
Abstract
The paper deals with linkages used to actuate the retractable top of convertible passenger car, which are either a simple articulated 4-bar mechanism or a stacking multi-contour n-bar mechanism. The car top that can fold or unfold is consisting of two or three hard components or flexible material as textile. In the case of flexible top, the folding space is smaller, occupying only a relative small volume of the trunk. The folding linkage of the hard top is a planar kinematic chain with articulated bars which allows the two or three top parts to be stacked into the trunk room. To be observed that the first hard component of the kinematic chain is the car rear screen and the second hard part is actually the retractable top. In order to fold the car top and the rear screen, the door trunk is actuated by means of a simple hinge pair or a 4-bar mechanism. In the case of a larger passenger car, the top consists of two parts and together with the rear screen form the open kinematic chain which can be closed by means of some stacked kinematic chains. Using CAD modeling and kinematic simulation of the retractable textile car top linkage used on convertibles, the mechanism efficiency regarding its operation can be improved. Through Inventor® software the user can modify any part or subassembly of the mechanism at any moment. This can be done by means of the parametric design which allows that any changing on a component to be instantaneous reflected on the assembly which that part belongs to.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Retractable Mechanisms of the Two-Section Roof
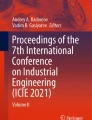
The simplest convertible car hardtop model is consisting of two articulated sections that form an open kinematic chain in vertical plane which is closed by a lever articulated to the roof itself, basically a 4-bar mechanism (Figs. 1 and 2).

Pictures of 2-position convertible car mechanism [1]

The kinematic scheme of the 4-bar mechanism (closed kinematic chain) and the trunk lid (articulated in D0)
Note that the first section of the kinematic chain constitutes the rear screen and the second section represents the hardtop (Fig. 1a).
To fold the hardtop and the rear screen, the trunk (boot) lid is opened by means of a hinge or a 4-bar mechanism.
The kinematic scheme of the bi-mobile mechanism highlights the 4-bar mechanism 0, 1, 2, 3 (A0ABB0) represented in two distinct positions and the bar 4 (trunk lid) which is articulated in D0 to the car body (Fig. 2).
The 4-bar mechanism is constituted as an open kinematic chain type LD (2, 3) which is closed by means of bar 1, the actuator link which connects the bar 2 to the body 0.
The characteristic lengths of the 4-bar mechanism are:
If the trunk lid is represented by the kinematic element 5 (Fig. 3), it performs rotation-translation [2, 3] by means of also a 4-bar mechanism 0, 4, 5, 6 (D0DEE0).

The kimematic scheme of the bi-mobile mechanism with two independent kinematic chains
This latter option allows for better opening of the trunk to receive the folded hardtop 2 and the rear screen 3 of the car.
2 The Folding Mechanism of the Three-Section Roof
In the case of large cars (Fig. 4), the roof itself is made of two hardtops and together with the rear screen it forms an open kinematic chain which can be closed by other kinematic chains.

The complex structure of the planar retractable mechanism consists of kinematic bar elements with two to eight rotate joints. The front section is attached to link 12, the middle section to link 6 and the rear section to link 18 (Fig. 5).

The kinematic scheme of the folding mechanism with complex structure
The complex bar mechanism for 3-section retractable roof is presented in other two distinct positions (Fig. 6). In the first picture (Fig. 6a) the three-section roof is continuing to fold with the first and the last sections on top of the middle one. The last figure shows the complete folding position in the trunk (Fig. 6b).

3 The Kinematic Geometry of the Complex Folding Mechanism of the Retractable Roof
The kinematic scheme [2, 5] of articulated planar mechanism (Fig. 7) is considered to be in an intermediate position of the piston 2 sliding in the pneumatic cylinder 1.

The kinematic scheme of the multi-contour mechanism
The characteristic dimensions (lengths) are:
In the first stage of design of the kinematic scheme it is considered that the fixed joint A0 is on the same vertical axis as the fixed joint B0.
The final position of point A0 will be established on the x0 axis taking in consideration that the angle of transmission τ between the piston rod 2 (Fig. 7) and balance 3 is greater than 10° (τmin = 10°).
This value will be reached in the maximum displacement position of the piston 2 in the oscillating cylinder 1 at the maximum extension.
The kinematic scheme of the analyzed mechanism is complex, consisting of five independent kinematic contours [2].
The topological structure of the articulated planar mechanism (Fig. 7) is obtained by amplifying the actuator mechanism consisting of the oscillating cylinder (1, 2) and the rocker 3, with three kinematic chains of the dyadic type [2]: LD (4, 5), LD (6, 7) and LD (8, 9).
The kinematic geometry of the mechanism depends on the displacement A0A = s21 of the piston 2 in the cylinder 1, which defines the length A0B = s21 + l2 (Fig. 7).
From the triangle Δ(A0BB0) the position angle \( \upvarphi_3 \) of the bar 3 is calculated:
The positioning angles of the bars and the associated vector contours are highlighted by the three polygons of vectors (Fig. 8).

The bar positioning angles and the three associated vector contours
For the geometric-kinematic calculation of the hardtop folding mechanism, each associated vector contour (Fig. 8) is projected in the order of composition.
The dyadic chain LD (4, 5) is modeled by the nonlinear scalar equations obtained from the projections of the vector contour (B0CDD0):
The angle φ3 is deduced from the formula (1), so that the system (2) is conveniently written, highlighting the unknowns φ4 and φ5 at this stage:
Then we consider the dyadic chain LD (6, 7) which is modeled by the vector contour (F0FED0). The scalar projection equations of this closed kinematic contour have the expressions:
The angle φ5 was calculated in the previous step, so that the system of nonlinear equations (4) is written by pointing out the unknown angles φ6 and φ7:
Finally, the dyadic chain LD (8,9) corresponds to the closed vector contour (EGHI) for which the nonlinear scalar equations are written:
Note that in these equations the angles φ5 and φ6 are previously calculated, so that the Eq. (6) are written as a system of two equations with the unknowns φ8 and φ9:
The Cartesian coordinates of point J, the end of the kinematic chain 7, 6, 9 (F0FIJ) (Fig. 8), are deduced from the formulas:
In formulas (8) the angle α9 is obtained from the triangle Δ(IH’H) by the formula:
Using the numerical angular values φ3, φ4, φ5, φ6, φ7, φ8 and φ9 deduced from the scalar equations (1) to (7), the successive positions of the hardtop configuration mechanism are calculated by means of MathCAD software.
4 Simulation of the Articulated Mechanism for Folding Textile Roof
To perform the simulation of the mechanism (Fig. 9) using the Autodesk Inventor Professional 2014 software, the following steps should be applied [6,7,8]:

The optimal kinematic scheme of multi-contour mechanism
-
Each component of the mechanism has to be modeled, the files having the extension “.ipt”.
-
In a file with the extension “.iam”, the mechanism is assembled by defining the constraints for each joint that connects two kinematic components.
-
“Drive Constrain” is required to set the initial and final position of the mechanism.
-
From the “Tools” menu the tab Inventor Studio has to be selected and then the Animation Timeline has to be set. Then, in the Browser on the right, the user should search for the “Drive Constrain” followed by the right-click and the selection from the newly opened Animate Constrains window. Here, the length of the movement from the initial position to the final position has to be determined.
-
Activation of the red button in the Animation Timeline window followed by Render Animation window where the following features should be specified: mechanism window dimensions, the type of light, the background type, and the Render type (Realistic or Illustration).
-
Running the Render command.
The saved file will have the extension “.wmv” and it should open with Windows Media Player or VLC Media Player. Note that on the left are all the components used for assembly and all the constraints defined in the kinematic joints (Fig. 10).

The assembly of the mechanism used to retract the textile roof
The advantage of using Inventor software is that during the assembling process of the mechanism the kinematic joints are also defined. Thus, the kinematic simulation of the mechanism is run directly after the assembly, specifying only the driving element.
In this case, the component (subassembly) that requires displacement is the actuator cylinder which is consisting of two components, namely the cylinder itself and the piston.
The driven (final) element is represented by the coupler 9 of which the end of the retractable textile of the convertible automobile is mounted. For the kinematic simulation, it is sufficient to define the piston as the driving element and to impose its stroke.
If the mechanism cannot be animated due to collisions between elements, it is necessary to identify exactly the wrong or misplaced component. If the error is constructive, the wrong dimension or geometry is corrected by direct dealing with the item in question. In this case of parameterized design, the advantage is that any modification made to a component is immediately reflected in the assembly. If the error is in the assembling process, the user has to intervene in this process and to verify that there are no collisions between the components of the mechanism.
The mechanism simulation recording is performed for at least one kinematic cycle and the movie of the simulation is automatically saved under the name “constrain.wmv”, with the possibility of changing the file name by the user. Therefore, by means of the simulation module the successive positions (Fig. 9) of the poly-articulate mechanism from the folded position (horizontal IJ bar) to the extended position (IJ bar rotated by 180°) are obtained.
5 The Convertible Mechanism of the Car Roof Made of 3 and 4 Rigid Components (Patent US06425622-20020720-D00000) [11,12,13]
5.1 The 3-Part Convertible Mechanism
The three rigid parts of the car roof are “lined” in the closed position of the hardtop (Fig. 11).

The kinematic scheme of the 3-part convertible mechanism
The characteristic dimensions of the articulated planar mechanism are:
The articulated planar mechanism mobility is deduced using the formula [9]:
In this case by identifying and substituting the parameters, the mechanism mobility is obtained:
For the “motor mechanism” MM (with the driving element 1), the mobility is verified using the topologic-structural formula:
Six kinematic chains of the dyadic type have been identified whose mobility is zero, so that the mobility of the actuator mechanism MA (0, 1) defines the mobility of the entire mechanism.
5.2 The Convertible Mechanism with 3 Hardtops and 2 Trunk Lid Parts
The mechanism of this type has a partial identical structure (Fig. 12) with the 3-part convertible mechanism (Fig. 11).

The scheme of the convertible mechanism with 3 hardtops and 2 trunk lid parts
The 3 + 2 parts correspond to the kinematic elements 11, 2, 7 (in this order from left to right P1, P2, P3 representing the roof) and the elements 17 (P4) and 19 (P5) respectively, representing the trunk lid (Fig. 12).
The characteristic geometric parameters are:
-
fixed point coordinates:
$$ A_{0} A = 47\,{\text{mm}};\,B_{0} B = 52;\,AB = 7.5;\,AC = 1;\,AF = 4;\,\,CH = FG = 16; $$ -
bar lengths and constant angles: FL = 4.5; MN = 4; NL = 14;
$$ \begin{aligned} & GH = 5;\,CD = 2;\,AE = 13;\,DE = 12.5;\,AK = 12.5;\,FK = 9;\,\,FI = 5;\,IJ = 9;\,KJ = 3.5;\,KM = 14;\,KL = 4;\, \\ & A_{0} O = 3.5;\,\angle (AA_{0} O) = 145^\circ ;\,OP = 47.5;\,PP_{0} = 4;\,P_{0} Q = 19;\,PQ = 16;\,P_{0} R = 15;\,QS = 7;\,QR = 10;\,RR_{0} = 27; \\ & ST = 10;\,TR = 4.5;\,TU = 27;\,RU = 25.5;\,R_{0} X = 24.5;\,UV = 4;\,VX = 26. \\ \end{aligned} $$
The convertible mechanism is mono-mobile, the mobility being calculated by the formula [10]:
In formula (13) m is the mobility of a kinematic joint, Cm is the number of kinematic joints with m mobilities, r is the rank of an independent kinematic contour and Nr is the number of the independent kinematic contours.
By observing the kinematic scheme (Fig. 12), we can say that all kinematic joints are planar with one mobility and their number is 28, and all kinematic contours are also planar and the number of these independent contours is 9.
By substituting these numerical values in formula (13) we have deduced the mobility:
Note that bar 1 (A0A) is the driving element, positioned by the angle φ1 measured directly. The operation of the articulated planar mechanism is structurally ensured by the possibility of writing the equation:
The constructive representations of the hardtops can be observed in the unfolding position (Fig. 13a) and in a middle position (Fig. 13b).

Representation of the 3 hardtops on the kinematic scheme in the open position (a) and, together with the other 2 trunk lid parts, in a middle position (b)
5.3 The 4-Part Convertible Mechanism
It is considered the kinematic scheme of the convertible mechanism (Fig. 14) which has a complex structure, being horizontally designed at the level of a 4-bar contour with two fixed joints A0 and B0.

The kinematic scheme of the convertible mechanism with 4 hardtops
The characteristic parameters of the mechanism are:
The four hardtops of the car roof are denoted as P1 rigidly connected with the kinematic element 17, P2 with the kinematic element 2, P3 with the kinematic element 7 and P4 with the kinematic element 11 (Fig. 14). The mechanism is made of 17 kinematic components connected by 25 kinematic articulated joints.
The mobility of the mechanism is deduced using the formula (10) and the outcome is:
The deducted mobility for the MM mechanism (with the driving element 1) is verified immediately by using the topologic-structural formula:
There have been identified 8 kinematic LD-type dyads whose mobility is zero, so that the mobility of the actuator mechanism MA (0,1) defines the mobility of the entire mechanism.
The constructive representation of the four hardtops can be observed in the unfolding position (Fig. 15).

Representation of the 4 hardtops on the kinematic scheme of the convertible mechanism in the closed position of the car roof
6 Conclusions
By modeling and simulation of the retractable mechanism of the textile roof used in convertible cars, improvements can be made in the efficiency of its operation.
Using the Inventor software the user can intervene at any time on any component or subassembly within the mechanism. This is possible thanks to the parameterized design that allows any changes to a component to be immediately reflected in the assembly to which it belongs.
Thus, the advantages of using CAD-CAM-CAE (Computer Aided Design - Manufacturing - Engineering) software in the design process of the mechanism are:
-
high precision;
-
reduced time;
-
minimum costs.
In addition, using the Product Lifecycle Management (PLM) software, it is possible to test the mechanism in question to detect any wear that may occur after a number of operating cycles.
Thus, it can be improved in terms of design or materials used in the design phase. In conclusion, the reliability of the prototype obtained will be superior, the mechanism operating at maximum efficiency.
References
Antonescu, O., Antonescu, P.: Mechanism and Machine Science – Coursebook. Politehnica Press, Bucharest (2016)
Peisach, E., Kikin, A.: Synmech: the computer system on synthesis of plane linkages. In: SYROM 1997, vol. I, Bucharest (1997)
Dumitru, N., Margine, Al.: The basis of modeling in Mechanical Engineering (in Romanian). Ed. Univ. Craiova (2002)
Stancescu, C.: Parametric and adaptive modeling using inventor (in Romanian). Editura FAST, Bucharest (2009)
Stancescu, C., Manolache, D.S., Parvu, C., Ghionea, I.G., Matei, M.T.: CAD using Autodesk Inventor (in Romanian). Ed. Fast, Bucharest (2008)
***. Autodesk Inventor Professional 2014 – Software documentation
Autorenkolektiv: Getriebetechnik, Aufgabensammlung. Veb Verlag Technik, Berlin (1971)
Antonescu, P.: General formula for the DOF of complex structure of manipulators and robots. In: 10th World Congress on the TMM, vol. 2, Oulu (1999)
Harrison III, A.W.: Patent US 7287801 B2: Convertible top mechanism with inwardly articulating rearmost lateral rails
Tokarz, S.P.: Patent US 5772274 A: Motorized drive system for a convertible roof of an automotive vehicle
***. Patent US 6336673 B1: Convertible vehicle
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Switzerland AG
About this paper

Cite this paper
Antonescu, D., Iozsa, D., Antonescu, O., Fratila, G. (2019). Modeling and Simulation of the Specific Mechanisms Used in Convertible Automobiles. In: Burnete, N., Varga, B. (eds) Proceedings of the 4th International Congress of Automotive and Transport Engineering (AMMA 2018). AMMA2018 2018. Proceedings in Automotive Engineering. Springer, Cham. https://doi.org/10.1007/978-3-319-94409-8_1
Download citation
DOI: https://doi.org/10.1007/978-3-319-94409-8_1
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-94408-1
Online ISBN: 978-3-319-94409-8
eBook Packages: EngineeringEngineering (R0)