
Abstract
The present research is dedicated to the stability analysis of nonlinearly elastic highly porous plates. The mechanical properties and behavior of these plates are described using the model of an inhomogeneous micropolar (Cosserat) medium. Such approach allows for a more precise modeling and detailed analysis of the buckling process for constructional elements made of highly porous materials. In the framework of a general stability theory for three-dimensional bodies, we have studied the stability of a circular micropolar plate subject to radial compression. It is assumed that elastic properties of the plate vary through the thickness. Using the linearization method in a vicinity of a basic state, the neutral equilibrium equations are derived, which describe the perturbed state of a plate. For a special case of axisymmetric buckling modes this linearized equilibrium equations are reduced to the system of three ordinary differential equations. It is also shown that if elastic properties of a plate are symmetric through the thickness then the stability analysis is reduced to solving two independent linear homogeneous boundary-value problems for the half-plate.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
- Couple Stress
- Radial Compression
- Linearize Boundary Condition
- Axisymmetric Perturbation
- Inhomogeneous Plate
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
With the increasing number of new structural materials, the problem of stability analysis for bodies with a microstructure becomes important. One example of such materials is a porous material. Engineering structures made of porous materials, especially metal and polymer foams, have different applications in the last decades [2–4, 6, 9]. The foams are cellular structures consisting of a solid metal (for example aluminium, steel, copper, etc.), or polymer (polyurethane, polyisocyanurate, polystyrene, etc.) and containing a large volume fraction of gas-filled pores. There are two types of foams. One is the closed-cell foam, while the second one is the open-cell foam. The defining characteristic of metal and polymer foams are the very high porosity: typically, well over 80 %, 90 % and even 98 % of the volume consists of void spaces.
Constructions made of porous materials are widely used in modern industries with airspace or automotive applications among others. The reason for this is the advantages of such materials: better density-stiffness ratios in comparison with classical structural materials, the possibility to absorb energy, etc. As a rule, these constructions have a functionally graded structure. For example, the porous core is quite often covered by hard and stiff shell, which can be necessary for corrosion or thermal protection, and optimization of mechanical properties in the process of loading.
2 Initial Strain State of Inhomogeneous Plate
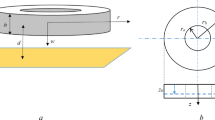
We consider the circular plate of radius \(r_1\) and thickness \(H\), and made of functionally graded material. The behavior of the plate is described by the model of micropolar elastic body [1, 5, 8, 10, 13, 19]. For the radial compression (extension) of the plate, the position of a particle in the strained state is given by the radius vector \({\varvec{R}}\) [12, 20]:
Here \(r,\,\varphi ,\,z\) are cylindrical coordinates in the reference configuration (Lagrangian coordinates), \(R,\,\Phi ,\,Z\) are Eulerian cylindrical coordinates, \(\left\{ {{\varvec{e}}_r,\,{\varvec{e}}_\varphi ,\, {\varvec{e}}_z } \right\} \) and \(\left\{ {{\varvec{e}}_R,\, {\varvec{}}{\varvec{e}}_\Phi ,\, {\varvec{e}}_Z } \right\} \) are orthonormal vector bases of Lagrangian and Eulerian coordinates, respectively, \(\alpha \) is the radial compression ratio, \(f(z)\) is some unknown function, which describe the strain in the thickness direction of the inhomogeneous plate.
In addition, a proper orthogonal tensor of microrotation \({\mathbf{\mathsf{{H}} }}\) is given, which characterizes the rotation of the micropolar medium particle and for the considered strain has the form
According to expressions (1) and (2), the deformation gradient \({\mathbf{\mathsf{{C}} }}\) is (hereinafter \(^\prime \) denotes the derivative with respect to \(z\)):
where \(\mathrm{grad}\) is the gradient in Lagrangian coordinates. It follows from relations (3) and (4) that the wryness tensor \({\mathbf{\mathsf{{L}} }}\) is equal to zero [14, 15]
and the stretch tensor \({\mathbf{\mathsf{{Y}} }}\) is expressed as follows
We assume that the elastic properties of the plate vary through the thickness, and they are described by the model of physically linear micropolar material, whose specific strain energy is a quadratic form of the tensors \({\mathbf{\mathsf{{Y}} }}-{\mathbf{\mathsf{{E}} }}\) and \({\mathbf{\mathsf{{L}} }}\) [7, 11]:
Here \(\lambda (z)\), \(\mu (z) \) are functions describing the change in the Lamé parameters, \(\kappa (z)\), \(\gamma _1(z)\), \(\gamma _2(z)\), \(\gamma _3(z) \) are micropolar elastic parameters changing with the thickness coordinate, \({\mathbf{\mathsf{{E}} }}\) is the unit tensor.
It follows from expressions (3), (5) and (6) that the Piola-type couple stress tensor \({\mathbf{\mathsf{{G}} }}\) is equal to zero for the deformation of radial compression (1)–(3) of the circular plate
and Piola-type stress tensor \({\mathbf{\mathsf{{D}} }}\) is
The equilibrium equations of nonlinear micropolar elasticity in absence of mass forces and moments are written as follows [7, 20]
where \(\mathrm{div}\) is the divergence in the Lagrangian coordinates. The symbol \(_\times \) represents the vector invariant of a second-order tensor:
We assume that there are no external loads on the faces of the plate \((z=\pm H/2)\), and there is no vertical displacement on the middle surface \(z=0\):
By solving the boundary problem (8), (9) while taking into account the relations (7) we found the unknown function \(f\left( z \right) \):
In the special case, when the pattern of variation for elastic parameters \(\lambda ,\,\mu ,\,\kappa \) is the same
the expression for the function \(f(z)\) is quite simple:
3 Equilibrium Bifurcation for Inhomogeneous Plate
We assume that in addition to the above-described state of equilibrium for the inhomogeneous plate, there is an infinitely close equilibrium state under the same external loads, which is determined by the radius vector \({\varvec{R}}+\eta {\varvec{v}}\) and microrotation tensor \({\mathbf{\mathsf{{H}} }}-\eta {\mathbf{\mathsf{{H}} }}\times {\varvec{\upomega }}\). Here \(\eta \) is a small parameter, \({\varvec{v}}\) is the vector of additional displacements, \({\varvec{\upomega }}\) is a linear incremental rotation vector, which characterizes the small rotation of the micropolar medium particles, measured from the initial strain state.
The perturbed state of equilibrium for the micropolar medium is described by the equations [7]:
where \({\mathbf{\mathsf{{D}} }}^\bullet \) and \({\mathbf{\mathsf{{G}} }}^\bullet \) are the linearized Piola-type stress and couple stress tensors. In the case of physically linear micropolar material (6), the following relations are valid for these tensors [17, 18]:
Here \({\mathbf{\mathsf{{Y}} }}^\bullet \) is the linearized stretch tensor, \({\mathbf{\mathsf{{L}} }}^\bullet \) is the linearized wryness tensor. Linearized boundary conditions on the faces of the plate \(\left( z=\pm H/2 \right) \) are written as follows:
We assume that there is no friction at the edge of the plate \(\left( r=r_1 \right) \), and constant normal displacement is given. This leads to the following linearized boundary conditions:
We write the vector of additional displacements \({\varvec{v}}\) and vector of incremental rotation \({\varvec{\upomega }}\) in the basis of Eulerian cylindrical coordinates:
With respect to representation (15), the expressions for the linearized stretch tensor \({\mathbf{\mathsf{{Y}} }}^\bullet \) and wryness tensor \({\mathbf{\mathsf{{L}} }}^\bullet \) have the form:
According to relations (3)–(5), (11), (12), (15)–(17), the components of the linearized Piola-type stress tensor \({\mathbf{\mathsf{{D}} }}^\bullet \) and couple stress tensor \({\mathbf{\mathsf{{G}} }}^\bullet \) are written as follows:
Using expressions (4), (5), (7) and (15), (18), we write the equations of the neutral equilibrium (10) for the inhomogeneous plate in scalar form:
Substitution
allows us to separate the variable \(\varphi \) in these equations, reducing the stability analysis to the solution of homogeneous boundary problem (13), (14) and (19) for a system of six partial differential equations in the six unknown functions of two variables \(r,\ z\).
4 Axisymmetric Buckling Modes
In the special case of axisymmetric perturbations \((n=0)\) the use of substitution
leads to the separation of variable \(r\) in the equations of neutral equilibrium and allows to satisfy the linearized boundary conditions (14) at the edge of the plate.
By taking into account the relations (20), the linearized equilibrium equations (19) are written as follows:
Here we use the following notation
The linearized boundary conditions on the faces of the plate (13) take the form:
Thus, in the case of axisymmetric perturbations, the stability analysis of the inhomogeneous circular plate is reduced to solving a linear homogeneous boundary-value problem (21) and (22) for a system of three ordinary differential equations.
5 Symmetric Plate
It is easy to show that if the functions describing the change in the elastic parameters of the plate through the thickness are even, i.e. \(\lambda (z)=\lambda (-z)\), \(\mu (z)~=~\mu (-z)\), \({\kappa (z)=\kappa (-z)}\), \(\gamma _1(z)=\gamma _1(-z)\), \(\gamma _2(z)=\gamma _2(-z)\), \(\gamma _3(z)=\gamma _3(-z)\), then the boundary-value problem (21), (22) has two independent sets of solutions [16, 18].
The First set is formed by solutions for which the deflection of a plate is an odd function of \(z\) (symmetric buckling):
For the Second set of solutions, on the contrary, the deflection is an even function of \(z\) (bending buckling):
Due to this property of boundary-value problem (21) and (22), for the study of stability it is sufficient to consider only the upper half of the inhomogeneous plate \((0\leqslant z \leqslant H/2)\). The boundary conditions at \(z=0\) follows from the evenness and oddness of the unknown functions \(V_R, \ V_Z,\ \Omega _\Phi \):
-
(a)
for the First set of solutions:
$$\begin{aligned} {V}^{\prime }_R (0)=V_Z (0)=\Omega _\Phi (0)=0, \end{aligned}$$(23) -
(b)
for the Second set of solutions:
$$\begin{aligned} {V}_R (0)=V^{\prime }_Z (0)=\Omega ^{\prime }_\Phi (0)=0. \end{aligned}$$(24)
Thus, in the case of symmetric inhomogeneous plate, the stability analysis is reduced to solving two linear homogeneous boundary-value problems—(21), (22), (23) and (21), (22), (24)—for a system of three ordinary differential equations.
6 Conclusion
In the framework of bifurcation approach, the stability of an inhomogeneous circular plate subjected to radial compression and composed of a micropolar material is studied. For the physically linear micropolar material, a system of linearized equilibrium equations (19) is derived, which describes the behavior of the inhomogeneous plate in a perturbed state. Using special substitution (20) this equations are simplified and the linearized boundary-value problem is formulated for the case of an axisymmetric perturbations. Namely, the stability analysis is reduced to solving a linear homogeneous boundary problem (21) and (22) for a system of three ordinary differential equations.
It was also shown that, if the inhomogeneous plate is symmetric with respect to the middle surface \(z=0\), then the stability analysis is reduced to solving two independent linear homogeneous boundary-value problems for the half-plate—(21), (22), (23) and (21), (22), (24).
For specific micropolar materials all formulated boundary-value problems can be solved numerically using the same method as in [17] and [18].
References
Altenbach, J., Altenbach, H., Eremeyev, V.A.: On generalized Cosserat-type theories of plates and shells: a short review and bibliography. Arch. Appl. Mech. 80, 73–92 (2010)
Ashby, M.F., Evans, A.G., Fleck, N.A., Gibson, L.J., Hutchinson, J.W., Wadley, H.N.G.: Metal Foams: A Design Guide. Butterworth-Heinemann, Boston (2000)
Banhart, J.: Manufacturing routes for metallic foams. J. Miner. 52(12), 22–27 (2000)
Banhart, M.F.A.J., Fleck, N.A. (eds.): Metal Foams and Porous Metal Structures. MIT Publishing, Bremen (1999)
Cosserat, E., Cosserat, F.: Théorie des Corps Déformables. Hermann et Fils, Paris (1909)
Degischer, H.P., Kriszt, B. (eds.): Handbook of Cellular Metals. Production, Processing, Applications. Wiley, Weinheim (2002)
Eremeyev, V.A., Zubov, L.M.: On stability of elastic bodies with couple-stresses. Mech. Solids 29(3), 172–181 (1994)
Eringen, A.C.: Microcontinuum Field Theory. I. Foundations and Solids, Springer, New York (1999)
Gibson, L.J., Ashby, M.F.: Cellular Solids: Structure and Properties. 2nd edn. Cambridge Solid State Science Series, Cambridge University Press, Cambridge (1997)
Kafadar, C.B., Eringen, A.C.: Micropolar media - I. The classical theory. Int. J. Eng. Sci. 9, 271–305 (1971)
Lakes, R.: Experimental methods for study of Cosserat elastic solids and other generalized elastic continua. In: Muhlhaus, H., Wiley, J. (eds.) Continuum Models for Materials with Micro-Structure, pp. 1–22. New York (1995)
Lurie, A.I.: Non-linear Theory of Elasticity. North-Holland, Amsterdam (1990)
Maugin, G.A.: On the structure of the theory of polar elasticity. Philos. Trans. Roy. Soc. London A 356, 1367–1395 (1998)
Nikitin, E., Zubov, L.M.: Conservation laws and conjugate solutions in the elasticity of simple materials and materials with couple stress. J. Elast. 51, 1–22 (1998)
Pietraszkiewicz, W., Eremeyev, V.A.: On natural strain measures of the non-linear micropolar continuum. Int. J. Solids Struct. 46, 774–787 (2009)
Sheydakov, D.N.: Stability of a rectangular plate under biaxial tension. J. Appl. Mech. Tech. Phys. 48(4), 547–555 (2007)
Sheydakov, D.N.: Buckling of elastic composite rod of micropolar material subject to combined loads. In: Altenbach, H., Erofeev, V.I., Maugin, G.A. (eds.) Mechanics of Generalized Continua—From Micromechanical Basics to Engineering Applications, Advanced Structured Materials, vol. 7, pp. 255–271. Springer, Berlin (2011a)
Sheydakov, D.N.: On stability of elastic rectangular sandwich plate subject to biaxial compression. In: Altenbach, H., Eremeyev, V.A. (eds.) Shell-like Structures—Non-classical Theories and Applications, Advanced Structured Materials, vol. 15, pp. 203–216, Springer, Berlin (2011b)
Toupin, R.A.: Theories of elasticity with couple-stress. Arch. Ration. Mechan. Anal. 17, 85–112 (1964)
Zubov, L.M.: Nonlinear Theory of Dislocations and Disclinations in Elastic Bodies. Springer, Berlin (1997)
Acknowledgments
This work was supported by the Russian Foundation for Basic Research (grant 12-01-91262-RFG-z and 11-08-01152-a) and German Academic Exchange Service (DAAD) (program “Forschungsaufenthalte für Hochschullehrer und Wissenschaftler”).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2013 Springer-Verlag Berlin Heidelberg
About this chapter
Cite this chapter
Sheydakov, D.N. (2013). Buckling of Inhomogeneous Circular Plate of Micropolar Material. In: Altenbach, H., Forest, S., Krivtsov, A. (eds) Generalized Continua as Models for Materials. Advanced Structured Materials, vol 22. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-36394-8_17
Download citation
DOI: https://doi.org/10.1007/978-3-642-36394-8_17
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-36393-1
Online ISBN: 978-3-642-36394-8
eBook Packages: Chemistry and Materials ScienceChemistry and Material Science (R0)