-MMAC scheme
As shown in Fig. 4 PRP starts right after BP. In DID-MAC the duration of PRP is adjusted adaptively according to the estimated traffic load, based on two new fields called Service Indication (SI) and Traffic Indication (TI), added respectively into WSA and beacon frame. Since the SI field indicates the total data size of service, on the other hand, the TI field indicates the service status in vehicle side. However, this protocol did not provide channel selection algorithms, and did not take into consideration the collision from other vehicles that belong to the same contention domain.
Variable CCH Interval (VCI) protocol: VCI consists of well-known multi-channel MAC protocols for VANET, proposed by Wang et al. [6]. The VCI multi-channel MAC adjusts dynamically the CCH and the SCH intervals, to enhance the real-time delivery of safety/control packets, and to provide proper bandwidth for delivery of the application information. As shown in Fig. 5, VCI divides the CCH interval into safety interval and WSA interval. During the safety interval, vehicles transmit periodic beacons, while the vehicles exchange control messages for SCH reservations in the WSA interval. The WAVE providers broadcast WSA packets containing both information of service and identities of SCHs to be used. The WAVE users can either respond to the WSA packet with an acknowledgement (ACK) or initiatively send a Request For Service (RFS) packet to make an agreement with a WAVE provider.

VCI scheme
In VCI scheme, the duration of safety interval is determined as:
where N represents the total number of vehicles sending safety packets, f is the sending frequency of safety messages, \(B_{cch}\) is the data rate of CCH and \(\alpha \) is a predefined factor.
The duration of \(T_{WSA}\) is estimated by the roadside unit (RSU), based on the average time consumed on the CCH for the negotiation of service packet transmission. Basically, both safety and WSA intervals are calculated by the RSU, then the RSU broadcasts a VCI packet containing the length of the CCH interval to the vehicles within their coverage range. Moreover, when no RSU can be detected, the VCI scheme selects one of vehicles within one hop to be a leader, in order to play the role of RSU. The main drawback of VCI protocol that it depends on RSU to calculate \(T_{safety}\) interval, and it does not address the hidden node problem.
Dynamic CCH Interval (DCI) MAC protocol: DCI works identically to VCI protocol except the calculation of the WSA interval, it was proposed by D. Zhu et al. [7]. In DCI the optimal WSA interval is calculated based on the probability distribution of the reservation time for service packet in the CCHI.
DCI defines k as the maximum number of service data packets which can be transmitted on a given SCH interval. Then, it derives the minimum WSA interval for reserving the transmission of service packets. Finally, DCI obtains the optimal WSA interval by finding the optimal k to minimize the difference between the sum of WSA and SCH interval and the residual synchronization interval except the safety interval.
Dynamic Safety Interval (DSI) protocol: DSI allows the safety interval to accommodate transmissions from vehicles within the same contention domain as well as from hidden vehicles [8]. The region within which hidden vehicles reside is affected by three types of ranges related to packet transmissions in the IEEE 802.11MAC: transmission range (\(r_{t}\)), carrier sensing range (\(r_{c}\)), and interference range (\(r_{i}\)). These ranges are tunable parameters, they affect significantly the MAC performance. Measurement studies such as [9] demonstrate that \(r_{t}< r_{i} < r_{c}\).
Hidden nodes refer to the nodes located within \(r_{i}\) of the intended destination and out of \(r_{c}\) of the sender. When a receiver is receiving a packet, if a hidden node tries to start a concurrent transmission, collisions can happen at the receiver. DSI defines \(d_{sr}\) as the spatial reuse distance with \(d_{sr} > r_{t} + r_{i}\). Then, it allows to each vehicle i to share the safety interval with vehicles whose distance from i is smaller than \(d_{sr}\). In DSI, the extended contention domain (ECD) is defined as the region where vehicles sharing the safety interval reside. Given ECD, each vehicle calculates the number of vehicles within ECD, then derived the safety interval as:
where N represents the total number of vehicles, DIFS is the inter frame space, \(\gamma \) is the average backoff time, and \(t_{trans}\) is the message transmission time. However, DSI calculates the length of safety interval in a deterministic way. Hence, the \(T_{safety}\) used to derive the safety interval is not optimal.
Context Aware Variable Interval MAC (CAVI-MAC) protocol: CAVI-MAC [10] reduces the interference for the propagation of critical event driven messages, by adjusting dynamically the control channel interval. In CAVI-MAC, the length of CCH is adjusted according to the neighborhood density and the type of safety message that is being disseminated currently in VANET. The safety message in VANET can be classified as periodic safety message and event-driven safety message. In periodic safety message, each vehicle automatically broadcasts safety messages at regular intervals (steady state). While in event-driven safety message, safety messages are broadcasted only in case of an unsafe situation (non-steady state).
Each vehicle listens to the exchanged information for one synchronization interval to gain insights about the context of the environment (i.e., steady or non-steady state). Based on the type of safety message, the CCH interval is given as: \(T_{cch} = (L/D + AIFS) \times NBR\_CTR \times \alpha \), during steady state. Where L is the length of the packet, D is the data rate, AIFS is the Arbitration Inter Frame Space, \(NBR\_CTR\) is a counter giving the number of beacon messages a vehicle receives during a given Synchronization Interval (SI) and \(\alpha \) is a predefined scale up factor. Or as: \(T_{cch} = (SI - 2 \times GI) \times LI /10\), during non steady state. Where LI is the Length Index which specifies the ratio between CCH and SCH, and GI represents the guard interval. CAVI-MAC protocol provides a virtual interference free environment, to tackle the hidden terminal problem. However, as the vehicle density increases, the CCHI increases and SCHI decreases in a given SI, which reduces the throughput over SCH.
3.2 Enhancing Multi-channel Operations Protocols
Enhanced Multi-channel MAC (VEMMAC) protocol: VEMMAC allows to vehicles to transmit non-safety messages during CCH interval and broadcast safety messages twice with each in the CCH and SCH interval [11]. To achieve this goal, the vehicles in VEMMAC have two transmission modes: Normal Transmission (noted N-Tx) which is the transmission performed within the SCH interval and Extended Transmission (noted E-Tx) which is the transmission performed in SCH interval and the upcoming CCH interval. Based on the traffic load, the sender decides which transmission mode is going to use.

VEMMAC scheme
As indicated in Fig. 6, the synchronized interval is divided into CCH and SCH intervals. To exchange non-safety messages, vehicles try to access the control channel to reserve one of the available service channels only during the CCH interval. When a node wants to broadcast the safety messages (SMsg), it has to switch to the CCH channel and contends the control channel to broadcast a safety message in the current interval (CCHI or SCHI). Then, it attempts to broadcast the safety message again if it is still valid in the next interval, in order to allow to all vehicles to receive the safety message.
To reserve the available service channel, vehicles in VEMMAC are based on two data structures called Neighbor Information List (NIL) and Channel Usage List (CUL). Since the NIL maintains the information of the neighbor vehicles, the CUL stores the information of channel. A serious drawback of VEMMAC is its incapability to oversee the high collisions at the beginning of the CCHI or SCHI, also vehicles might lose the emergency packets on the CCH due to the extended transmission mode.
Efficient and Reliable MAC (VER-MAC) protocol: VER-MAC allows vehicles to broadcast safety packets twice during both CCHI and SCHI to increase the safety broadcast reliability [12]. Moreover, the VER-MAC uses efficiently the SCH resources during the CCHI to enhance the service throughput. As indicated in Fig. 7, VER-MAC functions identically to VEM-MAC in transmitting the EMG packet (safety packet). In VER-MAC, On each SCH, the synchronized interval (SI) is divided into M transmission slots (TxSlots) which are used for the collision-free service data transmissions. Each vehicle pair performs a WSA handshake to select the available TxSlot of service channels (SCH), based on two data structures NIL and CUL as VEMMAC. The major drawback of VER-MAC is that it requires additional complex data structures and suffers from the large delay of emergency packets.
Group Reservation MAC (GRMAC) protocol: GRMAC allows vehicles to exchange their CCH bandwidth requirement and reserve the CCH bandwidth in SCHs during SCHI [13]. The aim of GRMAC is to minimize the number of collisions in CCH and regulate the ratio of the bandwidth consumed by both the WAVE Short Message (WSM) traffic and the WSA traffic. To achieve these goals, GRMAC divides vehicles into groups called \(RG_{i}\), each of which comprises a set of vehicles using the same \(SCH_{i}\).

VERMAC scheme

GRMAC scheme
As displayed in Fig. 8, in GRMAC, the CCHI is further split into Group Reservation Interval (GRI) and Contention Interval (CI). The former is used for the reserved CCH bandwidth, and the latter is used by vehicles which did not reserve the CCH bandwidth in SCH during the previous SCHI. During the SCHI, each vehicle within the same SCH (RG) requiring CCH to transmit data can reserve CCH bandwidth, based on the bandwidth reservation notification (BRN). A BRN contains two one-bit fields: WSM and WSA fields, used by each vehicle to notify other vehicles of its demand to transmit WSM/WSA traffics in CCH in the following CCHI. The RGs sequentially (based on their SCH number) reserve the CCH bandwidth and transmit data over CCH during CCHI. The GRMAC divides the GRI into \(GRI_{WSM}\) and \(GRI_{WSA}\) for WSM and WSA traffics, respectively. Each RG sequentially transmits WSMs during \(GRI_{WSM}\) and then transmits WSAs during \(GRI_{WSA}\). Both \(GRI_{WSM}\) and \(GRI_{WSA}\) have a maximum length (\(GRI_{WSMmax}\) and \(GRI_{WSAmax}\)) that prevents one of these two traffics from consuming all of the CCH bandwidth. Vehicles want to disseminate frames over CCH, which did not reserve CCH bandwidth in SCH during the preceding SCHI start transmission right after RGI. However, GRMAC does not discuss how to resolve the collision problem that occurs during CI.
4 Qualitative Analysis of Multi-channel Coordination Based MAC Protocols
In this section we qualitatively analyze the existing multi-channel coordination based MAC protocols, we also identify some open issues and possible directions of future research.
4.1 Qualitative Analysis
The qualitative analysis is done according to a few important metrics that we have deduced from the literature. Such as:
-
SCH negotiation method: The SCH negotiation method used by protocols to achieve significant increase in channel reliability, throughput and delay constraints.
-
Consideration of hidden nodes: Does the protocol consider the existence of hidden terminal?
-
Dependency on RSU: Does the design of the protocol uses the Road Side Unit (RSU)?
-
Control message overhead (bits/periodic message): Additional data sent along with the message through the network towards a destination uses a portion of the available bandwidth.
-
Considered traffic condition: Refers to the type of traffic used by the protocol (saturated, unsaturated or both (none)).
-
Considered application type: Indicates the type of application addressed by the protocol (safety, non safety application or both).
Table 1 gives a qualitative comparison of various existing multi-channel coordination based MAC protocols. DID-MMAC, VCI, DCI, VERMAC and GRMAC protocols are designed to work well in saturated traffic condition (i.e., the system always has a message to transmit), in a realistic scenario, it can exist cases where the traffic condition is unsaturated. Hence, in order to model a realistic scenario, DSI, VEMMAC and CAVI-MAC protocols are designed to work well under any traffic conditions. The fact that each node measures the traffic load in the dynamic interval division protocols, causes the message overhead by adding new fields into each beacon message. As shown in Table 1, each dynamic interval division protocol has its own message overhead. However, the overhead of a single message is insignificant compared to the size of control and beacon message ranging from 100 bytes to 300 bytes.
The deployment and maintenance of an RSU is a costly affair, hence MAC protocols must be autonomous, not depending on RSU. VCI and DCI protocols are dependent on the RSU for there normal working. On the other hand, the rest of protocols are functional without the help of RSU. Regarding the SCH reservation method, VCI, DCI, VEMMAC and VERMAC introduce a new SCH negotiation denoted by WSA/RFS/ACK exchange for VCI and DCI protocols, SCH-REQ/SCH-ACK/SCH-RES handshake and WSA/ACK/RES handshake for VEMMAC and VERMAC, respectively, while DID-MMAC exploits an existing protocol called the modified MMAC [14]. However, DSI, CAVI-MAC and GRMAC do not treat the SCH negotiation.
The aim of studying vehicular ad hoc networks (VANETs) is to ensure road safety (safety applications) and to maximize the throughput metric for non-safety applications. The DID-MMAC, VCI, DCI, VEMMAC, VERMAC and GRMAC protocols are studied and handled both types of application (safety and non-safety). However, DSI and CAVI-MAC protocols have just addressed the safety applications. Regarding interference from hidden nodes, DSI and CAVI-MAC protocols take into account this issue in the design of their protocols. DSI protocol handles this problem in a deterministic way, while CAVI-MAC protocol dynamically considers hidden terminals thereby minimizing the effect of interference in real time. DID-MMAC, VCI, DCI, VEMMAC, VERMAC and GRMAC protocols remain silent about this issue.
4.2 Open Issues and Future Research Directions
It is apparently seen so far that significant efforts have been made in designing effective MAC protocols for VANETs. However, there is a high potential to improve current MAC methods in the future. A few important open issues are summarized as follows:
-
(1)
Safety applications require a low latency and high reliability communication service. In emergency situation, the safety-critical messages are limited lifetime due to mobility of nodes and fast topology changes. As a result, MAC protocols have to take into account an efficient broadcasting and reliable delivery for safety-critical messages with bounded latency requirement.
-
(2)
Hidden terminal is a serious issue in the design of MAC protocols, because it deteriorate the MAC layer performance. Only a few researchers have discussed this problem for MAC protocols in VANETs. Hence, this issue needs to be studied and integrated in the design of MAC protocols in VANET.
-
(3)
Mobility is one of the main characteristic of VANETs, it has an important impact on the performance of MAC protocols. Therefore, the design of this protocols should address mobility issues and estimate accurately the condition of the highly dynamic channel, in order to enhance the MAC performance and ensure better fairness by providing different priority levels to vehicles based on their mobility.
-
(4)
Most of MAC protocols in VANET discus only the safety applications due to their importance, while VANET provides also the non-safety applications. Therefore, MAC protocols should allow a tradeoff between safety and non-safety applications in order to achieve better utilization of channel.
-
(5)
Further research would be needed to design cross layer MAC protocols in VANETs. For instance, physical layer and network layer can achieve transmission range adjustment and efficient routing designing protocols, which can enhance and facilitate the designing of MAC protocols.
5 Conclusion
VANETs have attracted increasing attention in recent years for their extensive applications. Due to their characteristics, the design of MAC protocol is full of challenges in VANETs. In the past, much efforts have been made in designing effective MAC protocols for VANETs. In this paper, we proposed a survey of multi-channel coordination based MAC protocols which improve the performance of IEEE 802.11p- and IEEE 1609.4-based WAVE systems. Moreover, we summarized the operation of existing protocols and discussed the advantages and disadvantages of each one. Finally, we defined some open issues and possible directions for future research related to multi-channel coordination protocols for VANETs.
We hope that this survey provides a more expansive understanding of multi-channel coordination based MAC protocols in VANETs for readers, also gives an overview of the existing problems in the design of MAC protocols.
References
Karagiannis, G., Altintas, O., Ekici, E., et al.: Vehicular networking: a survey and tutorial on requirements, architectures, challenges, standards and solutions. IEEE Comm. Surv. Tut. (2011)
IEEE 802.11p: wireless LAN medium access control (MAC) and physical layer (PHY) specifications amendment 6: wireless access in vehicular environments (2010)
Booysen, M.J.: Survey of media access control protocols for vehicular ad hoc networks. IET Commun. (2011)
IEEE Std. 1609.4TM-2006: IEEE trial-use standard for wireless access in vehicular environments (WAVE)—multi-channel operation (2006)
Liu, L., Xia, W., Shen, L.: An adaptive multi-channel MAC protocol with dynamic interval division in vehicular environment. ICISE (2009)
Wang, Q., Leng, S., Fu, H., Zhang, Y.: An IEEE 802.11p-based multi-channel MAC scheme with channel coordination for vehicular ad hoc networks. IEEE Trans. Intell. Transp. Syst. (2012)
Zhu, D., Zhu, D.: Performance analysis of a multi-channel MAC with dynamic CCH interval in WAVE system. In: 2nd International Conference on System Engineering and Model (2013)
Hongseok, Y., Jinhong, K., Dongkyun, K.: A dynamic safety interval protocol for VANETs. In: 27th ACM Research in RACS (2012)
Anastasi, G., Borgia, E., Conti, M., Gregori, E.: Wi-Fi in ad hoc mode: a measurement study. In: 2nd IEEE Annual Conference on PERCOM 04 (2004)
Babu, S., Patra, M., Siva Ram Murthy, C.: A novel context-aware variable interval MAC protocol to enhance event-driven message delivery in IEEE 802.11p/WAVE vehicular networks. Veh. Commun. (2015)
Dang, D.N.M., Dang, H.N., Do, C.T., Hong, C.S.: An enhanced multi-channel MAC for vehicular ad hoc networks. In: IEEE WCNC (2013)
Dang, D., Hong, C., Lee, S., Huh, E.: An efficient and reliable MAC in VANETs. IEEE Commun. Lett. (2014)
Chen, Y., Lai, C., Lai, C., Li, Y.: A group bandwidth reservation scheme for the control channel in IEEE 802.11p/1609 networks. In: 10th International Conference (2015)
So, J., Vaidya, N.: Multi-channel MAC for adhoc networks: handling multi-channel hidden terminals using a single transceiver. In: 5th ACM International Symposium on MOBIHOC (2004)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer Science+Business Media Singapore
About this paper
Cite this paper
Ouyous, M., Zytoune, O., Aboutajdine, D. (2017). Multi-channel Coordination Based MAC Protocols in Vehicular Ad Hoc Networks (VANETs): A Survey. In: El-Azouzi, R., Menasche, D.S., Sabir, E., De Pellegrini, F., Benjillali, M. (eds) Advances in Ubiquitous Networking 2. UNet 2016. Lecture Notes in Electrical Engineering, vol 397. Springer, Singapore. https://doi.org/10.1007/978-981-10-1627-1_7
Download citation
DOI: https://doi.org/10.1007/978-981-10-1627-1_7
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-10-1626-4
Online ISBN: 978-981-10-1627-1
eBook Packages: EngineeringEngineering (R0)