
Abstract
Site-specific control of the seed-density can rely on maps of soil texture. The seed-density should rise from sand to silt and loam and fall again towards clay. In this way either the yields can be increased or seeds can be saved.
For the sowing depth, the site-specific control should be based either on texture or on water content of the soil. In regions with maritime climate and consequently frequent rain, the control via soil texture seems reasonable. This could be realized by using texture maps and adjusting the depth of openers on-the-go by means of ultrasonic distance sensing.
In areas with continental climate and thus longer dry spells, a control based on the water content of the soil is a good choice. Here a soil moisture seeking control system that adjusts the sowing depth on-the-go to the drying front in the soil via infrared reflectance- or electrical resistance seems reasonable.
A special challenge is the increasing conflict between no-till with crop residues on the surface and sowing techniques. The trend to smaller row widths in order to realize yield increases adds to this conflict. But there are concepts available that can cope with this conflict. These are dealt with.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
8.1 Seed-Rate or Seed-Density
Site-specific sowing has several objectives. A dominant objective is the control of the seed-rate or instead of it the seed-density. The former is defined in kg per ha, the latter in the number of seeds per unit area. Important is also the spatial placement of the seeds in the field. This has to do with two objectives: the seed distribution over the area and the sowing depth . All these objectives depend heavily not only on the respective crops, but on the seeding methods employed as well.
Different crops, soils and climates necessitate a very wide range of seed-densities (Fig. 8.1). The seeding methods depend largely on the respective seed density. Precision drilling – targeted placing of every individual seed – can only be realized for crops with rather low seed densities because of the costs. For crops with high seed-densities – such as small grains, grasses, clover and alfalfa – it still is indispensable to practice bulk-drilling.

Conditions for seeding methods (Heege and Billot 1999)
However, adjusting machines for bulk-drilling via the seed-rate or seed-mass in kg per ha should be replaced by a control that is oriented directly at the required number of seeds per unit area, the seed density. Because it is this number and the field emergence that define the plant density per unit area. Therefore, the aim should be online and on-the-go control based on sensing the number of seeds that pass through the seed tubes.
The traditional adjustment of the seed-mass in kg per ha with bulk-drilling can cause substantial deviations from the number of seeds per unit area. These deviations can arise from varying slip of the driving wheel within a field due to firm- or soft ground as well as dry- or moist soil. Deficiencies can be due to the varying bulk density of the seeds, since these drills are designed for bulk- or volume metering. And the bulk density changes with the species, the variety, the provenance, and because of vibrations in the hopper, which influence the settling of the seeds. Finally, rather large deficiencies can arise from the varying average mass per seed. With European wheat varieties, the mean mass per seed fluctuates between 40 and 55 mg. All these deficiencies can be overcome by a reliable method of closed loop control of the seed numbers per unit area. For this, sensing the number of seeds that are passing through the seed tube is necessary.
Such a control of the seed density via optical sensors – which act as seed counters – is state of the art with precision drilling. With these drills, sensing the seeds is facilitated because the distances between the falling seeds are rather even. Usually, the coefficient of variation for these distances with precision drills is only about 10–20 %.
With bulk-drilling, the corresponding distances of the seeds at the end of the seed tube are very uneven because of more gaps as well as of seed clusters. The mean coefficient of variation for the seed distances is 100 %. Sensing the number of seeds online and on- the-go therefore is more difficult. But it is possible, at least for small grains. It is necessary to adapt the seed sensing technique to the irregular seed sequences. This adaptation can be done by either compensating for the seeds that were not recorded as a result of clusters by a computer program (Feldhaus 1997; Heege and Feldhaus 2002) or alternatively by more elaborate optical sensors for the seed counting (Müller et al. 1994, 1997). For an online and on-the-go control of the seed-density it is necessary to supply the control computer with data about the site-specific implement speed as well (Fig. 8.2).

Closed loop control of the seed density of small grains by means of seed counting (Heege and Feldhaus 2002)
8.1.1 Site-Specific Control of Seed-Density
The seed-densities for crops as listed in Fig. 8.1 vary within a wide span. The range indicated for e.g. small grains goes from 150 up to 400 seeds per m2. Several parameters bring about this wide range, such as species, variety, sowing time, water supply of the crop and soil texture. In rain-fed areas, it is only soil texture, which lends itself to site-specific control within individual fields.
All other parameters mentioned above usually do vary from field to field within a farm and therefore need attention on this basis. But they can be regarded as being constant within individual fields with present day farming techniques. On the basis of these parameters, therefore, site-specific control within individual fields does not make sense
The influence of soil texture and precipitation on the seed-rate needed for a high yield of winter wheat is shown in Fig. 8.3 via a factor, by which the respective seed-density is multiplied. With a low annual precipitation, a smaller seed-density suffices. Because the water supply does not support a dense and lush crop. However, the seed-density needed rises up only to an annual precipitation of 700–800 mm. Beyond a precipitation of 1,000–1,100 mm it drops again. This may be due to the fact that wet soils provide a higher emergence and thus might save seeds.

Factor for seed-density of winter-wheat depending on soil texture and precipitation for flat fields and a mean annual temperature of 8 °C (From Wiesehoff 2005, altered)
But as shown in Fig. 8.3, the influence of soil texture is more distinct than the effect of precipitation. Silty- or loamy soils always should be provided with higher seed-densities than sandy- or clay soils. This too probably can be explained by the fact that these soils supply plants more evenly during the growing season with water than sandy- or clay soils do and therefore are better able to support a dense crop.
Site-specific control of the seed-density on the basis of the annual variation of precipitation does not make sense, since knowledge about the supply of parts within the field in rain-fed areas does not exist a priori. But data about the site-specific soil electrical conductivity as a substitute of texture can rather easily be recorded, georeferenced and mapped with present day sensor technology (Sect. 5.2.1). Whether as an alternative also site-specific sensing of texture based on infrared reflectance will become feasible, is not clear (Sect. 5.3). Whatever method will be preferred, because practically these soil properties do not vary temporally, any maps generated can be used for several decades as a basis for on-the-go control of seed-density. Since fields with varying soil texture are common in many parts of the world, a substantial gain in sowing precision could be obtained if differences in the soil texture were taken care of in this way.
Crop plasticity is often mentioned as an argument against a need for site-specific control of seed-density. This feature is based on the ability of individual plants of a crop to act on inaccuracies in the local seed-rate as well as in the seed distribution over the area by either compensatory- or vice versa restricted growth. Within limits, the effect is such that the spatial growth of the plants automatically adjusts itself to the space available. Especially with small grains, the plasticity of a crop can be remarkable due to a matched development of lateral plant branches by tillering.
The result of a high crop plasticity is that the relation between seed-density and yield presents itself as a rather flat curve. This means that the effect of a more precise seed-density on the yield is rather small. However, at the same time this implies that more targeted sowing can result in substantial savings of seed costs. So the benefit of site-specific seed-density control just shifts from yields to seed costs. With crops that have a low plasticity – e.g. beans, sugar beets or potatoes – it is vice versa (Fig. 8.4)

Influence of seed-density on yield depends on crop plasticity (schematic curves)
Having in mind that besides crop plasticity the actual differences in soil texture within fields will influence the benefits achieved from site-specific control of the seed-density, it must be expected that results from field experiments will vary greatly. Schneider and Wagner (2005) presented a survey of results based on experiments with small cereals and maize from four different places in Germany. In all cases there were benefits from site-specific sowing, partly in savings of seed costs, but partly also from yield increases. The monetary value of these agronomic benefits – site-specific control costs not subtracted – was between 13 and 92 Euros per ha. In case an average agronomic monetary benefit of 50 Euros is assumed, it should easily be possible to cover the site-specific control costs from this.
8.2 Seed Distribution over the Area
Precision farming also implies precision in the seed distribution over the area. The area per seed is the product of row spacing and mean seed distance within the row. With all crops, presently row spacings are much wider than seed distances within the rows. For wheat – the most common crop on earth – a row spacing of about 12 cm and a mean seed distance within the row of only 2–3 cm are frequently used. Thus the plant distances perpendicular to the row directions are about five times the distances within the rows. The situation is similar with most other crops.
There are no indications that plants grow better when the distances to its nearest neighbours in the row direction are smaller than in the direction perpendicular to the rows. On the contrary, research at many places has shown, that ceteris paribus decreasing the row spacing and accordingly increasing the seed distances within the row improves growth of plants (Cox and Cherney 2011; Heege 1993; Heege and Billot 1999; Lambert and Lowenberg-DeBoer 2003; Neumann et al. 2006). Probably plant distances should be optimized irrespective of spacial direction. This means that for precision sown crops, ideally the plants should be arranged in the pattern of squares (row spacing equals mean seed distance within rows) or even better theoretically in the pattern of equilateral triangles (Heege 1967).
For bulk drilled crops, reducing the row spacing to the mean distance of seeds within the rows too would result in a very substantial improvement of the arrangement of plants. However, because of the irregular seed distances within rows, in this case the theoretical optimum in plant arrangement still would be not be obtained with a row spacing, which equals the mean seed distance within rows. The theoretical optimum for bulk drilling would be a row spacing that approaches zero, which is broadcasting (Heege 1967, 1970, 1993). Therefore, as far as the spatial seed arrangement with bulk sowing is concerned, broadcasting must be regarded as the best method. The problem is that not all sowing methods for broadcasting provide for a sufficiently even depth control of the seeds. And good depth control can be even more important than improvements in the seed distribution over the area. Yet both objectives – precision in the seed distribution over the area as well as an even depth – can be obtained by using wing-coulters. The seeds are broadcast within the empty space below the wings and the flattened soil underneath it.
Provided an adequate depth control is obtained, improvements in the seed distribution over the area can under ceteris paribus conditions (e.g. same seedrate per ha or seed density) result in
-
small increases in emergence of seeds
-
less weed growth
-
small increases in yield.
An effect of improvements in the seed distribution over the area on the emergence of seeds has been observed with closely spaced crops such as e.g. small grains (Mülle 1979; Mülle and Heege 1981). This probably can be explained by wider distances to nearest neighbouring seeds. For closely spaced crops, this reduces competition for growth factors that promote emergence, e.g. water.
Less weed growth with improved plant distribution over the area is the result of quicker canopy closing and hence faster shading of the soil.
The small increases in yield finally can be explained by a more even allocation of several growth factors such as light, water, air and mineral nutrients to plants. There is less light interception within the canopy, which promotes photosynthesis.
Yield responses of small grains, rape (colza) and beans to the seed distribution over the area are shown in Fig. 8.5. Similar responses to improvements in the seed distribution over the area have been reported for maize and soybeans (Lambert and Lowenberg-DeBoer 2003; Cox and Cherney 2011) as well as for cotton (Reddy et al. 2009).

Seed distribution over the area and yield. In all cases, the respective yield for drilling with 12 cm row-spacing is set to 100. Broadcast seeding is done by wing-coulters, which allow a similar precision in depth control as conventional openers for drilling. The seed-rates per ha are constant. For details see Heege 1993 or Heege and Billot 1999
However, there are reasons why in practice any changes in seed spacing towards more equidistant arrangements between neighbouring seeds irrespective of the direction are realized rather slowly.
For bulk drilled crops with a high seed density such as e.g. small grains, a decrease in opener spacing for drilling in narrower rows can present problems. Especially on fields that were not ploughed, clogging of crop residues or clods between adjacent openers can increase. This can impair the precision of the seeding depth and hence the emergence (Heege 1993). Hence again in this respect too both precise seed distribution over the area and accurate seeding depth must be observed. Furthermore, the expenses for sowing machines increase. And finally, with widely-spaced crops that are harvested by individual row units such as maize and soybeans, the expenses for harvesting machines too are higher.
8.3 Seeding Depth
A precise control of the seeding depth is important for a uniform emergence and development of all plants. This is in turn essential for treating all plants of a crop at the same growth stage with agrochemicals and thus for high yields.
Prerequisites for the germination of seeds are an adequate temperature, enough water and sufficient oxygen for respiration. The farmer can influence the temperature only by selecting the best time of the year. Control of water- and oxygen supply is possible via the seeding depth, which is a means to provide these factors in the best proportion.
An increase of the seeding depth generally improves the water supply for germination, since in most cases the water content of a soil rises with the distance from the surface. But the higher the water content, the lower is the oxygen supply, since the soil pores are either filled with water or air. A very high seeding depth hence can put the oxygen supply of seeds at risk.
The energy for the growth of seedlings before assimilation starts can only be provided by the seeds themselves. Hence, even after germination took place, too deep planting can result in either in no emergence or in weak plants arriving at the soil surface.
Thus low or uneven emergence can be the result of either a lack of water, a lack of oxygen or a lack of energy . Generally, due to the influence of the weather, controlling for an adequate supply of water is the main problem.
8.3.1 Control of the Seeding Depth
Commonly, the seeding depth depends either on the pressure that the free swinging drill coulters exert on the soil or alternatively on the height of spacers such as skids or wheels that are attached to the openers of heavier sowing units. The adjusting by means of the pressure is used only for some bulk-metering machines. An interesting strategy would be to adjust the depth of the coulters such that moist soil is attained.
8.3.1.1 Control via the Pressure Exerted on the Openers
With adjusting the pressure (Fig. 8.6), the seeding depth depends on the resistance of the soil. The higher the resistance of the soil, the lower the seeding depth is and vice versa. And since the resistance goes up with the speed, the seeding depth decreases with it. Hence the travel speed should be kept rather constant. However, controlling the pressure can also have advantages. On fields with uniform soil moisture but with varying soil resistance, the openers deposit the seeds deeper in loose soil than in more dense soil. This can be beneficial since the water transfer from the soil to the seeds is worse in loose soil. And for getting a sufficiently recompacted soil zone directly underneath the seeds (Fig. 7.11), deeper operation of the openers in loose soil is helpful too – as long as the energy of the seeds suffices for emergence.

Manual pressure control for a general-purpose drill (From Scarlett 2001, altered)
But the situation is opposite in case the moisture content varies within a field. Because the lower the moisture content, the higher the soil resistance is (Fig. 7.3). And consequently, the less deep the seeds are placed. This is contrary to the respective needs. So in summary, constant pressure can improve or impair the emergence.
8.3.1.2 Control via the Depth from the Soil Surface by Spacers
Controlling the depth of the openers from the soil surface by means of adjustable spacers – in most cases gauge wheels – does away with these influences. This method is state of the art with precision drills and is increasingly used with bulk-metering drills as well. For a precise depth control, the best location of the gauge wheels is as close as possible to the openers and lateral of them (Karayel and Özmerzi 2008; Morrison and Gerik 1985). The problem with depth control by gauge wheels is that their adjustment must be done manually on every row unit. This excludes site-specific depth control on-the-go, which is possible with pressure control.
A way out of this situation is a combination of pressure- and depth control, but without gauge wheels. Instead of using gauge wheels, the penetrating depth of the openers is sensed by ultrasonic sound waves, which are emitted by small sensors that are fixed to the arms of the openers. The time that the vertically oriented sound wave echos need to return to the sensors defines the distance of the opener arms above the ground and thus the actual seeding depth (Fig. 8.7).

This sensing technique for indicating and controlling the seeding depth on-the- go was developed by Dyck et al. (1985) and commercialized in Australia. Openers of air seeders with or without these ultrasonic sensors were tested at the Alberta Farm Machinery Research Centre (1994). The ultrasonic sensing resulted in much smaller differences between the intended and the finally measured seed depths. However, a continuous use of such seeding depth control by ultrasonic waves in commercial farm machinery did not occur. High prices for ultrasonic sensors in the past may have been responsible for this. But in the meantime these prices have dropped substantially as a result of mass production for backup-distance sensors used in automobiles as driver aids for parking. So it may be time to reconsider ultrasonic sensing of the seeding depth.
Kiani et al. (2010) used an experimental control device for automatic and online adjusting of seeding depths based on ultrasonic sensing in a similar manner as outlined in Fig. 8.7. The targeted seeding depths were attained with very high precision (r2 = 0.94 or even higher). However, this alone does not mean that ultrasonic control of seeding depths is ready for applications.
Precise sensing of the sowing depth with this technique implies an unimpeded access of the ultrasonic waves to a resting soil surface. Therefore, the waves should hit the soil well in advance of the opener front in order to prevent inaccuracies arising from soil in motion due to mechanical stirring. Bulky crop residues must be removed from the row area (see Sect. 8.4.1). Interference by clods must and can be taken care of by averaging of signals and by adjusting the response time. And finally, under very dry conditions, dust may influence the results.
But there are important advantages too. Control adjustments are possible on-the-go, which is a prerequisite for site-specific operations. And since the control devices need less space in the lateral direction than gauge wheels, realizing of seeding in narrow rows is facilitated.
The tests at the Alberta Agricultural Research Centre (1994) and by Kiani et al. (2010) were about the precise adjustment of sowing depth to preset constant numerical values for the field. But when it comes to site-specific control, the question is, on which criterion a varying seeding depth within a field should be based. Such a control could be oriented e.g. at the temperature, the texture, the organic matter or the water content of a soil. Sensing techniques for site-specific recording and mapping of these soil properties are available. However, what is reasonable?
It is well known that a specific temperature range is needed in the soil for every plant species for germination as well as for emergence. However, except for selecting the proper season of the year, predicting the soil temperature around the seeds for several days is hardly possible. Therefore, sensing the site-specific temperatures at the tip of an opener does not make sense. This would provide for the situation just at the time of seeding, not more. Varying weather can change the temperature within a short time.
Contrary to this, the texture as well as the organic matter content of a soil are constant on a time basis. In most cases, these factors are interrelated. Organic matter contents of soils tend to increase with the clay content. This means that a site-specific control oriented on the clay content or texture of a soil simultaneously includes differences in the organic matter content, at least to some extent. All site- specific recommendations that are based on clay content or texture probably intrinsically will do this.
Generally, it is recommended to increase the crop-specific seeding depth with decreasing clay- and hence with rising sand content of a soil. This holds especially for regions in continental climate. Yet the widely used control systems that keep the positions of the openers constant to the soil surface prevent a site-specific adaptation of the seeding depth in fields with varying soil texture. Ultrasonic distance sensors would allow to adjust the seeding depth on-the-go to the respective texture. The logical procedure for realizing such a control system would be starting with maps about the site-specific texture that was estimated from sensing electrical conductivities or perhaps infrared reflectances. These maps could then be used for many years as a base for a site- as well as a crop-specific seeding depth control via ultrasonic distance sensing.
However, the most important factor for an adequate control of the seeding depth probably is soil moisture. This is dealt with in the next section.
8.3.1.3 Control via Soil Moisture
In many cases, the moisture content rises with the vertical distance from the soil surface. The logical consequence of this would be to increase the seeding depth until the soil moisture needed is arrived at. This leads to a site-specific control of the depth of the openers that is based on sensing the soil moisture. The moisture levels, which are needed for various seed species for germination and emergence, are well known.
Such a depth control calls for a precise sensing of the water content in successive horizontal soil layers. Up to now, no sensing technique that is simply directed at the soil surface can do this. Yet scratching the soil surface by an opener so that the planes of different soil layers are accessible allows to sense the situation (Fig. 8.8).

Principle of moisture sensing at various depth levels below the soil surface by infrared reflectance (not to scale)
The sensing principles used for this rely either on the reflectance of near-infrared radiation (Price and Gaultney 1993; Mouazen et al. 2005) or on electrical resistance or -voltage (Carter and Chesson 1993; Bowers et al. 2006). Details on water sensing principles are dealt with in Chap. 5.
However, sensing the moisture at a predetermined level below the soil surface alone does not suffice. A moisture seeking control algorithm is needed, which automatically searches for the water content necessary by sensing at various depth levels while preventing unneeded deep placement of the seeds. Price and Gaultney (1993) developed such a control algorithm for maize.
The need for such a control system in rainfed regions probably depends very much on the climate. Its usefulness can be questioned for regions with a distinct maritime climate . Rather frequent drizzling rains here are the rule. Even if at the time of sowing the soil moisture at the normal seeding depth is not quite sufficient, the probability of some rain within a short time span is rather high. This also means that the concept of rising moisture with increasing depth below the soil surface – which relies on rather long time periods of evaporation into the atmosphere without rain – quite often is not valid here.
In regions with continental climate, the rain is less frequent, but instead when it occurs, it is heavier. And the periods without rain are longer. As a consequence, here the concept of rising moisture with increasing depth is more reliable. Hence probably it is not incidentally that the concept of “moisture seeking” started in regions with continental climate.
In areas where long dry spells frequently occur, the difference between germination on the one hand and emergence in the field on the other hand can get important. Seeds placed into a moist soil zone that is rather deep below the soil surface might germinate, but not generate an emerged seedling because of a long distance to the soil surface. Under these circumstances, seeding to moisture alone is not sufficient. It must be supplemented by seeding close enough to the surface. This obvious conflict of objectives can be sorted out by scraping aside some soil from the top along the seed row and thus creating a lower soil surface for emergence.
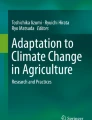
Figure 8.9 shows how – based on sensing of the drying front in a field – on the one hand seeding into moist soil and on the other hand a lowered soil surface for safe emergence can be obtained. The drying front within the vertical soil profile is where the water evaporates. Therefore, it is just beneath the top layer of dry soil, in which the water content is in balance with the relative humidity of the air. The vertical position of the drying front is sensed via the electrical resistance or voltage that exists between an insulated electrode at the tip of the drying front sensor (Fig. 8.9) and the seeding unit. Locating the drying front then allows to set the scraper in such a way that the air dry soil and in addition a thin layer of subjacent moist soil are swept into the inter-row area. The seeds thus are put into moist soil.

Schematic of experimental precision seeding unit with depth control based on the position of the drying front combined with a reduced seed cover. The final press wheel for closing the seed furrow is not shown. Details are no to scale (From Bowers et al. 2006, simplified and altered)
Site-specific control for such seeding according to a moisture seeking program and for a limited seeding depth is possible (Weatherly and Bowers 1997). Locating the drying front via electrical resistance or voltage can be realized with a high precision (Bowers et al. 2006; Carter and Chesson 1993). An adaequate sensor control results in deviations on either side of the drying front of not more than about 3 mm (Fig. 8.10). The air-dry soil is above the point, where the voltage decreases rapidly with depth.

Average voltages between two uninsulated electrodes that move horizontally in a sandy loam. The depths of the electrodes were varied so that drying fronts of the soil were crossed (From Bowers and Bowen 1975)
This concept of seeding depth control via sensing of the drying front and adapting the soil cover above the seeds seems to be a logical approach for regions with continental climate. But commercial use of this concept up to now is lacking. The same holds for comprehensive knowledge about scraping- and seeding depths that should be searched for by the control system. It should be borne in mind that contact sensing of resistance or voltage within a soil implies wear by abrasion, corrosion and collisions with stones for the tool.
Non contact sensing based on infrared radiation is less subjected to these wear factors. However, it is not known whether this method of sensing the moisture of successive soil layers allows for a similar precision.
8.4 Less Tillage, Crop Residues and Sowing Methods
There is a distinct conflict of objectives between precision of seed placement on the one hand and less cultivation on the other hand. Improvements in the seed distribution over the area as well as a high emergence are more difficult to obtain, when as a result of less cultivation, the residues of the previous crop remain on or near the soil surface.
Yet there are important points in favour of reduced- or even no-tillage:
-
substantial savings in the expenditure of energy and labour
-
less decomposition of soil organic matter
-
less or no moist soil is moved upwards to the surface, therefore less- or no artificial clod production occurs
-
crop residues on or near the soil surface can substantially reduce erosion, especially in areas with continental climate and on slopes.
However, some consequences of less or no tillage must also be dealt with:
-
hitherto mechanical weed control via soil cultivation must be compensated for by more herbicides. This holds especially for regions with maritime climate.
-
since less fungi on crop residues are buried, more fungicides must be used. This consequence too is more important in maritime regions.
-
the seeding techniques have to cope with crop residues on or near the soil surface.
As a result of more efficient herbicides and fungicides, counteracting to the consequences for weeds and fungi becomes easier and easier. Yet the conflict between seeding techniques and crop residues remains and must be taken care of. With conventional sowing techniques, the residues can seriously reduce the emergence. This can be the result either of less precise seeding depths or of residues that are placed close to seeds and hence impair the water transfer from the soil to the seeds. Several strategies to cope with these residue problems are available.
8.4.1 Vertical Discs, Cleaned Rows or Inter-Row Sowing
Openers that employ heavily loaded vertical discs often can solve the residue problem in dry regions with small grains or oil crops, when the soil is rather hard and the straw is brittle. Under these conditions, the discs just cut through the residues. In humid areas, this method often fails, since here the soil and the straw are more flexible. Therefore, the straw is not cut by the disc openers, but instead it is pushed into the seed furrow. This can seriously impair the emergence.
In maritime climates, the moist straw also tends more to hair-pinning around seeding devices and hence to clogging.
Sowing into cleaned rows relies on a local segregation of the respective areas for sowing and residues. Row cleaners accomplish this by moving the residues ahead of the openers into the inter-row areas. The implements used for this usually are vertical, ground-driven, fingered wheels, which are slightly slanted in the direction of travel as well as perpendicular to it (Fig. 8.11, left). The rotating fingers act like rotary rakes and push the residues sidewards. Depending on the depth of operation, also some strip cultivation (strip tillage) just ahead of the openers can result (Fig. 8.11, right). Site-specific depth control of the row-cleaner units via data from field maps (e.g. about soil texture or residues) is possible.

Field sown with maize after maize without any previous cultivation by using row cleaners in front of the seeding units (right). The insert (left) shows a row cleaner for site-specific depth control in front of a seeding unit (Courtesy of Yetter Mfg. Co. Inc., rearranged and altered)
Seeding into strips that are less loaded with residues can also be achieved by inter-row sowing . This method relies on placing the seeds in furrows that are located precisely between the stubble rows of the previous crop (Fig. 8.12). A prerequisite for this is that subsequent crops either have the same- or multiple row widths. Precise seed placement is obtained by using machinery guidance via a global positioning system with real-time kinematic corrections (RTK-GPS). The positioning control is arranged in such a way that year after year the rows of the previous crop can be located again at seeding time. An auto-steering function is set for seed placement precisely between the rows of the previous crop.

Inter-row sowing of wheat after wheat. The protection against soil erosion is evident (Courtesy of gps-Ag, Kangoroo Flat, Australia)
In case the field in not flat, it can be necessary to use a control system that is not solely based on the position of the tractor, because on side-hills or contours the implement can drift sidewards. To prevent inaccuracies resulting from this, the positioning control system has to auto-steer the implement as well. This is state of the art. The same seeding machine and the same track direction should be used year after year. Because this ensures that small inaccuracies in the lateral opener spacings occur subsequently in all crops and tracks in the same pattern and hence hardly affect the result. It is obvious that the best results with this method are obtained if the straw is harvested as well as the grain.
Inter-row sowing is used successfully in Australia for wheat, canola (rape) and lentils in no-till rotations with row spacings of 22 cm or more (McCallum 2007). A special advantage of this method is the lower incidence of the take-all fungal disease (Gaeumannomyces graminis) in cereal rotations. This probably can be explained by some spatial separation of the seedlings from infections on roots of the previous crop. And due to less straw being next to the emerged seedlings than with other no-till sowing methods, the efficacy of soil applied herbicides near the seedlings might be improved. This holds for the use of row-cleaners as well.
Yet inter-row sowing and row cleaning differ in their response to long stubbles. Inter-row sowing between long stubbles is no problem as long as the vertical clearance of the machinery allows for this. In contrast to this, row cleaners operate better in residues that are not attached to the soil any more. With long, bulky residues the best solution for work without interference can be using both inter-row sowing and row-cleaning (Fig. 8.11, right).
8.4.2 Seeding into Cover Crops
In humid areas, cover crops can provide for the preservation of soil fertility and for the suppression of weeds between the growing periods of main crops. Yet no-till sowing into fields with cover crops presents special problems. At seeding time, the cover crop might be still growing and might have a dense canopy. Therefore, inter-row sowing is not possible. And cover crops also complicate the use of row-cleaners, because the standing, dense residues easily get caught in the moving parts of the machines and thus cause clogging.
Torbert et al. (2007) developed an attachment to the front of row-cleaners of seeder units that pushes the standing, killed residues of cover crops in a forward and sideward direction. In this way they prevented clogging.
The use of roller-crimpers for coping with the clogging problem for no-till sowing into cover crops originated in Brazil, Argentina and Paraguay (Derpsch 1998; Kornecki et al. 2009). This method for sowing into cover crops relies on the concept that the position of the residue plants – that still are anchored to the soil – should be in the direction of travel of the seeding implements. No hair-pinning of residues on parts of the seeding implements can occur if the position of the stems and leaves is and remains exactly in the direction of travel. This condition is achieved by flattening out the cover crop on the soil via rolling and crimping precisely in the seeding direction (Fig. 8.13).

Roller-crimper in front of a tractor for no-till seeding into a cover crop. The metal strips on the roller drum crimp the stems. They should not cut or chop the stems (Courtesy of I & J Manufacturing, Gap, Pennsylvania)
Hence no residue parts are present, which are oriented at random and because of this can cause blocking. Since the plants still are fixed to the soil by their roots, by and large they remain in their place and are not taken along with the machinery. With tall cover crops, it is recommended to use row-cleaners in front of the seeding-units as well.
Since precise orientation of the flattened plants is very important, rolling and crimping cannot solve the problems for no-till seeding, if a cover crop lodges in several directions. However, with well managed cover crops this hardly occurs. So the roller-crimper technique provides new perspectives for no-till methods after cover crops.
However, the agronomic prerequisites of cover crops still remain. These are firstly the extra water supply for a crop instead of a fallow period within the rotation, and secondly the need to fit this crop into the seasonal schedules of the main crops. In areas that are short in water supply, the first prerequisite cannot be come up to. And if the second prerequisite – maintaining the seasonal schedules of the main crops within the rotation – cannot be met, yield losses with these can result. So seeding into cover crops still needs to be well adapted to the existing conditions.
8.4.3 Seeding and Loose Residue Sizes
Loose residues from the previous crop can affect the emergence in two ways
-
by deteriorating the precision of the sowing depth
-
by impeding the water transfer from the soil to the seeds.
The effect of both factors depends on sizes of loose residues.
It is well known that substantially reducing the sizes of loose crop residues can do away with clogging problems of sowing machines and hence provide for a precise sowing depth. Yet how is the water transfer from the soil to the seeds – and thus the germination and emergence – affected by a reduction of residue sizes and the location of residues within the soil? Figure 8.14 shows results to these questions for the interactions between rape (colza) seed and barley straw from laboratory experiments with two soils. The straw was either chopped, ground or left out completely.

Emergence of rape (colza) depending on the size reduction and the location of barley straw within soils from experiments in a laboratory (From Heege and Vosshenrich 2000)
The order of increasing emergence – with one exception – was straw mixed into the soil, straw on the top of the soil, no straw applied. The exception occurred with the loamy sandy soil and ground straw; for this combination the alternatives in straw placement hardly did matter. In all cases, grinding the straw instead of chopping it clearly improved the emergence. Similar results as with rape were obtained for small grains with the exception that the differences between the treatments were somewhat smaller.
In short, a distinct reduction of straw sizes during harvesting can help to solve residue problems. Utilizing this effect would necessitate to have grinders instead of choppers on combines and to increase their engine-power for doing this. An appealing prospect of this option would be that it allows to realize a good seed distribution over the area via small row widths with no-till of small grains and rape (colza) and thus to have the yield advantages associated with this (Fig. 8.5).
However, it should be pointed out that significantly smaller straw sizes would decrease the erosion control by residues. This effect would probably weigh heavily in regions with continental climate and susceptible soils, whereas in areas with maritime climate it probably can be neglected.
8.4.4 Seeding Underneath Undercutters
An alternative no-till sowing method that makes it possible to obtain a good seed distribution over the area for crops with a high seed density is sowing underneath the wings of undercutters (Collovati 2008). The operating principle is shown in Fig. 8.15.

Broadcasting seeds underneath a “Collovati” undercutter wing opener. The unfolded soil (right) falls back into place automatically. Fertilizer application in a line underneath the undercutter plane is optional (Courtesy of Tonutti Spa, Remanzacco, Italy)
The seeds can be broadcast over the whole area provided the lateral distance between the openers is set accordingly. As a result, the seed distribution over the area is even better than with narrow row drilling (see Sect. 8.2). Concerning the precision of the seeding depth, there is principally no difference between either wing-openers, disc-openers or shoe-openers (Heege and Billot 1999).
It should be noted that both ends of the undercutter wings are curved slightly upwards (Fig. 8.15). Because of this, the soil movement sidewards is restricted, instead the soil falls back in its original position (Vamerali et al. 2006). The front chisel and the wings do some mixing of loose residues on the surface with soil above the undercutter plane. Preceding cultivation does not improve the results with this opener; in case it incorporates residues into the soil, it might even cause blockages. In short, seeding underneath these undercutters is a no-till method.
References
Alberta Farm Machinery Research Centre (1994) Evaluation report 713. Kee Ultrasonic depth control system. Prairie Agricultural Machinery Institute, Humboldt, pp 1–10
Auernhammer H (1989) Electronics in tractors and machines (in German). BLV Verlagsgesellschaft, Munich
Bowers CG, Bowen HD (1975) Drying front sensing and signal evaluation for planters. Trans Am Soc Agric Eng 18(6):1051–1058
Bowers CG, Collins CA, Harris EP (2006) Low soil moisture planting of cotton for optimum emergence. Appl Eng Agric 22(6):801–808
Carter LM, Chesson JH (1993) A soil moisture seeking planter control. ASAE Winter Meeting, Chicago, Paper no. 931553
Collovati M (2008) Frustration led to new no-till opener design. No-Till Farmer, April 2008, pp 14–15. www.no-tillfarmer.com
Cox WJ, Cherney JH (2011) Growth and yield responses of soybean to row spacing and seeding rate. Agron J 103(1):123–128
Derpsch R (1998) Historical review of no-tillage cultivation of crops. In: Proceedings of the first JIRCAS seminar on soybean research, Iguassy Falls. Working report no. 13, pp 1–18
Dyck FB, Wu WK, Lesko R (1985) Automatic depth control for cultivators and air seeders developed under the AERD program. In: Proceedings of the Agri-Mation I. Conference and exhibition, 25–28 Feb 1985, St. Joseph, pp 265–277
Feldhaus B (1997) Seed counting and closed loop control for drills with volume-metering (in German). Doctoral thesis, University of Kiel, Kiel. Forschungsbericht Agrartechnik des Arbeitskreises Forschung und Lehre der Max Eyth Gesellschaft Agrartechnik im VDI, Nr. 302
Heege HJ (1967) Equidistant spacing-, drillling- and broadcast sowing of small cereals with spezial reference to the seed distribution over the area (in German). KTL-Berichte über Landtechnik 112, Helmut-Neureuter Verlag, München-Wolfratshausen
Heege HJ (1970) Seed distribution over the soil surface with with drilled and broadcast cereals (in German). Grundlagen der Landtechnik 20: 45 (in English: Translation No. 529 of the National Institute of Agricultural Engineering, Wrest Park, Silsoe, 1985)
Heege HJ (1993) Seeding methods performance for cereals, rape and beans. Trans Am Soc Agric Eng 36(3):653–661
Heege HJ, Billot JF (1999) Seeders and planters. In: Stout BA, Cheze B (eds) CIGR handbook of agricultural engineering, vol III. American Society of Agricultural Engineers, St. Joseph, pp 217–239
Heege HJ, Feldhaus B (2002) Site specific control of seed-numbers per unit area for grain drills. Agric Eng Int CIGR J. IV, PM 01 012. http://www.cigrjournal.org/index.php/Ejournal
Heege HJ, Vosshenrich HH (2000) Interactions between soil cultivation and climate. In: ISTRO 2000. 15th conference of the international soil tillage research organization, Fort Worth, 2–7 July 2000, Paper no. 73, pp 1–10
Karayel D, Özmerzi A (2008) Evaluation of three depth-control components on seed placement accuracy and emergence for a precision planter. Appl Eng Agric 24(3):271–276
Kiani S, Kamgar S, Racufat M (2010) Automatic online depth control of seeding units using a non-contacting ultrasonic sensor. In: XVIIth world congress of the international commision of agricultural and biosystems engineering, Quebec City, 13–17 June 2010
Kornecki TS, Raper RI, Arriaga FJ, Schwab EB, Bergtold JS (2009) Impact of rye rolling direction and different no-till row cleaners on cotton emergence and yield. Trans ASABE 52(2):383–391
Lambert DM, Lowenberg-DeBoer J (2003) Economic analysis of row spacing for corn and soybean. Agron J 95:564–573
McCallum M (2007) Inter-row sowing using 2 cm auto-steer. Research update. Australian Government. Grains Research and Development Corporation (GRDC). http://www.grdc.com.au/director/events/researchupdates?item_id=AC90061EB8AA0DAB16BE3008184EDB96&pageNumber=1
Morrison JE, Gerik TJ (1985) Planters depth control. Part I and part II. Trans ASAE 28(5):1415–1418 and 28(6):1745–1748
Mouazen AM, De Baerdemaker J, Ramon H (2005) Towards development of on-line soil moisture sensor using a fibre-type NIR spectrophotometer. Soil Till Res 80:171–183
Mülle G (1979) Research on precision seeding of small grains (in German). Doctoral dissertation, University of Bonn, Bonn. Forschungsbericht Agrartechnik der Max Eyth Gesellschaft 32:21
Mülle G, Heege HJ (1981) Seed spacing over the area and yield of grain (in German). J Agron Crop Sci 150:97–112
Müller J, Rodrigues G, Köller K (1994) Optoelectronic measurement system for evaluation of seed spacing. In: AGENG meeting, Milano, Report No. 94-D-053
Müller J, Kleinknecht C, Köller K (1997) Optosensor-recording seed distances with grain drills (in German and English). Landtechnik 52:76–77
Neumann H, Loges R, Taube F (2006) The wide row system – innovation for organic winter wheat cultivation? (in German). Ber Landwirtsch 84(3):404–423
Price RR, Gaultney LD (1993) Soil moisture sensor for predicting seed-planting depth. Trans Am Soc Agric Eng 36(6):1703–1719
Reddy KN, Burke IC, Boykin JC, Williford JR (2009) Narrow-row cotton production under irrigated and non-irrigated environment: plant population and lint yield. J Cotton Sci 13:48–55
Scarlett AJ (2001) Integrated control of agricultural tractors and implements: a review of potential opportunities relating to cultivation and crop establishment machinery. Comput Electron Agric 30:167–191
Schneider M, Wagner P (2005) Economic viability of precision farming with a whole farm approach (in German). In: Verbundprojekt preagro II. Zwischenbericht 2005: 278 http://www.preagro.de/
Torbert HA, Ingram JT, Prior SA (2007) Planter aid for heavy residue conservation tillage systems. Agron J 99:478–480
Vamerali T, Bertocco M, Sartori L (2006) Effects of a new wide-sweep opener for no-till planter on seed zone properties and root establishment in maize (Zea mays, L.): a comparison with double-disc opener. Soil Till Res 89:196–209
Weatherly ET, Bowers CG (1997) Automatic depth control of a seed planter based on soil drying front sensing. Trans Am Soc Agric Eng 40(2):295–305
Wiesehoff M (2005) Site-specific sowing of winter wheat (in German). Doctoral dissertation, University of Hohenheim, Hohenheim. Forschungsbericht Agrartechnik des Arbeitskreises Forschung und Lehre der Max Eyth-Gesellschaft im VDI 430:62
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2013 Springer Science+Business Media Dordrecht
About this chapter
Cite this chapter
Heege, H.J. (2013). Site-Specific Sowing. In: Heege, H. (eds) Precision in Crop Farming. Springer, Dordrecht. https://doi.org/10.1007/978-94-007-6760-7_8
Download citation
DOI: https://doi.org/10.1007/978-94-007-6760-7_8
Published:
Publisher Name: Springer, Dordrecht
Print ISBN: 978-94-007-6759-1
Online ISBN: 978-94-007-6760-7
eBook Packages: Biomedical and Life SciencesBiomedical and Life Sciences (R0)