
Abstract
The recent catastrophic tsunamis show that it is now more than ever necessary to assess tsunami hazard for all coastal communities. In fact, facing the dangerous increase of population in low-lying coastal areas during the last decades directly linked to the reduction of the natural defences against sea assaults, including tsunamis, and considering the economy of most of the concerned countries, solutions should be found quickly to protect those populations and/or mitigate the hazard. In that way, recent studies and post-event field observations have highlighted the protective role played by coral reefs and the consequences of their destructions on the tsunami amplitudes. In this study previous results about the effect of fringing coral reef geometry on the tsunami amplitude are discussed using numerical modeling of nonlinear shallow water equations (NAMI-DANCE code). For this purpose, a set of different artificial Digital Elevation Models has been prepared in agreement with real bathymetric profiles and results of simulations are compared and discussed together with the conclusions obtained by the other authors.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others
Keywords
8.1 Introduction
After the 2004 Indian Ocean event causing a record death toll of about 300,000, several tsunamis have highlighted again the waves’ capability of destruction, leading also to significant loss of life especially in the American Samoa, 2009 (Okal et al. 2010), in Chile, 2010 (Fritz et al. 2011), in Japan, 2011 (Stimpson 2011), and above all in Indonesia that has been the target of several other tsunamis since the big one (McAdoo et al. 2006; Fritz et al. 2007; Lay et al. 2011). Globally coastal communities attempt to find some solutions to face potential tsunami impacts (Rahman 2012) using different methods. According to recent works it is now clear that population protection depends mainly on education and awareness about the phenomenon and what to do in priority (Alexandra et al. 2009; Orcutt et al. 2011). Nevertheless it is also important to protect infrastructures besides human beings (Fraser et al. 2012).
Numerous research projects appeared in the early times after the 26th December 2004 tsunami, national as well as international, aiming at resolving major questions like which parts of the world coastlines are under tsunami threat, what is the potential of tsunami hazard, and how to protect the concerned coastal communities?
As in some places in Japan, the easiest way would be to build concrete sea defences (seawalls, tetrapod blocks, etc.) along the coasts but even in the case it could be feasible economically (Prasetya et al. 2008), the consequences on both environment and tourism especially in places annually frequented by hundreds of thousand people for their postcard sandy beaches could be irreversible (Schleupner 2005; Phillips and Jones 2006). In this way, Vuren et al. (2004) ask how coastal defences and societal activities in the coastal zone are compatible. In addition to this, Airoldi et al. (2005) try to propose an ecological perspective for the deployment of coastal defence structures but they would certainly be reserved for economically-rich countries, most of time less concerned by tsunami impacts. So to avoid this, people look at available natural means which could be rehabilitate and/or preserved in order to protect human beings against potential destructive tsunami waves (Tanaka 2009).
Studies dealing with the impact of several tsunamis after 2004 shows clearly that mangroves, coastal forests (like she-oak forests for example) and coral reefs represent natural barriers (Chatenoux and Peduzzi 2007; Kerr and Baird 2007; Cochard et al. 2008; Yanagisawa et al. 2009). The present problem is that the forests and mangroves tend to disappear globally, due to the dramatic increasing of coastal population (<100 km from shoreline) during the twentieth Century imposing a conversion of these flat and fertile coastal landscapes into agricultural and more generally industrial purposes (Valiela et al. 2001, 2009; Valiela 2006). Coral reefs seem to be less impacted even if they also tend to disappear for reasons like anthropogenic impacts as pollution and overfishing, but also because of storms and global warming (Wilkinson 1999; Bouchon et al. 2008a, b; Sale 2011). The main interest of coral reefs and finally, the reason of this study, is that it is generally accepted that they represent an efficient mean of protection against wave assaults (wind waves, swells, tsunamis) by most of coastal communities (Clark 1991; Frihy et al. 2004; SDMRI Report 2005; Liu and Ghidaoui 2009), being able to reduce classic wave energy until 71 % between the forereef and the reef crest (Lugo-Fernandez et al. 1998). But are they as efficient for tsunami waves as for wind-driven waves? What is the reality according to recent tsunami observations? What are the limitations of this free protection?
Nott (1997) shows that the tsunami triggered by the 1994 East Java Mw = 7.6 earthquake has been able to penetrate through the Australian eastern fringing coral reef off Cairns due to substantial gaps (funneling effect in 5–10 km wide passages) and impact the coast in front of these gaps as in the case of storm-generated waves (Young and Hardy 1993).
Several recent studies have been led to demonstrate the role played by coral reefs on tsunami waves, focusing on field observations and/or numerical modeling in order to assess which parameter of the geometry or the bottom friction would have the worst consequences on the tsunami amplitude and frequency content (Baba et al. 2008), flow speed (Fernando et al. 2008) and coastal run-up (Kunkel et al. 2006; Liu and Ghidaoui 2009; Gelfenbaum et al. 2011). In the following we discuss the impact of parameters as reef width, lagoon width, water depth, friction or the presence of gaps, using an artificial bathymetric model (a digital elevation model, D.E.M.) of a coral reef facing a sloping beach on which we model tsunami generation and propagation with NAMI-DANCE modeling code. This study follows principally the work of Kunkel et al. (2006) and Liu and Ghidaoui (2009).
8.1 Definition
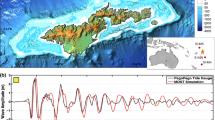
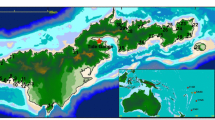
Commonly, a fringing reef is a reef located close to the shore with a maximum separation of several hundred meters (i.e. the backreef channel or shallow lagoon width, also called ‘boat channel’) with a depth of maximum 5–10 m, to distinguish with a barrier reef, separated from the coast by a deep water-lagoon (Kennedy and Woodroffe 2002; Smithers et al. 2006). As indicated by Kennedy and Woodroffe (2002), the simplest fringing reef shows a reef crest directly attached to the shoreline, without backreef channel. Figure 8.1 shows an example of the typical scheme of a fringing coral reef located behind a barrier reef (Martinique, French Caribbean Island).

Example of a combine coral reef along the eastern coast of Martinique Island: the blue and red lines highlight respectively the fringing and barrier reefs (Over a picture from Adey et al. 1977)
A depth profile of high resolution multibeam bathymetric data from the SHOM (Service Hydrographique et Océanographique de la Marine, France) reveals the typical coastal morphology of such coral environment. Geographic location of Martinique Island is indicated on the Google Earth view.
8.2 Tsunami Modeling
8.2.1 Modeling Code
NAMI-DANCE is a numerical modeling code used in this study. It is a modified version of the Japanese TUNAMI N2 numerical code (Imamura 1989, 1995) based on the solution of nonlinear shallow water equations (Zaytsev et al. 2009). The initial deformation calculation is based on elastic dislocation computed through Okada’s formula (1985). This method assumed an instantaneous displacement of the sea surface identical to the vertical deformation of the seafloor (transmitted without losses to the entire water column), and solves the hydrodynamical equations 8.1, 8.2 and 8.3 of shallow water written in cartesian or spherical coordinates (Imamura et al. 2006). Non-linear terms are taken into account, and the resolution is carried out using a second-order explicit leap-frog finite different scheme. Wave dispersion is also considered.
D = h + η corresponds to the total water depth where h is the still water depth and η the sea surface elevation; v is the horizontal velocity vector; M and N are the water velocity fluxes in the x and y directions; τ x and τ y correspond to the bottom friction in x and y directions; g is the acceleration due to gravity (for more details see Dao and Tkalich 2007).
As most of tsunami modeling codes, this one allows the introduction of a specific initial disturbance like a single leading wave (solitary wave) as we will show in the following. It allows also the adjustment of the bottom friction coefficient f, linked to the Manning’s roughness coefficient n by relation 8.4; the value of the Manning’s roughness coefficient is set to 0.025 s/m1/3 by default, a value commonly used, corresponding to a sandy bottom or bed rock cut channel (Linsley and Franzini 1979; Venturato et al. 2004), i.e. mildly rough interface. The value for coral reefs is not well-known as indicated by Kunkel et al. (2006). Imamura (2009) notices that this coefficient should be considered principally when the spatial grid size is larger than the scales of structures: in that case the bathymetric features are not correctly reproduced and thus the interaction between them and the waves is not well reproduced. In our case, the spatial resolution of the grid being 2 m, it encompasses largely the reef structure wavelength. Thus the role played by the friction coefficient will not be shown in the following as it has already been discussed by Kunkel et al. (2006): the authors conclude that the frictional effect lead to an energy dissipation of tsunami waves underlined by a run-up decrease of about 50 % for a variation of the drag coefficient of 0.03 to 0.1; the relation between Manning’s and drag coefficients is explained in Rosman and Hench (2011). Fernando et al. (2008) reached the same conclusion of a considerable impact of coral friction on wave propagation and tsunami flow speed using a flume experiment with a synthetic coral reef showing a gap or not. Another part of energy dissipation is also due to wave breaking or reflection when passing through the reef, especially in the case of a reef located far offshore (typically a barrier reef).
8.2.2 Artificial DEM: Scenarios
For the purpose of this study, because of the multiplicity of existing geometries of fringing reefs, a typical fringing reef profile presented in several previous studies concerning coral reefs (Fig. 8.2) has been chosen to build an artificial D.E.M. with adaptive geometry (Fig. 8.3).

Schematic profile of a coral reef in front of a sloping beach (Adapted from http://geology.uprm.edu/Morelock/reef.htm)

Profile and top view of an idealized coral reef showing a gap in front of a sloping beach
Tsunami propagation is calculated over a 2 m – resolution bathymetric grid (i.e. D.E.M.) of dimension 1,500 × 1,500 m of a schematic coral reef in front of a sloping beach. Aiming to determine the role played by the main parameters as the reef width, the lagoon width, the channel width, the water depth upon the reef and the link between all of them, a set of different grids georeferenced in geographic coordinates has been prepared using a MATLAB subroutine. The resolution has been chosen with respect to real coastal feature (coral reef) wavelengths in order to reproduce as well as possible the shoaling effect, resonance phenomenon, etc.
The water thickness above the reef crest allows to test the case of a tsunami occurring at the same time of a storm surge or to consider the tide (low or high tide).
Here we only show the main results obtained with a handful of scenarios whose characteristics are presented in Table 8.1. An example of 3-dimensionnal D.E.M. is presented on Fig. 8.4: it corresponds to the case of a 100 m-wide reef with a 100 m-wide channel enclosing a 300 m-wide lagoon.

Example of a D.E.M. prepared for tsunami propagation
Tsunami propagation is calculated over each D.E.M. using the same initial deformation. For this preliminary study the initial deformation of the sea surface corresponds to a 3 m-high leading wave (only the positive peak) generated in the grid domain (Fig. 8.5) and showing a shape mimicking roughly a real tsunami wave. Six synthetic virtual tide gages (mareographs) have been located on this grid in order to record wave profiles as a function of time in strategic sites.

Initial surface deformation (top view) obtained with NAMIDANCE in front of the reef (the black rectangular lines represent the bathymetric and topographic isohypses with a step of 5 m). The tides gages used to compare the signals are located with red crosses
8.2.3 Results
Propagation of a tsunami-like wave (the leading wave) has been done upon 60 different bathymetric grids. The interaction between this wave and the coral reef is shown on Fig. 8.6. It highlights the wave shoaling on the forereef because of depth decreasing, overtopping of the reef crest, refraction through the reef due to the presence of a gap and reflection on the shoreline. Run-up calculations are not shown here as they have already been discussed by Kunkel et al. (2006).

Tsunami initiation and propagation (red arrow indicates direction) sketch towards a fringing coral reef showing interaction at a time step of 15 s
Figure 8.7 represents the maximum wave heights reach on each point of the grid after the propagation time. It reveals that the maximum wave heights reached in the near region behind the gap are more important than in region located behind healthy reef (without gap) as shown by Liu and Ghidaoui (2009). The gap (channel) in the reef leads to the diffraction of the incident wave-train which is followed by two main wave paths propagating in the lagoon towards the beach. They could be explained by wave interference between the refracted wave in the gap, the reflected wave on the beach and the overtopping wave. Amongst the 60 tests done during this study, we will concentrate on the most important related to post-event field observations:

Maximum wave height map of a scenario with a gap in the reef. It highlights two main wave paths inside the lagoon
-
(a)
The sensitivity of the gap width is highlighted on Fig. 8.8a with 3 results of tsunami propagation at the same point (gage 5, Fig. 8.5) inside the lagoon for respectively 10, 50 and 100 m-wide channel. It indicates that an identical incident wave would have more energy, in terms of maximum wave amplitude, passing through the coral reef and thus able to reach the shore and inundate it
Fig. 8.8 
Tide gage comparisons; the name of each gage LAGOON# refers to a number of gage in Table 8.1. In each case only one parameter changes: (a) reef channel width: 10, 50 and 100 m; (b) reef width: 10, 50 and 100 m; (c) lagoon width: 10, 50 and 100 m; (d) reef crest depth over a 10 m-wide reef: 0 and 1 m; (e) reef crest depth over a 100-m wide reef: 0 and 1 m; (f) no gap, no reef and a reef with a 10 m-wide gap
-
(b)
Variation of the reef’s width from 10 to 50 and 100 m (Fig. 8.8b) highlights that the wave amplitude near the shore will be less important with a larger reef. The incoming wave showing a wavelength of about 100 m is reduced by about 25 % and 85 % over a 10-m wide and 100-m wide reef respectively (Fig. 8.9). It is in agreement with results of numerical modeling carried out by Mohandie and Teng (2009) who indicate that the reef is effective as a natural barrier for tsunamis with a width of about the same order of magnitude as the incoming wavelength
Fig. 8.9 
Wave attenuation as a function of reef width: blue curve represents the initial signal recorded near the source; red and black curves represent respectively the recorded signal in the lagoon after passing over a over 10 m and 100 m-wide reefs
-
(c)
In the same way, Fig. 8.8c shows that wave amplitude (of the first peak) will be less important with a larger lagoon
-
(d)
and (e) The tests of the role played by the water depth upon the reef crest indicate that this water depth has not a so-significant impact on the wave amplitude as the precedent parameters if the reef is 100 m-wide, but upon a 10 m-wide reef, a water depth of 1 m leads to larger wave amplitude in the lagoon than with a water depth of 0 (Fig. 8.8d, e)
-
(f)
Figure 8.8f illustrates the variation of signal with or without a gap in a 10 m-wide reef, and with and without a reef. As it has been already demonstrated, the presence of the reef has a direct impact on the amplitude of the tsunami near the coast. With unchanging roughness parameter the presence of a reef nearly divides by two the wave height in the lagoon


The tsunami height inside the lagoon after passing upon a reef without gap or with a 10 m-wide gap does not show substantial difference than in the case of a 50 or 100 m-wide gap (Fig. 8.8a) but however, the wave height without gap is less important, in agreement with Fernando et al. (2008) or Marris (2005).
8.3 Discussion and Conclusion
Our methodology of using an artificial D.E.M. that could be adapted for all the situations provides a useful tool to test the role played by each parameter of the geometry of a coral platform.
Our results agree with recent numerical experiments and several reported witnesses of a tsunami particular behavior linked to the existence of a fringing coral reef over the past two decades.
The role played by gaps is strongly underlined and converged on all the previous results. Indeed gaps allow a larger part of wave energy to pass through the reef contrarily to good-health reef (without gaps) in addition to the speed increase of the water flow due to a funneling effect inside the gaps (Liu and Ghidaoui 2009; Tanaka 2009). Besides, Nott (1997) indicates that the 1994 tsunami was probably amplified when passing through those gaps or as a result of resonance, diffraction or refraction phenomenon between the reef and the coast. He concludes that Cairns coast is finally not protected against such waves. Despite this, the role played by gaps and coral friction in general has been confirmed recently several researsch teams as Fernando et al. (2008) who discuss about the 2004 Sumatra tsunami impacting Sri Lanka coastlines. In their study they clearly demonstrate that the variation of friction underlined by the poaching and/or destruction of corals, equivalent to the creation of gaps within the reefs, leads to a substantial increase of tsunami flow velocity, because of reducing the bottom drag coefficient or roughness coefficient (Rosman and Hench 2011).
This is in agreement with the work of Lowe et al. (2005) who study the energy dissipation over a reef for classic waves; they conclude that the attenuation is due to the bottom friction often prevailing on wave breaking (on the contrary of what happens on a sandy beach). This is further demonstrated for tsunami waves by Kunkel et al. (2006) whose numerical experiment of tsunami propagation over a reef allow to propose a relation between run-up and drag coefficient (directly linked to the roughness coefficient; Wu et al.,1999).
The previous authors, which work has been partially tested with another method by Liu and Ghidaoui (2009), show also that the run-up over an idealized topography located behind the reef is directly linked to the reef width; but they are cautious with the results interpretation underlining the dependence of the run-up with the incident wavelength and amplitude as well as the geometry and health of the reef.
In the same way, Baba et al. (2008) model the propagation of the 2007 Solomon Islands tsunami through the Australian North-eastern coastline with and without the Great Barrier Reef and conclude that the reef reflects much of this low-amplitude tsunami energy, that the energy passing through is divided because of the gaps, and above all, that in addition to wave shoaling and breaking, the reef slows the waves down, delaying the tsunami impact.
They also indicate that the bottom friction of the reef should influence the tsunami as previously tested by Kunkel et al. (2006), hypothesis that has been confirmed more recently by the work of Gelfenbaum et al. (2011) for the 2009 American Samoa tsunami. On the contrary, the effectiveness of the reefs protective role is debated theoretically by Lynett (2007) who concludes that for very small obstacle lengths, i.e. typically a fringing coral reef compared with travelling tsunami wavelength, the reduction induced by the reef on the tsunami run-up and the maximum velocity will be inconsequential.
In that way, Roeber et al. (2010) demonstrate that the shallow reefs surrounding Tutuila Island were not enough to protect the coastline from the 2009 Samoa tsunami and they add the report of local resonances of short-period dispersive waves due to energy trapping within shallow lagoons, triggering more catastrophic consequences, highlighted on site by large disparities of impact along the coast. Nonetheless, the different conclusions reached by all these studies seem to agree globally with the fact that everything depends primarily on the reef width which induce dissipation through bottom friction, the presence and size of gaps, and on the incident wave height, especially if it exceeds the average depth of the top of the reef.
To summarize, in this study we show that the geometry and the location of the fringing coral reef (more or less close to the coast) including gaps or not plays an important role on the tsunami behavior in agreement with the existing studies (Kunkel et al. 2006; Fernando et al. 2008; Liu and Ghidaoui 2009; Baba et al. 2008; Gelfenbaum et al. 2011).
Tsunami waves seem to behave as classical waves as long as their characteristics stay within the same range of amplitude and respects the water depth over the reef. The tide or the weather condition (occurrence of a storm surge) should be considered accordingly to this fact. The greatest protection from destructive tsunamis will come from wide and high rough coral reefs, showing as little gaps as possible (Gelfenbaum et al. 2011).
Furthermore, the presence of gaps and the so-enclosed water body surrounded by the coral reef and the coast could induced indirect effects of tsunami arrival like flow speed increase or resonance phenomenon leading to a considerable rise of wave amplitude as shown by Roeber et al. (2010).
It follows from this work that rehabilitation and protection of coral reefs, leading to recover man-made gaps principally, should be considered as a natural mean of tsunami defence structure together with economically interesting purposes (touristic diving, fish nesting, etc.).
8.3.1 Prospects
A more accurate study should be realized using real bathymetric data to compare to well-known events including friction coefficient variations, tests of different incident waves and a numerical code using Boussinesq solution to reproduce as well as possible wave breaking and dispersion phenomenon (Roeber and Cheung 2012).
References
Adey WH, Adey PJ, Burke R, Kaufman L (1977) The Holocene reef systems of Eastern Martinique, French West Indies. Atoll Research Bulletin 218. http://www.sil.si.edu/DigitalCollections/atollresearchbulletin/issues/00218.pdf
Airoldi L, Abbiati M, Beck MW, Hawkins SJ, Jonsson PR, Martin D, Moschella PS, Sundelöf A, Thompson RC, Aberg P (2005) An ecological perspective on the deployment and design of low-crested and other coastal defence structures. Coast Eng 52:1073–1087
Alexandra K, Cain G, Iwasaki P (2009) Tsunami education: a blueprint for coastal communities. Report of the pacific tsunami museum and county of Hawaii planning program, Honolulu, 90 p. http://www.tsunami.org/pdf/Final_Document_Tsunami_Blueprint.pdf
Baba T, Mleczko R, Burbidge D, Cummins PR, Thio HK (2008) The effect of the Great Barrier Reef on the propagation of the 2007 Solomon Islands tsunami recorded in Northeastern Australia. Pure Appl Geophys 165:2003–2018
Bouchon C, Portillo P, Bouchon-Navaro Y, Max L, Hoetjes P, Braithwaite A, Roach R, Oxenford H, O’Farrel S, Day O (2008a) Status of the coral reefs of the Lesser Antilles after the 2005 bleaching event. In: Wilkinson C, Souter D (eds) Status of Caribbean coral reefs after bleaching and hurricanes in 2005, Global Coral Reef Monitoring Network, and Reef and Rainforest Research Centre, Townsville 152:85–103
Bouchon C, Portillo P, Bouchon-Navaro Y, Louis M, Hoetjes P, de Meyer K, Macrae D, Armstrong H, Datadin V, Hardin S, Mallela J, Parkinson R, Van Bochove J-W, Wynne S, Lirman D, Herlan J, Baker A, Collado L, Nimrod S, Mitchell J, Morrall C, Isaac C (2008b) Status of coral reefs of the Lesser Antilles: The French West Indies, The Netherlands Antilles, Anguilla, Antigua, Grenada, Trinidad and Tobago. In: Wilkinson C (ed) Status of coral reefs of the world: 2008. Global Coral Reef Monitoring Network/Reef and Rainforest Research Center, Townsville, pp 265–279
Chatenoux B, Peduzzi P (2007) Impacts from the 2004 Indian Ocean Tsunami: analysing the potential protecting role of environmental features. Nat Hazards 40:289–304
Clark JR (1991) Coastal zone management. Land Use Policy 8(4):324–330
Cochard R, Ranamukhaarachchi SL, Shivakoti GP, Shipin OV, Edwards PJ, Seeland KT (2008) The 2004 tsunami in Aceh and Southern Thailand: a review on coastal ecosystems, wave hazards and vunerability. Perspect Plant Ecol Evol Syst 10:3–40
Dao MH, Tkalich P (2007) Tsunami propagation modelling – a sensitivity study. Nat Hazard Earth Syst Sci 7:741–754
Fernando HJS, Samarawickrama SP, Balasubramanian S, Hettiarachchi SSL, Voropayev S (2008) Effects of porous barriers such as coral reefs on coastal wave propagation. J Hydro Environ Res 1(3–4):187–194
Fraser S, Raby A, Pomonis A, Goda K, Chian SC, Macabuag J, Offord M, Saito K, Sammonds P (2012) Tsunami damage to coastal defences and buildings in the March 11th 2011 Mw 9.0 Great East Japan earthquake and tsunami. Bull Earthq Eng. doi:10.1007/s10518-012-9348-9
Frihy OE, El Ganaini MA, El Sayed WR, Iskander MM (2004) The role of fringing coral reef in beach protection of Hurghada, Gulf of Suez, Red Sea of Egypt. Ecol Eng 22:17–25
Fritz HM, Kongko W, Moore A, McAdoo B, Goff J, Harbitz C, Uslu B, Kalligeris N, Suteja D, Kalsum K, Titov V, Gusman A, Latief H, Santoso E, Sujoko S, Djulkarnaen D, Sunendar H, Synolakis C (2007) Extreme runup from the 17 July 2006 Java tsunami. Geophys Res Lett 34:L12602. doi:10.1029/2007GL029404
Fritz HM, Petroff CM, Catalan PA, Cienfuegos R, Winckler P, Kalligeris N, Weiss R, Barrientos SE, Meneses G, Valderas-Bermejo C, Ebeling C, Papadopoulos A, Contreras M, Almar R, Dominguez JC, Synolakis C (2011) Field survey of the 27 February 2010 Chile tsunami. Pure Appl Geophys 168(11):1989–2010
Gelfenbaum G, Apotsos A, Stevens AW, Jaffe B (2011) Effects of fringing reefs on tsunami inundation: American Samoa. Earth Sci Rev 107:12–22
Kennedy DM, Woodroffe CD (2002) Fringing reef growth and morphology: a review. Earth Sci Rev 57:255–277
Kerr AM, Baird AH (2007) Natural barriers to natural disasters. Bioscience 57(2):102–103
Kunkel CM, Hallberg RW, Oppenheimer M (2006) Coral reefs reduce tsunami impact in model simulations. Geophys Res Lett 33:L23612. doi:10.1029/2006GL027892
Imamura F (1989) Tsunami numerical simulation with the staggered leap-frog scheme (Numerical code of TUNAMI-N1). School of Civil Engineering, Asian Inst. Tech. and Disaster Control Research Center, Tohoku University
Imamura F (1995) Tsunami numerical simulation with the staggered leap-frog scheme (Numerical code of TUNAMI-N1 and N2). Disaster Control Research Center, Tohoku University, 33 p
Imamura F (2009) Tsunami modeling, calculating inundation and hazard maps. In: Bernard EN, Robinson AR (eds) The sea, tsunamis, 1st edn. Harvard University Press, Cambridge, 321–332 p
Imamura F, Yalciner AC, Ozyurt G (2006) Tsunami modelling manual (TUNAMI model). 58 p. http://www.tsunami.civil.tohoku.ac.jp/hokusai3/J/projects/manual-ver-3.1.pdf
Lay T, Ammon CJ, Kanamori H, Yamazaki Y, Cheung KF, Hutko AR (2011) The 25 October 2010 Mentawai tsunami earthquake (Mw 7.8) and the tsunami hazard presented by shallow megathrust ruptures. Geophys Res Lett 38:L06302. doi:10.1029/2007GL029404
Linsley RK, Franzini JB (1979) Water resources engineering. McGraw-Hill, New-York, 716 p
Liu H, Ghidaoui MS (2009) Investigations of the effects of coral reefs on coastal wave propagation by model simulations. In: Proceedings of the 33rd IAHR Congress – Water Engineering for a Sustainable Environment, Vancouver, 9–14 August
Lowe RJ, Falter JL, Bandet MD, Pawlak G, Atkinson MJ, Monismith SG, Koseff JR (2005) Spectral wave dissipation over a barrier reef. J Geophys Res 110:C04001. doi:10.1029/2004JC002711
Lugo-Fernandez A, Roberts HH, Suhayda JN (1998) Wave transformations across a Caribbean fringing-barrier coral reef. Cont Shelf Res 18:1099–1124
Lynett PJ (2007) Effect of a shallow water obstruction on long wave runup and overland flow velocity. J Waterw Port Coast Ocean Eng 133(6):455–462
Marris E (2005) Tsunami damage was enhanced by coral theft. Nature 436:1071
McAdoo BG, Dengler L, Prasetya G, Titov V (2006) How an oral history saved thousands on Indonesia’s Simeulue Island during the December 2004 and March 2005 tsunamis. Earthq Spectra 22(3):661–669
Mohandie RK, Teng MH (2009) Numerical and experimental study on the effect of coral reef and beach vegetation on reduction of long wave run-up. American Geophysical Union, Fall Meeting Abstract NH31B-1115
Nott J (1997) Extremely high-energy wave deposits inside the Great Barrier Reef, Australia: determining the cause – tsunami or tropical cyclone. Mar Geol 141:193–207
Okal EA, Fritz HM, Synolakis CE, Borrero JC, Weiss R, Lynett PJ, Titov VV, Foteinis S, Jaffe BE, Liu PL-F, Chan I-C (2010) Field survey of the Samoa tsunami of 29 September 2009. Seismol Res Lett 81(4):577–591
Orcutt JA, Committee on the Review of the Tsunami Warning and Forecast System and Overview of the Nation’s Tsunami Preparedness, National Research Council (2011) Tsunami warning and preparedness: an assessment of the U.S. tsunami program and the nation’s preparedness efforts. The National Academies Press, Washington, DC, 296 p
Phillips MR, Jones AL (2006) Erosion and tourism infrastructures in the coastal zone: problems, consequences and management. Tour Manag 27(3):517–524
Prasetya GS, Healy TR, Lange (de) WP, Black KP (2008) Extreme tsunami run up and inundation flows at Banda Aceh, Indonesia: are there any solutions to this type of coastal disaster? In: Proceedings of the Solutions to Coastal Disasters Congress, Turtle Bay, Oahu, 13–16 Apr 2008. American Society of Civil Engineers, ISBN: 978-0-7844-0978-7
Rahman HA (2012) Community and tsunami disaster. Proceeding of the international conference on environment science and engineering, IPCBEE, 32. IACSIT Press, Singapore, http://www.ipcbee.com/vol32/029-ICESE2012-D30015.pdf
Roeber V, Cheung KF (2012) Boussinesq-type model for energetic breaking waves in fringing reef environments. Coast Eng 70:1–20
Roeber V, Yamazaki Y, Cheung KF (2010) Resonance and impact of the 2009 Samoa tsunami around Tutuila, American Samoa. Geophys Res Lett 37:L21604. doi:10.1029/2010GL044419
Rosman JH, Hench JL (2011) A framework for understanding drag parameterizations for coral reefs. J Geophys Res 116:C08025. doi:10.1029/2010JC006892
Sale PF (2011) Our dying planet. An ecologist’s view of the crisis we face. University of California Press, Berkeley
Schleupner C (2005) Evaluation of coastal squeeze and beach reduction and its consequences for the Caribbean island Martinique. Working paper FNU-72, Research Unit Sustainability and Global Change, Hamburg University, 25 p. http://www.fnu.zmaw.de/fileadmin/fnu-files/publication/working-papers/Evaluation_of_coastal_squeeze_and_beach_reduction.pdf
SDMRI Report (2005) Report on the rapid assessment of status of corals in Gulf of Mannar after tsunami. http://www.reefcheck.org/PDFs/reports/India%202005.pdf
Smithers SG, Hopley D, Parnell KE (2006) Fringing and nearshore coral reefs of the Great Barrier Reef: episodic Holocene development and future prospects. J Coast Res 22(1):175–187
Stimpson I (2011) Japan’s Tohoku earthquake and tsunami. Geol Today 27(3):96–98. doi:10.1111/j.1365-2451. 2011.00793.x
Tanaka N (2009) Vegetation bioshields for tsunami mitigation: review of effectiveness, limitations, construction, and sustainable management. Landsc Ecol Eng 5(1):71–79
Valiela I, Bowen JL, York JK (2001) Mangrove forests: one of the world’s threatened major tropical environments. Bioscience 51(10):807–815
Valiela I (2006) Global coastal change. Blackwell Publishing, Oxford
Valiela I, Kinney E, Culbertson J, Peacock E, Smith S (2009) Global losses of mangroves and salt marshes. In: Duarte CM (ed) Global loss of coastal habitats: magnitudes, causes and consequences. Fundacion BBVA, Madrid
Venturato AJ, Titov VV, Mofjeld H, Gonzalez FI (2004) NOAA TIME Eastern Strait of Juan de Fuca, Washington, Mapping project: procedures, data sources, and products. NOAA Technical Memorandum OAR PMEL-127, contribution 2713, 26 p. http://www.pmel.noaa.gov/pubs/PDF/vent2713/vent2713.pdf
Vuren (van) S, Kok M, Jorissen RE (2004) Coastal defence and societal activities in the coastal zone: compatible or conflicting interests? J Coast Res 20(2):550–561
Wilkinson C, Souter D (eds) (2005) Status of Caribbean coral reefs after bleaching and hurricanes in 2005, Global Coral Reef Monitoring Network/Reef and Rainforest Research Centre, Townsville 152 p., 85–103
Wilkinson CR (1999) Global and local threats to coral reef functioning and existence: review and predictions. Mar Freshw Res 50(8):867–878
Wu F-C, Shen HW, Chou Y-J (1999) Variation of roughness coefficients for unsubmerged and submerged vegetation. J Hydraul Eng 125:934–942
Yanagisawa H, Koshimura S, Goto K, Miyagi T, Imamura F, Ruangrassamee A, Tanavud C (2009) The reduction effects of mangrove forest on a tsunami based on field surveys at Pakarang Cape, Thailand, and numerical analysis. Estuar Coast Shelf S 81:27–37
Young IR, Hardy TA (1993) Measurement and modelling of tropical cyclone waves in the Great Barrier Reef. Coral Reefs 12:85–95
Zaytsev AI, Kovalev DP, Kurkin AA, Levin BV, Pelinovsky EN, Chernov AG, Yalciner A (2009) The tsunami on Sakhalin on August 2, 2007: Mareograph evidence and numerical simulation. Russ J Pac Geol 3(5):437–442. doi:10.1134/S1819714009050054
Acknowledgements
The authors would like to thank Ahmet Yalciner (METU, Turkey) for sharing NAMI-DANCE software. They also thank anonymous referees for constructive comments.
This work has been funded by the European INTERREG IV TSUNAHOULE Project which aims at determining tsunami and waves hazard principally for the French Caribbean Islands and neighboring islands.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2014 Springer Science+Business Media Dordrecht
About this chapter
Cite this chapter
Roger, J., Dudon, B., Krien, Y., Zahibo, N. (2014). Discussion About Tsunami Interaction with Fringing Coral Reef. In: Kontar, Y., Santiago-Fandiño, V., Takahashi, T. (eds) Tsunami Events and Lessons Learned. Advances in Natural and Technological Hazards Research, vol 35. Springer, Dordrecht. https://doi.org/10.1007/978-94-007-7269-4_8
Download citation
DOI: https://doi.org/10.1007/978-94-007-7269-4_8
Published:
Publisher Name: Springer, Dordrecht
Print ISBN: 978-94-007-7268-7
Online ISBN: 978-94-007-7269-4
eBook Packages: Earth and Environmental ScienceEarth and Environmental Science (R0)