
Abstract
This chapter discusses disruptions in tokamaks. Disruptions are a rapid loss of the confined plasma and its current. Their consequences include large heat and mechanical loads on structures surrounding the plasma, and in some cases the generation of a very high energy runaway electron beam carrying a substantial fraction of the original plasma current. These consequences become worse in larger tokamaks, which have higher currents and magnetic fields, and are therefore a major design constraint. After outlining the physics of disruptions, this chapter discusses the methods used to detect impending disruptions, means to avoid the disruptions and ways to mitigate the consequences if a disruption is unavoidable. This is an intensely studied topic and means to detect and mitigate a very high percentage of disruptions are becoming increasingly well developed.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others
Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
7.1 Introduction
Disruptions in the tokamak are a rapid loss of the confined plasma and its current, with consequent heat loads to the plasma facing walls and electromagnetic forces on the device structure. The energy stored in a tokamak plasma rises roughly as L 5 (where L = the linear dimension) [1], so the energy dissipated at the wall in a disruption rises approximately as L 3. Therefore doubling the size of the tokamak (e.g. the step from JET to ITER) increases the wall load at disruption by an order of magnitude (if it is spread uniformly). Likewise, for a given twist of the edge magnetic field (its safety factor), the electromagnetic loads at disruption rise as ~LB ϕ I p (where B ϕ = Toroidal magnetic field and I p is the plasma current). Since I p ~ LB ϕ (at a given edge safety factor) the EM load ~\( {L^2B_{\phi}}^2\) and so typically increases approximately as ~L 3 (since empirically in tokamaks the toroidal field in general rises slightly slower than linearly with size). The result is that disruptions are a major constraint in the design of large tokamaks such as ITER and will be for fusion power plants based on the tokamak. Further, means to avoid, control and mitigate the consequences of disruption are essential in tokamaks of the scale of JET and larger.
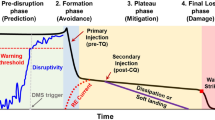
Present day (and future) tokamak plasmas have a D-shaped cross section, which has been found to improve plasma confinement and stability (for a given edge safety factor). The vertical elongation of the plasma means it is unstable to vertical perturbations and must be held in-place by a control system. Failure of this control system due a large and rapid change of plasma parameters, hardware failure or programming error results in the plasma moving upwards or downwards—this is known as a Vertical Displacement Event (VDE). As the plasma moves and hits the wall eventually a disruption is triggered and the plasma energy and current are rapidly lost. Alternatively a disruption may occur and the rapid change of plasma parameters then triggers a vertical instability. Disruptions (as opposed to VDEs) most usually result from some form of macroscopic plasma instability, which may be initiated by operating too close to a stability limit, by a control system error or by some foreign material falling into the plasma. The accepted sequence of events in a canonical disruption is shown in Fig. 7.1.

Sequence of events leading to a canonical disruption
There are of course many exceptions to this picture. A disruption in JET is shown in Fig. 7.2, and illustrates a case with a collapse of the thermal energy on O(1) ms and the quenching of the current on O(10) ms. The plasma centroid moves upwards as the vertical control of the plasma is lost, following the thermal quench.

The plasma current decay (I p ) in a JET disruption follows a more rapid loss of the plasma energy, illustrated by the central electron temperature (T e (0)) behaviour. A growing helical distortion of the plasma measured by B r (n = 1) is followed by the energy loss, with resulting loss of control and upward movement of the plasma current centroid (Z c )
The key issues arise from the resultant effects of the disruption:
-
A rapid heat loss to the walls—in a high performance ITER plasma the 350 MJ of plasma thermal energy will be lost in around 1 ms [2].
-
Large forces on the conducting structure containing plasma, due to induced eddy currents as the plasma current decays in the disruption and also due to currents with part of their circuit in the plasma, and part in the wall (known as halo currents). These currents can result in forces of approaching 8,000 tonnes on the ITER vacuum vessel [3].
-
Runaway electrons induced by the large toroidal electric field due to the rapid decay of the plasma current in a disruption—in ITER it is predicted around 10 MA might be carried by 10–20 MeV electrons [4], with consequent potential for damage as these high energy electrons hit the wall.
In the remainder of this chapter the causes and consequences of disruptions are reviewed in more detail, then methods to detect impending disruptions are discussed which can be used to avoid the disruption or apply mitigating actions, as examined in the latter sections of this chapter.
7.2 Causes of Disruptions
As discussed above disruptions may be due to operating too close to a stability limit, or may be due to loss of control, or because some material falls into the plasma. In this section the main stability limits, which when exceeded can lead to disruptive plasma instabilities are discussed. Also the VDE is examined in more detail in this section.
7.2.1 Performance Stability Limits
In the tokamak the main controlled quantities are the toroidal field (B ϕ ), the plasma current (I p ), the plasma density (n e , electron density), the applied additional heating power and the plasma shape. The additional heating may be from high energy injected neutral particles (typically deuterium) or radio frequency waves that resonate with the ion or electron gyro-frequencies. The additional heating directly controls the plasma temperature (and thus the kinetic pressure of the plasma), and the heating mix can influence the pressure profile within the plasma. MHD stability imposes limits on normalised quantities—an MHD equilibrium is defined by the safety factor which measures the twist of the field lines, q (see Chap. 2), the pressure profile, the ratio of thermal to magnetic pressure, β (see Chap. 2), and the plasma shape. There is a hard limit imposed by ideal external kink modes, which are unstable for edge-q < 2. In diverted tokamaks the edge-q is ∞ but the value of q at 95 % of the edge poloidal flux, q 95 , has been found to be a good proxy for the edge-q limit (i.e. the limit is q 95 ~ 2). Likewise there is a limit on β due to ideal pressure driven external kink modes (see Chap. 2), or due to internal m = 2, n = 1 neo-classical tearing modes (see Chap. 8). As discussed in Chap. 2 there is also an empirical limit on the density in the tokamak, known as the Murakami [5], Hugill [6] or Greenwald limit [7]. This limit is associated with the increased radiation that occurs at higher density, which has been interpreted as leading to an inward contraction of the temperature profile [8] and/or radiative destabilisation of magnetic islands [9]—this class of disruptions is sometimes known as Edge Cooling Disruptions. The empirical Greenwald density limit (n G ) is [7]:
where the density (n e ) is the line average value and a is the plasma minor radius. Since approximately
where quantities are in MKS units and κ is plasma elongation. Combining (7.1) and (7.2) gives
which is the form of the density limit proposed by Murakami and by Hugill. An examination of JET disruptions shows substantially increased disruptivity at, and beyond, the density limit and at q95 = 2 (Fig. 7.3)

Statistics from JET for the operational period from 2000 to 2007. The contour plot shows the disruptivity (s−1) as function of the inverse edge safety factor (1/q 95 ) and the normalised plasma density (n e ). The inverse of the disruptivity is the time (statistically) to disruption for the given parameters (q 95 and n e ) and is derived by sampling the plasma state every 250 ms (when the plasma current is above 1 MA). In total, more than 15,000 plasma discharges were sampled. The broken lines are the expected stability limits (see text) and solid black lines enclose regions where the disruptivity >0.04 s−1 From [10]
In practice the hard limit at q 95 ~ 2, where a very fast growing instability on the Alfven timescale occurs, manifests itself as a slower growing m = 2, n = 1 tearing mode at slightly higher edge-q (see Chap. 2 for details on tearing modes). Likewise the density limit also tends to manifest itself in the destabilisation of an m = 2, n = 1 tearing mode. These tearing modes rotate with the plasma electron fluid, but in larger tokamaks tend to stop rotating as they grow towards the disruption event. This cessation of rotation is termed mode locking [11] and the primary force slowing the plasma (and mode) arises from eddy currents driven in the conducting structures surrounding the plasma by the rotating instability.
The manifestation of the β-limit is more varied. Typically in the ELMy H-mode, the envisaged baseline operating mode for ITER, m = 2, n = 1 neo-classical tearing modes (NTMs) are triggered at sufficiently high β (see Chap. 8). These NTMs may, or may not, grow to sufficient amplitude to cause a disruption. In more advanced operational scenarios an internal transport barrier [12] may occur, with strong peaking of the pressure profile which can drive Alfvénic growth rate instabilities, which very rapidly lead to disruption (see for example [13]). Finally at high plasma pressure resistive wall modes may occur (see Chap. 6) that can cause disruptions.
7.2.2 VDEs
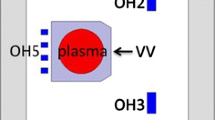
The elongation of present day tokamak plasmas for stability and confinement reasons means that they are vertically unstable and must be position controlled by a feedback system (see Sect. 7.3.2). Passively the surrounding conducting structures slow the motion of plasma to a timescale related to their resistive skin time, making feedback control possible. A disruption results in rapid large changes in plasma parameters, which almost invariably cause the vertical feedback control to be lost. Alternatively other large disturbances (e.g. large edge instabilities know as ELMs) may cause loss of vertical control, or some hardware failure or programming error may cause loss of control. Figure 7.4 shows an example from Alcator C-Mod in which a disruption leads a vertically unstable plasma that moves downwards. At later times halo currents indicated by the arrows flow (see next section).

Magnetic flux reconstructions at 1 ms intervals during a disruption and subsequent vertical displacement in Alcator C-Mod. The arrows show the poloidal projection of halo current flow. The halo circuit in the plasma scrape off layer actually follows a helical path, in order to be force free [14]
In general the non-symmetries in the single x-point magnetic geometry (as shown in Fig. 7.4) mean the plasma has a higher probability of moving upwards or downwards, depending on details of the magnetic configuration, in a VDE.
7.3 Consequences of Disruptions
7.3.1 Heat Loads
Heat loads arise when the thermal energy is lost from the plasma (thermal quench) and during the current quench phase, as the magnetic energy is converted to heat energy. Since the heating of a material surface by the incident energy (U) is thermally conducted into the structure, the governing parameter for the surface heating is U/(A × τ 0.5 ), where A is the area and τ is the timescale of deposit. If all the thermal energy of a high performance ITER plasma is conducted to the divertor during a disruption then this would result in a very significant thermal load to the divertor [3]. However, there are several mitigating factors:
-
In most tokamak disruptions the thermal energy content of the plasma, at the time of the thermal quench, is substantially lower than its peak value [15]. However there are exceptions such as disruptions at high-β where there is essentially no loss of confinement before the disruption.
-
Some of the thermal quench energy is lost by radiation; exactly how much depends on the wall materials and thus the radiating impurities in the plasma. For example JET with a carbon wall lost around 75 % of the thermal energy radiatively, but with the new tungsten/beryllium wall this reduces to <50 % [16].
-
The width of the peripheral region of the plasma (known as the scrape-off layer) in which the heat is conducted to the divertor broadens during the thermal quench; this broadening is in the range 5 to ~20 [2].
Taking these mitigating factors into account significantly lessens the divertor disruptive heat loads, but they remain high enough that further active mitigation (see Sect. 7.6) is essential.
The magnetic energy associated with the plasma current is \( 1/2{{LI}_p}^2\) (where L is the plasma inductance). During the current quench phase the majority of this magnetic energy is converted into heat by Ohmic heating in the highly resistive plasma. Some the original magnetic energy is inductively coupled into the vacuum vessel and coils. Typically in JET around 80 % of the magnetic energy is consumed in Ohmically heating the plasma [17]. The majority of this thermal energy is then radiated to the walls—since radiation gives a fairly uniform spreading of the heat loads it is the most desirable means of dissipating the plasma energy.
7.3.2 Eddy Currents, Halo Currents and Forces
Vertical instability occurs because an upwards (or downwards) displacement of the plasma (ξ) from its equilibrium position produces a Lorentz force
where z is the coordinate in the vertical direction, B R,ext and B Z,ext are the radial and vertical magnetic field produced by the coils external to the plasma, and n v (known as the field index) is defined as
Here the fact has been used that the external fields are in vacuum (\( \vec{J} \) = 0) and so dB R,ext /dz = dB z,ext /dR. Since the radial force on the plasma must be inwards to counter the force that wants to expand the plasma ‘hoop’, we have I p B z,ext < 0. Therefore the condition for vertical instability is n v < 0 (see Fig. 7.5), since in that case an upwards motion of the plasma (ξ > 0) gives F z > 0 and the motion is reinforced (i.e. instability). The neutrally stable (n v = 0) plasma has a ‘natural’ elongation that increases as the aspect ratio decreases [18]. For n v < 0 the plasma elongation is increased because the external field corresponds to coil currents above/below the plasma ‘pulling’ on it vertically and/or by coils nearer the mid-plane ‘squeezing’ the plasma horizontally.

Shape of the external magnetic field for positive and negative field indices
As a vertically unstable plasma moves it must be instantaneously in force balance—normally the inertia of the plasma plays no role in this force balance and the balancing force arises from currents flowing in vacuum vessel, and other structures, surrounding the plasma. These vessel currents may be eddy currents driven by the movement of the plasma (or changes in the plasma current magnitude) and/or halo currents that flow partly in the plasma periphery and partly in the vacuum vessel.
An example of halo current flow is shown in Fig. 7.4. Halo currents may have a toroidally asymmetric component as observed in many tokamaks (see for example [2, 19–21]). The toroidally symmetric component of the halo current is driven through conservation of poloidal and toroidal magnetic flux. In the plasma, which generally has low β by the time halo currents are established, the halo current flow will be parallel to the magnetic field. Between 2 footpoints where a halo field line intercepts the vacuum vessel structure the conservation of poloidal flux drives the halo current in the Ip direction and toroidal flux conservation drives a poloidal current whose toroidal field is in the same direction as the existing field. Such descriptions of halo currents have been very successful in describing the toroidally symmetric results [22].
The asymmetric halo current has a predominantly n = 1 character (where n is the toroidal mode number); this is most easily seen if the halo current rotates, but can also be observed by measurements at several toroidal angles (see for example [19]). Empirically the asymmetric halo current is quantified by the Toroidal Peaking Factor
Figure 7.6 shows the relationship between TPF and halo fraction for a wide range of tokamaks. The data are bounded by TPF × (I h,max /I p0 ) = 0.7, where I p0 is the plasma current just before disruption

Data on the halo current asymmetry, quantified by the parameter TPF, for the tokamaks Alcator C-Mod, COMPASS-D, ASDEX Upgrade, MAST, DIII-D, JET and JT60-U [23]. (Copyright IAEA, reproduced with permission from the proceedings of the International Atomic Energy Agency, 20th IAEA Fusion Energy Conference 2004, 1st–6th November 2004, Vilamoura, Portugal, IAEA, Vienna (2005))
The origin of the asymmetric halo currents is not fully resolved. In most models the asymmetry originates due to an external kink mode triggered by the reduction in edge-q as the plasma area shrinks faster than the plasma current decreases (q edge ∝ Area/I p ). In one model it is noted that helical edge currents flow in a kink mode [24], and since the plasma intercepts the wall they will have part of their path in wall (these currents have been termed Hiro currents). Alternatively 3D nonlinear modelling results attribute the halo current asymmetry to the vertical plasma position asymmetry [25].
7.3.3 Runaway Electrons
At disruption the low plasma electron temperature (T e ) and large influx of impurities which can increase the effective charge, Z eff (though at such low temperatures some impurities are only partially ionised), leads to a high plasma resistivity (η)
and so from Ohm’s law a large electric field occurs, E = ηJ, where J is the plasma current density. When E > E D , the so called Driecer electric field [26], then the thermalised electrons will accelerate to reach runaway energies of 10–20 MeV. Also if the thermal decay of the plasma is sufficiently fast that the electrons cannot relax to a thermal distribution, then the ‘hot-tail’ can give rise to enhanced runaway electron generation [27]. It is observed that up to around two-thirds of the original plasma current can be carried by runaway electrons during a disruption. Such behaviour is sometimes observed in JET (Fig. 7.7).

JET pulse showing the formation of a runaway current plateau following a disruption. The plateau forms as the plasma moves down towards the divertor region in the bottom of the machine. As the runaway electron beam hits the machine structure hard X-rays are emitted. From [28]
In large tokamaks (around JET size and beyond) the formation of secondary runaways by close angle collisions in which the runaway electrons transfer a substantial fraction of their momentum to a slow electron is a key effect [29]. This process leads to exponential growth of the runaway population and in ITER for example many e-foldings are possible.
Disruption generated runaways have caused damage in tokamaks including Tore Supra [30, 31], and JET [31]. Not only is the thermal energy of the runaway electrons deposited in the material surface they strike, but also a fraction of the magnetic energy associated with the runway beam can be converted and deposited as thermal energy [32]. Runaway electrons are thus a significant issue for future large tokamaks and methods for their control will be discussed in Sect. 7.6.
7.4 Detection of Disruptions
The detection of an impending disruption with adequate warning time is obviously key to any disruption control or avoidance scheme. In ITER detection and mitigation of a very high percentage of disruptions is needed. Most present larger tokamaks use an empirical mixture of signals to indicate an impending disruption, allowing appropriate action to be taken. In JET for example a detection threshold is routinely set on the n = 1 locked mode amplitude—the control action taken when the threshold locked mode amplitude is exceeded is to reduce the plasma current and plasma elongation, both of which reduce the disruption forces. Also in JET the ITER-like wall, with beryllium plasma facing layers in the main chamber, has led to the use of real time protection based on infra-red imaging of surfaces, and a safe pulse termination system [33]. In ASDEX Upgrade the present system is based on detection of locked modes and loss of plasma vertical position control—either of which trigger a massive gas injection valve (see Sect. 7.6).
Given the underlying complexity and variety of disruptions it is unlikely that they can be predicted with high reliability by tracking a small number of quantities. As discussed in the remainder of this section more sophisticated learning based methods have been developed to predict disruptions, which to some extent provide a more systematic basis for determining the key measured inputs to reliably predict disruptions. As will be seen further developments are still needed to predict disruptions with adequate reliability and robustness (to changing operational regimes).
7.4.1 Artificial Neural Networks
Artificial neural networks (NNs) have been used extensively to predict disruptions in tokamaks. In most applications a multi-layer perceptron network has been used (Fig. 7.8). This consists of an input layer where the signals (often normalised) are taken from the tokamak, one, or more, layers of hidden neurons and an output layer. In most applications of disruption prediction there is a single output, which might for example be the predicted time to disruption.

Schematic of a multi-layer perceptron neural network
The network is trained on a set of data to find the connection weights that minimise the prediction error—further details on neural networks can be found for example in [34].
One of the first applications of NNs to the prediction of a disruption was on the TEXT tokamak [35]. In this the measured poloidal magnetic field (Mirnov) fluctuations were used to their predict future behaviour more than 1 ms in advance. In later work it was found that superior results were obtained by predicting the future behaviour of a soft X-ray line passing through the plasma core [36]. This approach was extended on ADITYA tokamak [37] using 4 Mirnov signals, a central SXR signal and a Balmer α signal (Hα). The results showed it was possible to predict behaviour up to 8 ms in advance.
On the DIII-D tokamak 33 input signals were used to train a NN to predict the normalised β N (=β/(I p (MA)/a(m) B ϕ (T))) at disruption [38]. This network was trained on 56 β-limit disruptions and tested against 28 other disruptive pulses. A measure of the success for disruption prediction is the probability of true positive detections of a disruptions versus the probability of false positive detections—obviously the aim is maximise the true positive detections and minimise the number of false detections. From Fig. 7.9 it can be seen that the around 90 % of disruptions can be correctly predicted with an accompanying false positive rate of about 20 % by the NN in this DIII-D example.

Variation of the probability of a correct detection of disruption versus the probability of false alarm for the test set of data. The implicit variable is the detection β N threshold which as it is lowered increases the probability of a correct detection but also increases the false positives. Results are shown from the neural network (NN), and also from theoretically based formulae for the limit (labelled β N and β N /l i ). See [38] for details
In the JT-60U tokamak NNs have been used to predict disruptions caused by the density limit, ramp down of the plasma current, locked modes caused by low density and β-limit disruptions [39]. The JT-60U NN predicted the stability level, defined as 1 for a highly stable plasma and 0 at disruption, from 9 input parameters. The NN is trained in 2 steps—in the first step a guess is used for the stability level as the disruption is approached, and the output stability level is used in the second step to retrain the NN. In addition further training data is introduced in the second step and iteratively adjusted to maximise the NN performance. Excluding β-limit disruptions the NN achieved 97–98 % prediction rate 10 ms before the disruption (and >90 % 30 ms before) with a false positive rate of just 2.1 % for non-disruptive pulses; this testing was done on data from 9 years of operation (1991–1999). However, β-limit disruptions, which generally lacked clear precursors, were less successfully predicted—this was improved by training a sub-NN to predict the β N -limit, which is then treated as an input for main stability level NN [40].
In JET there has been a lot of work on disruption prediction with NNs starting in the 1990s [41]. More recently a multi-layer perceptron NN has been trained on 86 disruptive pulses and 400 successful pulses [42]. For the disruptive pulses the training was on the 400 ms preceding the disruption and for successful pulses for a randomly selected 400 ms. Nine inputs of global plasma and machine parameters were used at input to the network; a saliency analysis showed the most important input parameters are I p , the total input power, the plasma internal inductance (li), q 95 and the poloidal beta (β p ). The network target for disruptive pulses was a function that varied from a value of 0 at 400 ms before the disruption and a value of 1 at the disruption. For successful pulses the network target is 0. Table 7.1 shows the performance of this network in terms of missed alarms (MA) in disruptive pulses and false alarms (FA) in successful pulses. In addition to the training set of pulses, a validation set, to ensure the NN does not over-train, and a test set of pulses are reported in Table 7.1.
The threshold level is set with a bias to avoiding false alarms, which accounts for their low %. It can be seen that within the test set 84 % of disruptions are successfully predicted 100 ms in advance. A deficiency of the NN approach is that when it is applied outside the domain of its training that it rapidly deteriorates in performance [43]. In the case of the JET NN discussed above, when applied to the whole pulse the number of false alarms increased considerably; rather than train the NN on the whole pulse, which would be computionally costly, a clustering procedure based on Self Organising Maps (SOM) [44] was adopted, to select significant representative samples for the training [45]. A SOM is a form of NN that maps muti-dimensional spaces to 2-D space, such that it clusters similar behaviours. In the application discussed in [45] the training data is divided into samples near disruption (disrupted samples), non-disruptive samples well away from disruption, and intermediate transition samples. Since the transition region is not well defined these samples are not used in the training of the disruption prediction NN. A 100 ms before the disruption this NN successfully predicted 77 % of disruptions and had 1 % of false alarms; these results were on a test set data from a JET campaign that occurred 15 months before the training set data was obtained.
Neural Networks have also been extensively developed on the ASDEX Upgrade tokamak. A NN was invoked in real time to trigger injection of frozen deuterium pellets [46]; so called killer pellets that mitigate the effect of the disruption (this is discussed further in Sect. 7.6). This NN was trained on data from 99 disruptive discharges and 386 non-disruptive discharges. The input to the network was either binary quantities such locked mode (input = 1) or no locked mode (input = 0), or normalised physics quantities such as q95, and their time derivatives. Figure 7.10 shows an off-line validation of the network for a density limit disruption, where the network output is the time to disruption, which in training is taken to have a maximum value of 0.8 s.

Network prediction for a density limit disruption in ASDEX Upgrade. The alarm threshold is reached 20 ms before the disruption. From [46], copyright 2003 by the American Nuclear Society, La Grange Park, Illinois
In online use 79 % of disruptions (of the types in the training set) were recognised. The network was set to trigger the pellet injector if a disruption was detected in 88 discharges, and in 10 of these the killer pellet was injected to ameliorate the disruption effects.
In subsequent studies on ASDEX Upgrade a self organising map (as discussed above for JET) has been used to select the NN training samples [47]. This network successfully detected about 82 % of disruptions in a test set belonging to the same experimental campaign as the training set. However, when a later set of campaigns is used the success rate drops to 64 %. The use of an adaptive predictor in which missed disruptions are added to the training set, and the NN retrained, restored the success rate to over 80 %.
The above examples highlight one deficiency of NNs—they perform poorly when applied outside their training domain. A second problem is that they require a training set of disruptions, which are increasingly undesirable on larger tokamaks. A possibility is to train using data from a different tokamak and this was explored in [48] for training and application between ASDEX Upgrade and JET. To achieve this cross-training normalised plasma variables must be used; the chosen parameters were q 95 , β N , l i , n e /n G , τ E /< τ E > , and locked mode indicator that switches rapidly from 0 (no locked mode) to 1 (locked mode)—τ E is the energy confinement time and \( \langle \rangle \) denotes an average over the dataset (separately for JET and ASDEX Upgrade). To apply the training data on ASDEX Upgrade to JET (or vice versa) a scaling for time is needed. A minor radius squared, a 2, scaling of time was explored on the basis that this is how the resistive diffusion time scales. Figure 7.11 shows results for a single layer network trained on ASDEX Upgrade and applied to JET. The NN predicts the time to disruption and implicitly the threshold time to disruption is varied along the curves in Fig. 7.11. In JET an early failure was defined as where a disruption was predicted to occur >0.1 s in advance of the actual event and a late failure was when it is predicted <0.01 s in advance (deemed to be too little time to take mitigating actions). Figure 7.11 also shows, as would be expected, that the NN does substantially better on ASDEX Upgrade data.

Performance of a NN trained on ASDEX Upgrade and applied to JET. Also shown is the performance of the network on ASDEX Upgrade. From [48]
In summary artificial neural networks are the most thoroughly explored option for disruption detection, but in general their performance is not sufficient to capture nearly all disruptions, as will be required on future large tokamaks. They also have the deficiencies of needing training data and not working well outside their training domain. Hence attention is increasingly focussing on other methods of disruption prediction.
7.4.2 Other Methods
Although neural networks are the most explored method of disruption prediction, other methods have been explored including fuzzy logic [49], classifiers known as Support Vector Machines (SVM) [50], discriminant analysis [51] and multiple threshold tests [52].
The fuzzy logic differs from NNs in that the rules for classifying a disruptive pulse are explicit and can be used to develop additional physics insight. The implementation on JET [49] predicted the probability of a disruption, using 12 inputs and 36 logic based rules. The input variables are classified into between 3 and 5 membership classes—so for example locked mode amplitude is classified as low, medium or high. Likewise the output (disruption probability) is classified into 5 categories between low and high. 36 logic rules were then applied—an example is ‘If I p is low and locked mode amplitude is high then the output (disruption probability) is high’. These rules can reflect empirical understanding, but the rules and the categorisation of the input variables are optimised using training data of disruptive and non-disruptive pulses. Taking a threshold probability of 0.45 for a disruption alarm and testing on 292 disruptive pulses it was found that 7.9 % of disruptions were missed, while testing of 385 non-disruptive pulses showed 17.7 % of false alarms—the number of false alarms is reduced by increasing the threshold but at the expense of increasing the number of missed disruptions.
The SVM classifier method has been applied on JET [50, 53]. The particular implementation is called APODIS (Advanced Predictor Of DISruptions). APODIS is used to classify whether a pulse state is disruptive or non-disruptive and does this through the entire duration of the pulse. APODIS has two main novelties in relation to other predictors. The first one reflects the fact that APODIS uses a special combination of SVM classifiers with the classifiers distributed into a two layer architecture. The first layer of classifiers (3 in the present version) operate in parallel on consecutive time windows that are 32 ms long. Their respective predictions are combined by the second layer classifier, whose output is the APODIS decision function and establishes whether or not to trigger a disruption alarm. The second main novelty of APODIS is the use of features from both the time and frequency domains. In the time domain the mean values of the signals every 32 ms are used, while in the frequency domain the standard deviation of the power spectrum (after removing the DC component) is used every 32 ms [54]. APODIS has been installed in the JET real-time network [55]. The training was based on 100 non-disruptive discharges and 125 disruptive discharges from JET in carbon wall operation, and required the use of multicore high performance computers. The best predictor was selected from several sets of 100 non-disruptive discharges and 125 disruptive discharges. These sets were randomly chosen from a total number of 4070 non-disruptive and 246 disruptive discharges. The utility of the classifier method was demonstrated by testing on JET ITER-like Wall pulses and was very successful (Table 7.2). An important point is an average warning time for an impending disruption of 426 ms was achieved.
An assessment of how many disruptive discharges are necessary to train the APODIS predictor from scratch has been made; this is an important issue because only a small number of disruptions are acceptable for ITER or DEMO, and so assembling a large training data set is not possible. An adaptive APODIS predictor has been trained in an adaptive way from the first disruption of JET operating with its new metallic wall. The results show that 42 disruptions are necessary to achieve success rates of 93.8 % and false alarm rates of 2.8 % [56]; these rates have been determined from 1036 non-disruptive discharges and 201 disruptive discharges.
Allied to the APODIS approach a clustering method to identify the type of disruption (density limit, neo-classical tearing mode, auxiliary power shut-down etc.) is being developed [57]. This method is based on the geodesic distance on a probabilistic Gaussian manifold, that allows error bars on measurement to be taken into account. The overall success in classifying 795 JET disruptions is 85 % (it has to be remembered that the classification by human experts is not always unambiguous). Once a disruption is predicted then such a classification of the disruption type will allow targeted mitigating actions to be taken.
The discriminant analysis technique was applied to edge cooling disruptions (see Sect. 7.2.1) in ASDEX Upgrade [51]. A separation of disruptive and non-disruptive pulses is given by
where P frac is the fraction of radiated to total input power and U′loop is the loop voltage (with 4.8 added to avoid negative values). When the left-hand side of 7.7 exceeds 1.04 a disruption alarm is generated. This equation gives insight into the causes of edge cooling disruptions, so for example during the edge cooling the current profile contracts raising li. In practice a probability function is used to give the likelihood that a disruption will occur [51]. Testing of this discriminant method showed about 80 % of disruptions can be detected 20 ms in advance, allowing adequate time for mitigating actions.
On NSTX a disruption detection system has been developed by combining thresholds for direct instability detection (vertical motion, stationary and rotating n = 1 instabilities), equilibrium features (profile shapes, wall gaps), and transport indicators (e.g. plasma rotation, energy and particle confinement). Based on an analysis of the NSTX disruption database the coefficients used in the detection algorithm are chosen to minimise the total failure rate (defined as the sum of false positives, late warnings (<10 ms before the disruption), and missed warnings). Tests show the total failure rate can be as low as 6.5 % when applied to a set of around 2000 disruptions [52]. This method has the advantage that an underlying physics cause, for the disruption, can be attributed, unlike with neural networks.
7.4.3 Remaining Issues
All the methods of disruption prediction that have been discussed rely on a training dataset, and with the exception of the study in [48], this training dataset has come from the tokamak for which the prediction is being made. Since in tokamaks of ITER scale disruptions are highly undesirable and have to be predicted with a high level accuracy, assembling a training set is challenging. It is desirable that further exploration of machine independent disruption predictors occurs and that means to minimise the size of the disruption training set are further explored. An option that could be explored is real-time prediction of the plasma stability—this would either be a direct calculation from first principles of the plasma stability (as discussed in [58]) or could be an MHD spectroscopy technique [59]. The MHD spectroscopy technique has been most applied to high frequency Alfven Eigenmodes (see Chap. 9 and [60]), but also to diagnosing the proximity to resistive wall mode instability (see Chap. 6 and [61]). In this technique an external magnetic field which has components of the MHD eigenmode whose stability is being examined is applied and typically the frequency is scanned across the expected frequency of the natural instability. If the plasma is close to instability then the applied field is amplified and the proximity to instability can be determined by the degree of amplification. This approach has been used to monitor the stability of a disruption causing instability [62], but much more development is warranted. Overall, significant progress in methods to predict disruptions has been achieved but the rigorous demands for future large tokamaks to be able to achieve a very high success rate in predicting disruption and the difficulties of producing training data mean this area needs further attention.
7.5 Disruption Avoidance and Control
As always prevention is better than cure, and so methods to steer the plasma discharge away from a disruption or applying a control actuator to avoid a disruption are highly desirable.
Various ways to steer away from impending disruptions have been developed, including:
-
On TEXTOR a real-time detection system was used to detect growing long wavelength instabilities and apply torque with a neutral beam to prevent mode locking [63]
-
Historically on ASDEX Upgrade detection of an impending radiative (detached) disruption was controlled by cessation of gas fuelling and an increase in applied neutral beam heating power [64]. Presently detachment is monitored through the divertor temperature and radiation [65]
-
Control of the plasma pressure using the applied heating power as an actuator has been practiced on several tokamaks (e.g. on JT-60U [66] and DIII-D [67]), as a means to avoid pressure limit disruptions.
Direct control of the instabilities that cause the disruption has been tried. On the DITE tokamak the magnetic signatures of the instabilities causing density limit disruptions were detected and used in a feedback control loop to apply external fields to reduce their amplitudes. In the case with feedback a significantly higher plasma density could be achieved before the disruption was triggered (Fig. 7.12).

Two nominally identical pulses with a magnetic feedback applied from 240 ms and b no feedback. The feedback lowers the magnetic fluctuation amplitude (dB/dt) and allows a higher density to be achieved. From [68], copyright 1990 by the American Physical Society
In another example of disruption avoidance electron cyclotron resonance heating (ECRH, whose frequency resonates with the electron gryo-frequency) was applied in the FTU [69] and ASDEX [70] tokamaks near the primary instability location (q = 2) and permitted the avoidance of disruptions in otherwise identical discharges. Similarly disruptions were avoided near an edge-q of 3 in JFT-2 M by ECRH Upgrade [71], and such results have been observed in other tokamaks.
7.6 Disruption Mitigation
If disruption avoidance or control methods fail then methods are needed to mitigate the consequences of the disruption. Primarily the peak heat loads on material surfaces and the EM disruption forces must be reduced, and a means to inhibit or safely reduce post-disruption plasma current carried by runaway electrons is needed. In order to meet design criteria in ITER the mitigation methods need to be both highly effective in reducing loads and highly reliable [72].
The most developed mitigation method involves injecting large amounts of gas (at least an order of magnitude more than the plasma content) using fast opening valves—this method is termed massive gas injection (MGI). The other primary method that has been developed is to inject cryogenic pellets of gas, which again substantially increase the plasma density. For runaway electrons other methods of mitigation have been investigated and are discussed in sub-section c below.
-
a.
MGI
In MGI experiments, the gas is delivered to the plasma by one or more fast-valves, with opening times of order 1 ms, mounted outside or inside the vessel. The distance of the valves to the plasma can vary from a few centimetres (e.g. in ASDEX Upgrade [73]) to a few metres with long delivery tubes (4 m in JET, [74]). The time-of-flight of the gas to the plasma depends on its sound speed. Often a light carrier gas (e.g. deuterium) is used to entrain the higher-Z impurity gas (e.g. Argon or Neon), which is more efficient in radiating the plasma energy. A typical example of MGI quenching an ASDEX Upgrade plasma [73] is shown in Fig. 7.13.

ASDEX Upgrade pulse with MGI triggered at 2.9 s with a valve just 10 cm from the plasma. After a short flight time for injected gas the edge electron temperature (‘edge Te’) drops and then the outer region of the plasmas cools causing a drop in the plasma thermal energy (Eth), this is followed by a rapid loss of plasma energy (as shown by the central Soft X-ray) known as the thermal quench. Magnetic instabilities measured on poloidal coil outside the plasma increase near the thermal quench time. From [73] (© IOP Publishing. Reproduced by permission of IOP Publishing. All rights reserved)
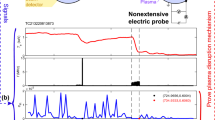
The neutral gas propagates from the valve, or flight tube, to the edge of the plasma surface and where it starts to ionise and the cooling phase commences. The neutral gas is observed to penetrate to the q = 2 surface in several tokamaks (e.g. TEXTOR [75] and Tore Supra [76]). An example of light from ArII emission for MGI in TEXTOR is shown in Fig. 7.14, where it can be seen that before the thermal quench the neutrals reach the q = 2 surface. Further studies on TEXTOR with different q = 2 radii confirmed the extent of the pre-thermal quench neutral penetration [77].

Emission from deuterium and argon MGI before the thermal quench in TEXTOR. The camera was equipped with the Ar II interference filter (λ ≈ 611 nm). The camera viewing window (solid blue line), TEXTOR inner wall (dotted blue line), the q = 2 flux surface (dotted green circle) and the plasma centre are marked in the figure. The time is relative to the MGI valve trigger [75]. (© IOP Publishing. Reproduced by permission of IOP Publishing. All rights reserved)
Studies on Tore Supra [76] also show the cooling front from the MGI reaches q = 2 before the thermal quench—it is conjectured that observed plasma instabilities eject core energy outside q = 2, thereby ionising the injected gas and preventing further penetration into the core. Data from MAST [78] indicates a pre-thermal quench build-up of electron density primarily in the vicinity of q = 2 (Fig. 7.15), though the physics underlying this is not fully understood.

Data from MAST showing a build-up of electron density near q = 2 before the thermal quench—the data is assembled from a series of repeated MGI discharges. The related electron temperature is shown in (b). The broken lines indicate the error-bars on the q = 3 and 2 locations. From [78]
The duration of this cooling phase tends to decrease with an increase in injected gas (for JET [74] and for Tore Supra [76]), but can saturate as shown in ASDEX Upgrade for larger amounts of injected gas [73]. The edge-q also affects the duration of the cooling and for example JET [74] and DIII-D [79] data show it increases with increasing edge-q.
As the cooling phase proceeds the level of macroscopic core instabilities increase, and this triggers a rapid loss of energy during the thermal quench phase. Tomographic reconstructions of radiated power show it rises rapidly in the core in the thermal quench phase [74, 80] as shown for a JET case in Fig. 7.16.

Data from JET for an argon-deuterium MGI mixture, showing contour plots of radiated power from tomographic reconstructions, which illustrate how the core radiated power increases sharply during the thermal quench (TQ) phase. From [74]
3D plasma stability computations using the NIMROD code [81] coupled to a radiation package have helped confirm the interpretation of the thermal quench phase during MGI [82]. In these MHD simulations a symmetric neutral source distributed at the plasma edge simulated the MGI. The modelling reproduces and explains the sequence of events observed experimentally: the perpendicular diffusion of the impurities into the plasma, the propagation of the cold front into the plasma and consequent current diffusion, with the resulting development of tearing modes and magnetic field stochastisation, coinciding with the TQ.
The large increase in impurities during and immediately following the TQ phase leads to a strong increase in plasma resistivity, which (as in disruptions without MGI) causes a rapid quenching of the plasma current. With the MGI the rate of current quench tends to be larger initially than in non-mitigated pulses [74].
The three aims of MGI are to reduce disruption heat loads to surrounding components, to reduce disruption EM forces and mitigate runaways. Reduction of heat loads is achieved by the MGI increasing the radiated power fraction, which spreads the heat loads more uniformly. Increases in radiated fractions with MGI have been observed inter alia on DIII-D [80], JET [74], Alcator C-Mod [83], ASDEX Upgrade [73] and MAST [84]—in general the radiated fraction rises with the atomic mass of the impurity and with the quantity of injected impurity. Direct observations on MAST using infra-red imaging confirm the reduction in heat loads in the divertor due to MGI [84]. An issue is that injection from a single valve introduces significant asymmetries into the radiated power—particularly up to and including part of the thermal quench phase [74, 80, 85, 86]. Experiments using 2 almost toroidally opposite gas valves on Alcator C-Mod show a significant reduction in asymmetry is possible during the pre-thermal quench phase [87], though modelling suggests the macroscopic instabilities that facilitate the penetration of the injected gas may lead to an underlying asymmetry effect [88].
The mitigation of EM forces with MGI is achieved by inducing a current quench in which both toroidal currents in the stabilising structures (vessel etc.) and halo currents are reduced compared to a natural disruption (see for example [74,83, 86]). This effect occurs because the MGI causes the current to decay earlier, thus avoiding a vertical instability of a plasma carrying a slow decaying toroidal current. Figure 7.17 is an example from ASDEX Upgrade showing the effect of injected neon gas on the reducing the halo current [89]—it can be seen that a factor of almost 2 reduction of the halo current can be achieved by MGI.

Effect of the injection of neon gas on the reduction of the maximum halo current through the inner and outer divertor plates as a function of the plasma current. Black and pink symbols represent mitigated and unmitigated disruptions, respectively. Triangles represent upwards or downwards VDEs. Squares represent disruptions followed by vertical instability. From [89]
The data on the suppression of runaway electrons with MGI is less satisfactory at present. For secondary runaways (see Sect. 7.3.3) a critical density (n c ) exists above which complete suppression occurs [90]—for typical parameters n c (1020 m−3) ≈ 11 E (Vm−1) [2] and this requires the plasma density is increased by around 2 orders of magnitude relative to the pre-disruption value. As yet no tokamak has approached n/n c ~ 1 using MGI. In ASDEX Upgrade values of up to 24 % of nc have been achieved [73], values of up to 15 % are reported for DIII-D in [91] and in JET less 1 % of n c has been achieved [74].
Overall MGI is a successful method for mitigation of disruption heat loads and EM forces, but its effectiveness for runaway electron mitigation has yet to be demonstrated.
-
b.
Killer pellets
An alternate scheme for disruption mitigation, that pre-dates MGI, is by the injection of frozen gas killer pellets. Experiments were conducted on several tokamaks, including Alcator C-Mod [92], ASDEX Upgrade [93], DIII-D [94] and JT-60U [95] using Neon, Argon or Deuterium pellets. As with MGI the killer pellets were successful in mitigating heat loads and halo currents, but there was a tendency to produce runaway electrons, with the clearest example being from JT-60U where in pulses with low macroscopic magnetic fluctuation levels, discharges with the current carried by runaway electrons resulted after killer pellet injection [95]. The tendency to produce runways coupled with the technological challenges of having frozen gas pellets on stand-by to fire into discharges with high reliability, led to the more intense consideration of MGI. However, MGI suffers from a low fuelling efficiency (ratio injected to assimilated gas) and so there have been further experiments on DIII-D using shattered pellets [96, 97]. Here 2 plates are used to shatter the relatively large pellet just before it enters the plasma—this avoids any risk of the pellet passing through the plasma and impacting the tokamak wall and also increases the surface area allowing more efficient ablation of the pellet.
-
c.
Other methods for runaway electron control
Two other methods have been applied to control runaways:
-
Feedback control of the runaway column position to allow time for an applied negative voltage to wind-down the plasma current (that is being by the runaway electrons)
-
Application of non-symmetric magnetic fields that cause the runaway electrons to be lost from the plasma.
The technique of position control of the runaway electron column and a slow reduction of the runaway current by applying an opposing electric field has been demonstrated on JT-60U [98] and on DIII-D [99]. Figure 7.18 shows a comparison of 2 pulses from DIII-D and illustrates the ability to achieve a controlled ramp-down of a plasma current that is carried by runaway electrons.

Post-disruption discharges with the current (top trace) carried by runaway electrons. The discharges differ primarily in whether the solenoid current (middle trace) and the induced voltage (bottom trace) are positive or negative. From [99]
The key issue with this technique is whether the post-disruption plasma, in which the plasma current is carried by runaway electrons can be position controlled—since this is unlikely to be guaranteed with sufficient reliability a back-up technique (such MGI or shattered pellets) is likely to be needed.
An alternate technique is to apply low toroidal mode number (n) fields—these fields can effect the confinement of the runaway electrons. It was observed in JT-60U that there was a correlation between n = 1 instability fluctuation amplitudes and the disruption current quench rate needed to form runaways; at higher n = 1 amplitude a higher dI p /dt is needed [100]. With fields applied using coils external to the plasma a reduction in runaway electrons has been observed in TEXTOR [101] (n = 1 and n = 2 applied fields) and in DIII-D [91] (n = 3 field).
7.7 Conclusions
Disruptions are a primary design constraint in large tokamaks. Significant progress has been made in quantifying the effects of disruptions (heat loads, halo currents and runaway electrons) allowing extrapolations to be made in designing future large tokamaks. Much of this quantification is empirical and would benefit from further development of underlying theory models to underpin the extrapolations.
A lot of the effort on disruptions concerns mitigating their consequences. Though much can be done to reduce the likelihood of a disruption, those arising from causes like flakes of material falling off the wall, or a power supply failure, can never be completely eliminated. Massive gas injection and killer pellets have both proved effective in giving the required level of mitigation of the EM-forces arising from halo currents. These techniques are also effective in reducing heat loads, though issues of toroidal asymmetries, arising from the local nature of the MGI or pellet injection, need to be fully understood. More problematic is the mitigation of runaway electrons; the surest method is raise the plasma density to such high level that the collisions inhibit secondary runaway growth—such densities have not yet been achieved. Further research is needed to understand if such high densities need to be achieved to mitigate runaways, when all the mechanisms damping runaway growth are considered. Mitigation requires reliable prediction of an impending disruption. The most developed technique to predict disruptions is the neural network, but they suffer from needing a training set of disruptions and do not work well outside the domain of their training. Ways to overcome these issues are being studied, but further developments are needed to achieve the required degree of reliability in predicting disruptions.
Overall, with continued research in this area the necessary understanding and mitigation methods to make disruptions acceptable, from the viewpoints of their frequency and consequences, for reactor scale tokamaks, looks very likely to be achieved.
References
G.F. Matthews et al., in Proceedings of the 19th International Conference on Fusion Energy, Lyon, 2002 (IAEA, Vienna, 2002). Paper EX/D1-1 http://www-pub.iaea.org/mtcd/publications/pdf/csp_019c/pdf/exd1_1.pdf
T.C. Hender et al., Chapter 3: MHD stability, operational limits and disruptions. Nucl. Fusion 47, S128 (2007)
M. Sugihara et al., Disruption scenarios, their mitigation and operation window in ITER. Nucl. Fusion 47, 337 (2007)
S. Konovalov et al., Characterization of runaway electrons in ITER, in Proceedings of the 23rd International Conference on Fusion Energy, Daejeon, 2010 (IAEA, Vienna, 2010). Paper ITR/P1-32
M. Murakami, J.D. Callen, L.A. Berry, Nucl. Fusion 16, 347 (1976)
P.E. Stott et al., Controlled Fusion and Plasma Physics, in Proceedings of the 8th European Conference, Prague, vol. 1 (European Physical Society, 1979), p. 151
M. Greenwald, Density limits in toroidal plasmas. Plasma Phys. Control. Fusion 44, R27–R80 (2002)
F.C. Schuller, Disruptions in tokamaks. Plasma Phys. Control. Fusion 37, A135–Al62 (1995)
D.A. Gates, L. Delgado-Aparicio, Origin of tokamak density limit scalings. Phys. Rev. Lett. 108, 165004 (2012)
P.C. de Vries et al., Statistical analysis of disruptions in JET. Nucl. Fusion 49, 055011 (2009)
M.F.F. Nave, J.A. Wesson, Mode locking in tokamaks. Nucl. Fusion 30, 2575 (1990)
J.W. Connor et al., A review of internal transport barrier physics for steady-state operation of tokamaks. Nucl. Fusion 44, R1 (2004)
G.T.A. Huysmans et al., MHD stability of optimized shear discharges in JET. Nucl. Fusion 39, 1489 (1999)
R.S. Granetz et al., Disruptions and halo currents in Alcator C-Mod. Nucl. Fusion 36, 545 (1996)
V. Riccardo, A. Loarte, and the JET EFDA Contributors, Timescale and magnitude of plasma thermal energy loss before and during disruptions in JET. Nucl. Fusion 45, 1427 (2005)
P.C. de Vries et al., The impact of the ITER-like wall at JET on disruptions. Plasma Phys. Control. Fusion 54, 124032 (2012)
J.I. Paley, Energy low during disruptions. Ph.D. thesis, University of London (Imperial College), 2006
Y.-K.M. Peng, D.J. Strickler, Features of spherical torus plasmas. Nucl. Fusion 26, 769 (1986)
S.P. Gerhardt, Dynamics of the disruption halo current toroidal asymmetry in NSTX. Nucl. Fusion 53, 023005 (2013)
V. Riccardo et al., Progress in understanding halo current at JET. Nucl. Fusion 49, 055012 (2009)
G. Pautasso et al., The halo current in ASDEX Upgrade. Nucl. Fusion 51, 043010 (2011)
D.A. Humphreys, A.G. Kellman, Analytic modeling of axisymmetric disruption halo currents. Phys. Plasmas 6, 2742 (1999)
M. Sugihara et al., Analysis of disruption scenarios and their possible mitigation in ITER. in Proceedings of the 20th International Conference on Fusion Energy, Vilamoura 2004 (IAEA, Vienna, 2004). CD-ROM IT/P3-29
L.E. Zakharov et al., The theory of the kink mode during the vertical plasma disruption events in tokamaks. Phys. Plasmas 15, 062507 (2008)
H.R. Strauss, R. Paccagnella, J. Breslau, Wall forces produced during ITER disruptions. Phys. Plasmas 17, 082505 (2010)
H. Dreicer, Electron and ion runaway in a fully ionized gas. Phys. Rev. 117, 329–342 (1960)
H.M. Smith, E. Verwichte, Hot tail runaway electron generation in tokamak disruptions. Phys. Plasmas 15, 072502 (2008)
R.D. Gill et al., Direct observations of runaway electrons during disruptions in the JET tokamak. Nucl. Fus 40, 163 (2000)
M.N. Rosenbluth, S.V. Putvinski, Theory for avalanche of runaway electrons in tokamaks. Nucl. Fusion 37, 1355 (1997)
J.J. Cordier, Tore Supra experience on actively cooled high heat flux components. Fusion Eng Design 61–62, 71–80 (2002)
G. Martin et al., Disruption mitigation on Tore Supra, in Proceedings of the 20th International Conference on Fusion Energy, Vilamoura, 2004 (IAEA, Vienna, 2004). CD-ROM file EX/10-6Rc
A. Loarte et al., Magnetic energy flows during the current quench and termination of disruptions with runaway current plateau formation in JET and implications for ITER. Nucl. Fusion 51, 073004 (2011)
M. Jouve et al., Real-Time Protection of the “ITER-Like Wall at JET” EFDA JET preprint EFDA–JET–CP(11)06/01 (2011)
C.M. Bishop, Neural Networks for Pattern Recognition (Clarendon, Oxford, 1995)
J.V. Hernandez et al., Neural network prediction of some classes of tokamak disruption. Nucl. Fusion 36, 1009–1017 (1996)
A. Vannucci et al., Forecast of TEXT plasma disruptions using soft X rays as input signal in neural network. Nucl. Fusion 39, 255–262 (1999)
A. Sengupta, P. Ranjan, Forecasting disruptions in the ADITYA tokamak using neural networks. Nucl. Fusion 40, 1993–2008 (2000)
D. Wroblewski et al., Tokamak disruption alarm based on neural network model of high-beta limit. Nucl. Fusion 37, 725–741 (1997)
R. Yoshino, Neural-net disruption predictor in JT-60U. Nucl. Fusion 43, 1771–1786 (2003)
R. Yoshino, Neural-net predictor for beta limit disruptions in JT-60U. Nucl. Fusion 45, 1232–1246 (2005)
F. Milani, Disruption Prediction at JET. Ph.D. thesis, University of Aston, Birmingham UK, 1998
B. Cannas et al., Disruptions forecasting at JET using neural networks. Nucl. Fusion 44, 68–76 (2004)
B. Cannas et al., Neural approaches to disruption prediction at JET, in 31st EPS Conference on Plasma Physics (London, UK), vol. 28 G1.167 (2004)
T. Kohonen, Self Organ. Map Proc. IEEE 78, 1464–1480 (1990)
B. Cannas et al., A prediction tool for real-time application in the disruption prediction system at JET. Nucl. Fusion 47, 1559–1569 (2007)
G. Pautasso, O. Gruber, Study of disruptions in ASDEX Upgrade. Fusion Sci. Tech. 44, 716 (2003)
B. Cannas et al., An adaptive real-time disruption predictor for ASDEX Upgrade. Nucl. Fusion 50, 075004 (2010)
C.G. Windsor et al., A cross-tokamak neural network disruption predictor for the JET and ASDEX Upgrade tokamaks. Nucl. Fusion 45, 337–350 (2005)
G. Vaglisindi et al., A disruption predictor based on fuzzy logic applied to JET database. IEEE Trans. Plas. Sci. 36, 253–262 (2008)
A. Murari et al., Latest developments in data analysis tools for disruption prediction and for the exploration of multimachine operational spaces, in Proceedings of the 24th International Conference on Fusion Energy, San Diego, 2012 (IAEA, Vienna, 2013). CD-ROM EX/P8-04
Y. Zhang et al., Prediction of disruptions on ASDEX Upgrade using discriminant analysis. Nucl. Fusion 51, 063039 (2011)
S.P. Gerhardt et al., Detection of disruptions in the high-β spherical torus NSTX. Nucl. Fusion 53, 063021 (2013)
J. Vega et al, Results of the JET real-time disruption predictor in the ITER-like wall campaigns. Fus. Eng. Des. 88, 1228 (2013)
G.A. Rattá et al., Feature extraction for improved disruption prediction analysis at JET. Rev. Sci Instrum. 79, 10F328 (2008)
JM. Lopez et al., Implementation of the disruption predictor APODIS in JET’s real-time network using the MARTe Framework, EFDA JET report EFDA-JET-CP(12)03/04 (2012)
S. Dormido-Canto et al., Development of an efficient real-time disruption predictor from scratch on JET and implications for ITER. Nucl. Fusion 53, 113001 (2013)
A. Murari et al., Clustering based on the geodesic distance on Gaussian manifolds for the automatic classification of disruptions. Nucl. Fusion 53, 033006 (2013)
A.H. Boozer, Theory of tokamak disruptions. Phys. Plasmas 19, 058101 (2012)
J.P. Goedbloed et al., MHD spectroscopy: free boundary modes (ELMs) and external excitation of TAE modes. Plasma Phys. Control. Fusion 35, B277 (1993)
A. Fasoli et al., MHD spectroscopy. Plasma Phys. Control. Fusion 44, B159 (2002)
H. Reimerdes et al., Measurement of the resistive-wall-mode stability in a rotating plasma using active MHD spectroscopy. Phys. Rev. Lett. 93, 135002 (2004)
D. Testa et al., Real-time measurements of damping rates and instability limits for MHD modes on the JET Tokamak, in Proceedings of the 27th EPS Conference on Controlled Fusion and Plasma Physics, vol. 24B (Budapest Hungary, 2000), p. 1429
A. Kraemer-Flecken et al., Nucl. Fusion 43, 1437 (2003)
V. Mertens et al., Fusion Sci. Technol. 44, 593 (2003)
A. Kallenbach et al., Optimized tokamak power exhaust with double radiative feedback in ASDEX Upgrade. Nucl. Fusion 52, 122003 (2012)
T. Oikawa et al., Development of plasma stored energy feedback control and its application to high performance discharges on JT-60U. Fusion Eng. Des. 70, 175 (2004)
T.C. Luce et al., Long pulse high performance discharges in the DIII-D tokamak. Nucl. Fusion 41, 1585 (2001)
A.W. Morris, Feedback stabilization of disruption precursors in a tokamak. Phys. Rev. Lett. 64, 1254–1257 (1990)
B. Esposito et al., Disruption avoidance in the Frascati Tokamak Upgrade by means of magnetohydrodynamic mode stabilisation using electron-cyclotron resonance heating. Phys. Rev. Lett. 100, 045006 (2008)
B. Esposito et al., Avoidance of disruptions at high βN in ASDEX Upgrade with off-axis ECRH. Nucl. Fusion 51, 083051 (2011)
K. Hoshino et al., Avoidance of qa = 3 disruption by electron-cyclotron heating in the JFT-2 M tokamak. Phys. Rev. Lett. 69, 2208 (1992)
M. Sugihara et al., Disruption impacts and their mitigation target values for ITER operation and machine protection, in Proceedings of the 24th International Conference on Fusion Energy, San Diego, 2012 (IAEA, Vienna, 2012). Paper ITR/P1-14
G. Pautasso et al., Disruption studies in ASDEX Upgrade in view of ITER. Plasma Phys. Control. Fusion 51, 124056 (2009)
M. Lehnen et al., Disruption mitigation by massive gas injection in JET. Nucl. Fusion 51, 123010 (2011)
S.A. Bozhenkov et al., Generation and suppression of runaway electrons in disruption mitigation experiments in TEXTOR. Plasma Phys. Control. Fusion 50, 105007 (2008)
C. Reux et al., Experimental study of disruption mitigation using massive injection of noble gases on Tore Supra. Nucl. Fusion 50, 095006 (2010)
S.A. Bozhenkov et al., Runaway electrons after massive gas injections in TEXTOR: importance of the gas mixing and of the resonant magnetic perturbations, in 35th EPS Conference on Plasma Physics Hersonissos, 9–13 June 2008 ECA, vol. 32D, (European Physical Society, 2008), p. P-1.079
A.J. Thornton et al., Plasma profile evolution during disruption mitigation via massive gas injection on MAST. Nucl. Fusion 52, 063018 (2012)
E.M. Hollmann et al., Observation of q-profile dependence in noble gas injection radiative shutdown times in DIII-D. Phys. Plasmas 14, 012502 (2007)
E.M. Hollmann et al., Measurements of injected impurity assimilation during massive gas injection experiments in DIII-D. Nucl. Fusion 48, 115007 (2008)
C.R. Sovinec et al., Nonlinear magnetohydrodynamics simulation using high-order finite elements. J. Comput. Phys. 195, 355 (2004)
V.A. Izzo et al., Magnetohydrodynamic simulations of massive gas injection into Alcator C-Mod and DIII-D plasmas. Phys. Plasmas 15, 056109 (2008)
R. Granetz et al., Gas jet disruption mitigation studies on Alcator C-Mod. Nucl. Fusion 46, 1001–1008 (2006)
A.J. Thornton et al., Characterization of disruption mitigation via massive gas injection on MAST. Plasma. Phys. Control. Fusion 54, 125007 (2012)
M.L. Reinke et al., Toroidally resolved radiation dynamics during a gas jet mitigated disruption on Alcator C-Mod. Nucl. Fusion 48, 125004 (2008)
G. Pautasso et al., Contribution of ASDEX Upgrade to disruption studies for ITER. Nucl. Fusion 51, 103009 (2011)
R. Granetz et al., Disruption mitigation experiments with two gas jets on Alcator C-Mod, in Proceedings of the 24th International Conference on Fusion Energy, San Diego, 2012 (IAEA, Vienna, 2012). Paper EX/P8-09
V.A. Izzo et al., Impurity mixing and radiation asymmetry in massive gas injection simulations of DIII-D. Phys. Plasmas 20, 056107 (2013)
G. Pautasso et al., Plasma shut-down with fast impurity puff on ASDEX Upgrade. Nucl. Fusion 47, 900–913 (2007)
M.N. Rosenbluth, S.V. Putvisnki, Theory for avalanche of runaway electrons in tokamaks. Nucl. Fusion 37, 1355 (1997)
E.M. Hollmann et al., Experiments in DIII-D toward achieving rapid shutdown with runaway electron suppression. Phys. Plasmas 17, 056117 (2010)
R.S. Granetz et al., Disruptions, halo currents and killer pellets in Alcator C-Mod, in Proceedings of the 16th International Conference on Fusion Energy, Montreal, 1996, vol. 1 (IAEA, Vienna, 1997), pp. 757–762
G. Pautasso et al., Use of impurity pellets to control energy dissipation during disruption. Nucl. Fusion 36, 1291 (1996)
P.L. Taylor et al., Disruption mitigation studies in DIII-D. Phys. Plasmas 6, 1872 (1999)
R. Yoshino et al., Fast plasma shutdown by killer pellet injection in JT-60U with reduced heat flux on the divertor plate and avoiding runaway generation. Plasma Phys. Control. Fusion 39, 313 (1997)
N. Commaux et al., Demonstration of rapid shutdown using large shattered deuterium pellet injection in DIII-D. Nucl. Fusion 50, 112001 (2010)
N. Commaux et al., Novel rapid shutdown strategies for runaway electron suppression in DIII-D. Nucl. Fusion 51, 103001 (2011)
R. Yoshino et al., Generation and termination of runaway electrons at major disruptions in JT-60U. Nucl. Fusion 39, 151 (1999)
E.M. Hollmann et al., Effect of applied toroidal electric field on the growth/decay of plateau-phase runaway electron currents in DIII-D. Nucl. Fusion 51, 103026 (2011)
R. Yoshino et al., Runaway electrons in magnetic turbulence and runaway current termination in tokamak discharges. Nucl. Fusion 40, 1293 (2000)
M. Lehnen et al., Suppression of runaway electrons by resonant magnetic perturbations in TEXTOR disruptions. Phys. Rev. Lett. 100, 255003 (2008)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2015 Springer-Verlag Berlin Heidelberg
About this chapter
Cite this chapter
Hender, T.C. (2015). Disruptions. In: Igochine, V. (eds) Active Control of Magneto-hydrodynamic Instabilities in Hot Plasmas. Springer Series on Atomic, Optical, and Plasma Physics, vol 83. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-662-44222-7_7
Download citation
DOI: https://doi.org/10.1007/978-3-662-44222-7_7
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-662-44221-0
Online ISBN: 978-3-662-44222-7
eBook Packages: Physics and AstronomyPhysics and Astronomy (R0)