
Abstract
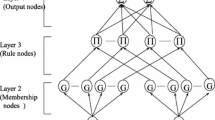
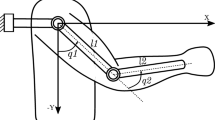
In conventional impedance control, the difficulties encountered in obtaining an exact system dynamic model and selecting its impedance parameters have prevented it from being applied to many real world applications. The integration of Fuzzy Logic Control (FLC) and Neural Networks (NNs) into impedance control can not only simplify the design procedure but also improve the controller’s performance. In this paper a fuzzy-neural impedance controller is introduced to control a robot to follow complex spatial edges. To design such a fuzzy-neural controller, firstly, an FLC is designed by trial and error based on the human knowledge of the impedance control. This FLC is then used to train an NN. After the training, the NN, called the fuzzy-neural controller in this paper, can be used to control the robot. By using this method the fuzzy-neural impedance controller can handle the system inexactness and uncertainties effectively. Furthermore, the designing process of this controller is simple. The performance of this fuzzy-neural impedance controller is compared with that of other types of impedance control methods. Simulation results are used to show the effectiveness of such a fuzzy-neural based impedance control.
Preview
Unable to display preview. Download preview PDF.
Similar content being viewed by others

Author information
Authors and Affiliations
Editor information
Rights and permissions
About this paper
Cite this paper
Xu, ZL., Fang, G. Fuzzy-Neural Impedance Control for Robots. In: Tarn, TJ., Zhou, C., Chen, SB. (eds) Robotic Welding, Intelligence and Automation. Lecture Notes in Control and Information Science, vol 299. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-540-44415-2_16
Download citation
DOI: https://doi.org/10.1007/978-3-540-44415-2_16
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-540-20804-4
Online ISBN: 978-3-540-44415-2
eBook Packages: Springer Book Archive