
Abstract
The goal of nuclear fusion using magnetic confinement is to confine a plasma consisting of hydrogen isotopes and heat it to temperatures that allow the energy released from the fusion reactions to largely compensate the energy loss from the plasma due to convection, conduction and radiation so that stationary nuclear burning of the fuel is achieved with net energy output. Presently, the reaction envisaged is the fusion of Deuterium and Tritium, which releases the fusion power P fus in He nuclei (\(\alpha\)–particles) of 3.5 MeV and neutrons of 14.1 MeV. In this chapter, we discuss optimization of power balance for this reaction in conventional and advanced tokamak regimes.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others

Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1.1 Plasma Conditions Needed for Nuclear Fusion
The goal of nuclear fusion using magnetic confinement is to confine a plasma consisting of hydrogen isotopes and heat it to temperatures that allow the energy released from the fusion reactions to largely compensate the energy loss from the plasma due to convection, conduction and radiation so that stationary nuclear burning of the fuel is achieved with net energy output. Presently, the reaction envisaged is the fusion of Deuterium and Tritium, which releases the fusion power P fus in He nuclei (α-particles) of 3.5 MeV and neutrons of 14.1 MeV. The α-particles must be confined in the magnetic field so that they can heat the plasma by collisional slowing down, providing the α-heating P α , while the neutrons will deposit their energy in the first wall. Since the energy is distributed between the two reaction partners according to their mass ratio, the relation P α = 1/5 P fus holds.
The plasma parameters needed for this state are determined by the energy balance, i.e. the α-heating should compensate the losses due to convection, conduction and radiation. In the absence of a first principles theory describing the convective and conductive losses, these are parametrised by the energy confinement time τ E = W plasma /P loss , where W plasma ~ nT is the kinetic energy stored in the plasma and P loss the power needed to compensate the energy losses. Assuming that the radiative losses are only due to the unavoidable Bremsstrahlung emitted by the hot plasma, the criterion can be written as
where n is the particle density, and T the temperature. The function f (T) exhibits a broad minimum around T = 20 keV.Footnote 1 In this range, the fusion power roughly scales as P fus ~ (nT)2 and hence the figure of merit for generation of fusion power Q = P fus /P ext , where P ext is the external heating power needed to compensate the energy loss from the plasma, can be written as
Clearly, in present day experiments, P loss >> P α , and inserting the definition of P loss the figure of merit becomes Q ~ nTτ E , while for dominant α-heating, Q → ∞, which is strictly only true for ignition, but in praxi some external power will always be needed for control of the plasma state. Thus, making use of (1.1), for present day devices, usually the figure of merit
is used where the temperature has been assumed to be in the optimum range of 20 keV. In the following, we will discuss the strategies to reach this number in tokamaks, given the boundary conditions set by various operational limits which are the subject of this book.
1.2 Optimisation of Tokamak Operational Scenarios
1.2.1 Tokamak Operational Limits
The tokamak device is presently the magnetic confinement configuration that has reached the highest plasma performance in terms of nTτ E . It is a toroidal configuration characterized by a strong toroidal field, typically of the order of 1–5 T, generated by external field coils and a weaker poloidal field component created by a toroidal current, of order 1 MA in present day devices and up to 15 MA in ITER, that is usually induced by a central solenoid through transformer action. The superposition of these two fields provides a helical structure of field linesFootnote 2 forming magnetic surfaces on which pressure is constant, but varies radially from high values in the centre to low values at the plasma edge. More details on the magnetic configuration of a tokamak can be found in Chap. 2 of this book. For a given device, i.e. fixed size, characterized by minor radius a and major radius R of the torus and given value of toroidal field, the optimization of nTτ E mainly concerns the choice of a proper operational scenario. This is restricted by several operational limits that define the possible operational space, where limits are given by the occurrence of deleterious MagnetoHydroDynamic (MHD) instabilities that are discussed in detail in this book. MHD instabilities in tokamaks are driven by the free energy available from the gradients of the toroidal current density, the kinetic plasma pressure and the pressure of fast (i.e. suprathermal) particles. In linear theory, these instabilities are described by a stability boundary for their onset, but their nonlinear evolution will determine if they represent a performance limiting instability that has to be avoided as is the case for the disruptive instability described in Chap. 7 or a limit cycle that leads to a dynamic state of self-organization such as for the sawteeth described in Chap. 4 or the Edge Localised Modes (ELMs) treated in Chap. 5. The typical time scales for the growth of MHD instabilities depends strongly on the underlying physics: for ideal MHD instabilities, meaning that the plasma can be regarded as an ideal electrical conductor and hence conserves magnetic flux, it is given by inertia. Due to the small mass of the plasmas under consideration, this so-called Alfvén time scale is rather fast, of the order of μs, and can only be controlled actively if slowed down by conducting structures close to the plasma. Conversely, MHD instabilities whose growth involves finite resistivity will grow on a much longer time scale, of the order of ms to 10 s of ms in present day experiments and even longer in future big devices. Resistive instabilities are hence directly accessible by control methods involving coils or additional current drive as will be discussed throughout this book. In the following, we give a rough outline how these limitations restrict the operational space and hence determine the optimization strategies for tokamak discharges. Active control of MHD instabilities, the main topic of this book, will hence widen the operational space or guarantee safe operation close to such a limit.
Since the temperature for the minimum value of nTτ E is fixed to the above mentioned 20 keV by the balance of reaction rate and Bremsstrahlung losses, the main parameters to consider for optimization are n and τ E . Increasing the density in a tokamak is limited by the so-called density limit, i.e. the occurrence of resistive tearing modes due to a steepening of the current density profile due to excessive edge cooling when n is increased. Empirically, this limit has been found to be proportional to the plasma current I p through the so-called Greenwald limit n max < n GW = I p /(πa 2) where a is the plasma minor radius. Hence, this limitation calls for operation at high I p .
A similar strategy results from the optimization of the energy confinement time τ E . Although there is no first principles theory to predict the value of τ E due to the fact that it is mainly determined by gradient driven turbulent transport, empirical scalings derived from a large number of tokamaks clearly indicate an approximately linear scaling τ E ~ I p , providing another strong motivation to run a tokamak at high plasma current.
However, for given toroidal field, the plasma current I p is limited by the Kruskal-Shafranov limit that states that the edge safety factor q a ~ a 2 /R B t /I p must not be lower than q a = 1 since then, the plasma is unstable to an ideal external kink mode. In praxi, this limit is more restrictive since without active control, an external kink mode will already occur at q a = 2 (see Chap. 2).Footnote 3 Moreover, there is a tendency for disruptions to occur more often with higher current, particularly in the window q a < 3. Hence, while high current is definitely desirable from the point of view of optimizing nTτ E , there will be a maximum allowable current set by the minimum tolerable q a .
Finally, when optimizing nTτ E , there is also a limitation to the maximum achievable pressure p = nT in the form of a limit to the dimensionless number β, which is the ratio of kinetic to magnetic pressure. This so-called β-limit, described in its various aspects in Chaps. 2, 6 and 8 of this book, will, for given toroidal field, limit the achievable β to the order of a few per cent. In ideal MHD, it is usually given by an external kink mode that is driven by a combination of pressure and current gradient. It was mentioned above that, due to its ideal nature, this instability will grow too fast to be accessible by feedback control, but its growth can be slowed down by nearby conducting structures that, for sufficient inductive coupling, will slow down the growth rate to the inverse of the resistive time scale of the wall, converting the ideal kink to the Resistive Wall Mode (RWM) treated in Chap. 6 of this book. For ideal MHD modes, the ideal β-limit can be described as a limit to the so-called normalized β, β N = β / I p /(aB). It has been found that β N,max is a function of the shape of the profile of toroidal current, with peaked current profiles being more stable than broad ones because it is mainly the edge current that drives the kink mode unstable. We mention here that the introduction of finite resistivity effects leads to an additional stability boundary, usually with β N,max values lower than the ideal limit, set by the Neoclassical Tearing Mode (NTM) treated in Chap. 8.
1.2.2 Conventional Tokamak Scenarios
From these considerations, a commonly used strategy for a tokamak scenario reaching optimum nTτ E is the following: for given size, geometry and toroidal field, the plasma current should be as high as allowed by the q a limit. In praxi, this will be around q a = 3. The density is set to a value that is below the density limit, n < n GW ,Footnote 4 and β is raised to a value β N < β N,max. The current profile will be peaked in the center, consistent with the tendency of ohmically driven current to have the largest current density where the plasma is hottest due to the decrease of electrical resistivity with temperature, η ~ T 3/2. Here, the condition that q > 1 everywhere in the plasma will limit the central current density due to the occurrence of the sawtooth instability described in Chap. 4 when q(0) is below 1. In fact, the baseline operation scenario for ITER, aimed at achieving Q = 10, i.e. dominant α-heating P α = 2 P ext , follows precisely this strategy, also known as ‘conventional tokamak scenario’. We mention here that such a scenario will also have to be examined with respect to fast particle driven instabilities as described in Chap. 9 such that the α-particles are confined well enough to provide central heating by classical slowing down. For all the limits described above, active control will act either to extend the limitation or to allow operation close to the limit with the possibility to recover the operational point should one of the limits be violated transiently.
1.2.3 Advanced Tokamak Scenarios
There is, however, an important change in optimization strategy when also the pulse length is introduced in the optimization. It is clear that a tokamak scenario that has an inductively driven component of the plasma current will be pulsed since at some point, the transformer flux that is used to compensate the resistive loss in the plasma is exhausted. On the other hand, a fusion reactor preferably has to operate under stationary conditions or at least have a reasonable duty cycle and for the reason just given, the boundary condition of long pulses calls for a large fraction of the plasma current to be driven non-inductively. External current drive systems that are also used to heat the plasma have a relatively low current drive efficiency I p /P ext so that this optimization strategy usually relies on a large component of the so-called bootstrap fraction, which is a toroidal current occurring in a toroidal magnetic confinement system due to a thermo-electrical effect. It can be shown that the bootstrap current density is roughly proportional to the radial pressure gradient, so that f bs , the fraction of total current supported by the bootstrap effect, becomes
where β p is the so-called poloidal beta, i.e. the average kinetic pressure normalized by the poloidal magnetic field B pol at the plasma edge. Different from the optimization strategy introduced above, so-called ‘advanced tokamak scenarios’ aim at lowering the plasma current I p since for given kinetic pressure, β p ~ 1/I 2 p . The concomitant loss of confinement time (remember τ E ~ I p ) must then be recovered by improving confinement by other means, e.g. the creation of transport barriers in which turbulence is suppressed and pressure gradients are higher than in the core of a conventional scenario. Furthermore, c bs depends on the current profile such that a broader profile will have higher c bs , which, as outlined above, will lower the ideal β-limit with respect to the value for a conventional tokamak scenario. Hence, the RWM and its active control, treated in Chap. 6, become very important for the success of advanced tokamak scenarios and generally, it is expected that the control requirements for such a scenario will be more stringent than for a conventional scenario.
Finally, we mention another serious boundary condition for any tokamak scenario to be applied in a future fusion reactor which is the exhaust of power and particles. The power leaving the plasma across the last closed flux surface will hit the first wall in a narrow band, streaming along the ‘open’ field lines towards the wall.Footnote 5 In order to mitigate these heat loads, the absolute value of the density at the plasma edge and on the open field lines will have to be as high as possible, and this means that lowering the plasma current which implies a lower absolute value of the density (remember n GW ~ I p ) will amplify the exhaust problem. While not treated in this book, this will ultimately set another stringent boundary condition on the operational space of a fusion reactor based on the tokamak principle.
1.3 Summary
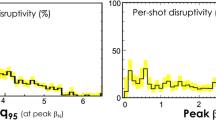
In summary, tokamak operational space is restricted in various parameters by the occurrence of MHD instabilities and active control of these instabilities will help to optimize the fusion performance of future tokamak fusion reactors. The optimization strategies for the two approaches to a tokamak operational scenario outlined above, namely the ‘conventional’ and the ‘advanced’ scenarios, proceed along different routes, putting different weight on the individual limits and the need to actively control the instabilities giving rise to these limits. The situation is summarized in the diagrams in Fig. 1.1 for conventional scenarios on the left and advanced scenarios on the right.

Optimization strategies for conventional (left) and advanced (right) tokamak scenarios, showing the role of the different limitations to operational space discussed in this book
Notes
- 1.
In plasma physics, the temperature is usually expressed in terms of the thermal energy, i.e. kBT, where 1 eV corresponds to 11,600 K.
- 2.
In a single particle picture, the field lines must be helical to compensate for losses induced by the drift of charged particles in a purely toroidal field.
- 3.
Recent experiments on the RFX reversed field pinch, when run as a tokamak, have clearly demonstrated that with adequate feedback control by additional coils, a tokamak discharge can in principle be run at qa < 2.
- 4.
For typical parameter values of present and future tokamaks, this will roughly be of the order of 1020 m−3.
- 5.
This region is usually called the Scrape Off Layer (SOL) and the interaction with the wall will occur in the ‘limiter’ or ‘divertor’ zone.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2015 Springer-Verlag Berlin Heidelberg
About this chapter
Cite this chapter
Zohm, H. (2015). Introduction to Tokamak Operational Scenarios. In: Igochine, V. (eds) Active Control of Magneto-hydrodynamic Instabilities in Hot Plasmas. Springer Series on Atomic, Optical, and Plasma Physics, vol 83. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-662-44222-7_1
Download citation
DOI: https://doi.org/10.1007/978-3-662-44222-7_1
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-662-44221-0
Online ISBN: 978-3-662-44222-7
eBook Packages: Physics and AstronomyPhysics and Astronomy (R0)