
Abstract
Sustainable management of natural resources requires a good understanding of ecosystems components and their interrelationships. Statistics is essential for understanding the structure and behaviour of ecological processes and provides the basis of predictive modelling. Mostly, physical, chemical, and biological variables are recorded across time and space. They serve as indicators, giving information concerning the state and changes of ecosystems. Most of monitored ecological indicators are non-stationary in time structure. The classical static statistical methods revealed the presence of trends and long memories in these data sets. On the other hand, modern dynamic statistical methods indicate the presence of long-term cycling processes. The Fourier polynomial is a technique for approximating periodic functions by sums of cosine and sine periodic functions, shifted and scaled. Therefore, it may be suitable for approximating cycling processes with a fixed frequency as portrayed by some ecological indicators. Wavelet analysis can be used to investigate the timescale behaviour of ecological processes. This analysis reveals the long-term evolution of an ecological indicator at different resolutions, the dominant scale of variability in the data set, and its correlation and cross-correlation with other ecological indicators on a scale by scale basis.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
1 Introduction
In the past, ecology has been changed from a descriptive to a more quantitative science using statistical methods. This development was supported by a lot of famous books where univariate and multivariate statistical methods were presented (Bliss, 1970; Patil, Pielou, & Waters, 1971; Pielou, 1977; Eason, Coles, & Gettinby, 1980, Legendre & Legendre, 1983; Ludwig & Reynolds, 1988). Due consideration is given to temporal and spatial changes to the input and state variables as well as to the ecosystem parameters and their initial uncertainties. The use of statistical methods is necessary to understand the basic temporal–spatial changes of physical, chemical, and biological components of an ecosystem, their functions with another, and their interrelationships with the ecosystem environment. From this, the following questions should be answered: Are there relationships between ecosystems and their environments? Are there interrelationships between different ecological processes under consideration? Are there dependencies of one or several ecological variables (or indicators) on one or several others, and how can they be modelled? Are there dependencies between groups of ecosystems or ecological objects? Necessary are those approaches to solve ecosystem management problems which are compatible with the stochastic nature of ecosystem variables or indicators and ecological processes under consideration. Statistical procedures will be the adequate mathematical methods as long as the processes within an ecosystem and/or the ecosystem describing differential equations are unknown.
In order to assess the quality of ecosystem services as well as ecosystem management and environmental policies, ecological variables and indicators are observed or recorded over time and space by short-term or long-term monitoring programs (Mateu & Montes, 2001; Haining, 2003). These variables give information on the current states, the changes, and trends of ecological processes. The patterns displayed by these variables can be captured and used for forecasting by means of appropriate statistical modelling techniques. Modelling of ecological time series gives more insight to the time varying behaviour and the internal time-dependent correlation structure of an ecosystem compared with classical univariate and multivariate statistics which is helpful in comparing of samples, sites of investigation, intrinsic characteristics of ecosystems and environmental factors, environmental standards, and comparisons of habitats and landscapes. The extraction of process information from ecological signals usually requires statistical modelling by removal of the non-stationary events and then fitting a stationary stochastic model. For this reason advanced time series techniques are useful as trend analysis, ARMA or ARIMA modelling or Fourier analysis, or for long-term data sets by wavelet analysis. The information extracted may also be helpful in estimating the weight of input and disturbance relating to the output variables of the model concerned as well as serve as a practical tool when appropriate initial values for estimation procedures are to be chosen.
2 Statistical Approaches for Analysing Ecological Data
Statistical methods are based on theory of probability. From the point of view of systems theory a distinction is made between two groups, depending on whether the variable time is included into ecosystem analysis or not. Static statistical methods (without consideration of time as a variable) cover simple and multiple linear and nonlinear regression and correlation, analysis of variance, cluster, discriminant, principal component, and factor analyses and estimation procedures (techniques of direct estimation such as least squares estimation, Markovian estimation, maximum likelihood estimation, Bayes’ estimation). A special position among the estimation techniques is held by the indirect techniques with which the time as a variable is included in evaluation by the sort of estimation procedure used (e.g. cusum technique, trend analysis). Another distinction can be made by recursive and non-recursive techniques (Aström, 1970). Dynamic statistical methods (with consideration of the variable time, also known as time series analysis) covers advanced procedures such as trend analysis, Fourier analysis, time correlation and spectral analysis, weighting and transfer functions, and wavelet analysis. These approaches have also become known under the notion of dynamic statistics. These techniques have usually become known in the literature by the name of time series analysis (Box, Jenkins, & Reinsel, 1994; Brockwell & Davis, 1998). They are standard techniques for statistical evaluation of results obtained also from sufficiently careful linearization of nonlinear systems.
2.1 Static Statistics
The question is asked if there is interdependence between two or more variables of an ecosystem. This question can be answered by a regression or correlation analysis depending on the purpose of the problem. The type of relationship between ecological variables or indicators is given by a regression equation, but the intensity of such a relationship is expressed by correlation measure.
2.1.1 Descriptive Statistics
Data series of ecosystem components collected by monitoring programs are extremely important for assessing the ecosystem state and developing an understanding of the interrelationships between the ecosystem components for ecosystem management. Data from monitoring programs contain errors that affect the results of statistical analysis and the quality of models developed (Pearson, 2005; Han & Kamber, 2006). This problem is more serious in high resolution data which usually contain missing data, outliers, and other impossible data as a result of sensor failure and external disturbances (Little & Rubin, 1987; Latini & Passerini, 2004). The errors cause not only difficulties in process identification and parameter estimation but also misinterpretations of spatial and temporal variations of ecological processes. Some classical techniques are aid in doing some preliminary checks and adjustments on ecological data series. Figure 8.1 shows the basic statistical approach for ecological data analysis (Young & Young, 1992). The left-hand part contains the record of raw data (measurements of water temperature from a shallow lake) based on a regular time grid. Outliers cannot be detected from such a record. In the right-hand part, the probability density distribution of these measurements is presented. It shows a two-modal density probability distribution.

Record (left) and probability density distribution (right) of water temperature data
For classical statistical procedures such as calculations of averages, variances, and correlations as well as computation of regression functions or other multivariate statistics all outliers have to be removed from the data record. The data set has to be homogenous.
2.1.2 Regression and Correlation
A regression analysis is required for problems in which stochastic dependencies (stochastic cause–effect relations) are to be described by functions, with one or several variables being specified as independent (Ludwig & Reynolds, 1988). Simple regression with one independent variable x and one dependent variable y may be linear or nonlinear. Nonlinear regressions are usually obtained by linearization (transformation of variables) and short-cut methods of computation. This approach can have negative effects on the quality of approximation. Estimation techniques give unbiased estimates. When none of the variables can be considered as dependent, methods as Bartlett’s best fit line or geometric mean are useful for statistical description. The method of geometric means is based on averaging the slopes of linear regressions \(y = f(x)\) and \(x = f(y)\), whereas Bartlett’s best fit line is founded on subsample estimates.
Multiple regression is characterised by one dependent, but several independent variables. It is usually linear because the possibilities of linearization are limited (Chatfield & Collins, 1989; Krzanowski, 1990). There are many situations in which polynomials of nth order are used to describe ecological processes or ecosystems (polynomial regression) by the equation \(y = a_0 + \Sigma a_{\textrm{i}} x^{\textrm{i}} \) for \(i = 1, \ldots ,n\). The highest occurring power n depicts the order of the polynomial. Whenever polynomials of higher order are used, there is a question of interpretability of variables in the ith power (see Table 8.1). There are meaningful physical interpretations of certain variables with powers up to the second-order maximum. In most cases, however, polynomials merely describe a relationship. For example, dissolved oxygen saturation \(= f(T_W )\) can be depicted as polynomial of the third order (Thomann & Mueller, 1987).
Substitution of the variables x i by sinus and cosinus functions will result in an equation of the form \(y = a + b_1 \sin x + b_2 \cos x\). This equation represents the simplest form of periodic regression or so-called Fourier polynomial. In an extended form this method is called Fourier analysis. This kind of regression is often used to determine a periodic trend, when time series of ecological indicators are analysed.
A correlation analysis is used to examine the tightness of correlations between two or more stochastic variable and to define the degree of stochastic interdependencies. This degree may be described by correlation coefficients. Bilateral and multilateral interdependencies are characterised by simple as well as partial and multiple correlation coefficients. A partial correlation coefficient is used also in the selection of those variables which influence an ecosystem. If multidimensional normal distribution is assumed, it is a measure of the linear dependence of two random variables, x j and x k, with elimination of the influence of all other random variables, \(x_1 , \ldots ,x_{j - 1} ,x_{j + 1} , \ldots ,x_{k - 1} ,x_{k + 1} , \ldots ,x_n\). The square of correlation coefficient is called performance index \(B = r^2 \). Its value is a measure for the variance explicable by means of regression.
2.1.3 Variance and Covariance Analyses
The variance analysis is a statistical method for qualitative and quantitative studies into the effects of one or several variables on results or measurements. The basic idea is that the total sum of squares of deviations of all single measurements from the total mean can be split into two parts: A within-data series sum of squares and a between-data series sum of squares. In models with fixed effects merely mean values of several random samples are usually compared with one another. However, in models with random effects the factor of influence themselves are treated as random samples from the set of possible occurrences of these factors. This may be the case with data continuously monitored.
A covariance analysis may be used in a quantitative investigation of various degrees of effects of one or several variables on experimental results, with the action of additional random variables (covariables) being compulsorily taken into due consideration. This method actually unifies variance and regression analysis (each related to models with fixed effects).
2.1.4 Cluster Analysis and Discriminant Analysis
Cluster analysis is used in ecology for many purposes such as determination of interrelations between trophic state variables (Brezonik & Shannon, 1971), detection of pollution sources in streams (Einax, Zwanziger, & Geiß, 1997), in population ecology (Schulze & Mooney, 1994), or in landscape ecology (Webster & Oliver, 1990). Cluster analysis can be considered as a pattern recognition method (Massart & Kaufman, 1983). This set of methods is also known by the notions numerical taxonomy or automatic classification. It encompasses a family of methods which are useful for finding structures within a set of ecological data monitored. Cluster algorithms are divided into hierarchical and non-hierarchical (partitioning) techniques. Hierarchical clustering can be carried out in an agglomerative or a divisive way. The agglomerative techniques join similar objects into clusters and new objects will be added to clusters already found or to join similar clusters. Divisive techniques start with one cluster comprising all objects. Then, the most inhomogeneous objects will be stripped step by step. They form one or more new clusters with more homogeneous objects on a lower level of linkage. Outputs of hierarchical cluster algorithms are represented by dendrograms. Non-hierarchical methods allow rearrangements of objects. They need initial information on the number of clusters to be obtained. The centroids of each cluster form initial gravity centres where the objects are attached to these centres by Euclidean distance. Then, after computation of the new centroids the objects can be rearranged.
Discriminant analysis may be applied to the separation or classification of ecological objects and their association with two or more collectives (groups, populations) (Green, 1978; Legendre & Legendre, 1983; McLachlan, 1992). Separation is undertaken through analysis of quantitative characteristics and reference to a separating function by means of which a decision is made on classification. Illustrative examples of how useful discriminant analysis is for ecological data are given by Ciecka, Fabian, and Merilatt (1980) for trophic state classifications of lakes and by Reckhow and Chapra (1983) for construction of phosphorus loading criteria and others.
2.1.5 Factor Analysis and Principal Component Analysis
Factor analysis is used to examine correlations between random variables for common causes, that are factors, and to reduce these correlations. Emphasis is laid, in this context, on point estimations of parameters. Methods of factor analysis and principal component analysis have been worked out in general ecology and phytocoenology of higher plants for typifying space and time relations of different species and environmental variables. Detailed descriptions and examples are given by Legendre and Legendre (1983), Joliffe (1986), Einax et al. (1997), Lepš and Šmilauer (2003).
2.1.6 Estimation Techniques
Generally, it is quite difficult to derive ecological process parameters from a real ecosystem. Therefore, they have to be estimated from observations of various variables and from their sample functions. These may be point or interval estimates depending on whether the parameter proper is searched for or the interval in which the parameter is contained. Such estimates are conveniently obtained by statistical computer packages (cf. BMDP, SPSS, STATGRAPHICS, STATISTICA, and others (Einax et al., 1997)). For the nonlinear estimation of (simple) functions several procedures are known (for example, Gauss–Seidel algorithm, Newton–Raphson algorithm, Marquart procedure, and other techniques). Table 8.2 contains some estimation procedures used for ecosystem parameter estimations.
To obtain an unknown parameter a on the basis of measured data and to estimate it, it is necessary to calculate value g of a defined estimate function G with the latter’s distribution depending on a. Value g is used for estimation of a and denoted â. Function G is defined as estimate function of the unknown parameter a. Estimation techniques based on least squares methods have worked particularly well in ecological contexts since a long time (e.g. Shastry, Fan, & Erickson, 1973; Beck, 1979). The direct techniques (regression, Markovian estimate, Bayes’ estimate, maximum likelihood estimate) estimate the parameters ‘in one step’ from a block of measured data at the input and output signals of a system. When these techniques are used, problems of application may rise up because of a priori information required on the system as a starting model. The indirect techniques are additionally subdivided into recursive and non-recursive procedures. Recursively organised procedures adjust a model of a given structure to the system in a stepwise manner, with any new set of measured data entailing another step of model adjustment. All parameters must be re-estimated throughout the procedure. The criterion by which to measure the quality of adjustment consists as non-parametrical procedures (e.g. Fourier analysis, correlation and spectral analyses), namely minimisation of a quality function Q by parameter vector â. The mean quadratic error, \(Q = \left\| e \right\|^2 \), and the simple quadratic error, \(Q = {\raise0.7ex\hbox{1} \mathord{\left/ {\vphantom {1 2}}\right.\kern-\nulldelimiterspace}\lower0.7ex\hbox{2}}\Sigma {\textrm{e}}_i^2 \) with \(e = (y_i - \tilde y_i )\) have been most commonly used as evaluation functions in statistical modelling.
The following two approaches to minimisation of Q have been proposed:
-
1.
\(\partial Q/\partial \hat{\textbf{\textit{a}}} = 0\). The estimation rule of normal regression \(\hat{\textbf{\textit a}}_k = \left( {\textbf{\textit x}^{\textrm{T}} _k \cdot \textbf{\textit x}_k } \right)^{ - 1} \textbf{\textit x}^{\textrm{T}} _k y_k\) is obtained for k observations.
-
2.
\(\partial Q/\partial \hat{\textbf{\textit{a}}} \to 0\). The estimation rule of recursive regression \(\hat{\textbf{\textit a}}_k = \hat {\textbf{\textit{a}}}_{k - 1} + {\textbf{\textit{K}}}_{k - 1} \left( {y_k - \textbf{{\textit{x}}}^T _k \hat a_{k - 1} } \right)\) is obtained for k observations.
Good approximation and updating of the model to the system are achieved by adequate choice of weighting factor K (gain factor). Exponential weighting has proved to be particularly suitable in this context. The intensity of weighting will substantially depend on the rates of parameter variation and on the extent of disturbances. These two influences must be given different weightings. Hence, optimum weighting will be achievable only as a compromise.
2.2 Dynamic Statistics
Two classical approaches namely the time and frequency domain methods are essential for understanding ecological processes and in most cases, they provide the basis for predictive modelling (Koopmans, 1985). In the time domain approach, values of signals recorded as a function of time are analysed by means of techniques such as autocorrelation function, partial autocorrelation function. But, these time domain methods give no information concerning the frequency at which the changes in the signal occur. Given that many natural systems have a frequency-dependent variability, an understanding of this frequency dependence gives more information concerning the underlying physical mechanism that produced the signal. The Fourier transformation can be used to project a signal from the time domain into the frequency domain so as to reveal periodic components present in the signal, the active frequency bands in the signal, and their intensity or relative importance (Bloomfield, 1976; Percival, 1995). Fourier approximation of ecological processes is based on a certain but fixed frequency (Hipel & McLeod, 1994). However, the recorded observations of many ecological indicators are an amalgam of components or processes operating at different timescales (corresponding to different ranges of frequencies active at specific time intervals in the Fourier domain) but cannot be revealed by classical signal analysis methods. In opposite of that wavelet analysis considers variations in time and scale (Chui, 1992).
2.2.1 Statistics of Time Domain
A sequence of observations collected overtime on a particular ecological indicator is called a time series. This can be composed of a quantity observed at discrete times, averaged over a time interval, or recorded continuously with time. From the point of view of information theory, these data series represent full process information. Within this context they are also called signals. Most of the signals are non-stationary, where the statistical properties like the variance and mean are functions of time. A signal is strictly stationary if it is free of trends, shifts, or periodicity. This implies that the statistical parameters of the signal such as the mean and variance remain constant through time. Otherwise, the signal is non-stationary. Ecological signals are usually non-stationary as a result of internal and external processes operating in parallel manner not only at different timescales but as well with different frequencies (Powell & Steele, 1995).
Extracting process information from the signals by classical methods usually requires modelling by the removal of the non-stationary and then fitting a stationary stochastic model. Information can be extracted by means of distinguished time series techniques. To detect nonstationarities in the data set the cumulative sum and trend analysis methods can be used. The cumulative sum method enables the analyst to recognize changes in the general tendency of a signal. It specifically enables one to detect changes occurring in the mean value of the signal, the time at which the change appears and the mean value at homogenous intervals (Pollock, 1999). Given a signal x(t) sampled at regular time intervals t, varying between 1 to N and a reference value r (for example the mean). This reference value is subtracted from all the estimations of the series, and then a cumulative sum of the successive values is calculated:
This cumulative sum is very sensitive to changes in the mean value of a signal. The advantage of the graphical plot of the values obtained is that all local mean is immediately deducted from the slope. Given two points X i and X j being the respective lower and upper limits of a relatively monotonous series, the slope p between these two values separated by K interval of time \(\left( {j - i = K} \right)\) will give \(P = \left( {X_j - X_i } \right)/K\) where
The local mean between the two distant points of K is equal to the slope of the graphic of the cumulative sum plus the chosen reference value r.
Figure 8.2 shows the time courses of a chemical water quality indicator of a freshwater ecosystem and its cusum line. It can be seen that the mean is an incorrect statistical measure to describe time-dependent changes of the indicator.

Detection of local changes of mean for water temperature (top), dissolved oxygen (middle) and chlorophyll-a (bottom)
The presence of trends in ecological data series can be analysed by linear or nonlinear regression functions (Rosenblatt, 2000). In their simplest way ecological data series of indicator values are related to time by an equation of the form \({\textit {\textbf y}} = b_0 + b_1 (t)\) where y is the ecological indicator, t is the time, b 0 and b 1 are the least square estimates of the intercept and slope coefficients. The slope b 1 indicates the average rate of change in the indicator during each time instant of the time period. If the slope is significantly different from zero, the trend in the water quality indicator is equal to the magnitude of the slope and the direction of the trend is defined by the sign of the slope. The trend is increasing if the sign is positive and decreasing if the sign is negative. If the slope is not significantly different from zero, there is no trend in the water quality indicator. An advantage of this technique of trend analysis is that it is easy to apply to a long-term data set (Fig. 8.3).

Linear trend of water temperature (top), dissolved oxygen (middle), and chlorophyll-a (bottom)
The trend lines presented in Fig. 4.3 are computed as follows:
-
Water temperature \(y(t) = 11.8 + 0.00167 \cdot t\),
-
Dissolved oxygen \(y(t) = 8.935 + 0.00129 \cdot t\),
-
Chlorophyll-a \(y(t) = 50.37 - 0.00033 \cdot t\).
The method may fail to detect trends that are nonlinear but still monotonic (in one direction). Other approaches such as the Mann–Kendall test can equally be used for detecting monotonic and nonlinear trends, but it only indicates the direction and not the significance of the trends.
Another advanced statistical data modelling technique for stationary ecological processes is the so-called ARMA (autoregressive moving average) or ARIMA (autoregressive integrated moving average) modelling which is based on the theory of linear stochastic processes. Figure 8.4 shows examples of this procedure for a physical, a chemical, and a biological variable of a shallow lake ecosystem.

ARMA (3,3) model for water temperature (top), ARIMA (1,1,2) model for dissolved oxygen (middle), ARIMA (3,1,3) model for chlorophyll-a
The stochastic signal x(t) will be extracted from white noise e(t). For equidistant data the following stochastic difference equation is valid: \(a_0 x(t) + a_1\break x(t - 1) + \ldots + a_{\textrm{r}} x(t - r) = b_0 e(t)+ \ldots + b_1 e(t - l).\) Using the shift operator q–1 and the relation \(x(t - n) \cong x(t)q^{ - n} \) one gets \(A(q^{ - 1} )x(t) = B(q^{ - 1} )e(t)\). From this equation the AR-model of order r and the MA-model of order l can be derived. Then, the ARMA-model of order (r, l) can be computed for \(a_0 = b_0 = 1\), while the ARIMA-model is described by the equation \(A(q^{ - 1} )\Delta ^d x(t) = B(q^{ - 1} )e(t)\). The expression \(\Delta ^d x(t)\) means the difference of two neighboured data. These types of data models are valid for short-term and for long-term data sets. As can be seen at the right-hand site of the figure, the predicted values of indicators are sometimes far from reality.
2.3 Statistics of Frequency Domain
Any periodic signal of frequency f can be represented as the sum of properly chosen sinusoidal waves (Box et al., 1994; Brémaud, 2002). This resulted in the development of a family of mathematical techniques among which is the Fourier polynomial.
2.3.1 Fourier Analysis
Ecological processes which tend to undergo variation over time can be treated by means of orthogonal trigonometric (time-) function series which are called Fourier series. The elements of these series are conceived as scattered harmonic oscillations with the frequencies \(\omega _k = k\omega _0 = k2\pi /T_0 \), their amplitudes and phases being exposed to random variation. A basic oscillation with frequency ω 0 is obtained for \(k = 1\) and corresponding distortions will be recordable if \(k = 2,3, \ldots \). With the coefficients being determined in the way described, the finite approximating trigonometric sum will have \(y(t) = F(t)\) for any value of n:
and a minimum mean quadratic deviation regarding y(t). Relations \(A_k = \surd a^2 _k + b^2 _k \) and \(\varphi _k = \textrm{arc}\break {\textrm{tan}}(b_k /a_k )\) apply to the amplitude and phases of the
approximated oscillations, with phases φ k in the interval [0, 2π] being uniformly distributed with constant probability density \(w(\varphi _k ) = {{\scriptstyle 1}\kern-0.1em/\kern-0.15em{\scriptstyle 2}}\pi \), while the amplitudes satisfy the conditions of a Rayleigh distribution (Box et al., 1994).
In a system which consists of several dynamic sub-systems the output variable will be of an almost harmonic shape even with the presence of nonlinear intermediate elements, which enables the application of Fourier analysis to nonlinear systems. By using Fourier analysis for identification of linear or linearised systems, the periodic pattern of influence variable is given with sufficient accuracy by a function of the following form \(y(t) = a_0 \Sigma A_k \sin (k\omega _0 t + \varphi _k )\). An estimation of the part of overall variance of the observed process explained by the harmonic function is possible by means of the following equation \({\mathop{\textrm var}} (\% ) = 100 \cdot A_k ^2 /2 \cdot {\mathop{\textrm cov}}\,{\hbox{ with cov}} = 1/(n - 1)\Sigma (y_i - \tilde y)^2 .\) The percentual variance may be statistically secured by application of the F test to the ratio: variance of natural oscillation/variance of predicted oscillation.
The number of cosine and sine terms can be progressively increased in order to obtain an acceptable approximation of cycling behaviour. The advantage of Fourier approximation is the more or less very good description of physical cycling processes (cf. Fig. 8.5).

Fourier approximation of water temperature, R 2 = 0.95
The model equation is given by \(y(t) = 13.02 + 0.41\break \cos (0.008t) + 0.029\sin (0.008t) - 9.673\cos(0.017t) - 0.47\sin (0.017t)\).
For ecological processes with high levels of disturbances caused by internal and external driving forces this method can be used by restrictions only. Fourier polynomials are appropriate for processes with fixed frequencies, while natural processes especially those represented by chemical and biological indicators have varying frequencies. Figure 8.6 shows Fourier approximations which are not acceptable for predictions. This is because a physical indicator like water temperature is mainly influenced by external driving forces such as solar radiation, while high fluctuations observed in biological indicators like chlorophyll-a are dependent on external driving forces and internal ecological state variables such as light and nutrients availability. Chemical indicators such as dissolved oxygen are significantly influenced by natural and artificial external driving forces as well as by natural internal states. They fluctuate as these factors fluctuate.

Fourier approximation of dissolved oxygen, R 2 = 0.30 (top) and chlorophyll-a, R 2 = 0.75 (down)
2.3.2 Autocorrelation and Cross-Correlation
Steady-state ecological processes are characterised by their time-related linear and quadratic mean values. These, however, do not yet provide any information on mutual influences between the values of x(t) due to the existence of energy storages and feedbacks in the ecosystem under review. Deeper insights into these correlations may be obtained with the aid of correlation functions (generalisation of quadratic mean values).
The autocorrelation function ACF gives the degree of relationship between the values of x(t). It is defined by \(\Phi _{xx} (\tau ) = \lim 1/2T_0 \smallint x(t) \cdot x(t \pm \tau ){\textrm{d}}t\) where the limit process runs from T to ∞, and integration is done from −T to +T. The cross-correlation function CCF describes the correlation between two different variables x(t) and \(y(t):\Phi _{xx} (\tau ) = \lim 1/2T_0 \smallint x(t) \cdot\break x(t \pm \tau ){\textrm{d}}t\). The correlation time τ Φ of a stochastic process x(t) is defined as the time which has to pass before the amount of difference \(\Phi _{xx} (\tau )\) and \(x^2 (t)\) drops below a specified ɛ bound (e.g. \(\varepsilon \le 10^{ - 5} \)). If a periodic part is contained in process x(t), a periodic part will be assigned also to ACF, all in the same period, whereas ACF of an accidental process, superimposed by noise, will decay.
The autocorrelation refers to the correlation of the signal with its past and future values. It is a method for characterizing the correlation within a signal over time. The autocorrelation function measures the correlation between two values of the same variable x i and x i+k and is used to detect non-randomness in the data (Rebecca, 1999). Correlograms are very practical for the determination of the dependence between successive observations of a time series (Fig. 8.7). If the correlogram indicates the existence of correlation between successive terms x(t) and x(t + k), the signal is assumed dependent or said to exhibit long memory (Beran, 1998).

Correlograms of dissolved oxygen (top), chlorophyll-a (middle), and water temperature (bottom)
The correlogram of the water temperature signal clearly shows the presence of a strong dependence of the future values on the present ones. The signal exhibits long memory with the absence of any form of randomness. The signal of the chemical indicator dissolved oxygen equally portrays persistence as shown in the correlogram, though not as strong as in the case of water temperature. This as well means that the future values of the signal are strongly influenced by the present values. The signal of the biological indicator chlorophyll-a also reveals the presence of dependence of the future values on the present ones. As is shown in Fig. 8.7, all the three signals have a long memory with the signal of the physical indicator having the strongest autocorrelation compared to the other two. This has implications on monitoring in the sense that it will be more cost effective not to sample the signal at a high resolution so as to avoid a lot of redundant information.
2.3.3 Spectral Analysis
From time correlation functions the frequency correlation functions are derived by Fourier transformation. In a given frequency domain time functions can be depicted by their Fourier transformations, the spectral function, or power spectra. Such a transformation is not feasible unless x(t) is absolutely integrable. This demand cannot be met, in the first place, by random signals, since convergent Fourier transforms do not exist in a stochastic process. The same condition, however, is satisfied by correlation functions.
The auto-power spectrum \(S_{xx} (\omega )\) of x(t) is the Fourier transform of ACF:
The variability of ecological processes are expressed by variations in signals (due to annual cycles, seasonal variations, diurnal rhythm, etc.) are clearly reflected in the auto-power spectrum by one or several peaks, though in processes with highly oscillation components, the associated spectral function tends to be more smoothed. It will be visualised as a function of frequency by means of the periodogram and cross-spectral analysis. Figure 8.8 shows such a periodogram for chlorophyll-a where two frequencies can be considered as dominant for algal development.

Periodogram of chlorophyll-a
The cross-power spectrum \(S_{xx} (\omega )\) of two stochastic processes x(t) and y(t) is the Fourier transform of CCF:
\(S_{xy} (\omega )\) is a complex function. The limitation of CCF is considered by what is called a window function \(h(\tau ):S_{xy} (\omega ) = 1/2\pi \cdot \smallint \Phi _{xy} (\tau )h(\tau ) \cdot {\textrm{e}}^{ - {\textrm{j}}\omega \tau }\break {\textrm{d}}\tau {\textrm{ = S}}_{xy} (\alpha ) \cdot H(\omega - \alpha )\) where \(H(\omega )\) is the Fourier transform of \(h(\tau )\) which distorts \(S_{xy} (\omega )\) to \(S_{xy}^ - (\omega )\).
The coherency functions \(CO_{xy} (\omega )\) is a measure of synchronicity of the ecological processes x(t) and y(t) and can be derived from spectral functions \(S_{xx} (\omega ),S_{yy} (\omega )\) and \(S_{xy} (\omega )\):
The following relation applies to phase shifting between both signals:
Frequency resolution depends on both the length of the period of measurement and the time spacing between measured data. The highest recordable frequency ν max can be calculated from the scanning step width, according to Shannon’s theorem: \(v_{\max } = 1/2 \cdot \Delta \tau {\textrm{ resp}}{\textrm{. }}\omega _{{\textrm{max}}} = \pi /\Delta \tau. \) If, due to scanning, the spectrum of a variable can be calculated only up to an upper frequency, v h , no higher frequencies must be contained in the signal itself. These will be undistinguishably ‘folded into’ the lower frequencies range, which will entail distortion of the spectrum (aliasing effect) (Jørgensen, 1994). Should such highly oscillation components be contained in the process, there are only two ways by which to cope with the problem:
-
1.
Increase of the frequency of scanning (either by reduction of spacing between measured data or by lengthening of the data set by long-term observations).
-
2.
To suppress these high oscillations by band-pass or low-pass filtering prior to computation of the spectrum.
3 Wavelet Analysis
Wavelets analysis is a mathematical tool that has been proven useful for timescale-based analysis of ecological processes. It is a solution to the timescale analysis problem because it offers an effective approach of extracting both the information on the time localization and the frequency content of the time series (Daubechies, 1990, 1992; Mallat, 1998). The main idea behind wavelet analysis is to imitate the windowed Fourier analysis, but using basis functions (mother wavelets) that are better suited to capture local behaviour of non-stationary ecological signals. They dilate and translate features which are local in time and frequency (Debnath, 2002; Shumway, 2005). Wavelet analysis makes use of the different wavelet basis functions in the wavelet transform to project a signal from the time domain into the timescale domain. It decomposes a signal into its constituents at different timescales (Shumway & Stoffer, 2000).
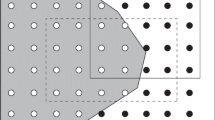
A wavelet is a small wave and a wave is a real valued function that is defined over the entire real axis and oscillates back and forth about zero with the amplitude of the oscillations remaining relatively constant everywhere (Percival & Walden, 2000) like the sine wave. Wavelets come in families generated by the father wavelet Φ and a mother wavelet ψ. A wavelet is a function of time that obeys the following wavelet admissibility conditions \(\smallint \varPsi (t){\textrm{d}}\hbox{t = 0}\) and \(\smallint \Phi (t){\textrm{d}}\hbox{t = 1}\) (Gençay, Selcuk, & Whitcher, 2002). Father wavelets used to represent the long-scale smooth or low-frequency component of a signal integrates to one, while the mother wavelet used to capture the detailed and high-frequency components or deviations from the smooth components, integrates to zero. The father wavelet gives rise to the scaling coefficients, while the mother wavelet gives rise to the differencing coefficients. Hence, the father wavelet acts as a low-pass filter, while the mother wavelet acts as a high-pass filter (Fig. 8.9).

Principle of wavelet decomposition of an ecological signal
The wavelet transformation is a function W of two variables u and s obtained by projecting a signal x(t) on to a particular mother wavelet Ψ which gives a translated and dilated version of the original wavelet function.
There are two essential wavelet transforms, namely the continuous (CWT) and the discrete wavelet transforms (DWT).
3.1 The Continuous Wavelet Transform
This is a function of two variables W(u, s) obtained by projecting a signal x(t) on to a particular wavelet Ψ and is given by
and
where s is the scale parameter and u is the location parameter. Changing s produces dilating effects (s > 1) or contracting effects (s < 1) of the function ψ(t). Changing u analyses the signal x(t) around different points of u. The continuous wavelet transform is applied to functions x(t) defined over the entire real axis. But, in ecological applications, there are only a finite number n of sampled values, rendering the CWT inadequate. Hence, there is a need for a discrete version.
3.2 Discrete Wavelet Transform
Implementing the wavelet transform on sampled data requires the discretisation of the scale and location parameters. Kumar and Foufoula-Georgiou (1997) demonstrated that in discretising the two parameters (s,u), one can choose \(S = mS_0 \), where m is an integer and S 0 is a fixed dilation step greater than one. Given \(\sigma _s = S\sigma _1 \), one can choose \(t = nt_0\, mS_0 \), where \(t_0 > 0\) is dependent on ψ(t) with n being an integer. By defining,
then the discrete wavelet transform is given by
When the DWT is applied to a time series or vector of observations x, it gives n wavelet coefficients
the coefficients can be organized into (J + 1) vectors \(w = \left[ {w_1 , \ldots ,w_j ,v_J } \right]T\), with w j being the length and n/2J vector of scaling coefficients associated with averages on a scale of length 2J (Whitcher, 1998).
Applying shifted and scaled versions of a wavelet function ψ(t) decomposes a signal x(t) into simpler components. Wavelet analysis acts as a lens for inspecting the time varying structure of signals and relationships between signals. In multiresolution signal decomposition the time and frequency-dependent ecological process x(t) will result in the wavelet transform results in a low-pass scaling filter (father wavelet) and in high-pass wavelet filter (mother wavelet) acting as a high-pass filter. The procedure can be seen from Fig. 8.10.

Principle of signal approximation (A) and decomposition (D)
Given a signal of length \(n = 2j\), a maximum of j filtering procedures can be performed creating j different resolution scales. The wavelet filter represents the details (d) or wavelet coefficients. It reveals the variations at different scales (multiresolution decomposition (MRD)). The scaling filter gives the smoothed version (a) of the original signal (cf. Fig. 8.11). This multiresolution approximation (MRA) filters information in the signal at different scales. If time records of daily data are available, Table 8.3 shows the frequencies associated with the different levels of decomposition or details.

Multiresolution decomposition of a dissolved oxygen time series using the Daubechies 8 mother wavelet
Wavelet analysis was applied to dissolved oxygen time series of the River Havel, sampled at daily interval at the Potsdam monitoring station in the State of Brandenburg, Germany. The approximations shown in Fig. 8.11 reveal time-dependent variations and the long-term evolution of the dissolved oxygen record. The variations are not homogenous across time. The highest resolution a 7 indicates an upward movement with stable cycles from the third year. The decreasing effect of long-term DO changes after the fifth year indicates the changes of the underlying basic cycling behaviour. The details reveal that the daily variations (d 1) are less prominent than the weekly (d 4) and bi-weekly (d 5) variations. The variations become smaller at the bimonthly scale (d 7). This gives rise to the opportunity of checking the sampling strategy.
The variance of a signal can equally be decomposed using this technique. Gençay et al. (2002) showed that the time-varying variance for a signal x(t) is the variance of the scale s j wavelet coefficient w j,t using \(\sigma _{x,t} ^2 (s_j ) = (1/2s_j ) \cdot {\mathop{\textrm var}} (w_{j,t} ).\)
The wavelet variance shown in Fig. 8.12 reveals the intensity of variation from one scale to the other of the dissolved oxygen time series.

Wavelet variance of dissolved oxygen using db8. U – upper 95% significance level, L – lower 95% significance level
The wavelet variance presented in Fig. 8.12 quantifies and indicates how much each scale contributes to the overall variability of the dissolved oxygen signal. It reveals that the variation in the time series increases progressively till scale 8 where a local maximum can be observed. Scales 8, 16, and 32 are more or less the same and contribute the most to the overall variability with the daily variations contributing the least. There is no significant increase in the variations that occur after scale 8. The dissolved oxygen curve is dominated by long-term changes or low frequencies. Rapid changes in algal productivity and respiration cannot be captured by dissolved oxygen measurements. Monitoring at scales lower than scale 8 gives redundant information. Hence, the optimal wavelet scale of monitoring is 8 for this indicator and the ecosystem under consideration.
Similar to the wavelet variance of a univariate signal, the wavelet covariance decomposes the covariance between two signals on a scale-by-scale basis (Whitcher, 1998). The wavelet covariance is the covariance between the scale s j wavelet coefficients from a bivariate signal. After Gençay et al. (2002) the wavelet covariance for a bivariate stochastic signal of the scale s j is given by
and a scale-by-scale decomposition of the covariance is given by
Then, the wavelet cross-covariance is given by introducing a time lag τ between the signals:
It is known that the correlation between dissolved oxygen and water temperature is a negative one. The wavelet covariance between dissolved oxygen and water temperature in Fig. 8.13 shows a linear increase in the cross-covariance up to scale 8 (approximately 1 week) after which the co-variation starts dropping and increases negatively at scale 32. The changes of DO are determined mainly by the low-frequency behaviour of water temperature.

Wavelet cross-covariance between dissolved oxygen and water temperature using db8
From the wavelet cross-covariance, the wavelet correlation (or normalised cross-covariance) is obtained:
It must be noted that the wavelet correlation is not a test of cause–effect relationship. But comparisons of wavelet correlations enable a deeper insight in the long-term interrelationships of ecological variables. Results of wavelet correlations between dissolved oxygen and chlorophyll-a, and between dissolved oxygen and water temperature are presented in Fig. 8.14. The wavelet correlation of DO and chlorophyll-a (phytoplankton biomass) is quite different from those of DO and water temperature. At wavelet scale 8 (approximately 1 week) the highest influence of phytoplankton biomass on DO can be seen. In opposite of that the overall wavelet correlation of DO and water temperature indicates a more or less constant and positive relationship at scales 2, 4, and 8. There is a decrease in the strength of the positive relationship from scale 8 and becomes significantly negative at scale 32. It shows that the fluctuations of the DO time series are caused by the lower high-frequency scales (1–8) and the variations of the DO signal by the higher low-frequency scales (16 and 32).

Wavelet correlation of dissolved oxygen with chlorophyll-a (left) and water temperature (right)
Introducing a time lag τ to the wavelet correlation the wavelet cross-correlation is obtained:
Figure 8.15 shows the lead–lag relationship between the indicators dissolved oxygen and water temperature. The behaviour has been decomposed into different timescales by means of wavelet cross-correlation. The correlation effects between the two variables investigated is shown on each level. It can be seen that the high-frequency level (level 1) does not contribute to the expected shift between both indicators. This level characterises the noise contained in the original time series. Significant shifts are observed from level 2 to level 6 with increasing time lag. From level 2 to level 5 the values of wavelet cross-correlation at lag 0 are positive, while for level 6 this value will be negative. This confirms that water temperature effects on dissolved oxygen are stronger at low-frequency levels than at high-frequency levels.

Cross-correlation between dissolved oxygen and water temperature using db4
4 Statistics and Long-Term Ecological Research
Ecosystems are complex dynamic nonlinear systems. Grant, Pedersen, and Marín (1997) compared methods of problem solving in ecology in terms of the relative level of understanding and the relative amount of data available on the ecosystem under consideration. From this point of view statistics plays an important role for long-term ecological research. While for short-term measurements (or observations) of ecological variables only classical static statistical methods should be applied to extract environmental information from the data, for the analysis of long-term ecological data records dynamic statistical procedures should be applied only. But, Fourier polynomials are based on fixed frequencies. From Fig. 8.16 can be seen that the Fourier polynomial is not able to follow a natural process like global radiation.

Fourier polynomial of global radiation
Therefore such polynomials are not well suited to analyse long-term records environmental time series. A wavelet analysis was applied to long-term ecological data series to study the underlying nature of ecological processes under consideration. The following Figs. 8.17, 8.18, and 8.19 present examples of ecological variables taken from a freshwater ecosystem for a physical, a chemical, and a biological variable. They were recorded from 1998 to 2003. Figure 8.17 gives an example for a physical variable. In each case, the upper panel shows the original time record.

Long-term approximations of water temperature

Long-term approximations of dissolved oxygen

Long-term approximations of chlorophyll-a
When the wavelet approach was used to decompose the water temperature record till level 8, it was observed that a longer cycle was hidden within the yearly cycles. Extending it to level 10 a longer cycle can be seen. This shows the need for analyzing longer ecological records so as to unravel long cycles hidden in signals. Investigating the reason for these cycles may be greatly relevant for a sustainable management of ecosystems.
The dissolved oxygen record (Fig. 8.18) contains a slow upward trend. By decomposing this record up to level 10 it was found that longer cycles which were not visible in the basic record are revealed.
The time record of chlorophyll-a (Fig. 8.19) shows a behaviour with two interesting areas of high algal biomass. They are caused by growth of diatoms in spring and of cyanobacteria in summer and fall. Taking of all environmental induced variations from the record a simple tendency underlying this record can be seen.
5 Conclusions
Statistical analysis of ecological data series by modern methods makes possible the investigation and quantification of the variation across different timescales as well as the dominant scale of variation and the identification of the relationships existing between complex ecological processes on a scale-by-scale basis. It allows the decomposition of signals according to their different frequency levels which characterise the intensity of natural and man-made disturbances. The analysis of long-term records of ecosystem signals is necessary for extracting information required for their sustainable management. This can be done using classical time series analysis methods with different levels of success. The structural characteristics of the signals such as the presence of trends, dependence, and long memory can be detected by techniques such as the cumulative sum, trend analysis, and the autocorrelation function. These techniques reveal that the ecological signals are non-stationary and have to be rendered stationary before applying time series models like the Box–Jenkins and the Fourier approximation modelling approaches. The non-stationary structure due to internal and external driving forces in ecosystems poses no problems to wavelet analysis which reveals the basic variation present in the signals. In so doing, it unravels any hidden long-term cycles which seem to be present in the ecological signals. It is of great importance to analyze the signals over longer periods of time so as to extract the underlying general tendency.
The following questions can be effectively answered by the help of wavelet analysis. What is the dominant scale of variation influencing the observed general tendency of the indicator? Are the variations from 1 day to the next more prominent than the variations from 1 week to the next? Are the statistical variations in the ecological indicator homogenous across time? What are the time-dependent variations such as the presence of trends? How are two indicators related on a scale-by-scale basis? How do they covary at different scales? These questions can be answered by modern statistical methods which consider not only the probability distribution of ecological data but also the inherent time structure of ecological processes.
References
Aström, K. (1970). Introduction to stochastic control theory. New York. Academic Press.
Beck, M. B. (1979). Model structure identification from experimental data. In E. Halfon (Ed.), Theoretical systems ecology. New York: Academic Press.
Beran, J. (1998). Statistics for long-memory processes. Boca Raton: Chapman & Hall.
Bliss, C. J. (1970). Statistics in biology (vol. I, II, III). New York: McGraw-Hill.
Bloomfield, P. (1976). Fourier analysis of time series: An introduction. New York: Wiley.
Box, G. E. P., Jenkins, G. M., & Reinsel, G. C. (1994). Time series analysis. Englewood Cliffs: Prentice Hall.
Brémaud, P. (2002). Mathematical principles of signal processing. New York: Springer.
Brezonik, P. L., & Shannon, E. E. (1971). Trophic state of lakes in North Central Florida. Water Resources. Research Center, University of Florida, 13, 1–102.
Brockwell, P. J., & Davis, R. A. (1998). Introduction to time series and forecasting. Berlin: Springer.
Chatfield, C., & Collins, A. J. (1989). Introduction to multivariate analysis. London: Chapman & Hall.
Chui, C. K. (1992). An introduction to wavelets. New York: Academic Press.
Ciecka, J., Fabian, R., & Merilatt, D. (1980). Eutrophication measures for small lake water quality management. Water Resources Bulletin, 16, 681–689.
Daubechies, I. (1990). The wavelet transform, time-frequency localization and signal analysis. IEEE Transactions on Information Theory, 36, 961–1005.
Daubechies, I. (1992). Ten lectures on wavelets. Philadelphia, PS: SIAM.
Debnath, L. (2002). Wavelet transforms and their applications. Basel: Birkhäuser.
Eason, G., Coles, C. W., & Gettinby, G. (1980). Mathematics and statistics for the bio-sciences. Chichester: Ellis Horwood.
Einax, J., Zwanziger, H. W., & Geiß, S. (1997). Chemometrics in environmental analysis. Weinheim: VCH.
Gençay, R., Selcuk, F., & Whitcher, B. (2002). An introduction to wavelet and other filtering methods in finance and economics. New York: Academic Press.
Grant, W. E., Pedersen, E. K., & Marín, S. L. (1997). Ecology and natural resource management. New York: Wiley.
Green, P. E. (1978). Analyzing multivariate data. Hinsdale: Dryden Press.
Haining, R. (2003). Spatial data analysis. Cambridge: Cambridge University Press.
Han, J., & Kamber, M. (2006). Data mining – concepts and techniques. New York: Morgan Kaufmann.
Hipel, K. W., & McLeod, A. I. (1994). Time series modelling of water resources and ecological systems. Amsterdam: Elsevier.
Joliffe, I. T. (1986). Principal component analysis. Berlin: Springer.
Jørgensen, S. E. (1994). Fundamentals of ecological modelling. Amsterdam: Elsevier.
Koopmans, L. H. (1985). The spectral analysis of time series. San Diego: Academic Press.
Krzanowski, W. J. (1990). Principles of multivariate analysis. Belfast: The University Press.
Kumar, P., & Foufoula-Georgiou, E. (1997). Wavelet analysis for geophysical applications. Revues of Geophysics. 35, 385–412.
Latini, G., & Passerini, G. (Eds.). (2004). Handling missing data. Southampton: WIT Press.
Legendre, L., & Legendre, P. (1983). Numerical ecology. Amsterdam: Elsevier.
Lepš, J., & Šmilauer, P. (2003). Multivariate analysis of ecological data using CANOCO. Cambridge: Cambridge University Press.
Little, R. J. A., & Rubin, D. B. (1987). Statistical analysis with missing data. Chichester: Wiley.
Ludwig, J. A., & Reynolds, J. F. (1988). Statistical ecology. New York: Wiley.
Mallat, S. (1998). A wavelet tour of signal processing. New York: Academic Press.
Massart, D. L., & Kaufman, L. (1983). The interpretation of analytical chemical data by the use of cluster analysis. New York: Wiley.
Mateu, J., & Montes, F. (2001). Spatial statistics. Southampton: WIT Press.
McLachlan, G. J. (1992). Discriminant analysis and statistical pattern recognition. Chichester: Wiley.
Patil, G. P., Pielou, E. C., & Waters, W. E. (1971). Statistical ecology (vol. I, II, III). London, Pennsylvania: State University Press.
Pearson, R. K. (2005). Mining imperfect data. Philadelphia: SIAM.
Percival, D. B. (1995). On estimation of the wavelet variance. Biometrika, 82, 619–631.
Percival, D. B., & Walden, A. T. (2000). Wavelet methods for time series analysis. Cambridge: Cambridge University Press.
Pielou, E. C. (1977). Mathematical ecology. New York: Wiley.
Pollock, D. S. G. (1999). A handbook of time-series analysis, signal processing and dynamics. San Diego: Academic Press.
Powell, T. M., & Steele, J. H. (Eds.). (1995). Ecological time series. New York: Chapman & Hall.
Rebecca, M. (1999). Spectral analysis of time series data. New York: Guilford Press.
Reckhow, K. H., & Chapra, S. C. (1983). Engineering approaches for lake management. Vol. 1: Data analysis and empirical modelling. Boston-London-Sydney-Wellington-Durban-Toronto: Butterworth.
Rosenblatt, M. (2000). Gaussian and non-Gaussian linear time series and random fields. Berlin: Springer.
Schulze, E.-D., & Mooney, H. A. (Eds.). (1994). Biodiversity and ecosystem function. Berlin: Springer.
Shastry, J. S., Fan, L. T., & Erickson, L. E. (1973). Nonlinear parameter estimation in water quality modelling. Journal of the Environmental Engineering Division, 99, 315–331.
Shumway, R. H. (2005). Time series analysis and its applications. New York: Springer.
Shumway, R. H., & Stoffer, D. S. (2000). Time series analysis and its applications. New York: Springer.
Straškraba, M., & Gnauck, A. (1985). Freshwater ecosystems – modelling and simulation. Amsterdam: Elsevier.
Thomann, R. V., & Mueller, J. A. (1987). Principles of surface water quality modelling and control. New York: Harper & Row.
Webster, R., & Oliver, M. A. (1990). Statistical methods in soil and land resource survey. Oxford: Oxford University Press.
Whitcher, B. J. (1998). Assessing nonstationary time series using wavelets. PhD Thesis, Department of Statistics, University of Washington, Seattle.
Young, P. C., & Young, T. (1992). Environmetric methods of nonstationary time-series analysis: Univariate methods. In C. N. Hewitt (Ed.), Methods of environmental data analysis. New York: Elsevier.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2010 Springer Science+Business Media B.V.
About this chapter
Cite this chapter
Gnauck, A., Li, BL.L., Feugo, J.D.A., Luther, B. (2010). The Role of Statistics for Long-Term Ecological Research. In: Müller, F., Baessler, C., Schubert, H., Klotz, S. (eds) Long-Term Ecological Research. Springer, Dordrecht. https://doi.org/10.1007/978-90-481-8782-9_8
Download citation
DOI: https://doi.org/10.1007/978-90-481-8782-9_8
Published:
Publisher Name: Springer, Dordrecht
Print ISBN: 978-90-481-8781-2
Online ISBN: 978-90-481-8782-9
eBook Packages: Earth and Environmental ScienceEarth and Environmental Science (R0)