
Abstract
As well as optimizing conventional drive concepts, motor vehicle manufacturers also rely on alternative concepts in order to ensure that existing and future noise and emission restrictions are complied with and reduce fuel consumption. The use of hybrid cars as a means of reducing environmental pollution and increasing driving pleasure and comfort is becoming increasingly popular.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
As well as optimizing conventional drive concepts, motor vehicle manufacturers also rely on alternative concepts in order to ensure that existing and future noise and emission restrictions are complied with and reduce fuel consumption. The use of hybrid cars as a means of reducing environmental pollution and increasing driving pleasure and comfort is becoming increasingly popular.
A design which combines electric motor(s) with an internal-combustion engine makes it possible to use smaller engines (downsizing) and other consumption-reducing measures such as stopping the engine at traffic lights, operating the engine within the optimum efficiency range, and recuperative braking. Hybrid drives allow most of the basic weaknesses of electric or internal-combustion engine drive concepts to be eliminated.
Drive concepts
Definition
Hybrid cars are vehicles whose accelerative force is provided by more than one source. These drive sources obtain the energy that is required from a variety of sources. The term that is currently used to describe these vehicles is HEV (Hybrid Electrical Vehicle), i.e. the combined design of an internal-combustion engine with one or two electric motors and the associated energy accumulators (fuel tank and battery).
Types of hybrid drive
A distinction is made between two basic structures:
-
serial and
-
parallel hybrid drives.

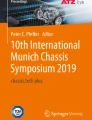
1 Internal-combustion engine
2 Fuel tank
3 Alternator
4 Electric motor
5 Inverter
A design which combines both structures is described as a split-power hybrid drive.
Serial hybrid drive
The series connection of the energy converters is indicative of a serial hybrid concept. The serial arrangement of the hybrid components requires two electric motors and an internal-combustion engine. An electric motor operates as an alternator, and the other as an engine. The internal- combustion engine is not connected to the drive. It charges the battery via the alternator and/or provides the electric motor with the required energy directly.
All of the power that is needed to move the vehicle is therefore transmitted to the drive shaft by the electric motor.
An advantage of this arrangement is that the internal-combustion engine can be operated almost stationary, i.e. within its optimum efficiency range. Because there is no mechanical connection, the electric motor and the internal-combustion engine can be installed in different locations.
One disadvantage of this arrangement lies in the multiple energy conversions and associated loss of efficiency. If you examine the normal mean loss of the individual components, a total loss of about 30% must be assumed.
It has only been possible to make meaningful use of serial drive concepts since the mid-80’s. Until this time, neither electrical machines nor storage media with the required capacity for realizing serial concepts were available.
A serial hybrid system is used in the Toyota Coaster (Bus) Hybrid, for example. Other usage areas for the serial hybrid drive are diesel trains and busses that frequently travel in stop-and-go traffic in urban areas. The serial hybrid drive is not used in passenger cars, however.
Parallel hybrid drive
The term “parallel hybrid drive” is used to describe an arrangement of hybrid components in which the electric motor and the internal-combustion engine can both individually deliver their output to the drive. If necessary, the outputs can be combined by means of mechanically coupling the motor and the engine to the drive. The possibility of power addition allows the machines to be made with relatively small dimensions without adversely affecting the driving performance. The components that are required are designed according to the most frequent area of use.
There are different types of implementation. The electric motor can be directly flanged to the crankshaft (crankshaft- mounted starter-alternator) or coupled to the internal-combustion engine by a belt drive. Both drive sources can be used together or individually to propel the vehicle. Since only one electric motor is incorporated in the system, the vehicle cannot be electrically powered whilst the battery is being charged. The electric motor can only operate as an alternator or for drive purposes.
If a coupling is integrated between the electric motor and the internal-combustion engine (Fig. 2), the engine does not have to be carried along when the vehicle is being propelled using purely electric power. Drag torque losses can therefore be avoided.

1 Internal-combustion engine
2 Fuel tank
3 Electric motor/ alternator
4 Coupling
5 Inverter
6 Battery
The drive-side positioning of the electric motor, i.e. directly on the drive shaft downstream of the transmission, makes it possible to prevent transmission efficiency losses.
Split-power hybrid drive
The split-power hybrid drive arrangement (Fig. 3) is a combination of the two principles that were mentioned previously.

1 Internal-combustion engine
2 Fuel tank
3 Planetary gear
4 Electric motor
5 Inverter
6 Battery
The use of a split-power transmission (planetary gear system) allows some of the internal-combustion engine power to be relayed directly to the drive, i.e mechanically, whereas the other part is converted into electrical energy via the alternator and optionally stored in the HV battery (high-voltage battery) or directly relayed to the driving electric motor downstream of the transmission.
Both the electric motor and the internal- combustion engine can be used as drives in this combined design. The most consumption-efficient drive method is used for the prevailing operating conditions. Both drives can also provide their power simultaneously for propelling the vehicle. It is also possible to use electricity only.
The use of the planetary gear system in combination with the alternator as a torque support allows the operating point of the internal-combustion engine to be varied within its optimum range, similarly to a combination with a CVT transmissionFootnote 1. The planetary gear system is one of the main component parts of the split- power hybrid concept. No additional transmission is required for the internal- combustion engine.
This is a form of the strong hybrid that is used in the Toyota Prius, for example.
Use of internal-combustion engine and electric motor in the different hybrid systems
In the serial hybrid, the internal-combustion engine supplies the electric motor with energy. The vehicle is only propelled by the electric motor.
The parallel hybrid with an electric motor fixed to the crankshaft uses the internal- combustion engine as its main energy source. The electric motor is used for assistance during acceleration. Otherwise it is mainly the internal-combustion engine that is used.
In the parallel hybrid that can use electric power only, the electric motor is used more frequently and the internal-combustion engine less frequently than in a parallel hybrid with an electric motor fixed to the crankshaft.
In a split-power hybrid, the output of the internal-combustion engine is apportioned. This process is infinitely variable. For this reason the electric drive continuously operates when the vehicle is being propelled by the internal-combustion engine, without affecting the frequency at which purely electric propulsion is used.
Hybrid drive classification
Figure 4 shows an example of classification according to degree of hybridization. The engine start-stop, recuperative braking, boosting (electric motor support) and electric-only propulsion methods that are shown can be realized using the following hybrid concepts. It remains to be said that both the structural and financial cost and the fuel-saving potential can vary considerably depending on the concept that is used.

The way in which the electrical and internal-combustion engine components are combined and interconnected is another means of distinguishing between types of hybrid. A distinction is also made between the degree of hybridization and the type of energy flow. The operating strategy that is used is another distinguishing feature. There are no fixed definitions or names for the many distinguishing features. They depend on the respective vehicle manufacturer or supplier.
Micro Hybrid (start/stop system)
The simplest form and the first step in the direction of hybrid vehicles is the micro hybrid, e.g. a starter/alternator system with start/stop function. In this system the starter and the alternator are replaced with an electrical machine. The internal- combustion engine is switched off when the vehicle stops. When the vehicle sets off again it is quietly accelerated to idle speed by the electrical machine, and then the ignition is activated. In the simplest micro hybrid system, the conventional starter is replaced with a starter that has been optimized for start-stop functionality. These systems generally only have a small energy accumulator and comparatively little electrical power.
Mild Hybrid
If this system is combined with the start/ stop, booster (internal-combustion engine assisted by the electric motor when starting off and accelerating) and brake energy recovery strategies, it is usually referred to as a mild hybrid concept. Electric propulsion is possible for an extremely short time in combination with cylinder shutoff, but the internal-combustion engine must also be carried along.
The electric motor can be directly flanged to the crankshaft in a mild hybrid. In mild hybrid systems, additional electrical energy of up to 20 kW is provided by the electric traction accumulator (battery). This is mainly used for starting off and accelerating at low engine rpm.
Strong Hybrid
Strong hybrid systems make it possible to drive in urban traffic using electrical energy only and therefore without producing emissions. The traction accumulator of these systems is more powerful than those of the above-mentioned micro hybrid and mild hybrid variants. It has a typical output of about 25 to 50 kW.
The mild hybrid system is more expensive to implement than other hybrid systems. On the one hand, the vehicle electrical system has to be adapted to the voltages and currents that are required, and on the other hand, additional components such as couplings and transmissions are needed to ensure that the vehicle can be propelled using electric power only. Examples of strong hybrid systems are the parallel hybrid with two couplings (Fig. 2) and the split-power system such as the one used by Toyota (Fig. 3).
Operating strategies for electric hybrid vehicles
The integration of electrical components in the drivetrain has wide-ranging effects on the overall vehicle system. Because of the complexity of the drivetrain in an electric hybrid vehicle (HEV: Hybrid Electric Vehicles), system solutions with mutually coordinated components are of special significance. As well as having a favorable combination of appropriate components, the optimization of the operating strategy is the most important task in order to achieve the goals of reducing consumption and emissions while increasing driving pleasure and driving comfort. HEV functions that reduce consumption and emissions are start/stop operation of the internal-combustion engine, recuperative braking and operating point optimization.
The electric propulsion function is an important constituent of operating point optimization. Booster operation of the electric drive can increase the torque and therefore provide improved acceleration capability, particularly at low engine rpm. An integrated examination of design and strategy optimization is required in order to utilize the maximum potential. In this case, operating strategy means a driving situation-dependent torque distribution between the two drive sources of internal- combustion engine and electric motor.
Figure 5 shows the networking of the individual components in the drivetrain using the example of a vehicle with a parallel hybrid drive. The entire system is coordinated by a supervisory hybrid controller. This involves battery management, engine management, electric drive management, transmission management and brake system management. It becomes clear that the development of these control systems (particularly the supervisory hybrid controller) and the development of the components have to be closely interlinked in order to achieve optimum functionality.

A Actuator S Sensor
Influence of operating strategy on the design of the internal-combustion engine
Use of suitable internal-combustion engines
Any internal-combustion engine from vehicles with a conventional drivetrain can generally be used in a hybrid vehicle. Gasoline, natural gas and diesel engines can be combined with an electrical drive, but with differing optimization targets (see sections “Operating strategy for diesel hybrid vehicles/gasoline hybrid vehicles”).
The additional possibilities provided by the HEV combination with regard to operating point adjustments, for example, can be pursued for hybrid vehicles and other internal-combustion engine concepts, as well as for conventionally propelled vehicles. Because the operating range has been made smaller, the efficiency optimization that is needed can be restricted to this area and the high costs of providing additional components can be avoided.
If an adequate amount of power is provided by the electrical accumulator, the electric drive can compensate for torque deficits and slower response behavior found in certain internal-combustion engine concepts.
The dynamic requirements that are made of the drivetrain are realized by combining the electric drive and the internal-combustion engine. The torque characteristic, which is particularly favorable at low engine speeds, and the rapid response behavior of the electric drive relieve the strain on the internal-combustion engine during dynamic processes. Internal-combustion engine peak loads can therefore be avoided.
Internal-combustion engine friction optimization
Part of the primary energy reduction in a hybrid vehicle is achieved by reclaiming braking energy (recuperation). This can be carried out during active braking and under overrun conditions, e.g. when driving downhill. In order to make maximum use of this saving potential, the internal-combustion engine must be shut down in these operating ranges. If this is not possible, the engine must be carried along and its drag friction restricts the recuperation potential. In this case, optimizing the friction of the engine represents an important internal-combustion engine requirement.
Emission and fuel consumption optimization
In order to achieve emission and consumption reduction targets, degrees of freedom for internal-combustion engine operation can be exploited that depend on the topology of the drivetrain.
Avoiding operating points where the internal-combustion engine is less efficient or has high emissions is an important strategy. The basic operating strategy must be optimized with regard to the improvement target (e.g. consumption reduction and CO2 or NOx reduction). The modified operating conditions can be exploited to optimize the internal-combustion engine concept and the exhaust-gas treatment. The modified requirements result in changes to the functionality and application of the engine management system that are not examined in further detail at this point.
A requirement currently exists for improvements to be made in vehicles with diesel engines with regard to NOx and particulate emissions. Improvements can be achieved here by shifting the engine operating points in lower emission ranges.
If a gasoline or natural gas engine is used, the operating strategy is designed to save fuel and reduce CO2 emissions.
Operating strategy for diesel hybrid vehicles
Particularly in part-load operation, vehicles with lean combustion concepts achieve low consumption values but have higher exhaust-gas values than vehicles with stoichiometrically operated internal- combustion engines. The main focus as far as diesel vehicles are concerned is therefore on reducing emissions. The post- combustion reduction of hydrocarbon and carbon monoxide emissions from lean internal-combustion engines using oxidation-type catalytic converters is in an advanced stage of development. Diesel par- ticulate filters with high exhaust cleaning efficiency are already being used to reduce particulate emissions. The primary goal as far as diesel hybrid vehicles are concerned is to reduce nitrogen-oxide emissions (NOX), whereby the intention is also to reduce CO2 emissions at the same time.
Figure 6 shows the best ranges in which to operate the internal-combustion engine in order to optimize NOX emissions.

a Operating point range in driving cycle
b Boost: combined operation of internal-combustion engine and electric motor
c ECVT effect: operating point relocation to faster engine speeds
Figure 6a shows the operating point range for an internal-combustion engine during a driving cycle. In the New European Driving Cycle (NEDC), internal-combustion engines are operated at low part loads and medium loads in conventional vehicles, and therefore in ranges with high NOX emissions.
Figure 6b shows a hybrid vehicle with a parallel concept that avoids low internal- combustion engine loads (unfavorable efficiency) by operating with electricity only. Since the characteristic curve ranges of low NOX emissions are at low loads, the electric motor and the internal-combustion engine should be used in conjunction (boost) in order to avoid engine operation at high loads.
The electrical energy that is required cannot usually be recovered by means of recuperation alone, and the electrical machine is subsequently operated in alternator mode. This means that the electric drive alternates between engine mode and electric mode almost continuously, depending on the cycle. A compromise must be found between two opposing goals: on the one hand, the NOX and CO2 emissions must be lowered as much as possible, and on the other hand, the energy throughput from the electric accumulator must be restricted. The energy throughput has a significant influence on the service life of the traction battery.
Figure 6c shows the situation for a split- power hybrid vehicle in which flexible use is made of the internal-combustion engine speed (within certain limits), independently of the vehicle speed (ECVT effect). Engine operating points can be relocated to faster speeds, which reduces the internal-combustion engine torques that are needed, leading to additional NOX reduction.
Because of the serial operating mode on the electrical path (simultaneous alternator operation of the first electric motor and engine operation of the other), the traction battery energy throughput and cycling can be kept lower than with a parallel hybrid.
Operating strategy and internal- combustion engine concepts for gasoline hybrid vehicles
The lowest emission values are achieved with vehicles with stoichiometrically operated gasoline internal-combustion engines due to the three-way catalytic converter technology. The lowest emissions can also be achieved with large-displacement internal-combustion engines in hybrid vehicles by using appropriate warm-up strategies. It may even be possible to reduce the demands that are made on the exhaust-gas treatment system. The main objective with the gasoline hybrid vehicle is therefore to save fuel and increase performance.
Figure 7 shows a possible internal-combustion engine operating range optimization with regard to minimal CO2 emissions for the three HEV topologies (i.e. consumption reduction).

a Operating point range in driving cycle
b Avoiding low
internal-combustion engine loads by using electrical propulsion and subsequent charging
c ECVT effect: operating point relocation to optimum energy range of drivetrain
In the New European Driving Cycle (NEDC), internal-combustion engines are operated in conventional vehicles with a low part load and therefore at sub-optimal efficiency. In vehicles with a parallel hybrid drive, low internal-combustion engine loads can be avoided by driving with electric propulsion only (Fig. 7b).
Since the electrical energy that is required cannot usually be recovered by means of recuperation alone, the electrical machine is subsequently operated in alternator mode. In comparison to a conventional vehicle, this moves the operation of the internal-combustion engine into the higher load range and therefore to a higher level of efficiency. This means that more electrical energy can be made available than with the previously described NOX strategy, making it possible to use a greater proportion of electrical propulsion. However, a compromise must be found between CO2 emissions and energy throughput because of the service life requirements that are made of the traction battery. The energy throughput has a significant influence on the service life of the traction battery.
The operating range of the internal-combustion engine in the split-power hybrid vehicle (Fig. 7c) is more restricted than it is in the parallel hybrid vehicle. It is usually operated speed-dependently when engine loading is such that it allows the entiredrivetrain to operate in the most energy- efficient way. Because of the serial operating mode on the electric path (simultaneous alternator and engine operation of both electrical machines), here too the energy throughput and cycling of the traction battery can be kept low in comparison to a parallel hybrid.
Operating point optimization: drive torque distribution
Different forms of hybrid vehicle control and different operating strategy optimizations have significant effects on fuel consumption, emissions, the amount of available torque and the design of the components (e.g. operating range of the electrical machine and the internal-combustion engine, energy throughput and cycling of the electric accumulator), since their operating points are directly dependent on the operating strategy. It has already become clear that the system-encompassing hybrid controller is extremely important. There are many options and degrees of freedom for optimizing operation. The distribution of the requested drive torque to the internal-combustion engine and electrical machine drive sources is extremely important with regard to exploiting the fuel saving potential.
Definition in the finite state machine However, torque distribution is not needed in all driving conditions. Figure 8 shows the different driving conditions of a hybrid vehicle, which are defined in a finite state machine depending on driver request, the status of the electric accumulator and vehicle speed.

The internal-combustion engine is shut down in the event of all-electric propulsion or recuperation and the maximum available torque is requested from both drive sources during boost operation. All-electric driving mode is restricted to slow vehicle speeds and low acceleration. Recuperation only occurs during vehicle deceleration. Boost operation is mainly used when maximum accelerative force is requested by the driver (kick-down).
Distribution by operating strategy The expansive scope of hybrid propulsion in which the drive torque distribution must be specified lies between the operating statuses that are defined by the finite state machine. Because of the many degrees of freedom and the large number of interdependent factors, an optimization is required that can be achieved most effectively using model-based procedures.
Figure 9 shows the operating strategy dependencies. The hybrid controller distributes the required drive torque between the drive sources of internal-combustion engine and electrical machine on the basis of vehicle speed and the status of the electric accumulator, among other things. The operating strategy also needs an equivalence value of the stored electrical energy that indicates how much fuel has been consumed in generating this electrical energy.

The different types of electrical power generation (recuperation and internal- combustion engine charging) are examined in order to assign an optimization parameter equivalence value (e.g. fuel consumption) to the energy content of the battery. This equivalence value forms the basis for deciding which energy source to use.
Power generation strategy
In a hybrid vehicle, electrical energy can be generated by means of internal-combustion engine charging and recuperation (brake energy recovery). Whereas the latter is acquired without using fuel, the former requires fuel consumption. The efficiency of this charging process depends on the current operating point of the internal-combustion engine during this process.
Since it is not usually possible to generate enough energy from recuperation alone and the battery has limited storage capability, internal-combustion engine charging is unavoidable. In order to minimize the amount of fuel that is used to do this, this type of electrical-energy generation should only be performed when the internal-combustion engine is being used in low-efficiency operating ranges and the additional load can be used to improve efficiency. The optimum utilization of the efficiency improvement during internal- combustion engine charging is an operating strategy issue, since it involves torque distribution between the internal-combustion engine and the electric machine.
Recuperative brake system
In order to make better use of a hybrid drive system, it must be possible to charge the electrical energy accumulator efficiently. An adequate amount of electrical energy must be made available for
-
The frequent internal-combustion engine repeat starts that occur under certain circumstances with the micro hybrid
-
Electric torque support or electric driving mode in mild or strong hybrid systems
The electrical energy for charging the battery can be provided by increasing the load of the internal-combustion engine or by operating the electric motor as an alternator. On the other hand, the vehicle’s kinetic energy during deceleration processes can also be used. This energy is converted to heat in conventional vehicles either by the engine-drag torque or by the vehicle service brake by operating the brake pedal.
By using the electric motor as an alternator, hybrid vehicles open up the possibility of reclaiming at least some of the energy and using it for electric consumers or the vehicle’s electric drive. This procedure us referred to as recuperative or regenerative braking .
Recuperative braking strategies
Concept
In a strong hybrid the internal-combustion engine is decoupled for recuperative braking and the drag torque is replaced by an equivalent electric motor alternator torque (drag torque simulation). The energy that is released is stored. If the internal-combustion engine cannot be decoupled (as with a mild hybrid), a lower alternator torque can be applied to the drivetrain in addition to the drag torque of the internal-combustion engine (drag torque increase).
However, taking the driving behavior into consideration, no major braking deceleration can be achieved by simulating or increasing the drag torque. The different recuperative brake torques that occur during individual braking procedures and the resulting braking power variations are problematic. These must be adapted to the battery charge level and the thermal load of the electric drive. If significant battery temperature increase occurs after several braking procedures, the recuperative output may need to be reduced in order to prevent the system from overheating.
Cooperative recuperative brake system
In order to exploit more kinetic energy, the service brake system must be modified at higher braking deceleration levels. This is done by replacing some or all of the service brake friction torque with recuperated brake torque without changing the vehicle deceleration with the brake pedal position in the same position and using the same amount of pressure. This is achieved in the cooperative recuperative brake system by making the vehicle controller and the brake system interact in such a way that the friction brake torque is always reduced by exactly the amount of alternator brake torque that can be replaced by the electric motor.
Requirements
A cooperative recuperative brake system must be able to perform the following requirements:
-
Determine driver braking deceleration request
-
Maintain the service brake performance capability and operation that is usual in conventional vehicles
-
Determine a suitable brake torque distribution between the friction brake and the recuperative brake, taking stability, comfort and efficiency criteria into consideration
-
Determine a suitable brake torque distribution between the vehicle axles
-
Adjust the friction brake torque
Replacing the recuperative brake torque with the friction brake torque requires a suitable data interface between the drive- train and the brake control unit.
Cooperative braking maneuver The maximum alternator torque that can be achieved by the electric motor changes continuously over a wide speed range during braking (Fig. 10). This is due to the fact that the output of the electric motor (i.e. torque * speed) is constant within this range. The electric motor only has a constant maximum torque range at slow speeds. If the speed becomes even slower, the recuperative brake torque that can be achieved drops back down to zero.

There must be constant torque at the wheels in order to have constant vehicle braking deceleration. If the electric motor that is being operated as an alternator is utilized up to its limit torque, the friction brake torque must be continuously reduced as the speed drops due to the fact that the alternator torque increases. Figure 11 shows an example of the braking procedure of a split-power hybrid. At the beginning of the maneuver, the alternator torque is increased until it reaches its maximum (if this corresponds to the required total brake torque). Towards the end of the braking maneuver, the alternator torque is reduced and completely replaced with friction braking torque because the electric motor cannot provide any more alternator torque at extremely low rpm (Fig. 10).

Friction brake torque reduction and increase, and replacement with alternator brake torque
When braking from a fast speed to a standstill, the distribution between friction brake torque and recuperative brake torque is continuously adjusted if the pedal is operated with constant pressure.
Braking-force distribution
Like conventional brake systems, when a recuperative brake system is being designed, the braking-force distribution between the front axle and the rear axle is extremely important for the directional stability of the vehicle. The normal force on the wheels of the front axle increases together with braking deceleration, whereas the normal force on the wheels of the rear axle decreases.
If the electric motor is connected to the wheels of the front axle, additional wheel torque can be transmitted at the front axle as the braking deceleration and therefore the normal force increases. The friction value utilization at the front axle should therefore not increase the friction value utilization of the rear axle in order to obtain directional stability.
If the vehicle has rear-wheel drive or an electrically powered rear axle (i.e. internal-combustion engine at the front axle and electric motor at the rear axle), the amount of recuperative torque that can be applied decreases as the braking deceleration increases.
The electrical output of the battery has a major influence on the use of recuperation, since it is the restrictive element for the uptake of electrical energy from vehicle movement. As the output from the energy accumulator increases, the maximum possible recuperative braking deceleration increases. However, for reasons of vehicle stability, a large alternator braking torque can only be transmitted to the front axle. High levels of recuperative braking deceleration can therefore only be achieved with a vehicle possessing front- wheel drive or all-wheel drive. In the latter case, the brake torque is distributed to both axles in such a way that it approximately corresponds to the ideal braking- force distribution of the friction brake, depending on the type of differential transmission.
Influences on stability control
Since the recuperative brake system affects braking stability, ABS and ESP control systems must be adapted to the change in automotive physics.
If unstable driving conditions are detected or the amount of brake slip is excessive, it is advisable to suppress the recuperative part of the braking and only use the friction brake system for braking deceleration and stabilization corrections. Otherwise instability and drivetrain oscillation could have a detrimental effect on the wheel slip control system.
Compared to partial braking operations, brake stabilization system interventions via the vehicle systems occur so infrequently that suppressing recuperative braking in these situations has no noticeable effect on the average consumption of the vehicle.
Friction brake implementation
There are different types of friction brake in the cooperative recuperative brake system.
These are usually mechatronic brake systems that decouple the brake pedal and the wheel brake and simulate brake pedal characteristics by adding a pedal simulator. The energy storage that is needed for brake boosting can be provided hydraulically or pneumatically.
The block diagram of the cooperative recuperative brake system (Fig. 12) is something that all versions have in common. The vehicle control system continuously monitors all relevant parameters of the hybrid drive and determines the torque that the electric motor can provide for braking. When the brake pedal is operated, the torque coordinator of the brake control unit calculates the distribution of the brake torque to the friction brake and the recuperative brake system.

No caption
The proportion of recuperative torque is fed back to the vehicle control system and relayed to the electric motor actuator. The residual brake torque is set by the friction brake while vehicle stability and wheel slip are monitored.
Electrical energy accumulators
Vehicle electrical systems of hybrid systems
Irrespective of the design of the hybrid vehicle (serial, parallel or split-power hybrid), the vehicle electrical system consists of at least two subsystems with different voltage conditions:
-
The traction power supply for supplying the electrical part of the drivetrain;
-
the nominal voltage is significantly above 42 V in this case, whereby the battery voltage can be less than the traction power supply voltage
-
The conventional 12 V vehicle electrical system for supplying the body components (power windows, radio etc.) and the internal-combustion engine (engine control unit, radiator fan, additional water pump etc.)
-
A sub-power supply with different voltage conditions if necessary
Both the traction part and the body part of the vehicle electrical system are equipped with an energy accumulator. A facility for connecting the voltage levels using a DC/DC converter is usually provided.
The provision of a power supply network with different voltage conditions and the way in which it is connected to the other sub-power supplies depends on the design of the respective hybrid vehicle.
In order to ensure that the battery operates reliably with a high voltage condition in a hybrid vehicle, a control unit (battery management system) is needed that monitors the individual battery components and controls charging and discharging, thermal management and various safety functions.
Energy accumulator requirements for traction vehicle electrical systems in hybrid vehicles
Whereas lead-acid systems are used in the 12 V vehicle electrical systems of motor vehicles for powering the starter motor, the ignition, the engine management system and the chassis components, the traction vehicle electrical systems of hybrid vehicle require additional energy storage systems. The selection of suitable electrochemical systems depends on the specific requirements:
-
High steady-state voltage of the individual cells
-
Good cold startability
-
Operation at average charge levels without affecting service life, SOC (State Of Charge) charge level approx. 60%
-
Good charging/discharging performance at average charge level
-
High efficiency in charging and discharging mode (recuperation, acceleration) at all temperatures
-
High cycle strength with as much energy throughput as possible
-
Long traction battery service life (at least the same as the vehicle service life)
-
Thermal management system
-
Easy operation and diagnosis
-
Good safety level during operation and in the event of accidents
-
Preferential use of recyclable and non- toxic materials
State of charge
The energy accumulator is operated at an average charge level in order to achieve good recuperation current absorption and good power output in order to assist acceleration. High charge levels provide high power output, and low charge levels make it possible to feed back large quantities of recuperated electrical energy.The traction battery of plug-in hybrids is fully charged from the mains power supply at regular intervals. The vehicle is operated with electricity up to a preselected average charge level, after which it is operated like other hybrid vehicles.
Thermal management The acceleration and recuperation phases alternate during vehicle operation. Even at high charge/discharge efficiency levels, this leads to heat losses that cause the battery to become warm. In order to remove the heat in a suitable way (air/liquid cooling) the battery system must have a thermal management system.
Charge quantity
During battery system selection it must be taken into consideration that only a limited charge quantity can be used during the lifetime of the battery in cycle operation; this can occur in many flat cycles with small changes to the charge level, or fewer cycles with a large discharge depth (Fig. 13). The charge quantity that can be used tends to be less with low discharge cycles.

NiMH: Nickel metal hydride system Li-Ion: Lithium ion system AGM: Absorbent Glass Mat Liquid lead: Lead-acid system/liquid battery
It must also be noted that the internal resistance of the battery increases with age, and performance deteriorates.
Energy accumulator for hybrid systems
Nickel metal hydride batteries (NiMH) are currently used as standard for hybrid vehicles. Nickel cadmium batteries are not used in modern vehicles because of the fact that the cadmium material is toxic and damages the environment.
Lithium battery systems are undergoing further development for use in hybrid vehicles.
Nickel metal hydride systems (NiMH)
Nickel metal hydride batteries are particularly useful for hybrid vehicles because designs with a high power density can be realized, given the materials that are used. The alkaline electrolyte (caustic potash solution, KOH) does not take part in the electrode reaction (compared to lead/acid systems).
Also, operation in a partially charged condition does not adversely affect the service life. High efficiency levels with high charge/discharge currents can be achieved in other charge condition ranges.
The disadvantages of the NiMH system are the high self-discharge rate and extensive power loss at low temperatures.
The relative low steady-state voltage of NiMH cells is also unfavorable. In order to achieve a battery voltage that is comparable with lead systems, approximately 1.6 times as many NiMH cells are required. In order to ensure that the entire battery system is reliable, the quality and uniformity of the individual NiMH cells must be somewhat greater.
Nickel oxide hydroxide is used as the active electrode material (as in NiCd batteries) and (instead of cadmium) a material that stores hydrogen (misch metal). Misch metal is an alloy with high lanthanum, cerium and neodymium content.
The cell is operated with slight hydrogen overpressure and has a pressure relief valve or bursting disk so that it can blow out hydrogen in critical operating conditions. During operation, it must be ensured that excessive overcharging does not occur and that ventilation facilities are provided.
Clouds of caustic alkali can be expected to occur when the overpressure is being released. The fact that hydrogen can form oxyhydrogen gas when it is mixed with air must also be taken into consideration.
Lithium ion systems (Li ions)
Compared to NiMH systems, lithium systems provide even higher energy and power densities at cell voltages of approximately 3.6 V. These systems are therefore mainly used in portable electrical systems (mobile phones, laptops), where they have essentially replaced NiMH batteries.
Efforts are currently being made to subject these cells to further development for use in hybrid vehicles. Special attention is being paid to the use of low-cost and reliable electrode materials (e.g. LiMn2O4, LiFePO4).

The comparison only provides an estimate of the basic possibilities of the different systems. Each electrochemical system can be optimized towards either energy or power within certain limits.
The use of lightweight Li metal and the properties of the other materials involved (graphite as the anode material) make it possible to manufacture extremely thin electrodes (< 0.5 mm), which can be used to create structures with extremely high output (e.g. 3 kW/kg with SOC 60%, 25°C and 10 s pulse duration). Because of the high energy content of the electrode material and the high cell voltage, special measures are required:
-
Use of organic electrolyte with special conductive minerals
-
Safety structures that prevent the cell from exploding if it becomes damaged, for example
-
Monitoring of individual cells in order to avoid overcharging and overheating
The positive electrode consists of special metal oxides (Ni, Mn, Co or mixtures thereof) that can store lithium ions. These ions can move to the counter-electrode and back during the discharging/charging process in a reversible mechanism. The counter-electrode is made from graphite and can also absorb Li ions because of its stratified structure.
Lithium-polymer batteries
A special version of the Li ion battery is the Li polymer battery. It contains electrolytes in non-liquid form This version is particularly suitable for manufacturing pliable, flexible cells. It is currently being investigated whether Li polymer batteries can be used in hybrid vehicles.
Greenhouse effect
Short-wave solar radiation penetrates the earth’s atmosphere and continues to the ground, where it is absorbed. This process promotes warming in the ground, which then radiates long-wave heat or infrared energy. Some of this radiation is reflected in the atmosphere and heats the earth.
Without this natural "greenhouse effect" the earth would be inhospitable with an average temperature of -18°C. The greenhouse gasses in the atmosphere (water vapor, carbon dioxide, methane, ozone, dinitro- gen monoxide, aerosols and cloud particles) provide average temperatures of approximately +15°C. Water vapor, in particular, retains substantial amounts of heat.
Since the beginning of the industrial age over 100 years ago, the concentration of carbon dioxide has been increasing rapidly.
The primary cause of this increase has been the burning of coal and petroleum products. In this process, the carbon bound in the fuels is released in the form of carbon dioxide.
The processes that influence the greenhouse effect within the earth’s atmosphere are extremely complex. The fact that anthropogenic emissions (i.e. caused by man) are the main cause of the climate change is disputed by another scientific theory. According to this theory, the warming of the earth’s atmosphere is being caused by increased solar activity.
There is, however, a large degree of unanimity in calling for reductions in energy consumption in order to lower carbon dioxide emissions and combat the greenhouse effect.

Notes
- 1.
With CVT transmissions (Continuously Variable Transmission) the force is transmitted via pulling media such as wide V-belts or laminated toothed chains. The main components are two axially movable V-pulleys with a pulling medium running between them. A continuous conversion ratio can be achieved.
Author information
Authors and Affiliations
Consortia
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2014 Springer Fachmedien Wiesbaden
About this chapter
Cite this chapter
Robert Bosch GmbH. (2014). Hybrid drives. In: Bosch Automotive Electrics and Automotive Electronics. Bosch Professional Automotive Information. Springer Vieweg, Wiesbaden. https://doi.org/10.1007/978-3-658-01784-2_13
Download citation
DOI: https://doi.org/10.1007/978-3-658-01784-2_13
Publisher Name: Springer Vieweg, Wiesbaden
Print ISBN: 978-3-658-01783-5
Online ISBN: 978-3-658-01784-2
eBook Packages: EngineeringEngineering (R0)