
Abstract
The model of interaction between the wheel of a locomotive and a rail based on taking into account the discrete structure of solid deformable bodies using the fundamental concept of metal lattice dislocations was developed. Under the action of applied normal and tangential forces, these dislocations can move and exit to the surface of the crystal or part, if, for example, the Mises yield criterion is fulfilled, which can be considered as a condition for the emergence of dislocations on the surface. The creep force is treated as the total force of destruction of the grippers between the groups of atoms of the wheel and the rail, and simultaneously, the occurring process of sliding the wheel along the rail—as a process of “collapse” of dislocations emerging on the contact surface, i.e., as a translational plastic flow (shear without deformation). It was shown that the creep force depends on the normal and tangential pressures of the wheel on the rail, as well as on a number of additional factors, such as an increase in the number of dislocations with an increase in the deformation rate of the contact zone and the coefficient of destruction of the oxide film. The satisfactory convergence of the results of calculations of lateral fluctuations of the locomotive obtained with the use of the proposed model and known experimental data is shown.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
- Wheel–rail interaction
- Lateral fluctuations
- Intermetalloid compound
- Creep
- Creep force
- Dislocation “collapse”
1 Introduction
The most common models of wheel–rail interaction are models constructed on the basis of the laws of elastic interaction [1, 2], in which the force of interaction is called the force creep force. In [3,4,5,6,7], the problem of rolling deformable bodies is solved using more complex models that take into account the elastic and inelastic bonds. However, this does not explain the reasons for the occurrence of high creeps that reach 10–15 km/h for locomotives when the limiting values of tractive force are realized. Therefore, to solve the problem, the development of other models not used previously, which are based on the theoretical positions of the physics of a deformable solid, is relevant [8]. The model proposed in this article is based on the discrete structure of solid deformable bodies with the use of the fundamental concept of dislocations of the crystal lattice of metals [9,10,11] and allows to describe the processes of interaction between a wheel and a rail. According to this theory, dislocations are a special type of imperfection of the crystal lattice; they arise in the process of manufacturing parts and are an integral part of the crystal lattice of metals.
2 The Dislocation Model of the Wheel–Rail Interaction
When dislocations appear, the crystal lattice of the metal breaks, and this is equal to twice lattice distance \(2{\Delta} r\) (\(\Delta r \approx 2.2 \times 10^{ - 14} \;\text{m}\) [9]). If, under the action of applied loads, a complex stress state appears in the workpiece with the presence of tangential stresses \(\tau\), then when the total stresses in some of its zones begin to satisfy the condition of the beginning of fluidity, for example, Mises [12, 13] (in the plane stress state)
dislocations will start to come out on the surface of the crystal or part.
The exit of a dislocation to the surface is accompanied by the release of energy into the external medium, which according to [9] is 8 eV. At the same time, the activation energy of the exchange process when the surface quasi-free atoms of the contacting bodies are combined is less than 1 eV. This means that when dislocations leave the surface, conditions are created for the spontaneous establishment of the physical interaction between the atoms of the wheel and the rail, and it is an intermetalloid compound (capture) in which a group of atoms participates.
Areas of capture are called active centers or spots of capture. In this case, under the influence of normal and tangential forces, the crystalline structures of two bodies will unite into one, and it is called cold welding. These phenomena cause two concurrent processes: the adhesion of the wheel and rail and the creep of the wheel along the rail.
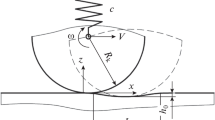
Let us consider the principles of constructing models of such simultaneously occurring processes of adhesion and creep of the wheel and rail using the basic provisions of dislocation theory. In the first approximation, we will assume that in the interaction of a wheel and a rail, the movement of dislocations occurs under the action of a equivalent force \(F_{\text{eq}}\), calculated by analogy with Eq. (1) under the assumption that the stresses at all points of the contact plane are equal
In this equation, \(F_{{\tau {\text{eq}}}}\)—equivalent tangential force, which consists of the sum of the greatest tangent force \(F_{\tau 1}\) (arising in the contact zone from the action of the vertical wheel pressure on the rail \(P\)), gravitational forces caused by the taper of the tire [14], and the proportion of the external tangential traction force \(F_{\tau 2}\) applied in the contact zone from the rail to the locomotive wheel.
We will assume that the tangential force \(F_{\tau 1}\) is added by two terms. The first is determined by the results of solving the contact problem of the theory of elasticity [15]. According to the theory when \(P\) force is in the action, the maximum of the tangential stresses is located at a depth which is the smaller semiaxis of the contact ellipse. In accordance with the theory of Hertz elastic contact in Table 4.1 [15] shows the values of \(\tau_{ \hbox{max} }\) at this point, varying within \(0.300P < \tau_{ \hbox{max} } < 0.325P\). In the first approximation, we assume that \(\tau_{ \hbox{max} } = 0.312P\) is created by an equivalent tangential force \(F_{\tau 1}\) that makes up the same fraction of the normal force \(P\), i.e., \(F_{\tau 1} = \varsigma_{\tau } P\), where \(\varsigma_{\tau } = 0.312\).
The second term in \(F_{\tau 1}\) is an external force in the mode of movement of the locomotive on the coasting retardation. It is due to lateral fluctuations caused by the taper of the tire, and is determined by the gravitational forces \(F_{x}^{l,\,r}\) and \(F_{y}^{l,\,r}\) [14] formed at the points of contact between the left and right wheels under the action of the force \(P\)
In the traction mode of motion, the projections on the coordinate axes of the traction force \(F_{\text{tr}} \left( {v_{\Sigma } } \right)\) applied to the wheel are added to the forces (3) and (4)
In this equation, \(\varsigma_{\text{tr}} \left( {v_{\Sigma } } \right)\)—dimensionless traction coefficient; \(v_{\Sigma }\)—the total velocity of movement of the contact point of the wheel relative to the rail \(v_{\Sigma } = \omega r_{t}\), which consists of the velocities of the movement of the locomotive (the center of the wheel) \(v\) and creep of contact point along the rail \(v_{\text{cr}}\): \(v_{\Sigma } = v + v_{\text{cr}}\).
Thus, for the traction mode with the greatest interaction of wheels and rails, (2) takes the form
We will assume that it is these tangential forces \(F_{ \hbox{max} }^{l,\,r} \left( {F_{{{ \hbox{max} }\,x}}^{l,\,r} ;\;F_{{{ \hbox{max} }\,y}}^{l,\,r} } \right)\) (see 5 and 6) that are the equivalent forces that cause dislocation motion in the interaction of a wheel and a rail.
Let us assume, as it is in [16] that the force of interaction between the wheel and the rail \(F_{\text{wr}}\) is the total breaking force of the grippers in the contact zone, i.e., the zones in which the physical interaction between the groups of wheel and rail atoms was established. Within the framework of this assumption, the forces of interaction between the wheel and the rail \(F_{x,y}^{l,\,r}\) [16]
In this equation, \(\mu_{a}\)—coefficient that takes into account the increase in the number of dislocations with increasing strain rate of the contact zone; \({\Lambda}= 1.15 {\Lambda}_{0} \left( \varepsilon \right)\)—coefficient of destruction of the surface oxide film; \(S_{0}\)—the contact area of the wheel and rail, determined from the solution of the Hertz contact problem; \(\varepsilon\)—relative creep velocity of the wheel along the rail \(\varepsilon = v_{\text{cr}} /v_{\Sigma }\).
Let us assume that the creep of the wheel along the rail is due to the destruction of the intermetalloid compounds in the contact zone. We will interpret it as a process of “collapse of dislocations” that have emerged on the contact surface—a translational (portable) plastic flow (a shift without deformation). Such assumptions make it possible to determine the relative creep velocity of the wheel along the rail \(\varepsilon\)
In this equation, \(a\)—large (lateral) axis of the contact ellipse.
We will assume that the forces \(F_{x,y}^{l,\,r}\) determined by (7) are the coefficients of the longitudinal \(k_{x}^{l,\,r}\) and lateral \(k_{y}^{l,\,r}\) creep of the left and right wheels. In this case, the lateral and longitudinal creep forces can be calculated from well-known expressions
In these equations, \(\varepsilon_{y}^{l,\,r} = \frac{{v_{{{\text{cr}}\,y}}^{l,\,r} }}{{v + v_{{{\text{cr}}\,y}}^{l,\,r} }}\), \(\varepsilon_{x}^{l,\,r} = \frac{{v_{{{\text{cr}}\,x}}^{l,\,r} }}{{v + v_{{{\text{cr}}\,x}}^{l,\,r} }}\)—relative lateral and longitudinal creep velocities of the left and right wheels, appearing due to the twisting motion of the wheelset and is determined by well-known formulas.
3 Results
On the basis of (9) for the creep forces, calculations of the free lateral fluctuations of the elements of the VL10u electric locomotive as a nonlinear system at velocities of 40, 60, 90, 175, and 190 km/h were performed. As initial conditions, the lateral deviation of the first in the course of motion of the wheelset was set \(y_{0} = 0.007\;{\text{m}}\). Figure 1a–c shows the results of calculating the free lateral fluctuations of the first wheelset in the course of motion \(y_{\text{ws}} \left( t \right)\) at velocities of 60, 175, and 190 km/h as well as their amplitude spectra \(A_{{y{\text{ws}}}} \left( f \right)\).

Realizations of lateral fluctuations processes of the first wheelset and their amplitude spectra at the velocities of 60 (a), 175 (b), and 190 km/h (c)
It can be seen that the free lateral fluctuations of the wheelset at a velocity of 60 km/h are of a decaying nature with a frequency of 0.7 Hz. At a velocity of 175 km/h, the fluctuations occur at a frequency of 2.53 Hz and practically do not decay, and at a velocity of 190 km/h, the motion becomes unstable, self-fluctuations with an amplitude of ≈8.5 mm occur. The critical velocity by the condition of stability of motion is \(v_{\text{c}} = 176\;{\text{km}}/{\text{h}}\), and the design velocity \(v_{\text{d}} \le v_{\text{c}} /\sqrt 3 \approx 102\;{\text{km}}/{\text{h}}\), which corresponds to the technical characteristics of the VL10u locomotive being studied. Thus, based on the results of the study of free fluctuations, it can be concluded that the description of the interaction forces of wheels and rails can be performed on the basis of a dislocation model of the wheel–rail interaction.
References
Carter FW (1926) On the action of locomotive driving wheel. Proc R Soc 112:151–157
Kalker JJ (1967) On the rolling contact of two elastic bodies in the presence of dry friction. Ph.D. thesis, Delft University Publications
Goldshteyn RV, Zazovsky AF, Spektor AA, Fedorenko RP (1982) Variational methods solving of Herzian three-dimensional problems of rolling with slip and adhesion. Uspekhy Matemat 5(3/4):61–102 (in Russian)
Golubenko AL (1999) A wheel and a rail adhesion, 2nd edn (updated). VUGU Publ., Lugansk (in Russian)
Goryacheva IG (2001) Frictional interaction mechanics. Nauka Publishers, Moscow (in Russian)
Kogan AY (1997) Dynamics of railroads and its interaction with a railway vehicle. Transport Publ., Moscow (in Russian)
Kogan AY (2008) Wheel and rail interaction in the process of rolling. Frict Lubr Engines Mech 8:26–38 (in Russian)
Robotnov YN (1988) Deformable solid body mechanics. Nauka Publ., Moscow, 712 p (in Russian)
Kittel Ch (1956) Introduction to solid-state physics, 2nd edn. Wiley, New York. Chapman & Hall Publ., Ltd., London, 617 p
Averbach BL, Warren BE (1949) The effect of cold work in metals on powder pattern intensities. Appl Phys 20:1066–1069
Frank FC, Read WN (1950) Multiplication processes for slow moving dislocations. Phys Rev 79:722
Mizis TN, McFarlane JS (1969) Adhesion of solids and the effect of surface films. Proc R Soc 202A:224–243
Gelman AS (1970) The foundation of pressure welding. Mashinostroeniye Publ., Moscow, 312 p (in Russian)
Burchak GP (1997) The perfection of exploratory procedure of proper transverse oscillations. Fundamental problems of dynamics and mechanical strength of a railway vehicle, Festschrift, issue 912, MIIT Publ., Moscow, pp 3–12 (in Russian)
Johnson K (1989) Contact interaction mechanics (trans from Eng: Naumov VE, Spektor AA). Mir Publ., Moscow, 510 p (in Russian)
Savoskyn AN, Lyapushkin NN, Chuchin AA (2014) Prediction of characteristics of locomotive adhesion with rails. In: Proceedings of Xth international theoretical and practical conference “science and technologies: a step into the future-2014”. Education and Science Publ., Prague, pp 69–86 (in Russian)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Switzerland AG
About this paper

Cite this paper
Savoskin, A.N., Vasilev, A.P. (2019). Dislocation Model of Wheel–Rail Interaction with Locomotive Lateral Fluctuations. In: Radionov, A., Kravchenko, O., Guzeev, V., Rozhdestvenskiy, Y. (eds) Proceedings of the 4th International Conference on Industrial Engineering. ICIE 2018. Lecture Notes in Mechanical Engineering. Springer, Cham. https://doi.org/10.1007/978-3-319-95630-5_13
Download citation
DOI: https://doi.org/10.1007/978-3-319-95630-5_13
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-95629-9
Online ISBN: 978-3-319-95630-5
eBook Packages: EngineeringEngineering (R0)