
Abstract
Spatial and temporal variations in weed seedling distributions in arable fields are analysed. It is described how weed distributions can be assessed by manual grid sampling and by using sensor technologies from the near range. The potential for herbicide savings using site-specific weed management in different crops is calculated. Two different approaches for site-specific weed control are presented. First, an offline-approach based on georeferenced weed distribution maps and secondly a real-time approach combining sensor– and patch spraying technologies. The decision rules for patch spraying should take into account density, coverage and yield loss effects by weed species, its growth stages and costs of weed control. Herbicide savings using precision weed control varied from 20 to 70 %. Real-time patch spraying is the most economic treatment followed by map-based site-specific weed control. Uniform herbicide applications and uncontrolled treatments gave the lowest economic return. Several studies showed that weed species distribution remained stable over time when site-specific herbicide applications were realized based on economic weed thresholds.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
- Direct injection system
- Distribution
- Image analysis
- Mapping
- Multiple field sprayer
- Patches
- Shape features
- Site-specific control
10.1 Introduction
Weed seedling distribution changes spatially and temporally within agricultural fields. It often presents itself in aggregated patches of varying size or in stripes along the direction of cultivation (Marshall 1988; Gerhards et al. 1997; Christensen and Heisel 1998). The variation in weed seedling population has often been ignored for weed management decisions since techniques to assess the weed seedling distribution in acceptable time were not available. Many studies were conducted to apply post-emergence herbicides in winter wheat and maize based on georeferenced maps of the weed seedling distribution (Nordmeyer and Niemann 1992; Tian et al. 1999; Gerhards and Christensen 2003). Herbicide use with this map-based approach was reduced some 40–50 %. With a large within-field variation in weed occurrence, patch spraying that is based on the need for weed control reduces costs, herbicidal pollution of the environment and the risk of herbicide residues in the food chain (Dammer et al. 2003; Timmermann et al. 2003; Gerhards and Oebel 2006).
In many studies, weed species were grouped into grass weeds, annual broadleafs and perennial weeds. Perennials such as bindweed (Convolvulus arvensis) and thistle (Cirsium arvense) were found to be highly aggregated in arable crops with less than 20 % of the field being infested. Grass weeds covered on average 30–40 % of the fields at infestation levels higher than the economic thresholds and annual broadleaves between 20 and 90 % (Timmermann et al. 2003; Gerhards and Oebel 2006).
Site-specific weed management needs patch sprayers as well as automatic and real-time sensors for weed detection. The objective of this study is to describe the state-of-the-art and evaluate current patch spraying systems.
10.2 Weed Mapping
Weed seedling distribution in the field was usually assessed using discrete weed mapping or continuous-area sampling (Rew and Cousens 2001). In most studies, discrete weed mapping was applied in a regular sampling grid that was established in the field. The side length of the squared grid varied from a few meters up to approximately 50 m and depended on the width of the spray boom used for site-specific herbicide application. Density and/or coverage of emerged weed seedlings were counted and measured prior to and after post-emergence herbicide application in a sampling frame placed at all grid intersection points.
Efficacy of weed control was determined relating weed density after post-emergence herbicide application to prior herbicide application. Different mapping programs have been applied to characterize spatial distribution of weeds within fields. Maps differed based on the interpolation method that was applied, the area sampled and the distance between sampling points (Isaaks and Srivastava 1989; Johnson et al. 1995; Rew and Cousens 2001; Gerhards et al. 1997). Geostatistics and interpolation methods were applied to overcome the problem of discontinuities between adjacent sampling points that result from grid sampling. Interpolated weed maps were reclassified based on weed infestation levels (Gerhards et al. 1997). Most weed patches will be detected when sampling grids are not wider than 6 × 6 m (Gerhards and Oebel 2006).
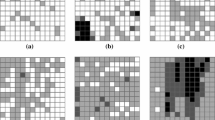
A weed treatment map was derived from the weed distribution maps using weed control thresholds to provide a decision rule for the patch sprayer (Fig. 10.1). Different methods to continuously record in-field variation of weed distributions were to surround and record the borders of aggregated patches of weed species such as wild oats (Avena fatua) using a data logger connected to a differential global positioning system (DGPS) (Colliver et al. 1996) or to map weed patches during harvest operations (Barroso et al. 2005).

Distribution of different weed species (a–c) in a 3 ha spring barley field in the year 2003 and application maps as a decision rule for the patch sprayer (d–f). Maps were created according to economic weed thresholds for all three weed species classes (Gerhards et al. 1997)
A major step towards a practical solution for site-specific weed management was the development of sensor technologies and of differential global positioning systems (DGPS) to automatically and continuously determine in-field variation of weed seedling populations. Airborne remote sensing was found to be capable for detection of high density weed patches of wild oats (Avena fatua L.) and of sterile oats (Avena sterilis ssp. ludoviciana Durieu) in wheat as well as of infestations of perennial weed species (Lamb and Brown 2001). However, weed seedling populations and weed infestations lower to or equal to the economic weed thresholds could only be detected with sensors from a low distance because of the limited spatial resolution of the sensors and the small area of weed seedlings. Many scientists therefore mounted the sensors on the tractor. Three groups of optical sensors have so far been applied for weed detections:
-
spectrometers
-
fluorescence sensors
-
digital cameras with subsequent image analysis.
10.2.1 Spectrometers
Intact green plants transform the incoming light by their chlorophyll pigments, which absorb mostly red as well as violet and blue light. Only some part of the green and most of the near-infrared light is reflected. The spectral reflectance of plants has a minimum in the visible wavelengths of about 650 nm and increases considerably towards the invisible near infrared above 700 nm (Fig. 10.2).

Reflectance curves for soil (filled dots) and for different plant species with the typical steep incline (red edge) between 680 and 750 nm wavelength (Weis and Sökefeld 2010)
The steep part of the curve is called the “red edge” (Guyot et al. 1992). Important properties of plants, such as chlorophyll content, leaf-area-index (LAI), biomass and water status, age, plant health levels can be derived from the position of the red edge (REP). The spectral curves of different plants have a similar nonlinear shape, but the soil curve in Fig. 10.2 is linear. The local extremes of the plant curves are within the green band (550 nm, maximum), the red band (660 nm, minimum) and near-infrared (750 nm, maximum) (Weis and Sökefeld 2010).
Vrindts and de Baerdemaeker (1997) as well as Biller (1998) used spectrometers to detect weeds between the crop rows or before sowing and after harvesting the crop by measuring the reflectance in the green, red and near-infrared light wave bands. Green leafs were characterised by a high reflectance in the green and near-infrared and a low reflectance in the red spectrum compared with the reflectance curve of bare soil. A few commercial products for weed control with optoelectronic equipment exist that use this spectral information; e.g. DetectSpray® (evaluated by Biller 1998) and WeedSeeker® (used by Sui et al. 2008).
10.2.2 Fluorescence Sensors
After exposing green plants with radiation for a specific amount of time, leafs emit radiation of a longer wavelength as the excitation light. The intensity of this radiation named fluorescence highly depends on the leaf properties and on the physiological state of plants (Cerovic et al. 1999).
UV-induced chlorophyll fluorescence has also been applied to discriminate plant species based on the characteristic leaf structure. Longchamps et al. (2010) measured a range of fluorescence spectra of maize, grass-weeds and broadleaved weeds under greenhouse conditions with natural illumination. They classified the three plant species groups based on their distinct spectral signatures with a recognition rate above 90 %. Tyystjärvi et al. (1999) developed a method called fluorescence fingerprinting with which leafs are exposed to a series of different spectra and intensities of light to record changes in the fluorescence of chlorophyll a. The emitted light curve could be used to identify plant species with an accuracy of more than 90 % under laboratory conditions. Later, Tyystjärvi et al. (2011) applied a similar approach under field condition and achieved 90 % recognition in maize and weeds when plants were shaded for 1 s before measuring.
In our working group, the MiniVeg® sensor (Fritzmeier Umwelttechnik) has been used in field and greenhouse studies to map the spatial distribution of weed species in arable crops. Red- plus far red fluorescence was induced by a red laser. When the laser hit plants, fluorescence was induced and recorded in the processor of the sensor. Due to the high frequency of measurements (500 s−1), plant density highly correlated with the number of hits. As crop density was rather homogeneous within the fields at early growth stages, variations of the hit-number correlated with the weed density. Therefore, weed distributions maps could be derived from the sensor measurements when a GPS-receiver was mounted on the sensor vehicle (Fig. 10.3). Blackgrass (Alopecurus myosuroides Huds.) was the dominant weed species in the winter wheat field sampled in 2008. Forty-four percent of the area remained untreated when site-specific weed control was applied in this field using a weed control threshold. The MiniVeg®-sensor provided 75 % correct decisions compared to manual weed countings.

Weed distribution maps derived from visual countings, bi-spectral imaging and MiniVeg® measurements in a 5.6 ha field at Ihinger Hof in winter wheat in autumn 2008. For details to bi-spectral imaging see the next section (After Gerhards et al. 2012)
10.2.3 Digital Image Analysis Based on Shape Features
10.2.3.1 The Sensing and Processing Concept
A very promising approach for weed detection and identification is a continuous ground-based detection method based on image analysis (Weis et al. 2008). With this method, weeds and crops are segmented from digital images in real-time using a bi-spectral camera system connected to DGPS. Weed species as well as crops are identified and counted based on automatic classification of shape features. The entire system for site-specific weed control consists of three parts, which are separated and can communicate via interfaces:
-
1.
A bi-spectral camera system with practical suitability for the field connected to DGPS.
-
2.
An image processing and classification component including a weed/crop-database used for the classification.
-
3.
A GPS-controlled patch sprayer.
First, laboratory studies were conduced to analyze reflection properties of green plants, different soils (organic, sandy, stony, wet, dry), stones and organic mulch using a video spectrometer (Fig. 10.4). The reflectance of all objects mentioned above within the field of view of the video spectrometer in the spectral band between 338 and 925 nm was visualized using grey levels from 0 (black) to 255 (white).

Video spectrometer image with typical reflections of a stone, weed and straw in the spectrum of 338–925 nm with soil as background (Sökefeld et al. 2007)
Figure 10.4 shows an image of a typical video spectrometer scene. Nearly over the entire analyzed spectrum, stones show a strong reflection. The reflection of dead organic material like straw is very similar to the reflection of stones. Living plants reflect moderately below 570 nm and have a strong reflection above 690 nm. The characteristic decrease of reflection between 610 and 690 nm is typical for green plants because of the absorption of this band by chlorophyll.
Based on these studies, it was concluded that a normalized difference between images above 700 nm and images between 610 and 690 nm would result in high quality images with a strong contrast between green plants and background. A bi-spectral camera was developed computing differential images of the infrared and red wavebands (Figs. 10.5 and 10.6). The resulting images were saved on the hard disc of a computer for further processing. The bi-spectral camera allows real-time detection and identification of weed species in arable crops. The speed of the image analysis is high enough to use the cameras for online weed control in combination with a field sprayer.

Principle of a bi-spectral camera system for the pixel congruent acquisition of two images in different spectral bands (Sökefeld et al. 2007)

Difference image (c) calculated from the infrared (b) and red image (a) to remove soil, stones and mulch; followed by binarization (d) using automatic thresholding (Sökefeld et al. 2007)
In the subsequent text, the processing of the data is dealt with in an abbreviated and condensed manner. Details to this are explained in the literature cited.
A circular closing operator of size five was used to connect most leafs of a single plant. For the extracted plants, various numerical features were computed that reflect the form of the plant species:
-
Region-based: these features are based on the region pixels, which are defined as a connected set of pixels. Examples are the size, compactness, minimum and maximum diameter and several statistical measures (statistical moments (Jähne 2001), Hu moments (Hu 1962))
-
Contour-based: these features were calculated from a contour representation of the region. Fourier descriptors and curvature scale space representation (CSS) were calculated (Mokhtarian et al. 1996).
-
Skeleton-based: the skeleton of a region is a “thinned” representation of the region (Soille 2003). Several numerical features as well as structural ones can be derived from the skeleton.
The skeleton is the “middle line” of the objects as shown in Fig. 10.7, center. A distance transform is computed for the leafs, assigning each pixel a value for the minimum distance to the border of the leaf (Fig. 10.7 right). All border pixels have the value one, all others inside the region get a higher value. The combination of the skeleton with the distance transform leads to a distance function that describes the “thickness” of the leaves. Statistical values (maximum, mean, variance, number of skeleton pixels) can be derived which were found to discriminate especially grasses from broadleafs.

Gray level image of an object with – from left to right – overlapping leafs, skeleton and distance transform (Weis and Gerhards 2007)
Every feature set, consisting of more than a 100 features, is associated with a class. The class assignments are determined from training sets of images. To be able to reuse the training sets, all training samples are stored in a database. The database contains the segmented images and the feature sets as well as the class assignments. A few examples of the images stored in the database are shown in Fig. 10.8.

Classification examples: each classified region denoted by a color and a number for the class. The latter is defined by a so-called EPPO code (Weis et al. 2008)
An image database was created for six crops (sugar beet, wheat, barley, maize, peas and oil seed rape) and 40 weed species. In the database, prototypes for the different classes are stored. The images are split up into segments each containing only one plant of known class. This allows the images to be re-used for the development of new feature extraction algorithms and classifiers. A comparison of different image segmentation approaches and feature sets can be achieved using the database.
10.2.3.2 Identification Results and the Classification of Plant Species
For the identification of weed species, a knowledge-based image analysis system was used (Gerhards and Oebel 2006; Oebel et al. 2004; Sökefeld and Gerhards 2004). First, shape features were extracted and calculated from all plants in the image. Those features were used to discriminate and classify plant species. In order to test the accuracy of the classification algorithm, images taken in the field were analyzed visually and by the image analysis system. Between 400 (maize) and 2,100 (winter wheat) images of unknown plants were taken for the testing. The automatic classification resulted in an average of about 90 % correct identification when weed species and crops were grouped into 4–5 classes. The results of the automatic classification in maize and winter wheat are presented in Tables 10.1 and 10.2. As must be expected, the identification in % depended on the plant species that were grouped together.
The classification results of the images and the corresponding GPS data were used for weed mapping and site-specific herbicide application. During the past 3 years, the camera system was used for weed identification in more than 100 ha of cereals, maize, sugar beet, rape-seed and peas. No problems with the camera technology arose due to vibration of the field vehicle, dust and moisture.
A different dataset was classified including images of four plant species groups: Winter barley (HORVU), grass-weeds (MOKOT), rape (Brassica napus BRSNN) and other broadleafs (DIKOT). Plant species groups that were in different growth stages are partly overlapped. This led to a high variation in the features (Fig. 10.9).

(left) Two dimensions of the feature space: skeleton mean and size; (right) the first two discriminant functions. The classes are: HORVU Hordeum vulgare, MOKOT grass weeds, BRSNN Brassica napus, DIKOT broad-leaved weeds (Weis and Gerhards 2007)
Approximately 40 different classifiers including Bayes functions, nearest neighbor, classification trees were applied to classify the dataset. All of them performed better than 95 % (correct classification rate) in a 10-fold cross validation. The main result of this test was that the type of classifier was less important than the selection of the right features and grouping of plant species into meaningful classes.
The shape based approach has problems in situations when the plants are in late growth stages and overlap each other. A proposal for the handling of these situations was made that uses a structural description for the separation of the objects into parts (Weis and Gerhards 2007).
10.3 Temporal and Spatial Dynamics of Weed Population
The temporal and spatial stability of weed populations are important for map based site-specific herbicide applications that take place in subsequent seasons of a rotation. Any pre-emergence site-specific applications rely on this, they would not be possible without some stability of weed populations between subsequent crops. Yet also post-emergence spraying in subsequent crops might be map based.
The actual dynamics of weed populations are influenced by the biological characteristics of weed species, by farming practices such as tillage, crop rotation, time of seeding, by harvesting competitiveness of the crop and direct weed control methods as well as by soil parameters (Mortensen et al. 1998; Nordmeyer and Niemann 1992; Timmermann et al. 2002). The major weed species have developed specific adaption- and survival strategies to persist in cropping systems (Radosevich et al. 1997). Those strategies include the production of a high number of seeds over a long period of time and seed dormancy (e.g. lambsquarter C. album). In addition, successful weed species have the capacity to survive under variable environments based on high phenotypic and genetic plasticity to invade new sites (e.g. velvetleaf Abutilon theophrasti). Many weeds are able to strongly compete for space, light, water and nutrients with the crops by high growth rates and efficiency in using water and nutrients. Several weeds produce mature seeds in a much shorter time than crops so that the seeds are spread long before a dense crop stand has been established (e.g. gallant soldier Galingsoga parviflora). Other weed species, such as thistle (Cirsium arvense) and quackgrass (Agropyron repens) have the ability to persist and spread via seeds and vegetative reproduction tissues. Those perennial weeds can emerge much faster than annual plants. These are only few reasons for spatial and temporal dynamics of weed populations.
Nordmeyer and Niemann (1992) found that blackgrass (Alopecurus myosuroides) populations mostly occurred at locations in the field where the clay content was relatively high. Timmermann et al. (2002) reported that the crop rotation had a long-term effect on weed density and weed species composition. In fields that had been planted with 50 % maize in the rotation more than 20 years ago, the density of lambsquarter (C. album) was still much higher than in fields with a high percentage of winter annual grains in the rotation. The crop rotation had also a very strong effect on the organic matter content. Fields that had been planted with potatoes were lower in the organic matter content than fields where mostly grains were planted. The difference in organic matter content again had a strong influence on the weed species composition. Catchweed (Galium aparine) predominantly occurred in fields with high organic matter contents (Timmermann et al. 2002).
Krohmann et al. (2002) studied the dynamics of weed seedling distribution over 5 years in a rotation of maize, sugar beet, winter wheat and winter barley and in continuous maize. They found that weed distribution maps obtained in maize and sugar beet were suitable for site-specific weed control in winter wheat and winter barley (Fig. 10.10).

Distribution of field violet (Viola arvensis) in maize, sugar beet, winter wheat and winter barley in a 5 ha arable field at Dikopshof Research Station near Bonn, Germany (Modified after Krohmann et al. 2002)
Ritter and Gerhards (2008) reported that populations of blackgrass (Alopecurus myosuroides) did not significantly change in density, location and size when site-specific weed control methods were applied over a period of 8 years in a rotation of winter annual cereals, maize and sugar beet. In all of the three fields studied, weed seedling distribution was heterogeneous. Density was higher in maize and sugar beet than in winter cereals. High density patches with densities higher than 25 plant per m2 consistently recur over the years at the same areas in the fields. Weed density reduction due to herbicides and other weed control methods was satisfying in each year indicating that site-specific weed control methods are sustainable for long-term weed suppression. Herbicide savings with blackgrass (A. myosuroides) ranged from 50 % in sugar beet to 75 % in winter barley.
Ritter and Gerhards (2008) also studied weed population dynamics of catchweed (Galium aparine) and blackgrass (A. myosuroides) under the influence of site-specific weed management. Most of the tested population parameters were weed density dependent. It was presumed that individual weeds without competition evolve better and produce more seeds, but this study showed opposing results. With increasing weed density, weed biomass and fecundity increased in this study (Figs. 10.11 and 10.12). All findings support that weed density has to be considered in weed management strategies.

Weed density and seed production of catchweed (Galium aparine) and blackgrass (Alopecurus myosuroides) in various crops (Ritter and Gerhards 2008)

Correlation of weed biomass and seed production of catchweed (Galium aparine) and blackgrass (Alopecurus myosuroides) over all crops (Ritter and Gerhards 2008)
An understanding of fundamental weed population biology would improve our ability to develop site-specific management decisions. Weed populations models have been applied to quantify the effects of site-specific weed management practices (Paice et al. 1997). However, the mechanism of weed patch stability is rather untapped. A few results show that efficacy of weed control methods (see Sect. 10.2, top) was lower in weed patches than at low density locations (Mortensen et al. 1998). Krohmann et al. (2002) found that the persistence of weed populations was also attributed to weed seedlings that emerged after weed control methods had been applied. Those individuals were able to produce viable seeds in maize and sugar beet but not in winter wheat and winter barley. The authors assume that competition of the crop was higher in winter annual grains and therefore late emerging weed seedlings were suppressed.
Few studies have attempted to quantify spatial stability of weed patches in agricultural fields. If weed patches were consistent in density and location over years, maps from 1 year could be used to direct sampling plans and to regulate weed control methods in subsequent years. Wilson and Brain (1991) found that the pattern of blackgrass (A. myosuroides Huds.) patches persisted during a 10 year study. Persistence of patches was attributed to the poor ability of blackgrass to colonize new locations when effective herbicides were applied. The pattern of patches was most stable in fields planted to cereals. Pester et al. (1995) observed significant stability for velvetleaf (Abutilon theophrasti) populations using Pearson, Spearman rank and chi-square correlation analysis to quantify year by year relationships between weed density at individual X, Y-coordinates of the sampling grid in four fields. Walter (1996) also used the chi-square correlation method and found that field violet (V. arvensis Murr.), common lambsquarters (C. album L.) and prostrate knotweed (Polygonum aviculare L.) distributions were stable in cereal grain fields over 3 years.
Gerhards et al. (1996) studied the spatial stability of velvetleaf (A. theophrasti Medik.), hemp dogbane (Apocynum cannabinum L.), common sunflower (Helianthus annuus L.), yellow foxtail (Setaria glauca L.) and green foxtail (Setaria viridis L.) over 4 years (1992–1995) in two fields in eastern Nebraska. The first field was planted to soybean in 1992 and corn in 1993, 1994 and 1995. The second field was planted to corn in 1992 and 1994 and soybean in 1993 and 1995. Weed density was sampled prior to post-emergence herbicide application at approximately 800 locations per year in each field on a regular 7 m grid. The same locations were sampled every year. Weed density at locations between the sample sites was determined by linear triangulation interpolation. Weed seedling distribution was significantly aggregated with large areas being weed free in both fields. Common sunflower, velvetleaf and hemp dogbane patches were very persistent in the east–west and north–south directions and in location as well as in area over the 4 years in the first field. Foxtail distribution and density continuously increased in each of the 4 years in the first field and decreased in the second field. A Geographic Information System was used to overlay maps from each year for a species. This showed that 36 % of the sampled area was free of common sunflower, 62.5 % was free of hemp dogbane and 11.5 % was free of velvetleaf in the first field, but only 1 % was free of velvetleaf in the second field. The persistence of broadleaf weed patches observed in this study suggests that weed seedling distributions mapped in 1 year are good predictors of future seedling distributions.
Heijting et al. (2007) found strong spatial correlations for cockspur (Echinochloa crus-galli), lambsquarter (C. album), goosefoot (C. polyspermum) and black nightshade (Solanum nigrum) in 3 years continuous maize cultivation. They attributed spatial and temporal stability of weed populations to their high recruitment capacity.
Summing up, it can be concluded that in many cases the weed maps from 1 year might provide the site-specific control basis for either pre-emergence or post-emergence herbicide applications in next years. So it might be reasonable to use the results of one sensing operation initially for an simultaneous in-season real-time application followed by map based site-specific sprayings in next crops.
10.4 Site-Specific Weed Control
The weed population can vary spatially as well as on a species basis. Precise application of herbicides thus has two objectives: adapting the mass to the spatial weed density as well as adjusting the formulation to the plant species. Hence site- and species-specific control might be needed.
For this purpose, a multiple field sprayer was developed (Fig. 10.13). Each of the three sprayer circuits led to a boom width of 21 m divided into 7 sections of 3 m. Each sprayer circuit and each boom section was turned on and off separately via solenoid valves. This sprayer allowed a separate control of each hydraulic circuit according to information from herbicide application maps. The application rate was regulated from 200 to 290 l ha−1 over the whole boom width of each circuit by pressure variation (Gerhards and Oebel 2006).

Schematic configuration of the multiple sprayer (Gerhards and Oebel 2006) with: 1 board computer with application map, 2 control unit for spray computer, 3 spray computer, 4 tanks, 5 manometers, 6 pressure valves, 7 pumps, 8 solenoid valves, 9 boom sections with nozzles
Another approach for site- and species specific weed control is to employ sprayers with an integrated direct injection system. With such injection sprayers, herbicides and carrier (water) are kept separate. According to the indications of the weed treatment map (off-line application) or the sensor data (on-line application), the herbicides are metered into the carrier and mixed immediately before entering the nozzles.
In both scenarios, short reaction times of less than 1 s and adequate mixing of the herbicides into the carrier are basic requirements for high weed control efficacy. Figure 10.14 shows an experimental direct injection system with one injection point for each boom section (3 m each). With this configuration, a lag time of 4–7 s was obtained. A shorter lag of approximately 1.0 s can be achieved by the injection of the herbicide at each nozzle.

Schematic view of the hydraulic system for the direct injection of herbicides (Sökefeld et al. 2005)
Site- and species specific weed control was performed in cereals, sugar beet, maize and oil-seed rape resulting in significant areas that remained untreated with herbicides (Table 10.3). Combinations of weed mapping and application technologies for site- and species specific weed control increased the potential for herbicide savings. From the results it is obvious that the herbicide savings can be considerably enhanced when the site-specific application is supplemented with species-specific spraying.
Efficacy of site-specific weed control (see Sect. 10.2, top) attained on the average 85–98 % and was similar to uniform herbicide applications.
Knowledge of spatial and temporal variability of weed populations offers large potentials for precise control methods and thus for using less herbicides resulting in less herbicide residues in the environment and food chain. Site-specific weed control methods can be realized when automatic sensor technologies for weed detection and patch spraying technologies are combined with precise decision algorithms.
In addition to this practical benefit, weed mapping helps to understand weed-crop interactions and population dynamics of weed species. It allows quantifying yield effects of different weed infestations in the fields and modelling the spatial and temporal variability of weed populations under different crop management systems.
10.5 Outlook and Perspectives
The potential of savings in herbicides by site-specific as well as by species-specific application is impressive (Table 10.3). The technical expenditures for this approach probably will be lower when – instead of expensive techniques for multiple spraying systems – concepts for direct injection will become state of the art (Figs. 10.13 and 10.14). Hence developments in this direction will be important.
Important will also be, whether the attempts of orienting herbicides at weeds or instead of this adapting crops to herbicides will prevail. The techniques dealt with so far in this chapter mainly aim for an orienting of herbicides at weeds, on a site-specific basis as well as species-directed. Yet the advances that have been made in adapting crops to herbicides are impressive as well. Genetically modified crops that are herbicide resistant are widely used in both North- and South America. They allow using singular and uniform chemical formulations of herbicides that in the past destroyed crops but effectively remove all weeds. Recent developments have proved that these herbicide resistant crops must not necessarily result from transgenic methods, for which there exist objections in the public of some European countries. These herbicide resistant crops can be developed by traditional breeding methods as well. The new “Clearfield” crop varieties verify this. However, one fundamental problem may arise with herbicide resistant crops. Their outgrowth can appear in subsequent crops of a rotation as weeds that cannot be removed by herbicides any more. This might be important especially with rape (colza).
And still another alternative should be considered, i.e. future weed control by small robots that might loiter through fields (Chap. 11, Fig. 11.6). These robots might remove weeds either by applying herbicides or by hoeing. It would be feasible to program the robots by precise georeferencing in such a way that they can differentiate between weeds and plants of the crop. This can be achieved by meticulously georeferencing all positions within a field, where the seeds were placed during the planting operation. This might not be feasible with small cereals or grass crops, yet it is possible with more widely spaced crops such as maize, beans and beets. In case of control by herbicides, the robots could by and large apply these only on weeds and leave out any deposition on plants of the respective crop. Hence there would be neither a need for herbicide resistant crops nor for selective herbicides. If the control is done by hoeing, this could include the removal of weeds that result from herbicide resistant outgrowth.
Actually, an intelligent combination of control techniques might be sensible. With herbicide resistant crops, any species-specific application can be put aside. But a site-specific application still might substantially save herbicides and reduce the impact on the environment. And with crops that are not resistant to herbicides, it might be wise to supplement the site- and species specific application as dealt with in the sections above with occasional or partial weed control by robots. Because it will hardly be possible to take into account all kinds of weeds in a species- specific application.
Anyway, the variety of feasible control techniques will largely allow to dispense with soil cultivation as a means for weed killing.
References
Barroso J, Ruiz D, Fernandez-Quintanilla C, Leguizamon ES, Hernaz P, Ribeiro A, Dias B, Maxwell BD, Rew LJ (2005) Comparison of different sampling methodologies for site-specific management of Avena sterilis. Weed Res 45:165–174
Biller RH (1998) Differentiating between plants and targeted application of herbicides (in German). Forschungs-Report 1:34
Cerovic ZG, Samson G, Morales F, Tremblay N, Moya I (1999) Ultraviolet-induced fluorescence for plant monitoring: present state and prospects. Agronomie 1:543–578
Christensen S, Heisel T (1998) Patch spraying using historical, manual and real-time monitoring of weeds in cereals. J Plant Dis Prot, Special Issue XVI:257–263
Colliver CT, Maxwell BD, Tyler DA, Roberts DW, Long DS (1996) Georeferencing wild oat infestations in small grains: accuracy and efficiency of three survey techniques. In: Roberts PC et al (eds) Proceedings of the 3rd international conference on precision agriculture, Minneapolis, pp 453–463
Dammer KH, Böttger H, Ehlert D (2003) Sensor-controlled variable rate application of herbicides and fungicides. Precis Agric 4:129–134
Gerhards R, Christensen S (2003) Real-time weed detection, decision making and patch spraying in maize, sugarbeet, winter wheat and winter barley. Weed Res 43:1–8
Gerhards R, Oebel H (2006) Practical experiences with a system for site-specific weed control in arable crops using real-time image analysis and GPS-controlled patch spraying. Weed Res 46:185–193
Gerhards R, Pester DY, Mortensen DA (1996) Characterizing spatial stability of weed populations using interpolated maps. Weed Sci 45:08–119
Gerhards R, Sökefeld M, Schulze-Lohne K, Mortensen DA, Kühbauch W (1997) Site specific weed control in winter wheat. J Agron Crop Sci 178:219–225
Gerhards R, Weis M, Gutjahr C, Schulz J, Jancker H (2012) Research on automatic weed recognition in crops via the sensor-system MiniVeg® (in German). In: ATB-Computer Bildanalyse in der Landwirtschaft, Workshop 2011, Universität Hohenheim-Ihinger Hof
Gutjahr C, Sökefeld M, Gerhards R (2012) Evaluation of two patch spraying systems in winter wheat and maize. Weed Res 52:510–519
Guyot G, Baret F, Jacquemoud S (1992) Imaging spectroscopy for vegetation studies. In: Toselli F, Bodechtel J (eds) Spectroscopy: fundamentals and prospective applications. Kluwer Academic Publishers, Dordrecht, pp 145–165
Heijting S, Van Der Werf W, Stein A, Kropff MJ (2007) Are weed patches stable in locations? Application of an explicitly two-dimensional methodology. Weed Res 47:381–395
Hu MK (1962) Visual pattern recognition by moment invariants. IRE T Inf Theory 8(2):179–187
Isaaks EH, Srivastava RM (1989) An introduction to applied geostatistics. Oxford University Press, New York, 561 p
Jähne B (2001) Digital image processing, 5th edn. Springer, Berlin
Johnson GA, Mortensen DA, Martin AR (1995) A simulation of herbicide use based on weed spatial distribution. Weed Res 35:197–205
Krohmann P, Timmermann C, Gerhards R, Kühbauch W (2002) Causes for persistence of weed populations (in German). J Plant Dis Prot, Special Issue XVIII:261–268
Lamb DW, Brown RB (2001) Remote sensing and mapping of weeds in crops. J Agric Eng Res 78:117–125
Longchamps L, Panneton B, Samson G, Leroux G, Thériault R (2010) Discrimination of corn, grasses and dicot weeds by their UV-induced fluorescence spectral signature. Precis Agric 11(2):181–197
Marshall EJP (1988) Field-scale estimates of grass populations in arable land. Weed Res 28:191–198
Mokhtarian F, Abbasi S, Kittler J (1996) Robust and efficient shape indexing through curvature scale space. In: Pycock D (ed) Proceedings of British Machine Vision Conference 1996, BMVC, British Machine Vision Association, Edinburgh, pp 53–62
Mortensen DA, Dieleman JA, Johnson GA (1998) Weed spatial variation and weed management. In: Hatfield JL, Buhler DD, Stewart BA (eds) Integrated weed and soil management. Ann Arbor Press, Chelsea, p 293
Nordmeyer H, Niemann P (1992) Possibilities of targeted site-specific application of herbicides based on weed distribution and soil variability (in German). J Plant Dis Prot, Special Issue XIII:539–547
Oebel H, Gerhards R, Beckers G, Dicke D, Sökefeld M, Lock R, Nabout A, Therbourg R-D (2004) Site-specific weed control by georeferenced image processing in an offline (and online) TURBO mode. First practical experiences (in German). J Plant Dis Prot, Special Issue XIX:459–465
Paice MER, Day W, Rew LJ, Howard A (1997) A simulation model for evaluating the concept of patch spraying. Weed Res 43:373–388
Pester DY, Mortensen DA, Gotway CA (1995) Statistical methods to quantify spatial stability of weed populations. North Cent Weed Sci Soc 50:52
Radosevich S, Holt J, Ghersa C (1997) Weed ecology – implication for weed management, 2nd edn. Wiley, New York, 589 p
Rew LJ, Cousens RD (2001) Spatial distribution of weeds in arable crops: are current sampling and analytical methods appropriate. Weed Res 41:1–18
Ritter C, Gerhards R (2008) Population dynamics of Galium aparine L. and A. myosuroides (Huds.) under the influence of site-specific weed management. J Plant Dis Prot, Special Issue XXI:209–214
Soille P (2003) Morphological image analysis, 2nd edn. Springer, Heidelberg
Sökefeld M, Gerhards R (2004) Automatic weed mapping by digital image processing. Landtechnik 59(3):154–155
Sökefeld M, Hloben P, Schulze Lammers P (2005) Development of test bench for measuring of lag time of direct nozzle injection systems for site-specific herbicide application. Agrartechnische Forschung 11(5):145–154
Sökefeld M, Gerhards R, Oebel H, Therburg RD (2007) Image acquisition for weed detection and identification by digital image analysis. In: Stafford J (ed) Precision agriculture ‘07, vol 6, The Netherlands. 6th European Conference on Precision Agriculture (ECPA). Wageningen Academic Publishers, Wageningen, pp 523–529
Sui R, Thomasson JA, Hanks J, Wooten J (2008) Ground-based sensing system for weed mapping in cotton. Comput Electron Agric 60:31–38
Tian L, Reid JF, Hummel JW (1999) Development of a precision sprayer for site-specific weed management. Trans ASAE 42(4):893–900
Timmermann C, Gerhards R, Kühbauch W (2002) Causes of yield differences with arable crops (in German). J Agron Crop Sci 187:1–9
Timmermann C, Gerhards R, Kühbauch W (2003) The economic impact of the site-specific weed control. Precis Agric 4:249–260
Tyystjärvi E, Koski A, Keränen M, Nevalainen O (1999) The Kautsky curve is a built-in barcode. Biophys J 77:1159–1167
Tyystjärvi E, Norremark M, Mattila H, Keranen M, Hakala-Yatkin M, Ottosen C (2011) Automatic identification of crop and weed species with chlorophyll fluorescence induction curves. Precis Agric 12:546–563
Vrindts E, de Baerdemaeker J (1997) Optical discrimination of crop, weed and soil for on-line weed detection. In: Stafford J (ed) Precision agriculture 1997, 1st European Conference on Precision Agriculture, vol 2, Technology, IT and Management. BIOS Scientific Publishers, Warwick, pp 537–544
Walter W (1996) Temporal and spatial stability of weeds. In: Brown H (ed) Proceedings of 2nd International Weed Congress, Copenhagen, Denmark, pp 125–130
Weis M, Gerhards R (2007) Feature extraction for the identification of weed species in digital images for the purpose of site-specific weed control. In: Stafford J (ed) Precision agriculture ‘07, vol 6, The Netherlands. 6th European Conference on Precision Agriculture (ECPA). Wageningen Academic Publishers, Wageningen, pp 537–545
Weis M, Sökefeld M (2010) Detection and identification of weeds. In: Oerke E-C, Gerhards R, Menz G, Sikora RA (eds) Precision crop protection – the challenge and use of heterogeneity. Springer, Dordrecht, pp 119–132
Weis M, Ritter C, Gutjahr C, Rueda-Ayala V, Gerhards R, Schölderle R (2008) Precision farming for weed management techniques. Gesunde Pflanzen 60:171–181
Wilson BJ, Brain P (1991) Long-term stability of distribution of Alopecurus myosuroides Huds. Within cereal fields. Weed Res 31:367–373
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2013 Springer Science+Business Media Dordrecht
About this chapter
Cite this chapter
Gerhards, R. (2013). Site-Specific Weed Control. In: Heege, H. (eds) Precision in Crop Farming. Springer, Dordrecht. https://doi.org/10.1007/978-94-007-6760-7_10
Download citation
DOI: https://doi.org/10.1007/978-94-007-6760-7_10
Published:
Publisher Name: Springer, Dordrecht
Print ISBN: 978-94-007-6759-1
Online ISBN: 978-94-007-6760-7
eBook Packages: Biomedical and Life SciencesBiomedical and Life Sciences (R0)