
Abstract
The satellite missions CHAMP, GRACE and GOCE are substantially contributing for the improvement of the Earth gravity field knowledge. However, the respective satellite gravity information remains still limited to around 80 km of spatial resolution. In this condition, it is necessary to use local surface data in shorter wavelengths to obtain more accurate resolutions. This paper deals with strategies to model the Earth gravity field in medium and high frequencies, based on merging Global Geopotential Models (GGMs) and Digital Elevation Models (DEMs). A test area was established in southern Brazil, between the parallels 22ºS and 27ºS and meridians 48ºW and 55°W. The presented methodology uses GOCE_DIR2, already available in the degree and order of 240; GOCE_TIM2, in the degree and order of 250; GOCO02S, in the degree and order of 250; and the combined model EIGEN-06C, in the degree and order of 1420. In order to generate the proposed model, a Residual Terrain Model (RTM) technique was applied, based on the GMRT v2.0 (Global Multi-Resolution Topography 2.0 version) model data. When applying RTM technique, the proposed model achieved better resolutions than the original contained in GGMs. In the absolute analysis, the RMS in GNSS/leveling stations has been reduced by around 17 %, 18 %, 20 % and 20.5 %, respectively for GOCE_DIR2, GOCE_TIM2, GOCO02S, and EIGEN-06C models. The absolute discrepancies were reduced by around 18 % for the satellite-only models and by 28.6 % for the EIGEN-06C. Considering baselines in the range from 55 to 550 km, the contribution of the RTM for the improvement of the original resolution in ppm was around 38 %, 54 %, 57 % and 6.5 %, respectively for GOCE_DIR2, GOCE_TIM2, GOCO02S, and EIGEN-06C models.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
ESA (1999) predicted new possibilities for modeling the gravity field based on dedicated gravity satellite missions with a higher resolution than by classical orbit analysis techniques (Kaula 1966). The CHAMP (CHAllenging Minisatellite Payload) and GRACE (Gravity Recovery and Climate Experiment) missions provides satellite-only GGMs in spherical harmonics with appropriate resolution for degree and order (n/m) = 100 (CHAMP), and n/m = 180 (GRACE) (ICGEM 2011). Rummel (2000) predicted geoid height accuracy around 1 cm for the resolution of 100 km, which corresponds to n/m = 200 for the GOCE (Gravity field and steady-state Ocean Circulation Explorer) satellite mission. According the variance model proposed by Tscherning and Rapp (see Flury and Rummel 2005) for harmonic development of geopotential, the global RMS predicted for the gravitational signal variation above of n/m = 300 is approximately 28 cm decreasing to 10 cm for n/m = 700. Currently, the satellite-only GGMs coming from GOCE and GRACE have degrees and orders up to n/m = 250. Though, satellite-only GGMs need to be combined with other sources of information to achieve a geoid or quasigeoid with sub-decimeter resolution, in shorter wavelengths. Such information may be obtained from terrestrial, sea or airborne gravimetry, as well as by modeling the gravitational effects from terrain data. However, in general, a resolution of combined models are not globally uniform and depends on locally available information. Another problem is the use of data in different reference systems. Thus when it is necessary to model a regional geoid with a better resolution inside a delimited region, it is important to incorporate a higher density of information in the region, generating the so-called tailored GGMs (Featherstone 2002).
An alternative for modeling regional effects is to combine the long wavelengths provided by GGM with data based on refinements of the disturbing potential, where only sparse gravity data exist. This data can be provided by topography and bathymetry survey. The proposed approach is based on the fusion of GGMs obtained by the GOCE and GRACE missions, combined with the Residual Terrain Model (RTM) technique.
2 The Spectral Decomposition
According to Schwarz (1984) one can divide the full spectrum of Earth’s gravity field in low (l), medium (m), high (h) and very high (v) frequencies, or long, medium, short and very short wavelengths in the form:
Because of the evolution of methods to acquire information about the Earth’s gravity field, it’s possible to divide the spectrum schematically. Within this current view, the gravity satellite missions allowed to extend the degree of resolution of so-called long wavelengths up to about 250 as the models from the GOCE mission (ESA 2011). Also, commission errors were greatly reduced on medium wavelengths due to the use of latest techniques of data merge. The use of these techniques provides the possibility of achieving high degrees of GGMs, with errors of omission below the spatial resolution. This is the Earth Gravitational Model 2008 (EGM2008) case (Pavlis et al. 2008). Because the improving of DTMs in last 10 years, techniques such as the RTM allowed the estimation of gravitational signal features in very short wavelengths (Fig. 1).

Gravity spectrum and data sources. Axes scales were disregarded to provide a clear overview of the proposed division
2.1 Residual Terrain Model (RTM) Technique
There are some consistent approaches for modeling high-frequency signals from Earth’s gravity field. Some of them are the classic Remove–Restore (RR) method in the usual free GBVP, and the Residual Terrain Model (RTM) technique, optimum for the fixed GBVP. The latter was applied successfully for anomalous potential modeling in mountainous regions taking into account the available new DEMs and GGMs (Hirt et al. 2010).
The RTM technique consists in calculating the effects of short wavelengths of the Earth’s gravity field based on a reference topographic “medium” surface whose spectral resolution is associated to that given by the used GGM. This smoothed surface acts as a high-pass filter on the high resolution DEM, removing the long wavelengths related to those involved in the GGM. The topographical masses above the reference surface are removed and masses are filled up below this surface. Details of this reduction scheme can be found in Forsberg and Tscherning (1981). The direct topographical effect on gravity for this reduction method can be expressed as (Forsberg 2009):
where l is the distance to the mass elements, H ref and H represents the reference height surface and the topographic heights, respectively; ρ is the density of topographic masses and z is height, relative to the smoothed surface. The reference surface can be defined as any smooth surface that represents the average elevation of the region, or as a surface model developed in series of spherical harmonics. The RTM gravitational effect corresponds to the residual gravity field linked to wavelengths omitted in the GGM and contained in the high resolution DEM (Forsberg 1984).
The RTM reduction is also approximated by the following formula, when the mean elevation computed is adequate enough to represent the long wavelength surface (Forsberg 2009):
where tc is the terrain correction. The first term in (3) is the difference between two Bouguer plates: the first one computed with the thickness of the height of the computation point; and the second one with the height of the reference surface. This way, the topographical masses above the geoid are removed with the complete Bouguer reduction and then restored with the reference Bouguer plate.
According to Forsberg and Tscherning (1997) the anomalous potential caused by residual masses associated with the residual DEM can be expressed, after some simplifications, as:
where l 0 is the planar distance between the projections of the mass element and the computation point on the same reference surface associated with the used grid. This structure of integral kernel is referred as a linear approximation by Moritz (1968). In the context of spectral decomposition, the disturbing potential could be presented by the following expression:
The RTM solution can be applied to various quantities of the gravity field like e.g.: gravity anomaly; geoid height; height anomaly; deflection of the vertical. Because of the characteristics of the Brazilian Height System (BHS), where the normal-ortometric heights are closer to normal heights, it was chosen to model the height anomaly. The RTM reduction leads to a correction that can be associated with the quasigeoid determination. Applying the Bruns theorem in (5):
where the \( {\zeta_{{\Delta {g_{\mathit{RTM} }}}}} \) term is recuperated by Stoke’s integral and \( {\zeta_{\mathit{RTM} }} \) is expressed in a linear approximation as:
3 Experiments and Methodology
3.1 Test Area
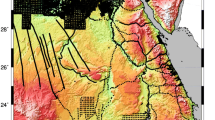
Experiments were performed in the region of Parana State, southern Brazil, between the parallels 22ºS and 27ºS and meridians 48ºW and 55°W where there are GNSS observations on benchmarks for evaluation purposes (Fig. 2).

Test area. Triangles represent benchmark points where ellipsoidal height was determined by GNSS, and circles represent control points to relative analysis
3.2 RTM Calculation of Height Anomaly
The DEM used to obtain RTM solution were: ETOPO1 of 1 arc-minute obtained from the International Centre for Global Earth Models (ICGEM); and the Global Multi-Resolution Topography (GMRT v2.0) obtained from GeoMapApp© version 3.1.6 (http://www.geomapapp.org/). The GMRT is constructed as a multi-resolution gridded digital elevation model that includes seafloor bathymetry to ∼100 m spatial resolution (to ∼50 m in some coastal regions). NOAA coastal grids and numerous grids produced by the international science community are also integrated into the GMRT Synthesis. Multibeam data are merged with lower-resolution compilations including the General Bathymetric Chart of the Oceans (GEBCO 08), the International Bathymetric Chart of the Arctic Ocean (IBCAO), and the SCAR Subglacial Topographic Model of the Antarctic (BEDMAP). Also included are elevation data from NASA’s Advanced Spaceborne Thermal Emission and Reflection Radiometer global DEM (ASTER) which provide 30 m resolution of terrestrial areas throughout the world, and the USGS National Elevation Dataset (NED) providing up to 10 m resolution in some areas of the US. The ETOPO1 and GMRT are referred to the WGS84 system in reference horizontal component, and EGM96 in the vertical component (MGDS 2012; Amante and Eakins 2009).
For this study it was considered the n,m max = 240, n,m max = 250 and n,m max = 1,420 for the ETOPO1 in compatibility with the maximum degree of each used GGM. The RTM effects were calculated by using the FFT (Fast Fourier Transform) considering a constant density value for the topographic masses. There was no available 2D or 3D density digital model in the test area.
Calculations were carried out by the usage of the IAG International Geoid-School Package (TcFour program—GRAVSOFT set). The grids used for the computation were:
-
Detailed Grid or High-resolution grid (DEM1): this is the grid that recovers most of the terrain effect on the magnitude of the gravity field due to the proximity of the computation point, and is considered up to a radius l 0 . In this case, the effective integration radius used was 220 km. The detailed used grid was GMRT because it includes topography and bathymetry;
-
Reference Grid (DEMRef): ETOPO1 which includes topography and bathymetry;
The final solution was obtained from a combination of height anomaly provided by GGM and RTM in the form:
Thus, four models were calculated for different already referred GGMs, allowing the representation of the Earth’s gravitational field in middle and high frequencies. As illustration, the GOCE_TIM2 associated RTM solution for \( \zeta_{\mathit{GGM}}^{{{N_{\mathit{MAX} }}}}(\phi, \lambda ) \), \( \zeta_{\mathit{RTM}}^{{>{N_{\mathit{MAX} }}}}(\phi, \lambda ) \) and \( {\zeta_F}(\phi, \lambda ) \) are shown in Figs. 3, 4, and 5, respectively.

The height anomaly (\( \zeta_{\mathit{GGM}}^{{{N_{\mathit{MAX} }}}}(\phi, \lambda ) \)) from the GGM in nmax = mmax = 250

The height anomaly by residual terrain effect \( \zeta_{\mathit{RTM}}^{250 }(\phi, \lambda ) \)

The height anomaly by final solution (\( {\zeta_F}(\phi, \lambda ) \))
4 Results and Analysis
The four resulting models were evaluated in an absolute way on 90 test points associated with benchmarks. This allowed the comparison between the height anomaly (ζ) obtained from the ellipsoidal height (h) observed with GNSS and the normal-orthometric height (H NO) from leveling, and height anomaly (ζ GGM ) acquired from the GGM solution on each point of evaluation.
The GGM error in the absolute analysis is:
where
The GGM with the RTM contribution error in the absolute analysis is:
The results are shown in Tables 1, 2, 3, and 4. A residual term (ε) was modeled by polynomials of second order as:
Due to data redundancy, a least squares adjustment by through the model Gauss–Markov was applied. The vector of parameters is given by:
The statistics related to the absolute analysis are presented in Tables 1, 2, 3, and 4. The height anomalies obtained from GGMs present a mean discrepancy of −0.37 m related to observed values in the evaluation points associated with GNSS/leveling stations. The mean discrepancy is reduced to about −0.30 m after RTM solutions. The comparison shows reductions in the ranges of discrepancies for GGMs satellite-only. Also, the RMS values’ comparison shows better results with RTM solutions. There are little improvements in the adjusted RMS with one exception related to the EIGEN-06C GGM (Table 4). This GGM has already a consistent resolution due the used gravity and the terrain data in its development. Even considering a little improvement obtained by the RTM technique related to the EIGEN-06C, the adjustment may be introducing some noises coming from GNSS/leveling errors.

Control points and distribution network

Relative analysis of the εGGM and εGGM+RTM with GOCE_TIM2 (nmax = mmax = 250)
An appropriate way to evaluate the real potential of GGM to substitute the geometric leveling is to test it against data from GNSS/leveling in a relative case, according the equation:
The relative analysis was based on (14) by using 11 GNSS/leveling points. Among these points it was possible to establish several baselines ranging from about 50–600 km. Figure 6 shows their distribution and the results are summarized in Figs. 7, 8, 9, and 10.

Relative analysis of the εGGM and εGGM+RTM with GOCO02S GGM (nmax = mmax = 250)

Relative analysis of the εGGM and εGGM+RTM with GOCE_DIR2 (nmax = mmax = 240)

Relative analysis of the εGGM and εGGM+RTM with EIGEN-06C (nmax = mmax = 1,420)
Considering baselines in the range from 55 to 550 km, related with the degrees and orders 360 and 36, respectively, the contribution of the RTM for improving the original resolution GGMs was by around 54 %, 57 %, 38 % and 6.5 %, respectively for the models GOCE_TIM2, GOCO02S, GOCE_DIR2 and EIGEN-06C. In Figs. 7, 8, 9, and 10, it is possible to demonstrate the enhancements provided by different wavelengths. The RTM improvements related to observed discrepancies are more significant for satellite-only models for wavelengths in the interval from 100 to 200 km. The EIGEN-06C shows only slightly development on its relative resolution, as already seen in the absolute case’ tests.
5 Possible Applications for BHS
The BHS network was built in the last 60 years, based on spirit leveling along with about 180,000 km of leveling lines, and involving more than 65,000 benchmarks. However, BHS does not fulfill the standards and requirements for a modern height system. The BHS is a normal-orthometric system due to the lack of gravity observations along with the leveling lines. Only corrections derived from the normal gravity field were applied in its realization. Even considering the dimensions of the BHS network, it must be still expanded for a large portion of the country where there are no height control benchmarks and is almost impossible to develop spirit leveling. Also, there is no effective control of the deformations in the network. There are difficulties for applying the existing Brazilian Geodetic Tide Gauge Network to control deformations due to complexity in modeling reference levels along with the coast. Another existing issue is that there are two official Vertical Datums in BHS. This occurs because of the division of the network in two parts, by the wide Amazon River in a large portion of Northern Brazil.
The GGMs obtained from the satellite gravity missions were certainly improved by RTM in the proposed approach and it surely contributes for solving most of referred problems. By using the presented method, a reference surface linked to a WHS can be obtained. This surface could be used as basis for linking datums, to model deformations by linking control tide gauges, and for improving leveling surveys in remote regions based in GNSS techniques and disturbing potential modeling (Ferreira and de Freitas 2011).
6 Summary
In this paper we explored the possibilities for improving the spatial resolution for GGMs in medium and short wavelengths. An approach based on the RTM technique for completing up the medium and high frequencies not comprised in GGMs was tested. The achieved results show improvements in the absolute and relative analysis in a test area, mainly for satellite-only models.
In the absolute analysis related to GNSS/leveling points reductions of about 9 cm in RMS and on 7 cm discrepancies of height anomalies were observed in used GGMs. Only in the case of combined GGM, the adjusted RMS after applying RTM technique was slightly worse than the case of pure GGM solution. In the relative analysis all models were improved by RTM technique. The satellite-only models presented enhancement of about 50 %. The combined model presented only 6.5 % of progress, for the relative analysis.
The approach for obtaining a better resolution from GGMs based in RTM technique is promising, specially to be used in association with the Brazilian Height System. This happens due to the low commission errors caused by reference systems contained in the satellite-only GGMs. The used GGMs satellite-only from GRACE and GOCE missions in association with modern DTM could contribute for BHS, a system in need of modernization.
References
Amante C, Eakins BW (2009) ETOPO1 1 arc-minute global relief model: procedures, data sources and analysis. NOAA technical memorandum NESDIS NGDC-24, p 19
ESA European Space Agency (1999) Gravity field and steady-state ocean circulation mission. ESA SP-1233(1), Report for mission selection of the four candidate Earth explorer missions. http://esamultimedia.esa.int/docs/goce_sp1233_1.pdf
ESA European Space Agency (2011) http://www.esa.int/esaCP/index.html
Featherstone WE (2002) Expected contributions of dedicated satellite gravity field missions to regional geoid determination with some examples from Australia. J Geospat Eng 4:2–19
Ferreira VG, de Freitas SRC (2011) Geopotential numbers from GPS satellite surveying and disturbing potential model: a case study for Parana, Brazil. J Appl Geod 5:155–162
Flury J, Rummel R (2005) Future satellite gravimetry for geodesy. Institut für Astronomische und Physikalische Geodäsie, TU. Earth Moon Planets 94:13–29
Forsberg R, Tscherning CC (1981) The use of height data in gravity field approximation by collocation. J Geophys Res 86:7843–7854
Forsberg R (1984) A study of terrain reductions, density anomalies and geophysical inversion methods in gravity field modelling. Report No. 355. Department of Geodetic Science and Surveying, The Ohio State University, Columbus
Forsberg R, Tscherning CC (1997) Topographic effects in gravity field modelling for BVP. In: Sansò F, Rummel R (eds) Geodetic boundary value problems in view of the one centimeter geoid. Lecture notes in Earth sciences, vol 65. Springer, Berlin, pp 241–272
Forsberg R (2009) International Geoid School. Lecture notes and personal communication, Buenos Aires, Argentina September 2009
Hirt C, Featherstone WE, Marti U (2010) Combining EGM2008 and SRTM/DTM2006.0 residual terrain model data to improve quasigeoid computations in mountainous areas devoid of gravity data. J Geod 84:557–567
ICGEM (2011) International Center for Global Earth Models. http://www.icgem.gfz-potsdam.de/icgem/icgem.html
Kaula W (1966) Tests and combinations of satellite determinations of the gravity field with gravimetry. J Geophys Res 71:5303–5314
MGDS (2012) Marine geoscience data system—global multi-resolution topography data portal. http://www.marine-geo.org/portals/gmrt/
Moritz H (1968) On the use of terrain correction in solving Molodensky’s problem. Scientific Report, p 46
Pavlis NK, Holmes SA, Kenyon SC, Factor JK (2008) An Earth gravitational model to degree 2160: EGM2008. Presented at the 2008 general assembly of the European geoscience union, Vienna, April 2008, pp 13–18
Rummel R (2000) Global integrated geodetic and geodynamic observing system (GIGGOS). In: Rummel R, Drewes H, Bosch W, Hornik H (eds) Towards an integrated global geodetic observing system (IGGOS), IAG symposia, vol 120. Springer, Berlin, pp 253–260
Schwarz KP (1984) Data types and their spectral properties. In: Schwarz KP (ed) Local gravity field approximation. International Summer School (BSS), Beijing, pp 1–66
Acknowledgements
The authors would like to thank the IUGG2011/IAG by the student grant for K. P. Jamur, who was also supported by CNPq in her PhD program. Also thanks to CNPq by financial support of research, Process 301797/2008-0 and 141663/2010-3. Also thanks to Prof. N. C. de Sá by providing the GNSS/leveling database.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2014 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Jamur, K.P., de Freitas, S.R.C., Montecino, H.D. (2014). Study of Alternatives for Combining Satellite and Terrestrial Gravity Data in Regions with Poor Gravity Information. In: Rizos, C., Willis, P. (eds) Earth on the Edge: Science for a Sustainable Planet. International Association of Geodesy Symposia, vol 139. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-37222-3_74
Download citation
DOI: https://doi.org/10.1007/978-3-642-37222-3_74
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-37221-6
Online ISBN: 978-3-642-37222-3
eBook Packages: Earth and Environmental ScienceEarth and Environmental Science (R0)