
Abstract
This paper deals with the mathematical way of modeling solar panels involving mathematical equations for the calculation of solar panel current. Along with the conventional inputs series and shunt resistances are taken as additional inputs. Maximum Power Point Tracking (MPPT) algorithms implementing Perturb and Observe (P&O) and fuzzy logic techniques having the same voltage and current variables as inputs are implemented and their efficiencies are checked. A standard configuration of the boost converter employing a MOSFET device as a switch is implemented to obtain a constant DC output voltage. The MPPT algorithms identify the duty cycle at which the gating pulses have to be given to the switching device so that triggering occurs at the maximum power point thereby delivering maximum power to the load. Simulation results are obtained in MATLAB Simulink environment based on the mathematical and electrical models developed.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
74.1 Introduction
Solar energy production is one of the fastest growing renewable energy productions as the energy utilized is the light energy which comes from the sun which is inexhaustible. There are specific types of materials which generate current upon absorbing light. Those materials are called as photovoltaic materials. This voltage can be effectively utilized by series and parallel combination of cells [1]. The energy produced by the solar panels cannot be delivered efficiently to the load. Maximum power point controllers are modeled to extract the maximum power from the solar panels. Throughout the literature studies many authors have concentrated in the modeling of solar panels. Also many types of algorithms have been implemented in many papers. In [2], a fuzzy logic based controller is used to track the maximum power and the results are compared for various types of solar modules. In [3–6], a grid connected solar panel is modeled and [5] the controllers are developed to sense the grid active and reactive power. In [3], a buck boost converter is designed and a microcontroller is used to control the converter for maximum power transfer. In [7], simulation models for solar cells are developed in simelectronics environment. In [8], analytical techniques are used for modeling non-linear DC-AC switching converter for PV systems under islanding conditions. In [9, 10], a new algorithm is proposed to extract maximum power from the radiation. A detailed study is made for the solar energy in [1, 11]. In [12], solar based thermo electric generators are developed. The performance of PID controller and Fuzzy Logic controller are compared for various operating conditions in [13]. In this work, mathematical modeling of solar panels is done. Along with the conventional inputs such as insolation and temperature, series and shunt resistances are taken as additional inputs. The solar panel characteristic curves are checked for various input variables such as temperature, irradiation, series resistance and shunt resistance. To track the maximum power, MPPT controllers employing P&O type and also a fuzzy logic controller is implemented along with the boost converter. The performances of the MPPTs are compared with each other.
74.2 Mathematical Modeling of Solar Panel
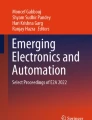
The Fig.74.1 shows the equivalent circuit of the PV panel and it’s represented by a current source in parallel with a conventional diode. Since an average solar cell produces less than 2 W, the cells must be added in series and parallel in order to get a higher voltage [2].

Equivalent circuit of a PV cell
74.3 Maximum Power Point Tracking Algorithm
The voltage obtained for loads such as battery, DC motors, resistors could be enhanced with a better efficiency if the operating points are kept near the knee of the P-V and I-V curves. The devices used to maintain such a constant voltage are maximum power point trackers. A fuzzy logic MPPT controller tracks the maximum power when compared to other methods. The flowchart shows the algorithm for the implementation of fuzzy logic based algorithm for MPPT. In this algorithm, PV input voltage and current are taken as inputs. The duty cycle of the converter is taken as output [13] (Fig. 74.2).

Flowchart for the fuzzy logic controller implemented
The equations associated for the calculation of error and changes in error are as below.
where, E(K)—error value, CE(K)—change in error value, \( \Delta {\text{I}}({\text{K}}) \)—change in current value, \( \Delta {\text{V(K)}} \)—change in voltage value, \( \Delta {\text{P(K)}} \)—change in power value [13]. The function of the fuzzy logic controller is to maintain a constant duty cycle for varying output voltage at the load so that power transfer is maximum.
74.3.1 Membership Functions
In this work five triangular and two trapezoidal shaped membership functions are selected. Their ranges are calculated based on the oscillation of each signal. The inputs are error and change in error. The output is the duty cycle given to the boost converter. The degree of membership function ranges from 0 to 1.
Figures 74.3, 74.4 and 74.5 are the membership function plot for error, change in error and duty cycle respectively. Each of the variables has seven membership functions. Thus a total of fourteen membership functions are used for input variables and seven membership functions are used for output variables.

Membership function plot for error

Membership function plot for change in error

Membership function plot for duty cycle
74.3.2 Rule Settings for Fuzzy Controller
Different subsets can be used for tuning the rules for fuzzy logic controller. The subset used for this work consists of 49 rules which have been tuned. These rules give better accuracy and dynamic response although their tuning is difficult. The fuzzy rules are given in Table 74.1.
74.3.3 Perturb and Observe Type of MPPT
Perturb and observe type is the simplest and the most common method. The input variables taken are change in current, voltage and power. The output variable is the change in power. The flowchart implemented in the algorithm is shown [11]. The flowchart make uses the voltage perturbation as shown in Fig. 74.6. An alternative method uses the same input variables to perturb the duty cycle. This method is not used in the project as the duty cycle perturbations are random in this method and not accurate.

Flowchart of the P&O algorithm implemented
74.4 Operation and Design of the Boost Converter
Figure 74.7 shows the basic circuit configuration of a boost converter, where Vin is the dc input voltage, L is the boost inductor, S is the controlled switch, D is a diode, C is a filter capacitor, and RL is the load resistance. Boost converter works in two states. When the switch S is open, current in the boost inductor increases linearly, and the diode D is off at that time. When the switch S is closed, the energy stored in the inductor is released through the diode to the output RL circuit.

Circuit diagram of the implemented boost converter
74.5 Results and Discussions
74.5.1 Variation of I-V and P-V Curves with Series Resistance
Addition of series resistance reduces the voltage which reduces the slope of the curves and the maximum power point is also reduced as seen in Figs. 74.8 and 74.9. Thus it is evident that with the increase in series resistance, the efficiency of the solar panel reduces.

Effect of variation of I-V and P-V curves with series resistance

Effect of variation of I-V and P-V curves with series resistance
74.5.2 Variation of I-V and P-V Curves with Shunt Resistance
The shunt resistance for a PV cell should be high. Lower value of shunt resistance leads to a steeper collapse of the curves which lowers the fill factor which is shown in Figs. 74.10 and 74.11.

Effect of variation of I-V and P-V curves with shunt resistance

Effect of variation of I-V and P-V curves with shunt resistance
74.5.3 Duty Cycle Obtained by FLC and P&O Controller
Figures 74.12 and 74.13 show the duty cycle waveform obtained by both the controllers. It can be seen that the fuzzy logic controller used tracks a constant duty cycle whereas the perturb and observe controller used does not track the duty cycle as efficiently as fuzzy logic controller.

Duty cycle tracked by the fuzzy logic controller and P&O controller

Duty cycle tracked by the fuzzy logic controller and P&O controller
A constant duty cycle is achieved at the beginning of the simulation whereas the P&O MPPT controller does not track a constant duty cycle for a very long time. The fuzzy logic controller shows an efficient operation when compared with the P&O controller.
74.6 Conclusion
The solar PV array is successfully modeled and the characteristics curves are observed for the change in irradiation, temperature, series and shunt resistances. Maximum power point controllers based on P&O and fuzzy logic controllers are modeled. The duty cycle curves for both the controllers are noted and it is evident that the fuzzy logic controller proves to be the best in comparison with the P&O MPPT controller. Thus the robustness of the fuzzy logic controller is justified. The simulation is done in MATLAB simulink environment (R2011).
References
Masters GM (2004) Renewable and efficient electric power systems. Wiley, New Jersey
Mahamudul H, Saad M, Ibrahim Henk M (2013) Photovoltaic system modelling with fuzzy logic based maximum power point tracking algorithm. Int J Photoenergy. doi:10.1155/2013/762946
Ahmed KT, Datta M et al (2013) A novel two switch non-inverting buck-boost converter based maximum power point tracking system. Int J Electr Comput Eng 3(4):467–477. ISSN:2088-8708
Manohar K, Sobha Rani P (2012) MPPT and simulation of grid connected photvoltaic systems. Int J Eng Sci 1(2):158–166
Ropp ME, Gonzalez S (2008) Development of a MATLAB/simulink model of a single-phase grid connected photovoltaic system. Energy Convers IEEE 24(1):195–202. doi:10.1109/TEC.2008.2003206
Chowdhury P, Koley I, Sen S, Saha PK, Panda GK (2013) Modelling, simulation and control of grid connected non conventional solar power generation system using matlab. Int J Adv Res Electr Electron Instrum Eng 2(4):1183–1191
Khanna V, Das BK et al (2013) MATLAB/SIMELECTRONICS models based study of solar cells. Int J Renew Energy Res 3(1):30–34
Chayawatto N, Kirtikara K, Monyakul V, Jivacate C, Chenvidhya D (2009) DC-AC switching converter modelings of a PV-grid connected system under islanding phenomena. Renew Energy 34(12):2536–2544. doi:10.1016/j.renene.2009.05.002
Armstrong S, Hurley WG (2010) A new methodology to optimise solar energy extraction under cloudy conditions. Renew Energy 35(4):780–787. doi:10.1016/j.renene.2009.10.018
Noguchi T, Matsomoto H (2007) Maximum power point tracking of photovoltaic using only single current sensor. doi: 10.1002/eej.20275
Garg HP (1982) Treatise on solar energy. In: Fundamentals of solar energy, vol I. Wiley, New York
Leon MTD, Chong H, Kraft M (2012) Design and modelling of SOI based solar thermoelectric generators. Proc Eng 47:76–79. doi:10.1016/j.proeng.2012.09.088
Mahammad Ak, Saon S, Chee WS (2013) Development of optimum controller based on MPPT for photovoltaic system during shading condition. Proc Eng 53:337–346. doi:10.1016/j.proeng.2013.02.044
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Appendix
Appendix
Parameters taken for simulation | Values |
|---|---|
Switching frequency | 100 kHz |
Solar PV array temperature | 25 °C |
Irradiation | 600 W/m2 |
No. of solar cells in series | 65 |
No. of rows solar cells in parallel | 4 |
Series resistance | 0.016 Ω |
Shunt resistance | 10 Ω |
Resistance of the load | 300 Ω |
Voltage step used in P&O algorithm | 0.01 |
Capacitance of the boost converter | 0.626 µF |
Inductance of the boost converter | 3.7 mH |
Rights and permissions
Copyright information
© 2015 Springer India
About this paper
Cite this paper
Sundarabalan, C.K., Selvi, K., Sakeenathul Kubra, K. (2015). Performance Investigation of Fuzzy Logic Controlled MPPT for Energy Efficient Solar PV Systems. In: Kamalakannan, C., Suresh, L., Dash, S., Panigrahi, B. (eds) Power Electronics and Renewable Energy Systems. Lecture Notes in Electrical Engineering, vol 326. Springer, New Delhi. https://doi.org/10.1007/978-81-322-2119-7_74
Download citation
DOI: https://doi.org/10.1007/978-81-322-2119-7_74
Published:
Publisher Name: Springer, New Delhi
Print ISBN: 978-81-322-2118-0
Online ISBN: 978-81-322-2119-7
eBook Packages: EngineeringEngineering (R0)