
Abstract
Flexural vibrations of layered structures composed of moderately thick elastic layers are studied. Alternative formulations of various higher-order theories are introduced that offer complete analogies between the corresponding initial-boundary value problems and those of homogenized single layer structures of effective parameters. Also the effects of an elastic interlayer slip are considered within appropriate equivalences. Moreover, the boundary value problem of a single damping layer showing fractional viscoelastic behavior is treated, where even closed-form solutions can be found for special load cases.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
Although the earlier theories for laminates were based on the Kirchhoff-Love hypothesis, it was soon recognized that, due to the relative small transverse stiffness of composites, thickness-shear deformations should be included to obtain realistic predictions of flexural behavior. Furthermore, for a composite structure whose material and geometric characteristics approach those of a sandwich element, a uniform transverse-shear strain assumption made in most laminate theories becomes unrealistic as it can be ascertained by comparison with a three-dimensional elasticity analysis. Transverse discontinuous mechanical properties cause displacement fields in the thickness direction, which can exhibit a rapid change in slopes corresponding to each layer interface (zig-zag effect). The transverse stresses must fulfill inter-laminar continuity at each layer interface.
In particular, a comparative study of different theories for the dynamic response of laminates is given in [1] and [2]. In [3], Reddy presents a review of equivalent single layer and layerwise laminate theories and discusses their mechanical models by means of the FEM and the mesh superposition technique.
If rigid bond between the laminates cannot be achieved, an interlayer slip occurs, that significantly can affect both strength and deformation of the layered structure. The mechanical behavior of layered beams and plates with flexible connection has been mainly discussed for civil engineering structures, compare [4–6]. Thermal and piezoelectric effects in two-layer beams are treated in [7] and [8], respectively. Murakami [9] proposes a general formulation of the boundary value problem, where any interlayer slip law can be adopted in the beam model. A correspondence between the analyses of sandwich beams with or without interlayer slip has been derived by the author in Refs. [10] and [11].
The present paper shows alternative formulations of various theories for layered structures that offer complete analogies between the corresponding initial-boundary value problems and those of homogenized single layer structures of effective parameters. The structures treated are composed of three moderately thick layers and even the effects of geometrically nonlinear large deflection and elastic interlayer slip are considered within appropriate equivalences.
Regarding the modeling of damping layers the paper introduces the initial-boundary value problem of the fractional viscoelastic Euler-Bernoulli beam, where, as a first step, closed-form solutions are introduced for quasi-static loads.
2 First Order Shear Deformation Laminate Theory
2.1 Layered Beams
Considering a layered beam to bend cylindrically and including the effect of transverse shear by means of Timoshenko’s kinematic hypothesis the displacement field is expressed as
where the origin of the Cartesian (x,z)-coordinate system is located in the global elastic centroid of the composite cross-section. x represents the axial beam coordinate and ψ(x; t) denotes the cross-sectional rotation. Thus the non-vanishing total strains at any point of the beam become
The constitutive relations for a linear thermo-elastic beam can be formulated according to the generalized Hooke’s law,
where E = E(x, z), G = G(x, z) are time-independent Young’s modulus and transverse shear modulus, respectively. θ = θ(x, z) represents a change of temperature with respect to a stress-free reference configuration, and α stands for the linear thermal expansion coefficient. Without loss of generality, we assume that E(x, z) = E(z), G(x, z) = G(z), and α(x, z) = α(z) in all further derivations. By means of spatial integration, the stress resultants become
The effective shear rigidity, S, follows from the concept of equivalent strain energy.
denote the cross-sectional means of thermal strain and curvature, respectively.
Applying the conservation of momentum and conservation of angular momentum, expressing the stress resultants by means of Eq. (4) and subsequent elimination of the cross-sectional rotation leads to a single fourth-order differential equation of motion for the beam deflection,
p(x; t) is an external load distribution, and the inertia terms, containing the mass density ρ(x), are
Equation (6) represents the equation of motion of a homogenized Timoshenko beam with effective parameters according to Eqs. (4), (5), and (7).
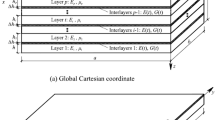
2.2 Symmetric Three-Layer Shallow Shells
For thermally loaded shallow shells composed of three isotropic layers with physical properties symmetrically disposed about the middle surface the corresponding equation of motion becomes, compare [12],
where the influence of rotatory inertia has been neglected. The corresponding effective parameters are
In Eq. (8) the influence according to the Theory of Second Order is approximately gathered in a mean hydrostatic tensile in-plane force,
3 Sandwich Beams with or Without Interlayer Slip
Sandwich structures are commonly defined as three-layer type constructions consisting of two thin face layers of high-strength material attached to a moderately thick core layer of low strength and density. Effects of interlayer slip have been discussed for elastic bonding by Hoischen [4] and Goodman and Popov [6], and for more general interlayer slip laws by Murakami [9]. Heuer [10] presents complete analogies between various models of viscoelastic sandwich structures, even with or without interlayer slip, with homogenized single layer structures of effective parameters.
Figure 1 shows the free-body diagram of a three-layer beam. The kinematic assumptions according to the first order shear-deformation theory are applied to each layer. For symmetrically three-layer beams with perfect bonds the following assumptions are made:
-
1.
The thin faces of high strength material are rigid in shear
-
2.
The individual bending stiffness of the faces are not neglected
-
3.
The bending stiffness of the core is neglected

Geometry and stress resultants of a laterally loaded symmetric three-layer beam
Alternatively, for sandwich beams with viscoelastic interlayer slip, see [7], the classical assumption of all three layers to be rigid in shear is made, with the shear traction in the physical interfaces of vanishing thickness being proportional to the displacement jumps with a viscoelastic interface stiffness understood. In case of elastic interface stiffness the corresponding equation of motion finally reads
The shear coefficient in (12) is either proportional to the core’s shear modulus G 2 in the case of perfectly bonded interfaces, cf. [10],
or, for the symmetric three-layer beam with elastic interlayer slip, it becomes proportional to the elastic stiffness k when common to both physical interfaces
4 Fractional Viscoelastic Single Layer
4.1 Governing Equations
Considering a single damping layer the following section introduces the initial-boundary value problem of the fractional visco-elastic Euler-Bernoulli beam. Let E(t) and D(t) the relaxation and the creep function, respectively. E(t) can be interpreted as the stress history for a unit strain \(\varepsilon (t) = U(t)\), and D(t) represents the strain history for a unit stress σ(t) = U(t), (U(t) being the unit step function). At the beginning of the last century Nutting [13] observed that E(t) is well suited by a power law decay,
where Γ(. ) is the Euler-Gamma function, \(c_{\beta }/\varGamma (1-\beta )\) and β are characteristic coefficients depending on the material at hand. Once E(t) is determined in the form according to Eq. (15) the function D(t) is given as
Due to Boltzmann superposition principle the stress and strain history may be de-rived in the form of convolution integrals
that are valid if the system starts at rest, t = 0, otherwise \(E(t)\varepsilon (0)\) and D(t)σ(0) have to be added, respectively. Thus, combining Eqs. (15) and (16) with (17), leads to
where the symbol \(\left (_{C}D_{{0}^{+}}^{\beta }\varepsilon \right )(t)\) is the Caputos fractional derivative defined as, compare [4],
while \(\left (D_{{0}^{+}}^{-\beta }\sigma \right )(t)\) is the Riemann-Liouville fractional integral defined as
From Eqs. (19) and (20) we may recognize that for β = 0 and β = 1 the purely elastic and viscous fluid behavior is recovered, respectively.
Consider an isotropic homogeneous Bernoulli-Euler beam of length L that exhibits spatially distributed fractional viscoelasticity, the corresponding equation of motion reads, compare [14],
where ρ(x) is the mass per unit length and I y (x) is the moment of inertia of the cross section with respect to the y-axis. The constitutive law for the bending moment is of the form
4.2 Example Problem
Let us suppose that the loading function varies in such a slow way that the inertial forces may be neglected. In this case the first term at the left hand side of Eq. (21) or Eq. (20) may be cancelled.
The example problem under consideration is a clamped-simply supported beam with an external bending moment M(t) = M B U(t), at the hinged support x = L. For simplicity’s sake we suppose that \(I_{y}(x) = I_{y} = const\). In this case the boundary value problem simplifies to
The closed-form solution for the quasi-static deflection becomes,
and furthermore, the bending moment is determined as
which coincides with the bending moment distribution evaluated in the purely elastic case, while displacements may be simply obtained from the elastic ones. That means that the first version of “correspondence principle” holds also for the fractional constitutive law.
References
Reddy, J.N.: A simple higher-order theory for laminated composite plates. J. Appl. Mech. 51, 745–752 (1984)
Irschik, H.: On vibrations of layered beams and plates. ZAMM 73, T34–T45 (1993)
Reddy, J.N.: An evaluation of equivalent-single-layer and layerwise theories of composite laminates. Comput. Struct. 25, 21–35 (1993)
Hoischen, A.: Verbundträger mit elastischer und unterbrochener Verdübelung. Bauingenieur 29, 241–244 (1954)
Pischl, R.: Ein Beitrag zur Berechnung hölzener Biegeträger. Bauingenieur 43, 448–451 (1968)
Goodman, J.R., Popov, E.P.: Layered beam systems with interlayer slip. J. Struct. Div. ASCE 94, 2535–2547 (1968)
Adam, C., Heuer, R., Raue, A., Ziegler, F.: Thermally induced vibrations of composite beams with interlayer slip. J. Therm. Stress. 23, 747–772 (2000)
Heuer, R., Adam, C.: Piezoelectric vibrations of composite beams with interlayer slip. Acta Mech. 140, 247–263 (2000)
Murakami, H.: A laminated beam theory with interlayer slip. J. Appl. Mech. 51, 551–559 (1984)
Heuer, R.: A correspondence for the analysis of sandwich beams with or without interlayer slip. Mech. Adv. Mater. Struct. 11, 425–432 (2004)
Heuer, R., Adam, C., Ziegler, F.: Sandwich panels with interlayer slip subjected to thermal loads. J. Thermal Stress. 26, 1185–1192 (2003)
Heuer, R.: Large flexural vibrations of thermally stressed layered shallow shells. Nonlinear Dyn. 5, 25–38 (1994)
Nutting, P.G.: A new general law deformation. J. Frankl. Inst. 191, 678–685 (1921)
Di Paola, M., Heuer, R., Pirrotta, A.: Mechanical behavior of fractional visco-elastic beams. In: Eberhardsteiner, J., Böhm, H.J., Rammerstorfer, F.G. (eds.) CD-ROM Proceedings of the 6th European Congress on Computational Methods in Applied Sciences and Engineering (ECCOMAS 2012), Paper No. 2104, 10–14 Sept 2012, Vienna University of Technology, Vienna. ISBN:978-3-9502481-9-7
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2014 Springer-Verlag Wien
About this chapter
Cite this chapter
Heuer, R. (2014). On Equivalences in the Dynamic Analysis of Layered Structures. In: Belyaev, A., Irschik, H., Krommer, M. (eds) Mechanics and Model-Based Control of Advanced Engineering Systems. Springer, Vienna. https://doi.org/10.1007/978-3-7091-1571-8_17
Download citation
DOI: https://doi.org/10.1007/978-3-7091-1571-8_17
Published:
Publisher Name: Springer, Vienna
Print ISBN: 978-3-7091-1570-1
Online ISBN: 978-3-7091-1571-8
eBook Packages: EngineeringEngineering (R0)