
Abstract
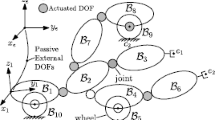
This contribution presents the main features of the ROBOTRAN programme. This programme, based on d’Alembert Potential Power Principle, permits to derive, in symbolic form, the equations of motion of mechanical systems which can be represented by a set of rigid bodies, interconnected by one degree of freedom joints; it has important applications in the fields of robotics and vehicle dynamics. The variables of the system are the generalized variables of the various joints — linear displacement for prismatic joints and angular rotation for revolute joints. Constraints can be considered and in particular those resulting from loops of bodies can be generated by means of an auxiliary programme, CINEMA. The Lagrange multipliers technique permits to derive the complete set of equations of motion; a system reduction via the elimination of these multipliers and a coordinate partioning method is possible. The obtained programme can be used as a sub-routine for any desired application such as numerical integration, stability analysis, control design, numerical linearization, eigenvalues determination.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Preview
Unable to display preview. Download preview PDF.
Similar content being viewed by others


Bibliography
Raucent B., G. Bastin, G. Campion and J.-Cl. Samin. Identification of barycentric parameters of robotic manipulators from external measurements. Proceedings of the Eighth IFAC Symposium on Identification and System Parameter Estimation, Beijing, China, 1988.
Bonivert L., P. Maes and J.-Cl. Samin, Simulation of the lateral dynamics of the GLT vehicle by means of ROBOTRAN; a model genarator for robots, Simulation in the Factory of the Future, M. Muller and R. Reddy (eds), SCS publication, Belgium, 1988
Tremblay J.-P. and P.G. Sorenson. An Introduction to Data Structures with Applications. McGraw-Hill, New York, second edition, 1984.
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 1990 Springer-Verlag Berlin Heidelberg
About this chapter
Cite this chapter
Schiehlen, W. (1990). ROBOTRAN. In: Schiehlen, W. (eds) Multibody Systems Handbook. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-50995-7_15
Download citation
DOI: https://doi.org/10.1007/978-3-642-50995-7_15
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-50997-1
Online ISBN: 978-3-642-50995-7
eBook Packages: Springer Book Archive