
Abstract
An indoor positioning technique based on the inertial measurement of the object and the received signal strength indicator (RSSI) measured from an active RFID tag placed on the object is presented. The inertial measurement complements the inaccuracy of the RSSI measurements, especially when the object is far away from RFID reader. Correspondingly, a strong RSSI reading when the object is near a RFID reader provides accurate information about the location of the object. This information could then be used to amend the position estimated from the inertial measurement. Experiment has shown that the proposed technique provides better positioning accuracy.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
1 Introduction
The ability to locate human or objects indoor could enable guided navigation, security services and other applications that suit the location of the human or objects to be provided. For example, real-time locator systems have been deployed at hospitals for tracking patients and the usage and location of expensive equipment [1]. In a museum, visitor positioning system has been used to stream related information to the visitor based on their current location [2].
Global Positioning System (GPS) is the most common positioning system used. However, GPS is limited to the outdoor environment where there is no barrier to the satellite signal. For indoor positioning, GPS has poor accuracy even with additional information from mobile phones network (Assisted-GPS). Moreover, GPS is essentially a 2D system and thus cannot tell which floor exactly an object is in a multi-storey building.
For indoor positioning system, the Radio Frequency Identification (RFID) technology is a promising technology due to its low cost, low power and no line-of-sight requirement [3–5]. Wi-Fi is also widely considered due to the availability of devices and Wi-Fi infrastructure [6]. Though this work uses the RFID technology, the proposed technique does not utilize features specific to RFID and therefore it could be extended to a Wi-Fi infrastructure.
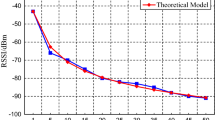
Most approaches to RFID and Wi-Fi positioning utilize the wireless radio signal strength, readily measured in the form of the Received Signal Strength Indicator (RSSI). Ideally, the signal strength should reduce logarithmically as the distance increases. However, RSSI is usually unrepresentative of the distance between transceivers especially in closed indoor environment due to radio multipath, absorption, diffraction and reflection. The further the radio signal travels, the more the signal strength-distance correlation diminishes. Figure 14.1 illustrates the relationship between RSSI and distance of Texas Instrument’s CC2530 RFID chipset which is used in this work. In this work, data from inertial measurement is used to make up for this inaccuracy.

Relationship between RSSI and distance for TI’s CC2530
1.1 Received Signal Strength Indicator
A typical RFID positioning system consists of known fixed-location RFID readers refer to as “nodes” which pick up the radio signal from RFID tag placed on the object to be tracked. The RSSI between the tag and nodes are then sent to a central server for processing to determine the position of the tag. Several notable techniques that use RSSI for determining position include:
-
a.
Trilateration
After approximating the distance of the tag from several fixed nodes (at least three), the absolute position of the tag is then calculated by trilateration [5]. The main drawback of this technique is that the accuracy is highly dependent on the erratic RSSI reading.
-
b.
Scene Analysis
The RSSI profile of the indoor area is measured prior to the deployment of the positioning technique; a process known as “fingerprinting”. Then, during the positioning process, the location is determined by matching the read RSSI value with the value in the profile. There are two notable approaches of this technique:
First, the Location Identification based on Dynamic Active RFID Calibration or Landmarc uses known additional fixed RFID tags as references [7, 8]. If the tracked RFID tag’s RSSI value is similar to that of the nearest fixed RFID tag’s than the tracked RFID tag is said to be of the same location as the fixed RFID tag. If the tracked RFID tag has similar RSSI value compare to multiple fixed RFID tags, then its location is taken as the weighted combination of these fixed tags. This approach mitigates the effect that the surrounding environment has on the RSSI as the fixed RFID tags are subjected to the same conditions as the tracked tag.
The second notable approach is by using Bayesian inference to mitigate the effect of the inaccurate RSSI reading. This is a probabilistic approach that estimates unknown states based on a mathematical model describing the process augmented by measurement which is usually noisy [9, 10]. In [9] Kalman filter has been proposed as a solution for this approach in an attempt to track item using RSSI value in Wi-Fi technology. In this work a human walking model has been developed and measurements were based on noisy RSSI, infrared and footswitches. This technique however, requires prior RSSI fingerprinting, careful formulation, extensive computation and its accuracy depends very much on the model, measurements and tuning of the filter gains.
-
c.
Proximity
This approach is developed mainly for robotics navigation, where a grid of RFID tags is fixed in the area to be tracked. A RFID reader is attached to the object to be tracked. The location of the object is determined when the attached reader reads the known location tags. The accuracy of the technique depends very much on the density of the tags deployed. It usually requires a huge number of RFID tags to be embedded at the area to be tracked thus incurring lengthy and costly site fitting.
1.2 Inertial Measurement
Inertial Measurement Unit (IMU) is a device capable of continuously computing the position, velocity and the orientation of an object. Unfortunately, IMU suffers from biases and drifts which grow over time [11, 12] and hence requires regular position and velocity updates to limit positioning errors. IMU is commonly used with GPS that provides the required updates for outdoor navigation applications.
2 Methodology
The proposed technique combines the inertial measurement obtained from the IMU with RSSI readings obtained from RFID readers. A RFID tag and an IMU are placed on the object to be tracked. RFID nodes are distributed sparsely at area of interest and each contains the coordinates of its respective location. Figure 14.2 shows the flow of the proposed technique. To simplify the demonstration of the technique, only two dimension positioning is considered. The interval is set at 1 s.

Proposed technique
The data output from the IMU are the linear accelerations and angular velocities. The distance travelled by the tracked object, D, at every time interval can be computed by double integrating the linear accelerations. Angular velocities are integrated to obtain the change in the direction at every interval. Since the initial direction is known from the previous interval, the new direction can be computed by using the equation:
where k is the time interval index and Δθ is the change in the angle of the direction. The position of the tracked object can now be estimated by using the equations below:
where X and Y denote the tracked object coordinates.
Next the estimated position has to be checked against the acceptable region based on the RSSI value of the tracked object. The RSSI values are categorized into three levels as shown as Fig. 14.1. Each level has a corresponding acceptable region with different distance radius. This does reduce the positioning resolution but at the same time the susceptibility towards erratic RSSI readings also diminishes.
If the estimated position of the tracked object falls within the acceptable region, then this position is accepted. If the estimated position is not in the acceptable region, the position will be shifted in the radial direction and finally repositioned at the mid-point between the inner and outer peripheries of the acceptable region. Figures 14.3 and 14.4 illustrate this.

Position 2 is accepted as it falls within the acceptable region

Position 2 is not accepted and is therefore being shifted radially to Position 3
3 Performance Evaluation
Experiment was carried out to test the performance of the proposed technique. RSSI readings were taken from Texas Instrument CC2530 chipset which supports 2.4 GHz IEEE 802.15.4 systems. Random errors were intentionally added into the inertial data to simulate accelerated biases and drifts. The test-bed of the experiment is L-shape corridor as depicted in Fig. 14.5.

Tracking performance of the proposed technique
From the figure, the proposed technique (denoted by the “Revised” line) tracks the actual position of the object more accurately than by just using the IMU alone. Note that when the object is in the region nearest to the node, the position estimated by the technique is always very close to the actual position. This demonstrates the ability of the technique to correct for IMU estimation error when the object is nearing the nodes. Figure 14.6 shows the standard deviation of the technique as compared to the use of IMU measurement only. From the figure, significant improvement has been made by the technique.

Standard deviation of the position error
4 Conclusion
The proposed technique improves the accuracy of RSSI-based indoor positioning. Categorizing the RSSI values into three levels reduces the impact of the erratic RSSI readings. The position estimation error accumulated over time by the IMU was corrected by the accurate RSSI reading when the RFID tag gets near to the nodes. The technique could be integrated onto a modern mobile device that has built in Wi-Fi, accelerometer and gyroscope.
References
Kim D-S, Kim J, Kim S-H, Yoo SK (2008) Design of RFID based the patient management and tracking system in hospital. In: 30th annual international conference of the IEEE Engineering in Medicine and Biology Society. Vancouver, pp 1459–1461
Tesoriero R, Gallud JA, Lozano M, Penichet VMR (2008) Using active and passive RFID technology to support indoor location-aware systems. IEEE Trans Consum Electron 54(2):578–583
Polito S, Biondo D, Iera A, Mattei M, Molinaro A (2007) Performance evaluation of active RFID location systems based on RF power measures. In: IEEE 18th international symposium on personal, indoor and mobile radio communications. Athens, pp 1–5
Bouet M, dos Santos AL (2008) RFID tags: positioning principles and localization techniques. 1st IFIP Wireless Days, pp 1–5
Blumenthal J, Grossmann R, Golatowski F, Timmermann D (2007) Weighted centroid localization in zigbee based sensor networks. In: IEEE international symposium on intelligent signal processing, pp 1–6
Ni L, Liu Y, Lau YC, Patil A (2003) LANDMARC: indoor location sensing using active RFID. In: Proceeding of the 1st IEEE international conference on pervasive computing and communications. Fort Worth, pp 407–415
Khan MA, Antiwal VK (2009) Location estimation technique using extended 3-D LANDMARC algorithm for passive RFID tag. In: IEEE international advance computing conference, pp 249–253
Errington AFC, Daku BLF, Prugger AF (2010) Initial position estimation using RFID tags: a least-squares approach. IEEE Trans Instrum Meas 59(11):2863–2869
Paul AS, Wan EA (2009) RSSI based indoor localization and tracking using sigma point Kalman smoothers. IEEE J Sel Top Signal Process 3(5):860–873
Fox V, Hightower J, Lin L, Schulz D, Borriello G (2003) Bayesian filtering for location estimation. IEEE Pervasive Comput 2(3):24–33
Li XR, Jilkov VP (2003) Survey of maneuvering target tracking. Part I. Dynamic models. IEEE Trans Aerosp Electron Syst 39(4):1333–1364
Sahinoglu Z, Gezici S, Guvenc I (2008) Ultra-wideband positioning systems: theoretical limits, ranging algorithms, and protocols. Cambridge University Press, New York
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2013 Springer Science+Business Media Dordrecht
About this chapter
Cite this chapter
Wong, W., Liew, L.S., Lai, C.H., Liu, L. (2013). Accurate Indoor Positioning Technique Using RSSI Assisted Inertial Measurement. In: Jung, HK., Kim, J., Sahama, T., Yang, CH. (eds) Future Information Communication Technology and Applications. Lecture Notes in Electrical Engineering, vol 235. Springer, Dordrecht. https://doi.org/10.1007/978-94-007-6516-0_14
Download citation
DOI: https://doi.org/10.1007/978-94-007-6516-0_14
Published:
Publisher Name: Springer, Dordrecht
Print ISBN: 978-94-007-6515-3
Online ISBN: 978-94-007-6516-0
eBook Packages: EngineeringEngineering (R0)