
Abstract
A credible roadmap to fusion maximizes performance while still allowing for a safe, efficient and reliable operation of the plant. In this effort control of plasma quantities and off-normal events plays a very important role: the challenge will be not only that of controlling individual quantities, but also that of integration in a harsh nuclear environment. Operation of a fusion reactor will need complete mastering of the plasma. Real time control of MHD stability is a paradigmatic example. Successful control of MHD stability is based in fact on integrated control of both magnetic and kinetic quantities, influences component integrity, plasma-wall interaction and D-T burn and is a requisite for handling off-normal events like disruptions. This final chapter aims at presenting a global view of the open issues and of the potential solutions that characterize the challenge of integrating stability control in an effective fusion scenario.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others
Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
10.1 Control Integration to Merge Performance and Reliability
Before becoming worldwide famous as aircraft pioneers in 1903, Wilbur and Orville Wright ran a shop specializing in bicycle repair and manufacture. At the turn of the century this was a growing business, as in 1887 the safety bike—i.e. that with two wheels of equal size, that was much easier to ride than the original high-wheel version—was introduced in the US from England. While almost everyone knows how to ride a bike, the physics of bike dynamics is much less well known, and still a subject of active research (see for example [1]). It is clear by experience that bicycle stability is the outcome of a complex dynamic interaction between the rider and the bike, and that the bike is a highly controllable device.
It is therefore not surprising that the Wright brothers exploited their bicycle experience in designing their aircrafts, and in particular to realize that an aircraft intentionally designed to be unstable—relying for the flight on a high level of human control—was the way to go to fly. Counting on stability control more than on passive stability was the key factor that made the Wright’s to win the competition for being the first to fly an airplane. A sketch of the 1903 wright airplane, with is main control systems, is shown in Fig. 10.1.

schematics of the Wright 1903 airplane with its control systems
After the pioneering times, the need for longer flight times and for reducing control burden on the pilot led to more passively stable aircraft design. The boom of civil aeronautics—and the consequent requirements for comfort, safety and cost reduction—brought the aircraft design even more toward designs relying on passive stability. The introduction of computer control, in particular of the fly-by-wire system, has allowed to relax some of the passive stability requirements, leading for example to lighter, more efficient and cheaper airplanes. A passively unstable design is mandatory for high-performance aircraft, such as fighters or aerobatic airplanes, where high speed, high manoeuvrability and in general the capability of operating at the leading edge of performance is a must. Flying such an aircraft is guaranteed by an active control system, which provides stability in a closed loop cycle based on sensors, stability models, computers and actuators. Should such an active control system fail, flying would not be possible anymore.
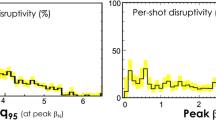
Relying on an active control system—with the potential risks of its failure—is a price that in aeronautics must pay for high-end performance. In general, aircraft are an example of a system where the mission (e.g. safety vs. performance, comfort vs. manoeuvrability,..) determines the design and therefore the control requirements. The case of a magnetized fusion device has several analogies: the increase of performance—in terms of confinement and steady-state capabilities—and approach to the final goal, i.e. exploitation of fusion for electric energy production—is often accompanied by less stable scenarios. For these scenarios, as we shall see for the DEMO case (the reactor prototype), the mission of the project strongly influences the control strategy. A paradigm of the link between stability and performance is shown in Fig. 10.2, which reports the outcome of a JET experiment [2] where an external perturbation is periodically applied to the plasma, and in the mean time the normalized pressure of the plasma itself, measured by βN, is increased by adding auxiliary NBI power. As we have seen in the introduction and in Chap. 2 of this book, βN is a good figure of merit for tokamak performance. We clearly observe how the plasma response to the applied perturbation, measured by the edge magnetic radial field, is directly correlated with βN. The higher βN, the stronger the plasma response to the externally applied perturbation, meaning that the plasma is closer to the stability boundary and external seeds for instabilities are more easily amplified.

Time evolution of plasma current, auxiliary input power (NBI and LHCD), βN, current in the external coils (proportional to the applied magnetic perturbation) and plasma response (measured by the plasma edge radial magnetic field b r) for JET #59223 (Figure from [2] )
The general point is that the higher the performance, the larger is the free energy available in the plasma, which can be released through instabilities driving relaxation towards a lower energy state. Magnetic and thermal energy, kinetic energy associated to fast particles, they may all be sources of free energy, as we shall briefly see in the next three examples.
As discussed by Zohm in the introduction, the fusion performance in a tokamak is measured by the triple product nTτE, where n is the particle density, T the plasma temperature and τE the confinement time. In Chap. 2 we saw that moving from L to H-mode brings a confinement improvement by roughly a factor of two, with the build-up of a steep edge pressure gradient. But more free energy is available in the H-mode, which is characterized by MHD instabilities not present in the L-mode, like for example Neoclassical Tearing Modes (NTM, see chapter eight) and Edge Localized Modes (ELM, see chapter five). There is an optimal temperature of about 20 keV for the fusion global energy balance—identified by the balance between fusion reaction rate and bremsstrahlung losses. To increase the triple product further it is then important to maximize density and confinement time. Both roughly scale with plasma current. Operating with high plasma current is therefore beneficial for the triple product, but it is also a source of free energy. Stability analysis dictates a hard limit for the tokamak, the Kruskal-Shafranov limit. Given the size of the device and the toroidal field, this limit sets a maximum value for the plasma current. Since the higher the toroidal field the more severe are the technological challenges—which eventually set a limit on the maximum toroidal field that can be used in a tokamak—, the Kruskal Shafranov is a limit for plasma current. It is normally phrased as a limit in the edge safety factor q a, q a ∝ (a 2/R)(B t/I p) ≥ 2, where a and R are the minor and major of the device, B t and Ip the toroidal field and plasma current respectively. As in the case of a fighter aircraft, that flies despite being passively unstable, also the q a < 2 tokamak is passively unstable and might operate at q a < 2 thanks to active control, as pioneering experiments have shown [3–5]. And as unstable aircraft gain in performance, also the passively stable tokamak does, being able to run at higher current.
When considering a reactor design, to the requirement of high confinement one may add the requirement of a fully non-inductively driven tokamak, i.e. a configuration that can be stationary and not relying on a transformer for current drive. The advanced tokamak (AT) regime presently the most likely optionFootnote 1 for a steady-state tokamak (see [6] for a review of the steady state tokamak), since it provides high-pressure gradients also in the plasma core, and therefore high bootstrap current that can replace the inductively driven one. High-pressure gradients, though, provide free energy to drive external kink modes, or resistive wall modes (RWM) in the presence of a resistive wall.
As the devices approach fusion conditions, a larger population of fast ions is present in the plasma, and they can cause fast particle driven instabilities. The need for making room for blankets at the device periphery to convert the neutron flux—necessary in a reactor—also may act against stability as it increases the distance between the plasma and the wall.
Some of these instabilities, like for example ELMs, may lead to unbearable heat loads on the plasma facing components [7]. Others off-normal events like plasma disruptions that, besides causing premature plasma termination—already a bad event for an electricity production plant—might lead to very severe damage to the device.
A credible roadmap to fusion must therefore find the narrow route that maximizes performance while still allowing for a safe, efficient and reliable operation of the plant. In this effort control of plasma quantities and off-normal events plays a very important role: the challenge for it will be not only that of controlling individual quantities, but also that of integration in a harsh nuclear environment. Operation of a fusion reactor will need complete mastering of the plasma, that means real-time control of the plasma position and shape, of magnetic and kinetic profiles, of the plasma-wall interaction and of the exhaust, of the deuterium-tritium burn, and the ability of mitigating the consequences of off-normal events when there is no other option. This means integrating a large number of sensors and actuators with algorithms and first-principles and/or black-box models into an efficient control architecture, all in a challenging environment.
Real time control of MHD stability is a paradigmatic example of all this. Successful control of MHD stability is based in fact on integrated control of both magnetic and kinetic quantities, it influences component integrity, plasma-wall interaction and D-T burn and is a requisite for handling off-normal events like disruptions.
In the chapters of this book we have reviewed in great detail the physics behind the main MHD instabilities in a tokamak, how they set operational limits and the tools to control them. Based on that very detailed information, this final chapter aims at presenting a global view of the open issues and of the potential solutions that characterize the challenge of integrating stability control in an effective fusion scenario. We will first summarize in Sect. 10.2 the approaches to the control of individual instabilities presented in the previous chapters, highlighting in particular the “cross-talk” amongst them. Then, in Sect. 10.3, we will discuss the multi-faceted challenge of integrated control, to finally discuss in Sect. 10.4 how they are addressed in present and future research and in particular in ITER [8], with a final outlook on the present DEMO design.
A note for the reader: as this chapter touches almost all the subjects covered in the book, the number of references could be very large and many of them would duplicate others already quoted. Therefore we refer the reader to individual chapters and to the references therein quoted for a broad bibliographical coverage.
10.2 A Brief Summary of Present Control Tools
10.2.1 Sawtooth
The sawtooth instability was one of the first to be discovered in tokamaks [9]. They have beneficial effects, like preventing core impurity accumulation, but it took some time before the indirect implications for burning plasmas of this relaxation cycle were clearly identified. Sawtooth crashes cause a sudden perturbation of the plasma, which produces magnetic disturbances. If these disturbances are large enough, they may act as seeds of other dangerous instabilities, like NTMs.
The point is that in burning plasmas, the significant energetic ion population tends to stabilize sawteeth [10] and this is likely to result in longer sawtooth periods and therefore in more free energy being accumulated before the relaxation event takes place. This increases the likelihood for sawteeth to trigger other confinement-degrading instabilities and calls for technique to control the sawtooth oscillations, while retaining beneficial effects. At the moment the main goal of sawtooth control is to destabilise the internal kink mode and so stimulate a sawtooth crash when the sawtooth has not grown excessively (for a recent review on sawtooth control see [11]). An alternative approach is to deliberately maximise the sawtooth period. Indeed, this was originally considered the most desirable route to sawtooth amelioration in the 2007 ITER Physics Basis [2], but destabilisation is now generally the favoured option. This was driven in particular by concerns that grew about both the complexity of the NTM triggering mechanism—still relatively poorly understood—and the need for frequent expulsion of the on-axis accumulated higher-Z impurities that would otherwise radiate energy.
As discussed by Chapman in chapter four, the primary methods used to achieve this foresee actions on the quantities that control stability: energetic ions, plasma rotation and the local current density gradients can have a significant effect on the stability of the internal kink mode, thought to underlie the sawtooth phenomenon. Whilst the present explanation of the physics of sawtooth oscillations remains incomplete, the control dynamics is relatively well understood and numerical modelling has been able to explicate the sawtooth behaviour observed with different actuators in a number of tokamaks [11]. In particular Ion Cyclotron Resonance Heating (ICRH) or Neutral Beam Injection (NBI) are used to tailor the distribution of energetic ions. Electron Cyclotron Current Drive (ECCD), Lower Hybrid Current Drive (LHCD) or heating of the electrons inside the q = 1 surface with Electron Cyclotron Resonance Heating (ECRH) is used to control the radial profiles of the plasma current density and pressure, notably their local gradients near the q = 1 surface.
10.2.2 Neoclassical Tearing Modes
The NTM is an instability driven by plasma pressure and it is therefore more virulent in high performance regimes, where the thermal energy content of the plasma is higher [12, 13]. It needs to be avoided or, if that is not possible, controlled for efficiency and plant safety reasons. As shown in chapter eight by Maraschek, when an NTM is present in the standard H-mode it limits the maximum achievable plasma pressure, and therefore the reactor performance, causing an overall reduction of confinement of about 20 % for the (3,2) NTM, and even higher for the (2,1). In the hybrid H-mode scenario NTMs have a smaller impact on confinement. If the NTM grows large, in particular the (2,1), it can lock to the wall and cause a plasma disruption. NTM control will be particularly important in ITER because the onset beta value for NTM is observed to decrease with plasma flow, which in ITER will be significantly smaller than in present devices.
NTM control is presently based on two approaches: avoidance and removal or mitigation of unavoidable NTMs, both extensively discussed in chapter eight.
Avoidance of NTMs means eliminating the driving forces—i.e. modifying plasma stability properties—or the triggers for NTM. Since the main drive of the NTM is the missing bootstrap current, a local reduction of the unperturbed bootstrap current close to the potential resonant surface should reduce the maximum saturated island size. The dominant part of the pressure gradient is the local density gradient: the reduction of the latter at the resonant surface then reduces the probability for NTM excitation. This can be done tailoring the density profiles, for example applying central ICRH, but is applicable only in a particular collisionality range. In addition, flattening of the core density profile might be detrimental in a reactor. Both these aspects make it problematic to apply this approach to reactor-scale devices. Avoidance—or at least significant delay in the NTM appearance—is obtained by applying ECCD locally at the (3,2) resonant surface before the mode appears.
A second approach for avoiding NTMs is based on avoiding the seed island by the reduction of MHD events, which may trigger NTMs. As we have just seen above, this concentrates mainly on the avoidance of large sawteeth and of fishbones at the q = 1 surface.
The removal or mitigation processes need to act when an unavoidable NTM is present in the plasma. ECCD application at resonant surfaces is an appropriate option [14], suitable to be used on real-time. Besides being used to destabilize sawtooth or in pre-emptive way, ECCD can in fact be applied directly at the island location (i.e. at q = 3/2 and q = 2) to replace the missing bootstrap current and therefore reduce—or heal—the island.
10.2.3 Edge Localized Modes
In the tokamak H-mode the steep plasma pressure gradient and the increased current density at the edge pedestal can exceed a stability threshold and drive a particular MHD instability referred to as an Edge Localized Modes (ELM) [15, 16]. The ELM appears in a cyclic fashion, and it causes the collapse of the edge pedestal, resulting in less steep pressure gradient within a few hundred microseconds. Heat and particles are expelled by the ELM from the confined plasma onto the plasma facing components. Then the edge pedestal recovers again, as in the pre-ELM phase. Each ELM is characterised by an increase in the radiation shown in the Dα line emission and by a burst of magnetic activity. ELM events can lead to large transient heat and particle loads on the plasma facing components as well as reducing the pedestal energy confinement by approximately 10–20 %. While in present devices this is acceptable, the extrapolation of their data on heat and particles deposited on the wall components for ITER leads to ELM energy loss ranging from approximately 5 to 22 MJ, where the uncertainty is due to the present gap in physics understanding. It is expected that approximately half of this energy will reach the wall and be deposited over a region of one square meter, known as the wetted area. Thus, the surface energy density could be 2.5–11 MJm−2 which is about 20 times higher than what is acceptable for the ITER first wall components, primarily made of tungsten or carbon fibre composites. ELM mitigation or suppression solutions are therefore mandatory for ITER.
Several ELM control methods have been developed and are presented by Liang in chapter five. They are based on a variety of actions made to the plasma, and follow three main routes: (a) weakening the loads on the plasma facing components by converting part of the ELM energy losses; (b) making them smaller and more frequent, to reduce individual ELM loads; (c) suppressing ELMs by controlling the pedestal pressure gradient or the edge current density to avoid exceeding stability thresholds.
Seeding the plasma edge with impurities like nitrogen or argon is a tool to increase radiation in the divertor during ELMs, but both experimental and modelling results show that reduction of ELM energy by this method is difficult for the large ELMs and may not work alone.
With fast vertical movements of the plasma column with pre-programmed frequency and amplitude—known as vertical kicks—the ELM frequency can be locked to the frequency of the externally imposed magnetic perturbation, enabling control of ELM frequency and size. The magnetic perturbation is induced by a set of vertical stabilization coils with controllable frequency and amplitude. This technique needs in-vessel coils to reach a high kick frequency. Recent results from JET [17] are promising, and this tool will be used for the ITER-like wall experiments on JET.
Launching trains of pellets allows for pacing ELMs at the pellet frequency. This can typically achieve a factor of two for the reduction of the energy per ELM. High frequency ELM pacing still needs to be demonstrated in large devices.
ELM suppression or reduction via applied resonant magnetic perturbations (RMPs) [18] is promising, although the physics mechanism is not well understood as yet. As discussed in Chap. 5, RMP fields offers an attractive method for next-generation tokamaks, e.g. ITER. The results obtained from DIII-D, JET, AUG, MAST, KSTAR, NSTX and EAST tokamaks have shown that magnetic field perturbations can either completely suppress ELMs [18], trigger small ELMs during ELM free periods, or affect the frequency and size of the type-I ELMs in a controllable way, preserving good global energy confinement [19–21]. Recent data show that RMPs impact on fast ion confinement and can cause significant fast ion losses [22]—something that might be not desirable in a reactor. Pellet pacing could work synergistically with RMPs, helping to compensate the density pump-out caused by RMP.
A joint effort from different devices and numerical codes will allow to extend the database and to understand ELM suppression.
10.2.4 Resistive Wall Modes
The advanced tokamak regime is a promising candidate for steady state tokamak operation, desirable for a fusion reactor. Constant power production is more convenient for energy conversion and avoids the power storage step required for pulsed operations. In addition, constant power loads on the plasma facing components allow simpler power handling, lower engineering efforts for reactor design, and smaller costs for the fusion power plant.
As discussed by Igochine in chapter six, the advanced tokamak regime is characterized by a high bootstrap current fraction—that eventually should completely substitute inductively driven currents—and a flat or reversed safety factor profile. This leads to operation close to the pressure limit (see Chap. 2) and as this limit is exceeded the external kink mode becomes unstable.
Without a conducting wall around the plasma, this mode would grow on an ideal time scale, which means microseconds, and in this condition would be a show-stopper. If a conducting wall is present in the device, the external kink is converted into the slowly growing Resistive Wall Mode (RWM) [23] (for a recent review on its control see [24]). The growth rate is then reduced to values of the order of the metallic wall magnetic field penetration time, typically of the order of milliseconds. This reduction makes it technically possible to act on the mode and to stabilize it with externally applied magnetic fields. Actively driven coils, which produce a magnetic perturbation cancelling that due to the mode, are the work-horse for RWM control and have been proved to work effectively both in the tokamak and in the reversed field pinch (RFP). RFPs, in particular, have demonstrated the possibility of full suppression of multiple simultaneous RWMs [25] and have studied how this depends on the active coil geometry and number [26].
Coils are used for integrated control and avoidance of RWMs and other MHD perturbations (e.g. error field, ELM..), which could act as RWM trigger. One available route is to avoid RWM growth using controlled coils with a wide-band feedback system that corrects slow (error field correction) and fast (RWM) dynamics simultaneously [27]. An alternative is based on a “three step strategy”, with increasing complexity in coil use. First one tries to avoid RWM by correcting error fields and ELM mitigation. If a mode grows anyway, the second step is to prevent coupling to the wall and suppress RWM in its infancy by active coil feedback. When also this fail, the third step—which is more challenging under many points of view—is to decouple the RWM from the wall, rotate and suppress it by feedback. Stronger feedback action is clearly needed in this case.
The feedback control of RWM has been recently particularly successful in allowing access to the unexplored operation territory of scenarios with edge safety factor close or below 2. High current, stable tokamak plasmas with edge safety factor below or around 2 are in fact attractive for magnetic fusion due to favourable high fusion gain and higher confinement. But they have long been considered inaccessible in modern devices owing to the unforgiving MHD instabilities. Even in devices with a resistive wall, the onset of an n = 1 resistive wall mode (RWM) leads to a disruptive limit at edge safety factor ≈2. Recently DIII-D and RFX-mod tokamaks have robustly overcome the edge safety factor = 2 limit by active control of plasma stability and demonstrated that operation below 2 is possible for hundreds of resistive wall times [4, 28, 5].
Interestingly, active RWM control might be helped by the interaction of the mode with plasma flow and fast particles, two players that contribute to RWM stability. The influence of the fast particles will be increasingly important in ITER and DEMO, which will have a large fraction of fusion born alpha’s, while plasma rotation will likely be much smaller, if not absent, with respect to present devices. These interactions have kinetic origins that make the computations challenging. Correct prediction of the “plasma-RWM” interaction is an important ingredient, which has to be combined with the influence of external fields (resistive wall, error fields and feedback) to make reliable predictions for RWM control in a future reactor. In principle the stabilizing effect of fast particle in ITER might allow for a substantial increase in fusion performance with less demanding use of coils.
10.2.5 Disruptions
Disruptions are the most serious MHD off-normal events that may happen in a tokamak. So serious, that they can potentially cause fatal damage to the device. They are at the top in the list of problems that need to be solved to allow the safe operation of ITER. Disruptions are a rapid loss of the confined hot plasma and its current, often producing also a beam of runaway electrons. They cause heat loads to the plasma facing components and electromagnetic forces on the device structure. While disruptions are relatively common events in present tokamaks, the situation needs to change in ITER. As described by Hender in chapter seven, both energy dissipated to the wall and electromagnetic forces grow as L 3—where L is the linear dimension of the plasma [29]—which means that doubling the size of the tokamak (e.g. the step from JET to ITER) increases the loads at disruption by an order of magnitude. Maximum electromagnetic forces on the vacuum vessel are of the order of 4 MN in JET and are expected to be of the order of several tens of MN in ITER [30].Footnote 2 Disruptions and runaway electrons in ITER, if unmitigated, cause significant thermal loads on ITER plasma facing components and may lead to significant melting. If unmitigated, they can also cause mechanical loads on the so called safety important class (SIC) components, like vacuum vessel, port plugs and supports, cryostat support and other conductive in-vessel components.
To better clarify the extent of the problem, it is worth noting that four categories of mechanical loads are considered in the ITER design [31]: disruptions of category I are considered as a normal operational condition and 2600 events of this time are allowed for in the ITER lifetime; category II loads are allowed to occur only in a smaller number of events (400), while category III corresponds to severe disruptions, which should not happen more than 1-2 times during the machine lifetime. For example, a Vertical Displacement Event (VDE) due to loss of plasma magnetic control or a major disruption with very short current quench time (τCQ < 36 ms) are category III disruptions. Category IV disruptions are considered extremely unlikely events—though not impossible—and none of them should happen ever (though the SIC components are designed to sustain one of them).
Finding effective means to control disruptions is therefore a must for ITER and for future devices. Control, in the case of disruptions, is a word that has several meanings, though.
First of all, control means avoidance. Avoiding a disruption is for example the outcome of an efficient control of those instabilities—NTM, RWM, etc.…—that may eventually lead to a disruption. Control also mean predictability, i.e. the capability of detecting with sufficient warning time, and without false alarms, when a situation is evolving towards disruption. This is key for both avoidance and mitigation. Learning base methods like neural networks have been developed, but they have an intrinsic weakness since they need a training set of disruptions—obviously something not wanted in ITER—and do not work well outside the domain of their training. Ways to overcome these issues are being studied, but further efforts on models based on first principles, i.e. on physics, are needed. These are very difficult, since they need state-of-the-art non-linear, three-dimensional numerical simulations.
Disruption control means also mitigating their effects. In fact, even if much can be done to reduce the disruption probability, there will also be some of them that can never been avoided, like those caused by flakes of material falling off the wall, or by a power supply failure. The goal of the ITER disruption mitigation system is to reduce energy loads on PFCs and transform hard disruptions of Category II and III into milder Category I events. Chapter seven has shown that massive gas injection and killer pellets have both proved effective in giving the required level of mitigation of the electromagnetic forces arising from halo currents. These techniques are also effective in reducing heat loads, though issues of toroidal asymmetries, arising from the local nature of the massive gas injection or pellet injection, need to be fully understood. More problematic is at the moment the mitigation of runaway electrons. Theoretically the most effective method is boosting plasma density to such high level that the collisions inhibit secondary runaway growth, but such densities have not yet been achieved and pose significant problems. The research is now focused to understand whether such high densities need to be achieved to mitigate runaways, when all the mechanisms damping runaway growth are considered.
10.2.6 Fast Particle Driven Instabilities
A significant population of fast ions, i.e. ions with kinetic energies much higher that those of the thermal plasma, is implicit in a fusion-grade magnetized plasma [32]. Heating systems that produce fast ions will be used to initiate and control plasma burn and the D-T fusion reactions produce 3.5 MeV alpha particles.
The interaction of fast ions with MHD stability is bidirectional. As illustrated by Pinches and Sharapov in chapter nine, free energy associated with these fast ions has the potential to drive MHD instabilities that can cause both redistribution and loss of the energetic particle, therefore degrading performance. Expulsion of fast ion may also cause damage to the plasma facing components [33, 34]. Moreover, other MHD instabilities are affected by fast ions and/or the perturbations due to these MHD instabilities can cause fast ions anomalous transport. We have already seen the case for sawtooth and RWM stabilization. But—just to make other examples—sawteeth also lead to redistribution of fast ions [35], NTMs and magnetic field errors like those caused by ripples in the toroidal field at the plasma edge cause losses of fast ions [36], and also the RMP technique used for ELM control causes anomalous energetic particle losses. A positive feature is the possibility of tracking stable fast ion driven modes in real-time. This presently allows almost continuous measurements of the plasma stability [37]. If such modes were to pose a significant risk to the operation of future devices, then the ability to measure the proximity to stability limits would allow appropriate mitigating action to be undertaken in a timely manner.
Fast ion driven modes are also an opportunity to diagnose the plasma. For example, the frequency evolution with time of Reversed Shear Alfven Eigenmodes provides information about the helicity of the core magnetic field [38].
10.3 The Challenge of Integrated Control
As illustrated in details in the previous chapters, and briefly summarized here, there is bad and good news. The bad news is that several MHD instabilities are present in a tokamak and become more virulent as plasma performance is pushed towards fusion conditions. The good news is that we are learning about them, and in particular how to control them. We have seen in fact that several actuators are available to control, suppress or mitigate plasma instabilities. Looking into the future, the ultimate challenge is emerging: that of integrating several control actions into a reliable, efficient and as simple as possible strategy, with much more demanding constraints. Extra effort is in fact necessary with respect to the ability of controlling individually each instability in a relatively forgiving environment, as we often do now. Let us see why, starting from some of the issues that we will need to face.
The role of instabilities is not unique, and not necessarily bad. As an example, we have seen that sawteeth are potentially very dangerous as trigger of NTMs. Nonetheless their role in avoiding core impurity accumulation, and in burning plasmas in providing helium ash removals, is very important. Recognizing the strong links among these two opposite roles is what has steered the consensus towards techniques controlling sawteeth through their destabilization, more than the opposite.
NTMs are potential killers of the plasma, but in the hybrid regime—at a reduced amplitude—they may play a role in current redistribution and in clamping the core safety factor profile without spoiling significantly confinement [39]. Something similar, by the way, happens with their classical analogue—the tearing mode—in the reversed field pinch single helicity regime. Here a saturated resistive mode is the result of a plasma self-organization and leads to improved confinement [40]. ELMs are the result of a cyclical relaxation that help maintaining the edge gradients in the H-mode, but when scaled to ITER-class devices this plasma “breathing” needs to be faster and smaller than extrapolated to avoid material damages. A small (4,3) tearing mode might help in driving the plasma into the NTM Frequently Interrupted Regime, where the negative influence of (3,2) NTMs on confinement is weaker [41].
Instabilities and in general magnetic perturbation “talk” one to each other. This may happen directly, or indirectly—through their driving terms. Among the examples of direct interaction we have just mentioned sawteeth seeding NTMs. ELMs or fishbones can trigger metastable RWMs in high beta scenarios [42]. Magnetic field errors can seed NTMs or RWMs, but they are also by purpose applied to destabilize ELMs and make them harmless or, in certain cases, to make sawteeth smaller and more frequent.
The role of plasma quantities is not always unique in terms of stability. A population of fast particle may stabilize sawteeth and RWM, but also drives fast particle instabilities. The current density profile that provides a flat or reversed shear profile might avoid resonant surfaces for sawteeth and NTMs, but could give raise to other instabilities.
Stability control has a cost. This could be both direct—i.e. in terms of the capital cost of the control tools like additional heating or current drive systems, of the extra energy, which is needed to drive actuators and that needs to be taken into account in the overall energy budget—and indirect, since control actions may spoil plasma performance. These costs might be bearable, but need to be minimized.
A neat example of direct cost is NTM stabilization via ECCD. As discussed in chapter seven, with the application in ITER of 20 MW of ECCD power for NTM removal the pre-NTM energy confinement time is recovered. But the energy amplification factor Q, given by the ratio of the power produced by fusion to that given as input to the plasma, drops from 10 to 7 (8.5 for the optimistic case if only 10 MW are needed) [43]. The additional ECCD power has in fact to be included in the energy balance. Once the NTM has been stabilized Q = 10 is recovered by switching off the gyrotrons. When the next NTM gets triggered, the gyrotron are switched on again and the loop repeats. This—and other examples too discussed in the NTM and sawtooth chapters—mean that one has to be careful in applying ECCD. For example, a continuously applied pre-emptive ECCD will reduce the achievable Q-value, correspondingly. ECCD has to be used wisely and not wasted.
Another example—that applies to a reactor—is that of false alarms. Control system must be as reliable as possible. While shutting down a discharge because of a disruption false alarm in a present day tokamak is not an issue, the economic damage of switching-off a tokamak reactor for the same reason might be large.
Two examples of control indirect costs concern ELMs and NTMs. The most promising technique for ELM control is at the moment the application of resonant magnetic perturbations. The perturbation causes an artificial increase of edge transport in the pedestal region, thus reducing edge pressure. This reduction either completely suppresses ELMs, if edge pressure goes below ELM instability threshold, or at least make them smaller and more frequent. Obviously the artificial increase of edge transport causes also a small steady reduction of confinement, a price that can be paid in order to get rid of ELMs. Still not completely clear, as we have seen before, is the cost in terms of fast ion losses. Talking about NTMs, we have seen that a flat core density profile obtained with central ICRH may help for NTM stability; but flattening the core pressure profile is probably a price too high in a reactor, which makes this technique unlikely to be pursued in future experiments.
Control will be difficult in a nuclear environment. In ITER, and even more in DEMO, the nuclear environment and the consequent neutron flux will make much more difficult to operate sensors and actuators. Some of those presently used will simply not be applicable. And those, which will be there need to be extremely robust, since maintenance will be extremely difficult, if not impossible.
Opportunity for testing will be much less. While present day devices allow ample room for testing control techniques, with relatively small risk for the hardware, the next generations of experiments will be much less forgiving. This is challenging: training based methods, like for example disruption prediction tools, need in their present version a database, which can obviously not be provided in a device like ITER. And also the development of other active MHD control tools, will not be able to rely on experiments that can potentially fail, as happen today. Risks in experiments testing control tools need to be strongly minimize, which of course drastically reduce the input from experimental flexibility.
Noise can not be neglected. Given the safety standards required by the ITER, an issue like that of noise in the measurements will be very important. This applies for example to the axisymmetric control, like that of the vertical position of the plasma. The vertical stabilization system is crucial in ITER, given what a vertical displacement event can cause. A key parameter for this system to work is the noise in the dZ/dt measurements, where Z is the vertical position of the plasma. Noise is unavoidable, and its increase above a given level (at the moment 0.6 m/s) may produce unacceptable oscillations in the power taken from the grid for driving the vertical stabilization system or reduce the duration of the burn phase because of AC losses in the superconducting coils. The assessment of expected noise in ITER dZ/dt measurements, and the development of methods to reduce it, are still subject of investigation and are issues that need to be solved soon.
Not all can be planned. In addition to being able to coping with MHD instabilities that can be predicted or, the control system of a fusion device must to capable to handle exception, i.e. events not planned or desired—outside the standard function of the device—that can have significant impact on operation or device safety. This includes for examples faults of components and disruptions. Basic goals for exception handling systems are to minimize the probability of unexpected events and their consequences for the plant, and robustness. Handling could mean avoidance, recovery, switching to alternative regimes or, when nothing else is possible, safe landing through controlled shutdown.
10.4 Control Integration
Given the issues we have just analysed, and the importance that MHD stability has for a fusion reactor, it is clear that the development of an integrated control strategy is a grand challenge for exploiting fusion as an energy source. The strategy to address this challenge needs to be based on several pillars.
ITER will be the most important one. Its portfolio of sensors and actuators [44] gives the opportunity of explore the operation space, to integrate simultaneous MHD controls addressing the issues discussed before and to find the best operation points, which will be a precious input for DEMO.
Plasma axisymmetric magnetic control will be guaranteed by a combination of the central solenoid, of the poloidal field and of the internal vertical stability coils, with their power supplies. The inductive plasma current, shape and radial position control will have a settling time of about 5 s, while the faster vertical position control with the in-vessel coils will have a settling time of 0.1 s. This should allow or restoring the plasma vertical position after an uncontrolled vertical drift of about 16 cm, assuming a maximum noise in dZ/dt of 0.6 m/s.
The system of in-vessel coils is composed, in addition to the vertical stabilization coils, by 3 sets of 9 coils each, explicitly design for ELM control—via the application of resonant magnetic perturbation—and RWM control—via feedback control. A radiative divertor will act synergistically with RMP to mitigate ELM loads on the plasma facing components. Outside the vessel three sets of 6 coils each (top, bottom and equatorial) are present to deal with error magnetic field coming from equilibrium coil misalignments, feeds and from ferromagnetic materials, in particular in the Test Blanket Modules.
A combination of both ICRH and ECCD is planned for controlling sawteeth in ITER. It is predicted that a combination of 13.3 MW of co-ECCD from the equatorial launcher and 6.7 MW from the upper launcher would be able to reduce the sawtooth period by 30 %, while 10 MW of ICRH should be sufficient to negate the stabilising effects arising from the alpha population. ECCD will be a key player also for NTM stabilization. The available ECCD power of 20 MW at 170 GHz should be sufficient, and will be coupled to a system of steerable mirrors, all controlled in real time. Interestingly, ECCD might be coupled with the effect of applied magnetic fields following a scheme tested in DIII-D; NTM islands can in fact be dragged and locked in the best toroidal position for optimum application of the ECCD by use of magnetic active coils [45], a technique used for unlocking classical tearing modes also in RFPs [46]. To meet the Q = 10 goal of ITER baseline scenario, the ECRH power has to be turned off whenever it is not being actively used for mode control and the balance with the use of ECCD for sawtooth control needs to be found. This can be done either by following a prescribed sequence by switching-off central ECRH [47] or—instead of relying on smaller sawteeth—exploiting fast ions to deliberately stabilise the sawteeth, and to pre-emptively apply ECCD before each crash the near the q = 2 rational surface to stabilise the ensuing NTM [48].
Modelling is crucial to develop efficient control. Modelling is clearly needed to better understand the physics underlying MHD stability. The case of disruptions is a paradigm from this point of view, since a detailed knowledge of the physics that drives disruptions would be very important to improve their predictability. And modelling is also key for high performance model-based control. The flow chart of a control development strategy, which includes the verification in simulations before experimental application is sketched in Fig. 10.3 (adapted from [49]) Models of the physics and of the machine boundary conditions, at various levels of complexity, are needed to develop the control algorithms and a robust system simulator, which includes models of plasma response, actuator, diagnostic, power supplies. As in aeronautics, the availability of flight-simulators are crucial to ensure a safe, error-free application of new control technologies.

Flow chart of an integrated control strategy (adapted from [49])
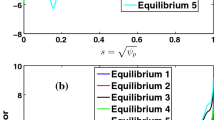
A nice example of an integrated simulator for closed loop RWM control experiments has been developed and benchmarked in the RFX-mod RFP device [50]. The tool couples self-consistently a full 3D description of the machine boundary (with the Cariddi code), a 2D toroidal model of stability (MARS code) and a dynamic model of the control system cast in the state variable representation. Using actual PID gains and plasma equilibrium parameters such “flight simulator” successfully reproduces experimental closed loop RWM control, as shown in Fig. 10.4.

Figure 10.4a shows the time evolution of the amplitude of the radial field perturbation due to the (m = 1, n = −6) RWM measured in RFX and simulated by the integrated simulator. In Fig. 10.4b the growth rates of RWMs in RFX are plotted as a function of the proportional gain applied to the controller. If the gain is not high enough, only a slowing down of the RWM growth rate with respect to the uncontrolled case (gain = 0) is obtained, while with the proper gain the growth rate is brought to zero. Stars are experimental measurements, open circles predictions from the flight simulator. We notice how precise is the agreement in both figures, meaning that the flight simulator is capable of completely predicting the stabilization physics for this device.
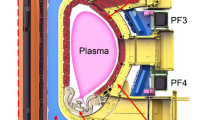
Accompanying experiments. The case of the RFX flight simulator is an example of how important is that construction and operation of ITER is accompanied by a large set of flexible experiments, that allow for developing and testing off-line control strategies to be later transferred to ITER. While these devices will not provide the same level of integration as ITER, they can scrutinize in depth and at low-cost, low-risk the building blocks of control strategies. How the present-day tokamaks have contributed—and will contribute—to the control grand challenge has been extensively described in the book. The new tokamak JT-60SA [52], which is scheduled to start its operation in 2019, will give an important contribution. JT-60SA is a fully superconducting tokamak capable of confining break-even equivalent high-temperature deuterium plasmas. JT-60SA will address the physics and technology of steady-state tokamak. It is designed to study power and particle handling for 100 s at high power with water-cooled divertors compatible with maximum heat fluxes of 15 MW/m2 and it will be able to explore full non-inductive steady-state operation with 10 MW tangential NB current drive and 7 MW of ECCD. For the study of steady-state, non inductive scenarios, JT-60SA will be able to explore high beta plasma regimes by using a high power heating and current drive system together with a stabilizing shell covered with ferritic plates, a very large set of external and internal active coils for fast position, error field and RWM control (see Fig. 10.5).

Overview of JT-60SA in-vessel active coil system, composed by 2 fast plasma position control coils, 18 error field correction coils, 18 resistive wall mode control coils. A passive stabilizing plate is present [52]
The role of non-tokamak devices is important as well. Covering the stellarator approach to steady state plasmas is beyond the scope of this book, but it is worth mentioning that that approach is complementary in many respects to tokamak and has the big advantage of steady state operation and of zero disruptivity. RFPs, has already mentioned, have provided pioneering results on MHD feedback control via active coils [53]. The size and the completeness of their coils system—RFX, for example, has 192 coils each independently driven—make their contribution important for the development of integrated MHD control.
DEMO. DEMO should be a step intermediate between ITER and the commercial power plant. To fulfil this goal, DEMO top level design requirements are (a) ability of net electricity production; (b) ability to be self-sufficient in terms of tritium production; (c) to provide a robust solution of all physics and technical issues still open at the moment; (d) to guarantee adequate availability/reliability operation over a reasonable time span and safe operation and minimization of radioactive waste.
At present there are two main DEMO design options: the first corresponds to a large, modest power density, pulsed device with a conventional plasma scenario, with a conservative design based on expected performance of ITER. The second to a device with higher power density and steady-state operation. Its design should at the moment be based on optimistic, advanced assumptions—therefore with higher risks than the first option, since extrapolations go much further.
Clearly control requirements for DEMO will not only be different with respect to those for ITER, but also they will depend on the detailed strategy chosen. Control needs for a steady state high beta device are very different in comparison to those for a pulsed machine. As for the case where we start this chapter, i.e. aircrafts, mission will define the design requirements for an integrated control system. DEMO will have a restricted operating space, based on the outcome of previous experiments and models, will have a very small set of sensors, both for the sake of easy maintainability and because of the hostility of the environment. Controls need to be not only integrated, but also reduced to the bare minimum. Therefore, it is expected that while control of ELMs, of fast particle driven MHD and reaction to off-normal events will be common to both, the pulsed approach will need more focus on NTM and sawtooth control, while in the steady-state, high beta DEMO RWMs will be key actors to address.
10.5 Conclusions
We started this chapter with the story of the Wright brothers, from a bike shop to flying the first airplane. The path to fusion has several analogies with that story and in general with the evolution of aviation. Being aware of the risks of oversimplification, it is nonetheless tempting to say that running present day tokamaks has some analogy to riding a bike. We have accumulated a large experience and we do it rather safely and achieve good performance—though in both cases we need to protect ourselves against unpredictable events and we still need to understand some details of the physics. But the next step to ITER, and even more to DEMO, will be qualitatively different. As the Wright first airplane, ITER will be the first fusion device to “fly”, i.e. to demonstrate that fusion works. DEMO will bring fusion to its commercial exploitation, like modern airplanes do for aviation.
As it happened for airplanes, more than trying to completely avoid instability, it will be crucial to learn how to live with it and control it and whenever possible how to exploit it. This is why integrated control will need not only integration of various sensors and actuators, but also the ability of integrating experiments, simulations and modelling and of recognizing that, as for the airplanes, a broad experimental basis will be necessary.
Notes
- 1.
Besides of course the stellarator configuration, which is outside the scope of this book.
- 2.
A comparison that was suggested to me by Tim Hender: the weight force of an Airbus 380 airplane is about 5.5 MN, while the displacement (weight) of a medium size ship is about 50 MN.
References
T.C. Hender et al., IAEA Fusion Energy Conference 2002—Paper EX/P2-22, http://www-pub.iaea.org/mtcd/meetings/pdfplus/fusion-20-preprints/EX_P2-22.pdf
P. Martin et al., Nucl. Fusion 51, 094023 (2011)
J. Hanson et al., Accepted for publication in Physics of Plasmas (2014)
P. Piovesan et al., Phys. Rev. Lett. 113, 045003 (2014)
C. Gormezano et al., Nucl. Fusion 47, S285 (2007)
A. Loarte et al., J. Nucl. Mater. 313–316, 962 (2003)
Hender T.C. et al., Nucl Fusion 47 S128
S. Von Goeler, W. Stodiek, N. Sauthoff, Phys. Rev. Letters 33, 1201 (1974)
F. Porcelli, D. Boucher, M. Rosenbluth, Plasma Phys. Control. Fusion 38, 2163 (1996)
I.T. Chapman, Plasma Phys. Control. Fusion 53, 013001 (2011)
Z. Chang, J.D. Callen, E.D. Frederickson, R.V. Bud-ny, C.C. Hegna, K.M. McGuire, M.C. Zarnstorff, TFTR Group, Phys. Rev. Lett. 74, 4663 (1995)
O. Sauter et al., Phys. Plasmas 4, 1654 (1997)
H. Zohm et al., Plasma Phys. Control. Fusion 45, A163 (2003)
F. Wagner et al., Phys. Rev. Lett. 49, 1408 (1982)
J.W. Connor, Plasma Phys. Control. Fusion 40, 531 (1998)
E. la Luna de et al.,in 23th IAEA Fusion Energy Conference, Paper EXC/8-4 (2010)
T.E. Evans et al., Nature Phys. 2, 419 (2006)
Y. Liang et al., Phys. Rev. Lett. 98, 265004 (2007)
A. Kirk et al., Nucl. Fusion 50, 034008 (2010)
J.M. Canik et al., Nucl. Fusion 50, 034012 (2010)
M. García-Muñoz et al., in IAEA FEC 2012, Paper EX/P6-03 (2012)
A. Bondeson, D.J. Ward, Phys. Rev. Let. 72, 2709 (1994)
M.S. Chu, M. Okabayashi, Plasma Phys. Control. Fusion 52, 123001 (2010)
P. Brunsell et al., Phys. Rev. Lett. 93, 225001
M. Baruzzo et al., Nucl. Fusion 52, 103001 (2012)
Y. In et al., Plasma Phys. Control. Fusion 52, 104004 (2010)
Zanca et al., PPCF 54, 094004 (2012)
G. F. Matthews et al. in Fusion Energy 2002 (Proc. 19th Int. Conf. Lyon, 2002) (Vienna: IAEA) Paper EX/D1-1, http://www-pub.iaea.org/mtcd/publications/pdf/csp_019c/pdf/exd1_1.pdf
M. Sugihara et al., Disruption scenarios, their mitigation and operation window in ITER Nucl. Fusion 47, 337 (2007)
S. Putvinski et al., in 2010 IAEA FEC, Paper ITR/1-6
W.W. Heidbrink, G.J. Sadler, Nucl. Fusion 34, 535 (1994)
H.H. Duong et al., Nucl. Fusion 33, 749 (1993)
R.B. White et al., Phys. Plasmas 2, 2871 (1995)
S.K. Nielsen et al., Plasma Phys. Control. Fusion 52, 092001 (2010)
R.J. Goldston, R.B. White, A.H. Boozer, Phys. Rev. Lett. 47, 647 (1981)
A. Fasoli et al., Plasma Phys. Control. Fusion 52, 075015 (2010)
B.N. Breizman et al., Phys. Plasmas 10, 3649 (2003)
C.C. Petty et al., in Proceedings of 23rd International Conference on Fusion Energy 2010 (Daejon, Korea Rep., 2010)
R. Lorenzini et al., Nature Phys. 5, 570 (2009)
S. Guenter et al., Phys. Rev. Lett. 87, 275001 (2001)
G. Matsunaga et al., Phys. Rev. Lett. 103, 045001 (2009)
O. Sauter, M. Henderson, G. Ramponi, H. Zohm, and C. Zucca, Plasma Phys. Controlled Fusion 52, 025002 (17 pp) (2010)
J. Snipes, in MHD and Plasma Control in ITER, Talk Given at the 4th ITER International Summer Schhol on MHD and Plasma Control, Austin 2010, http://w3fusion.ph.utexas.edu/ifs/iiss2010/iisstalks/Snipes_Joseph_talk.pdf
F. Volpe et al., Phys. Plasmas 16, 102502 (2009)
R. Bartiromo et al., Phys. Rev. Lett. 83, 1779
Goodman et al., PRL 106 (2011)
T.P. Goodman et al., Phys. Rev. Lett. 106, 245002 (2011)
D.A. Humphreys, in High Reliability Operation and Disruption Control in Tokamaks, Talk Given at the 4th ITER International Summer Schhol on MHD and Plasma Control, Austin 2010, http://w3fusion.ph.utexas.edu/ifs/iiss2010/iisstalks/Humphreys_David_talk.pdf
G. Marchiori et al., Nucl. Fusion 52, 023020 (2012)
Y. Liu et al., Plasma Phys. Control. Fusion 52, 104002 (2010)
JT-60SA, Research Plan version 3.1, (Dec 2013). http://www.jt60a.org/b/index_nav_3.htm?n3/operation.htm
P. Martin, Fusion Sci.Technol. 59, 602–616 (2011)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2015 Springer-Verlag Berlin Heidelberg
About this chapter
Cite this chapter
Martin, P. (2015). Perspectives for Integrated Control. In: Igochine, V. (eds) Active Control of Magneto-hydrodynamic Instabilities in Hot Plasmas. Springer Series on Atomic, Optical, and Plasma Physics, vol 83. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-662-44222-7_10
Download citation
DOI: https://doi.org/10.1007/978-3-662-44222-7_10
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-662-44221-0
Online ISBN: 978-3-662-44222-7
eBook Packages: Physics and AstronomyPhysics and Astronomy (R0)