
Abstract
In this chapter we are going to develop the details of a theory pertaining to Lie Algebras which, although it has its roots in mathematical work of the 1960s (Satake in Ann Math 71:77–110, 1960, [1], Tits in Algebraic Groups and Discontinuous Subgroups, Proceedings of Symposia in Pure Mathematics, Boulder, Colorado, 1965, p. 33–62 [2], Borel, Tits in Groupes réductifs. Publications Mathémathiques de l’IHES 27: 55–151, 1965; Compléments à l’article 41:253–276 1972, [3]), contributed by two great algebrists, Jacques Tits and Ichiro Satake (see Fig. 5.1), yet fully revealed its profound significance for Geometry and Physics only much later, by the end of the XXth century, and within the context of supergravity.
Quamlibet immani proiectu corporis extet, Lucretius, De Rerum Natura, 3, 987
Access provided by CONRICYT-eBooks. Download chapter PDF
Similar content being viewed by others

5.1 Historical Introduction
In this chapter we are going to develop the details of a theory pertaining to Lie Algebras which, although it has its roots in mathematical work of the 1960s [1,2,3], contributed by two great algebrists, Jacques Tits and Ichiro Satake (see Fig. 5.1), yet fully revealed its profound significance for Geometry and Physics only much later, by the end of the XXth century, and within the context of supergravity.

On the left J. Tits (1930 Uccle, Belgium). On the right Ichiro Satake (1927 Yamaguchi Japan - 2014 Tokyo Japan). Jacques Tits was born in Uccle, on the southern outskirts of Brussels. He graduated from the Free University of Brussels in 1950 with a dissertation Généralisation des groupes projectifs basés sur la notion de transitivité. From 1956 to 1962 Tits was an assistant at the University of Brussels. He became professor there in 1962 and remained in this role for two years before accepting a professorship at the University of Bonn in 1964. In 1973 he was offered the Chair of Group Theory at the College de France which he occupied until his retirement in 2000 being naturalised French citizen since 1974. Jacques Tits has given very prominent contributions to the advancement of Group Theory in many directions and he is especially known for the Theory of Buildings, which he founded, and for the Tits alternative, a theorem on the structure of finitely generated groups. After his retirement from the College the France, a special Vallée-Poussin Chair was created for him at the University of Louvain. Ichiro Satake was born in the Province of Yamaguchi in Japan and graduated from the University of Tokyo in 1959. He held various academic positions in the USA and since 1968 to his retirement in 1983 he was Full Professor of Mathematics at the University of California, Berkeley. He is specially known for his contributions to the theory of algebraic groups and for the Satake diagrams that classify the real forms of a complex Lie algebra
The addressed topics is the Tits–Satake projection, a construction which, according to certain rules, from a class of homogeneous manifolds, extracts a single representative of the entire class. What is extremely surprising and inspiring is that such a projection, invented long before the advent of supergravity special geometries, has very nice properties with respect to special structures. Indeed it maps special Kähler manifolds into special Kähler manifolds, quaternionic Kähler into quaternionic Kähler and commutes with the c-map discussed in the previous section. Actually it also commutes with another map, the \(c^\star \)-map, which is relevant for the construction of supergravity black-hole solutions and will be illustrated in this chapter.
A conceptual procedure specially cheered by theoretical physicists is that of Universality Classes. Considering complex phenomena like, for instance, phase-transitions one looks for universal features that are the same for entire classes of such phenomena. After grouping the multitude of cases into universality classes, one tries to construct a theoretical model of the behavior shared by all elements of each class. A mathematical well founded projection is likely to provide a powerful weapon to this effect. Indeed one might expect that there are universal features shared by all cases that have the same projection and that the theoretical model of this shared behavior is encoded in the algebraic structure of the projection image. We will see that this is precisely what happens with the Tits–Satake projection that captures universal geometrical features of supergravity models.
Since the interplay between Mathematics and Theoretical Physics has been essential in the development of this new chapter of homogeneous space geometry we briefly recall the key facts of this short but intellectually intense history.
-
(1)
In the early 1990s, as we have already reported, B. de Wit, A. Van Proeyen, F. Vanderseypen studied the classification of homogeneous special manifolds admitting a solvable transitive group of isometries [4,5,6]. This work extended and completed the results obtained several years before by Alekseevsky in relation with the classification of quaternionic manifolds also admitting a transitive solvable group of isometries [7].
-
(2)
In 1996–1998, L. Andrianopoli, R. D’Auria, S. Ferrara, P. Fré and M. Trigiante explored the general role of solvable Lie algebras in supergravity [8,9,10], pointing out that, since all homogenous scalar manifolds of all supergravity models are of the non-compact type, they all admit a description in terms of a solvable group manifold as we explained in Sect. 2.5. The solvable representation of the scalar geometry was shown to be particularly valuable in connection with the description of BPS black hole solutions of various supergravity models.
-
(3)
In the years 1999–2005 Thibaut Damour, Marc Henneaux, Hermann Nicolai, Bernard Julia, F. Englert, P. Spindel and other collaborators, elaborating on old ideas of V.A. Belinsky, I.M. Khalatnikov, E.M. Lifshitz [11,12,13], introduced the conception of rigid cosmic billiards [14,15,16,17,18,19,20,21,22,23,24,25,26,27]. According to this conception the various dimensions of a higher dimensional gravitational theory are identified with the generators of the Cartan Subalgebra \(\mathscr {H}\) of a supergravity motivated Lie algebra and cosmic evolution takes place in a Weyl chamber of \(\mathscr {H}\). Considering the Cartan scalar fields as the coordinate of a fictitious ball, during cosmic evolution such a ball scatters on the walls of the Weyl chambers and this pictorial image of the phenomenon is at the origin of its denomination cosmic billiard. In this context the distinction between compact and non-compact directions of the Cartan subalgebra appeared essential and this brought the Tits Satake projection into the game.
-
(4)
In 2003–2005 F. Gargiulo, K. Rulik, P. Fré, A.S. Sorin and M. Trigiante developed the conception of soft cosmic billiards [28,29,30], corresponding to exact, purely time dependent solutions of supergravity, including not only the Cartan fields but also those associated with roots which dynamically construct the Weyl chamber walls advocated by rigid cosmic billiards.
-
(5)
In 2005, Fré, Gargiulo and Rulik constructed explicit examples of soft cosmic billiards in the case of a non maximally split symmetric manifold. In that context they analyzed the role of the Tits Satake projection and introduced the new mathematical concept of Paint Group [31].
-
(6)
In 2007, P. Fré, F. Gargiulo, J. Rosseel, K. Rulik, M. Trigiante and A. Van Proeyen [32] axiomatized the Tits Satake projection for all homogeneous special geometries. They based their formulation of the projection on the intrinsic definition of the Paint Group as the group of outer automorphisms of the solvable transitive group of motion of the homogeneous manifold. This is the theory that will be explained in this chapter. Up to the knowledge of this author, this theory was never previously developed in the mathematical literature.
-
(7)
In the years 2009–2011 the integration algorithm utilized in the framework of soft cosmic billiards was extended by P. Fré, A.S. Sorin and M. Trigiante to the case of spherical symmetric black-holes for manifolds in the image of the \(c^\star \)-map [33,34,35].
-
(8)
In 2011, P. Fré, A.S. Sorin and M. Trigiante demonstrated that the classification of nilpotent orbits for a non maximally split Lie algebra depends only on its Tits–Satake projection and it is a property of the Tits–Satake universality class (see Chap. 6).
Through the above sketched historical course, which unfolded in about a decade, the theory of the Tits–Satake projection has acquired a quite solid and ramified profile, intertwined with the c and \(c^\star \) maps that opens new viewpoints and provides new classification tools in the geometry of homogeneous manifolds and symmetric spaces. Although the theory is distinctively algebraic and geometric, yet it is poorly known in the mathematical community due to its supergravity driven origins. Hopefully the present exposition will improve its status in the mathematical club.
We turn next to a systematic discussion of the \(c^\star \)-map environment where the Tits–Satake projection is best understood and most useful.
5.2 Physical-Mathematical Introduction
In the previous chapter we provided the definition of special Kähler geometry and of quaternionic Kähler geometry. In the context of \(\mathscr {N}=2\) supergravity, as we stressed there, the two types of geometries are respectively pertinent to the scalars included in the vector multiplets and to those pertinent to the hypermultiplets. The next main focus of attention was the c-map from Special Kähler Manifolds of complex dimension n to quaternionic Kähler manifolds of real dimension \(4n+4\):
What we did not emphasize in the previous chapter is that the c-map follows from the systematic procedure of dimensional reduction from a \(D=4,\mathscr {N}=2\) supergravity theory to a \(D=3\) \(\sigma \)-model endowed with \(\mathscr {N}=4\) three-dimensional supersymmetry. We recall this point here since it helps understanding another very similar map that we are going to consider in this chapter and that we name the \(c^\star \)-map. Naming \(z^i\) the scalar fields that fill the special Kähler manifold \(\mathscr {SK}_{n}\) and \(g_{i{j^\star }}\) its metric, the \(D=3\) \(\sigma \)-model which encodes all the supergravity field equations after dimensional reduction on a space-like direction admits, as target manifold, a quaternionic manifold whose \(4n+4\) coordinates we name as follows:
and whose quaternionic metric has the general form that we discussed at length in Chap. 4.
The \(c^\star \)-map arises in a similar way from dimensional reduction but along a time-like direction. Let us see in which context this takes place.
5.2.1 Black Holes and the Geometry of Geometries
In the last twenty years a lot of interest was devoted to study black-hole solutions of pure and matter coupled \(\mathscr {N}\)-extended supergravity theories, the case \(\mathscr {N}=2\) being the most widely considered. Generally speaking a black-hole solution of matter coupled supergravity is an exact solution of the bosonic field equations where all the items of geometry that we have been so far studying are involved. Let us get an orientation on this exciting entanglement of several geometries.
The general form of a bosonic supergravity lagrangian in \(D=4\) is the following one:
The fields included in the theory are the metric \(g_{\mu \nu }(x)\), \(n_{\mathbf {v}}\) abelian gauge fields \(A^\varLambda _{ {\nu }}\), whose field strengths (or curvatures) we have denoted by \(F_{ {\mu } {\nu }}^\varLambda \equiv (\partial _{ {\mu }}A^\varLambda _{ {\nu }}-\partial _{ {\nu }}A^\varLambda _{ {\mu }})/2\) and \(n_{\mathbf {s}}\) scalar fields \(\phi ^a\) that parameterize a scalar manifold \( \mathscr {M}_{scalar}^{D=4}\) that, for supersymmetry \(\mathscr {N} > 2\), is necessarily a coset manifold:
\(\mathrm {U}_{\mathrm {D}=4}\) being a non-compact real form of a semi-simple Lie group, essentially fixed by supersymmetry and \(\mathrm {H}_c\) its maximal compact subgroup. For \(\mathscr {N}=2\) Eq. (5.2.4) is not obligatory yet it is possible: a well determined class of symmetric homogeneous manifolds that are special Kähler manifolds fall into the set up of the present general discussion.
Hence we see that we are dealing with geometries at three levels:
-
1.
We deal with the geometry of space-time \(\mathscr {M}^{st}_{4}\), encoded in its metric \(g_{\mu \nu }\) which is dynamical, in the sense that we have to determine it through the solution of field equations, many possibilities being available, among which we have black-hole geometries with event horizons and all the rest.
-
2.
We deal with connections on a fiber bundle \(P\left( \mathscr {G},\mathscr {M}^{st}_{4}\right) \), whose base manifold is the dynamically determined space-time \(\mathscr {M}^{st}_{4}\) and whose structural group is an abelian group \(\mathscr {G}\) of dimension equal to the number \(n_{\mathbf {v}}\) of involved gauge fields. These connections are also dynamical in the sense that they have to be determined as solutions of the coupled field equations.
-
3.
We deal with a fixed Riemannian geometry encoded in the target manifold (5.2.4) of which the scalar fields \(\phi ^a\) are local coordinates. Any solution of the coupled field equations defines a map
$$\begin{aligned} \phi \quad : \quad \mathscr {M}^{st}_{4} \, \rightarrow \, \mathscr {M}_{scalar}^{D=4} \end{aligned}$$(5.2.5)of space-time into the scalar manifold.
There is still encoded into the lagrangian (5.2.3) another geometrical datum of utmost relevance. Let us describe it. Considering the \(n_{\mathrm {v}}\) vector fields \(A_{{\mu }}^\varLambda \) let
denote the self-dual (respectively antiself-dual) parts of the field-strengths. As displayed in Eq. (5.2.3) they are non minimally coupled to the scalars via the symmetric complex matrix
The key point is that the isometry group \(\mathrm {U}_{\mathrm {D}=4}\) of the scalar manifold (5.2.4) is promoted to a symmetry of the entire lagrangian through the projective transformations of \(\mathscr {N}_{\varLambda \varSigma }\) under the group action.
Indeed the field strengths \({\mathscr {F}}^{\pm | \varLambda }_{\mu \nu }\) plus their magnetic duals:
fill up a \(2\, n_\mathrm {v}\)-dimensional symplectic representation of \(\mathbb {U}_{\mathrm {D}=4}\) which we call by the name of \(\mathbf {W}\).
We rephrase the above statements by asserting that there is always a symplectic embedding of the duality group \(\mathrm {U}_{D=4}\),
so that for each element \(\xi \in \mathrm {U}_{D=4}\) we have its representation by means of a suitable real symplectic matrix:
satisfying the defining relation:
Under an element of the duality group the field strengths transform as follows:
where, by their own definitions we get:
and the complex symmetric matrix \(\mathscr {N}\) should transform as follows:
Choose a parametrization of the coset \(\mathbb {L}(\phi ) \in \mathrm {U}_{\mathrm {D}=4}\), which assigns a definite group element to every coset point identified by the scalar fields. Through the symplectic embedding (5.2.10) this produces a definite \(\phi \)-dependent symplectic matrix
in the \(\mathbf {W}\)-representation of \(\mathrm {U}_{\mathrm {D}=4}\). In terms of its blocks the kinetic matrix \(\mathscr {N}(\phi )\) is explicitly given by a formula that was found at the beginning of the 1980s by Gaillard-Zumino [36]:
The matrix \(\mathscr {N}\) is the same which appears in the definition of special Kähler geometry and it transforms according to Eq. (5.2.14).
Summarizing the geometrical structure of the bosonic supergravity lagrangian is essentially encoded in two data. The duality-isometry group \(U_{D=3}\) and its symplectic representation \(\mathbf {W}\) that corresponds to the embedding (5.2.9).
A brilliant discovery occurred in the first two decades of the XXIst century can be dubbed as the \(D=3\) approach to supergravity black-holes. Mainly originating from the contributions included in the following papers [37,38,39,40,41,42,43], it consists of the following.
The radial dependence of all the relevant functions parameterizing the supergravity solution can be viewed as the field equations of another one-dimensional \(\sigma \)-model where the evolution parameter \(\tau \) is actually a monotonic function of the radial variable r and where the target manifold is a pseudo-quaternionic manifold \(\mathscr {Q}^\star _{(4n+4)}\) related to the quaternionic manifold \(\mathscr {Q}_{(4n+4)}\) in the following way. The coordinates of \(\mathscr {Q}^\star _{(4n+4)}\) are the same as those of \(\mathscr {Q}_{(4n+4)}\), while the two metrics differ only by a change of sign. Indeed we have
In Eqs. (5.2.17) and (5.2.18), \(\mathbb {C}\) denotes the \((2n+2)\times (2n+2)\) antisymmetric matrix defined over the fibers of the symplectic bundle characterizing special geometry, while the negative definite, \((2n+2)\times (2n+2)\) matrix \(\mathscr {M}_4(z,{\bar{z}})\) is the one already introduced in Eq. (4.3.3). The pseudo-quaternionic metric is non-Euclidean and it has the following signature:
In this way we arrive at a Geometry of the Geometries. As solutions of the \(\sigma \)-model defined by the metric (5.2.18), all spherically symmetric black-holes correspond to geodesics and consequently a geodetic in the manifold \(\mathscr {Q}^\star \) encodes all the geometrical structures listed below:
-
(a)
A spherical black-hole metric,
-
(b)
a spherical symmetric connection on the fiber bundle \(P\left( \mathscr {G},\mathscr {M}^{st}_{4}\right) \)
-
(c)
a spherical symmetric map from \(\mathscr {M}^{st}_{4}\) into the manifold (5.2.4)
The indefinite signature (5.2.19) introduces a clear-cut distinction between non-extremal and extremal black-holes: the non-extremal ones correspond to time-like geodesics, while the extremal black-holes are associated with light-like ones. Space-like geodesics produce supergravity solutions with naked singularities [37].
In those cases where the Special Manifold \(\mathscr {SK}_n\) is a symmetric space \(\frac{\mathrm {U}_{\mathrm {D}=4}}{\mathrm {H}_{\mathrm {D}=4}}\) also the quaternionic manifold defined by the metric (5.2.17) is a symmetric coset manifold:
where \(\mathrm {H}_{\mathrm {D}=3}\subset \mathrm {U}_{\mathrm {D}=3}\) is the maximal compact subgroup of the \(\mathrm {U}\)-duality group, in three dimensions \(\mathrm {U}_{\mathrm {D}=3}\). The change of sign in the metric (5.2.19) simply turns the coset (5.2.20) into a new one:
where \(\mathrm {H}_{\mathrm {D}=3}^\star \subset \mathrm {U}_{\mathrm {D}=3}\) is another non-compact maximal subgroup of the \(\mathrm {U}\)-duality group whose Lie algebra \(\mathbb {H}^\star \) happens to be a different real form of the complexification of the Lie algebra \(\mathbb {H}\) of \(\mathrm {H}_{\mathrm {D}=3}\). That such a different real form always exists within \(\mathrm {U}_{\mathrm {D}=3}\) is one of the group theoretical miracles of supergravity.
5.2.2 The Lax Pair Description
Once the problem of black-holes is reformulated in terms of geodesics within the coset manifold (5.2.21) a rich spectrum of additional mathematical techniques becomes available for its study and solution.
The most relevant of these techniques is the Lax pair representation of the supergravity field equations. According to a formalism reviewed in papers [34, 44], the fundamental evolution equation takes the following form:
where the so named Lax operator \(L(\tau )\) and the connection \(W(\tau )\) are Lie algebra elements of \(\mathbb {U}\) respectively lying in the orthogonal subspace \(\mathbb {K}\) and in the subalgebra \(\mathbb {H}^\star \) in relation with the decomposition:
As it was proven in [29, 33,34,35], both for the case of the coset (5.2.20) and the coset (5.2.21), the Lax pair representation (5.2.22) allows the construction of an explicit integration algorithm which provides the finite form of any supergravity solution in terms of two initial conditions, the Lax \(L_0 =L(0)\) and the solvable coset representative \(\mathbb {L}_0 \, = \, \mathbb {L}(0)\) at radial infinity \(\tau =0\).
The action of the global symmetry group \(\mathrm {U}_{\mathrm {D}=3}\) on a geodesic can be described as follows: By means of a transformation \(\mathrm {U}_{\mathrm {D}=3}/\mathrm {H}^\star \) we can move the “initial point” at \(\tau =0\) (described by \(\mathbb {L}_0\)) anywhere on the manifold, while for a fixed initial point we can act by means of \(\mathrm {H}^\star \) on the “initial velocity vector”, namely on \(L_0\). Since the action of \(\mathrm {U}_{\mathrm {D}=3}/\mathrm {H}^\star \) is transitive on the manifold, we can always bring the initial point to coincide with the origin (where all the scalar fields vanish) and classify the geodesics according to the \(\mathrm {H}^\star \)-orbit of the Lax matrix at radial infinity \(L_0\). Since the evolution of the Lax operator occurs via a similarity transformation of \(L_0\) by means of a time evolving element of the subgroup \(\mathrm {H}^\star \), it will unfold within one \(\mathrm {H}^\star \)-orbit.
The main goal is then that of classifying all possible solutions by means of \(\mathbb {H}^\star \)-orbits within \(\mathbb {K}\) which, in every supergravity based on homogeneous scalar geometries, is a well defined irreducible representation of \(\mathbb {H}^\star \).
5.2.3 Nilpotent Orbits and Tits Satake Universality Classes
As it was discussed in [44] and in previous literature, regular extremal black-holes are associated with Lax operators \(L(\tau )\) that are nilpotent at all times of their evolution. Hence the classification of extremal black-holes requires a classification of the orbits of nilpotent elements of the \(\mathbb {K}\) space with respect to the stability subgroup \(\mathbb {H}^\star \subset \mathrm {U}_{\mathrm {D=3}}\). This is a well posed, but difficult, mathematical problem. In [44] it was solved for the case of the special Käher manifold \(\frac{\mathrm {SU(1,1)}}{\mathrm {U(1)}}\) which, upon time-like dimensional reduction to \(D=3\), yields the pseudo quaternionic manifold \(\frac{\mathrm {G}_{(2,2)}}{\mathrm {SU(1,1)} \times \mathrm {SU(1,1)}}\). It would be desirable to extend the classification of such nilpotent orbits to supergravity models based on all the other special symmetric manifolds. Although these latter fall into a finite set of series, some of them are infinite and it might seem that we need to examine an infinite number of cases. This is not so because of a very important property of special geometries and of their quaternionic descendants.
This relates to the Tits–Satake (TS) projection of special homogeneous (SH) manifolds:
which was analysed in detail in [32], together with the allied concept of Paint Group that had been introduced previously in [31]. What it is meant by this wording is the following. It turns out that one can define an algorithm, the Tits–Satake projection \(\pi _\mathrm{TS}\), which works on the space of homogeneous manifolds with a solvable transitive group of motions \(\mathscr {G}_M\), and with any such manifold associates another one of the same type. This map has a series of very strong distinctive features:
-
1.
\(\pi _\mathrm{TS}\) is a projection operator, so that several different manifolds \(\mathscr {SH}_i\) (\(i=1,\dots ,r\)) have the same image \(\pi _\mathrm{TS}\left( \mathscr {SH}_i \right) \).
-
2.
\(\pi _\mathrm{TS}\) preserves the rank of \(\mathscr {G}_M\) namely the dimension of the maximal Abelian semisimple subalgebra (Cartan subalgebra) of \(\mathscr {G}_M\).
-
3.
\(\pi _\mathrm{TS}\) maps special homogeneous into special homogeneous manifolds. Not only. It preserves the two classes of manifolds discussed above, namely maps special Kähler into special Kähler and maps Quaternionic into Quaternionic
-
4.
\(\pi _\mathrm{TS}\) commutes with c-map, so that we obtain the following commutative diagram:
 (5.2.25)
(5.2.25)

The main consequence of the above features is that the whole set of special homogeneous manifolds and hence of associated supergravity models is distributed into a set of universality classes which turns out to be composed of extremely few elements.
If we confine ourselves to homogenous symmetric special geometries, which are those for which we can implement the integration algorithm based on the Lax pair representation, then the list of special symmetric manifolds contains only eight items among which two infinite series. They are displayed in the first column of Table 5.1. The c-map produces just as many quaternionic (Kähler) manifolds, that are displayed in the second column of the same table. Upon the Tits–Satake projection, this infinite set of models is organized into just five universality classes that are displayed on the third column of Table 5.1. The key-feature of the projection, relevant to our purposes is that all of its properties extend also to the pseudo-quaternionic manifolds produced by a time-like dimensional reduction. We can say that there exists a \(c^\star \)-map defined by this type of reduction, which associates a pseudo-quaternionic manifold with each special Kähler manifold. The Tits–Satake projection commutes also with the \(c^\star \)-map and we have another commutative diagram:

By means of this token, we obtain Table 5.2, perfectly analogous to Table 5.1 where the Pseudo-Quaternionic manifolds associated which each symmetric special geometry are organized into five distinct Tits Satake universality classes.
Hence we have the following:
Statement 5.2.1
The number, structure and properties of \(\mathrm {H}^\star \) orbits of \(\mathbb {K}\) nilpotent elements depend only on the Tits Satake universality class and it is an intrinsic property of the class.
So it suffices to determine the classification of nilpotent orbits for the five manifolds appearing in the third column of Table 5.2.
In Chap. 6 we will work out the details for the simplest case corresponding to the second line in Table 5.2. The details of the algorithm should be clear from such an illustration. In [45] the following case was studied in detail:
which corresponds to one of the possible couplings of \(2+2s\) vector multiplets.
Upon space-like dimensional reduction to \(D=3\) and dualization of all the vector fields, a supergravity model of this type becomes a \(\sigma \)-model with the following quaternionic manifold as target space:
as mentioned in Table 5.1. If we perform instead a time-like dimensional reduction, as it is relevant for the construction of black-hole solutions, we obtain an Euclidean \(\sigma \)-model where, as mentioned in Table 5.2 the target space is the following pseudo-quaternionic manifold:
The Tits Satake projection of all such manifolds is:
We refer the reader to [45] for the explicit construction of nilpotent orbits pertaining to this example.
5.3 The Tits Satake Projection
The arguments exposed in the previous section should have convinced the reader of the high relevance of the Tits–Satake projection, both in the context of black-holes and in the context of other geometrical aspects of supergravity theory, a notable one being that of gauging. For this reason the remaining part of this chapter is devoted to the illustration of the rich mathematical theory underlying this projection.
In this section we explain the Tits–Satake projection of a metric solvable Lie algebra and how it is related to the notions of paint group \(\mathrm {G}_{\mathrm {paint}}\) and subpaint group \(\mathrm {G}_{\mathrm {subpaint}} \subset \mathrm {G}_{\mathrm {paint}}\). Although the Tits–Satake projection can be defined for general solvable Lie algebras, our main interest is in symmetric spaces and the just mentioned notions have been extracted precisely from the case of the Tits–Satake projections of solvable Lie algebras associated with symmetric spaces \(\mathrm{Solv}(\mathrm {G/H})\). On these latter we focus.
5.3.1 The TS-Projection for Non Maximally Split Symmetric Spaces
Following the discussion of Sect. 2.4 let us recall that if the scalar manifold of supergravity is a non maximally noncompact manifold \(\mathrm {G/H}\) the Lie algebra of the numerator group is some appropriate real form \(\mathbb {G}_R\) of a complex Lie algebra \(\mathbb {G}\). The Lie algebra \(\mathbb {H}\) of the denominator \(\mathrm {H}\) is the maximal compact subalgebra \(\mathbb {H} \subset \mathbb {G}_R\). Denoting, as usual, by \(\mathbb {K}\) the orthogonal complement of \(\mathbb {H}\) in \(\mathbb {G}_R\):
and defining as noncompact rank or rank of the coset \(\mathrm {G/H}\) the dimension of the non-compact Cartan subalgebra (see Eq. (2.4.3), we obtain that \(r_\mathrm{nc} \le \text {rank}(\mathbb {G})\), where the equality is the statement that the manifold is maximally noncompact (or ‘maximally split’).
When the equality is strict, the manifold \(\mathrm {G}_{\mathrm {R}}\mathrm {/H}\) is still metrically equivalent to a solvable group manifold but the form of the solvable Lie algebra \(\mathrm{Solv}(\mathrm {G}_\mathrm {R}\mathrm {/H})\), whose structure constants define the Nomizu connection, is more complicated than in the maximally non-compact case. It was discussed and explained in Sect. 2.5.1. The Tits–Satake theory of non-compact cosets and split subalgebras is a classical topic in Differential Geometry and appears in some textbooks. Within such a mathematical framework there is a peculiar universal structure of the solvable algebra \(\mathrm{Solv}(\mathrm {G}_\mathrm {R}\mathrm {/H})\) that had not been observed before [31] namely that of paint and subpaint groups which extends beyond symmetric spaces as it was demonstrated in [32].
Explicitly we have the following scheme. One can split the Cartan subalgebra into its compact and non-compact subalgebras as shown in Eq. (2.4.17) and these parts are orthogonal using the Cartan-Killing metric. Therefore, every vector in the dual of the full Cartan subalgebra, in particular every root \(\alpha \), can be decomposed into its transverse and parallel part to \(\mathscr {H}^\mathrm{nc}\) as it was done in Eq. (2.4.19).
The Tits–Satake projection consists of two steps. First one sets all \(\alpha _{\bot } = 0 \), projecting the original root system \(\varDelta _\mathbb {G}\) onto a new system of vectors \(\overline{\varDelta }\) living in a Euclidean space of dimension equal to the non-compact rank \(r_\mathrm{nc}\). The set \(\overline{\varDelta }\) is called a restricted root system. It is not an ordinary root system in the sense that roots can occur with multiplicities different from one and \(2\alpha _{||}\) can be a root if \(\alpha _{||}\) is one. In the second step, one deletes the multiplicities of the restricted roots. Thus we have

If \(\overline{\varDelta }\) contains no restricted root that is the double of another one, then \(\varDelta _\mathrm{TS}\) is a root system of simple type. We will show later that this root subsystem defines a Lie algebra \(\mathbb {G}_{\mathrm {TS}}\), the Tits–Satake subalgebra of \(\mathbb {G}_R\):
The Tits–Satake subalgebra \(\mathbb {G}_{\mathrm {TS}}\) is, as a consequence of its own definition, the maximally non-compact real section of its own complexification. For this reason, considering its maximal compact subalgebra \(\mathbb {H}_{\mathrm {TS}} \, \subset \, \mathbb {G}_{\mathrm {TS}}\) we have a new smaller coset \(\mathrm {G}_{\mathrm {TS}} / \mathrm {H}_{\mathrm {TS}}\) which is maximally split and whose associated solvable algebra \(\mathrm{Solv}(\mathrm {G}_{\mathrm {TS}} / \mathrm {H}_{\mathrm {TS}})\) has the standard structure utilized in [29] to prove complete integrability of supergravity compactified to 3 dimensions. This result demonstrates the relevance of the Tits–Satake projection.
In the case doubled restricted roots are present in \(\overline{\varDelta }\), the projection cannot be expressed in terms of a simple Lie algebra, but the concept remains the same. The root system is the so-called \(bc_r\) system, with \(r=r_\mathrm{nc}\) the non-compact rank of the real form \(\mathbb {G}\). It is the root system of a group \(\mathrm {G}_{\mathrm {TS}}\), which is now non-semi-simple. The manifold is similarly defined as \(\mathrm {G}_{\mathrm {TS}}/\mathrm {H}_{\mathrm {TS}}\), where \(\mathrm {H}_{\mathrm {TS}}\) is the maximal compact subgroup of \(\mathrm {G}_{\mathrm {TS}}\).
The next question is: what is the relation between the two solvable Lie algebras \(\mathrm{Solv}(\mathrm {G}_{\mathrm {R}} / \mathrm {H})\) and \(\mathrm{Solv}(\mathrm {G}_{\mathrm {TS}} / \mathrm {H}_{\mathrm {TS}})\)? The answer can be formulated through the following statements A-E.
[A]
In a projection more than one higher dimensional vector can map to the same lower dimensional one. This means that in general there will be several roots of \(\varDelta _\mathbb {G}\) that have the same image in \(\varDelta _\mathrm{TS}\). The imaginary roots vanish under this projection, according to the definition of Sect. 2.5. Therefore, apart from these imaginary roots, there are two types of roots: those that have a distinct image in the projected root system and those that arrange into multiplets with the same projection. We can split the root spaces in subsets according to whether there is such a degeneracy or not. Calling \(\varDelta ^+_\mathbb {G}\) and \(\varDelta _\mathrm{TS}^+\) the sets of positive roots of the two root systems, we have the following scheme:
The \(\delta \) part thus contains all the roots that have multiplicities under the Tits–Satake projection while the roots in the \(\eta \) part have no multiplicities. These roots of type \(\eta \) are orthogonal to \(\varDelta _{\mathrm {comp}}\). Indeed, this follows from the fact that for any two root vectors \(\alpha \) and \(\beta \) where there is no root of the form \(\beta +m\alpha \) with m a non-zero integer, the inner product of \(\beta \) and \(\alpha \) vanishes. It also follows from this definition that in maximally split symmetric spaces, in which case \(\varDelta _{\mathrm {comp}}=\emptyset \), all root vectors are in \(\varDelta ^\eta \) or \(\varDelta ^\ell \) (as the Tits–Satake projection is then trivialized).
These subsets moreover satisfy the following properties under addition of root vectors:

Because of this structure we can enumerate the generators of the solvable algebra \(\mathrm{Solv}(\mathrm {G}_{\mathrm {R}}/\mathrm {H})\) in the following way:
The index I enumerating the m-roots of \(\varDelta _{\mathbb {G}_R}\) that have the same projection in \(\varDelta _{\mathrm {TS}}\) is named the paint index.
[B]
There exists a compact subalgebra \(\mathbb {G}_{\mathrm {paint}} \, \subset \, \mathbb {G}_R\) which acts as an algebra of outer automorphisms (i.e. outer derivatives) of the solvable algebra \(\mathrm{Solv}_{\mathbb {G}_R} \equiv \mathrm{Solv}(\mathrm {G}_{\mathrm {R}} / \mathrm {H}) \subset \mathbb {G}_R\), namely:
[C]
The Cartan generators \(H_i\) and the generators \(\varPhi _{\alpha ^\ell } \) are singlets under the action of \(\mathbb {G}_\mathrm{paint}\), i.e. each of them commutes with the whole of \(\mathbb {G}_\mathrm{paint}\):
On the other hand, each of the multiplets of generators \(\varOmega _{\alpha ^s | I}\) constitutes an orbit under the adjoint action of the paint group \({G}_{\mathrm {paint}}\), i.e. a linear representation \(\mathbf {D}{[\alpha ^s]}\) which, for different roots \(\alpha ^s\) can be different:
[D]
The paint algebra \(\mathbb {G}_{\mathrm {paint}}\) contains a subalgebra
such that with respect to \(\mathbb {G}^0_{\mathrm {subpaint}}\), each \(m[\alpha ^s]\)-dimensional representation \(\mathbf {D}{[\alpha ^s]}\) branches as follows:
Accordingly we can split the range of the multiplicity index I as follows:
The index 0 corresponds to the singlet, while x ranges over the representation \(\mathbf {J}\).
[E]
The tensor product \(\mathbf {J} \otimes \mathbf {J} \) contains both the identity representation \(\mathbf {1}\) and the representation \(\mathbf {J}\) itself. Furthermore, there exists, in the representation \(\bigwedge ^3 \mathbf {J}\) a \(\mathbb {G}^0_{\mathrm {subpaint}}\)-invariant tensor \(a^{xyz}\) such that the two solvable Lie algebras \(\mathrm{Solv}_{\mathbb {G}_R}\) and \(\mathrm{Solv}_{\mathbb {G}_{\mathrm {TS}}}\) can be written as follows

where \(N_{\alpha \beta }=0\) if \(\alpha + \beta \notin \varDelta _{\mathrm {TS}}\).
5.3.2 Paint and Subpaint Groups in an Example
We now want to illustrate the general structure described in the previous subsection through the analysis of a specific example of a non maximally split symmetric space. This will be both educational in order to clarify the notion of Tits–Satake projection and instrumental to extract a general systematics for the paint and subpaint groups, which we will later recognize in the entire classification of supergravity relevant symmetric spaces.
Hence let us consider the following quaternionic Kähler manifold:
which, according to Table 5.1 is the c-map image of the following special Kähler manifold
The quaternionic nature of the chosen non maximally split symmetric space is signaled by the presence of the \(\mathrm {SU(2)}\) factor in the denominator group and it is confirmed by the decomposition of the adjoint representation of the numerator group:
Indeed the \(4\times 28 = 112\) coset generators being in the \((\mathbf {56},\mathbf {2})\) of \({\mathrm {E}_{7(-133)}\times \mathrm {SU(2)}}\) are \(\mathrm {SU(2)}\) doublets and transform symplectically under \(\mathrm {USp}(56)\) transformations due to the symplectic embedding of the \(\mathbf {56}\) representation of the compact \(\mathrm {E}_{7}\) group.
The quaternionic structure, however, is not relevant to our present discussion that focuses on the mechanisms of the Tits–Satake projection. By means of this latter we obtain the following result:
and we just note that the projected manifold is still quaternionic for similar reasons to those of (5.3.16). So the maximal non-compact Lie algebra \(\mathrm {F}_{4(4)}\) is the Tits–Satake subalgebra of \(\mathrm {E}_{8(-24)}\). Let us see how this happens, following step by step the scheme described in the previous section.
The rank of the complex \(\mathrm {E}_8\) algebra is 8 and, and in its real section \(\mathrm {E}_{8(-24)}\) we can distinguish 4 compact and 4 non-compact Cartan generators. In a Euclidean orthonormal basis the complete \(\mathrm {E}_{8}\) root system is composed of the following 240 roots:
and a convenient choice of the simple roots is provided by the following ones:
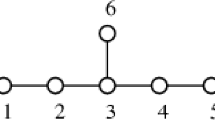
The corresponding Dynkin diagram is displayed in Fig. 5.2. where the roots \(\alpha _3 , \, \alpha _4 , \, \alpha _5 , \, \alpha _6\) have been marked in black. This indicates that these simple roots are imaginary, and Cartan generators as e.g. \(\alpha _3^i\mathscr {H}_i\) belong to \(\mathscr {H}^{\mathrm {comp}}\). In this way these diagrams define both the real form \(E_{8(-24)}\) and the corresponding Tits–Satake projection of the root system. The non-compact CSA \(\mathscr {H}^\mathrm{nc}\) is the orthogonal complement of \(\mathscr {H}^{\mathrm {comp}}\). Let us also note that the black roots form the Dynkin diagram of a \(D_4\) algebra, i.e in its compact form the Lie algebra of \(\mathrm {SO(8)}\). This is the origin of the paint group

The Tits–Satake diagram of \(E_{8(-24)}\), rank \(=\) 8, split rank \(=\) 4, \(\mathrm {G}_{\mathrm {TS}} = \mathrm {F}_{4(4)}\)
pertaining to this example. We shall identify it in a moment, but let us first perform the Tits–Satake projection on the root system. This case is particularly simple since the span of the simple imaginary roots \(\mathbf {\alpha }_{\varvec{3}},{\varvec{\alpha }}_{\varvec{4}},{\varvec{\alpha }}_{\varvec{5}},{\varvec{\alpha }}_{\varvec{6}}\) is just given by the Euclidean space along the orthonormal axes \(\varepsilon _4,\varepsilon _5\,\varepsilon _6,\varepsilon _7\). The Euclidean space along the orthonormal axes \(\varepsilon _1,\varepsilon _2\,\varepsilon _3,\varepsilon _8\) is the non-compact CSA. Note that this is not the same as the span of \({\varvec{\alpha }}_{\varvec{1}},{\varvec{\alpha }}_{\varvec{2}},{\varvec{\alpha }}_{\varvec{7}},{\varvec{\alpha }}_{\varvec{8}}\). Denoting the components of root vectors in the basis \(\varepsilon _i\) by \(\alpha ^i\), the splitting (2.4.19) is very simple. We just have:
and the projection (5.3.2) immediately yields the following restricted root system:
which can be recognized to be the root system of the simple complex algebra \(\mathrm {F}_{4}\).
With reference to the notations introduced in the previous section let us now identify the subsets \(\varDelta ^{\eta }\) and \(\varDelta ^\delta \) in the positive root subsystem of \(\varDelta ^+_{E_8} \) and their corresponding images in the projection, namely \(\varDelta _{\mathrm {TS}}^{\ell }\) and \(\varDelta _{\mathrm {TS}}^s\).
Altogether, performing the projection the following situation is observed:
-
There are 24 roots that have null projection on the non-compact space, namely
$$\begin{aligned} \alpha _\Vert = 0 \, \Leftrightarrow \, \alpha = \pm \varepsilon _i \pm \varepsilon _j \quad ; \quad i,j=4,5,6,7. \end{aligned}$$(5.3.23)These roots, together with the four compact Cartan generators, form the root system of a \(D_4\) algebra, whose dimension is exactly 28. In the chosen real form such a subalgebra of \(\mathrm {E}_{8(-24)}\) is the compact algebra \(\mathrm {SO(8)}\) and its exponential acts as the paint group, as already mentioned in (5.3.20). All the remaining roots have a non-vanishing projection on the compact space. In particular:
-
There are 12 positive roots of \(\mathrm {E}_8\) that are exactly projected on the 12 positive long roots of \(\mathrm {F}_4\), namely the first line of (5.3.22), which we therefore identify with \(\varDelta _{\mathrm {TS}}^\ell \). For these roots we have \(\alpha _\bot =0\) and they constitute the \(\varDelta ^\eta \) system mentioned above:
$$\begin{aligned} {\varDelta }^+_{E_8} \, \supset \, \varDelta _{\mathrm {TS}}^\eta = \left\{ \varepsilon _i \pm \varepsilon _j \right\} = \varDelta _{\mathrm {TS}}^\ell \quad ; \quad i <j \quad ; \quad \, i,j=1,2,3,8 \end{aligned}$$(5.3.24) -
There are 8 different positive roots of \(\mathrm {E}_8\) that have the same projection on each of the \(12=4 \oplus 8 \) positive short roots of \(\mathrm {F}_4\), i.e. the second and third line of (5.3.22). Namely the remaining \(12 \times 8=96\) roots of \(\mathrm {E}_8\) are all projected on short roots of \(\mathrm {F}_4\). The set of \(\mathrm {F}_4\) positive short roots can be split as follows:
$$\begin{aligned} \begin{array}{||lclc|r||} \hline \varDelta ^s_{\mathrm {TS}} &{} = &{} \varDelta ^s_{\mathrm {vec}} \, \bigcup \, \varDelta ^s_{\mathrm {spin}} \, \bigcup \, \varDelta ^s_{\overline{\mathrm {spin}}} &{} &{} \\ \varDelta ^s_{\mathrm {vec}} &{} = &{} \left\{ \varepsilon _i \right\} &{} i=1,2,3,8 &{} {\varvec{4}} \\ \varDelta ^s_{\mathrm {spin}} &{} = &{} \underbrace{\pm {\textstyle \frac{1}{2}} \varepsilon _1 \, \pm {\textstyle \frac{1}{2}} \varepsilon _2 \, \pm {\textstyle \frac{1}{2}} \varepsilon _3 \, +\, {\textstyle \frac{1}{2}} \varepsilon _8}_{\text {even number of minus signs}} &{}&{} {\varvec{4}} \\ \varDelta ^s_{\overline{\mathrm {spin}}} &{} = &{} \underbrace{\pm {\textstyle \frac{1}{2}} \varepsilon _1 \, \pm {\textstyle \frac{1}{2}} \varepsilon _2 \, \pm {\textstyle \frac{1}{2}} \varepsilon _3 \, +\, {\textstyle \frac{1}{2}} \varepsilon _8}_{\text {odd number of minus signs}} &{}&{} {\varvec{4}} \\ \hline &{} &{} &{} &{} {\varvec{12}} \\ \hline \hline \end{array} \end{aligned}$$(5.3.25)Correspondingly the subset \(\varDelta ^\delta \subset \varDelta _{E_8} \) defined by its projection property \(\varPi _{\mathrm {TS}} \left( \varDelta ^\delta \right) = \varDelta _{\mathrm {TS}}^s\) is also split in three subsets as follows:
$$\begin{aligned} \begin{array}{|lcl|c|r|} \hline \varDelta ^\delta _+ &{} = &{} \varDelta ^\delta _{\mathrm {vec}} \, \bigcup \, \varDelta ^\delta _{\mathrm {spin}} &{}&{} \\ \varDelta ^\delta _{\mathrm {vec}} &{} = &{} \left\{ \underbrace{\varepsilon _i}_{\alpha _\Vert } \oplus \underbrace{\left( \pm \varepsilon _j\right) }_{\alpha _\bot }\right\} \quad , \quad \left( \begin{array}{c} i=1,2,3,8 \\ j=4,5,6,7 \end{array}\right) &{} \mathrm {4} \times {\varvec{ 8}} &{} 32 \\ \varDelta ^\delta _{\mathrm {spin}} &{} = &{} \left\{ \underbrace{\left( \pm {\textstyle \frac{1}{2}} \varepsilon _1 \, \pm {\textstyle \frac{1}{2}} \varepsilon _2 \, \pm {\textstyle \frac{1}{2}} \varepsilon _3 \, +\, {\textstyle \frac{1}{2}} \varepsilon _8\right) }_{\alpha _\Vert \quad \text {even}\ \#\ \text {of}\ - \text {signs}} \, \oplus \, \underbrace{\left( \pm {\textstyle \frac{1}{2}} \varepsilon _4 \, \pm {\textstyle \frac{1}{2}} \varepsilon _5 \, \pm {\textstyle \frac{1}{2}} \varepsilon _6 \, \pm {\textstyle \frac{1}{2}} \varepsilon _7\right) }_{\alpha _\bot \quad \text {even}\ \#\ \text {of} -\ \text {signs}}\right\} &{} \mathrm {4} \times {\varvec{8}} &{} 32 \\ \varDelta ^\delta _{\overline{\mathrm {spin}}} &{} = &{} \left\{ \underbrace{\left( \pm {\textstyle \frac{1}{2}} \varepsilon _1 \, \pm {\textstyle \frac{1}{2}} \varepsilon _2 \, \pm {\textstyle \frac{1}{2}} \varepsilon _3 \, +\, {\textstyle \frac{1}{2}} \varepsilon _8\right) }_{\alpha _\Vert \quad \text {odd}\ \#\ \text {of}\ -\ \text {signs}} \, \oplus \, \underbrace{\left( \pm {\textstyle \frac{1}{2}} \varepsilon _4 \, \pm {\textstyle \frac{1}{2}} \varepsilon _5 \, \pm {\textstyle \frac{1}{2}} \varepsilon _6 \, \pm {\textstyle \frac{1}{2}} \varepsilon _7\right) }_{\alpha _\bot \quad \text {odd}\ \#\ \text {of}\ -}\right\} &{} \mathrm {4} \times {\varvec{8}} &{} 32 \\ \hline &{} &{} &{} &{} {\varvec{96}} \\ \hline \end{array} \end{aligned}$$(5.3.26)
We can now verify the general statements made in the previous sections about the paint group representations to which the various roots are assigned. First of all we see that, as we claimed, the long roots of \(\mathrm {F}_{4}\), namely those 12 given in (5.3.24) are singlets under the paint group \(\mathrm {G}_{\mathrm {paint}} = \mathrm {SO(8)}\). All other roots fall into multiplets with the same Tits–Satake projection and each of these latter has always the same multiplicity, in our case \(m=8\) (compare with (5.3.9)). So the short roots of \(\mathrm {F}_{4(4)}\) fall into 8-dimensional representations of \(\mathrm {G}_\mathrm{paint}=\mathrm {SO(8)}\). But which ones? \(\mathrm {SO(8)}\) has three kind of octets \({\varvec{8}}_\mathbf{v }\), \({\varvec{8}}_\mathbf{s }\) and \({\varvec{8}}_{\bar{\mathbf{s }}}\) and, as we stated, not every root \(\alpha _s\) of the Tits–Satake algebra \(\mathbb {G}_{\mathrm {TS}}\) falls in the same representation \(\mathbf {D}\) of the paint group although in this case all \(\mathbf {D}[\alpha ^s]\) have the same dimension. Looking back at our result we easily find the answer. The 4 positive roots in the subset \(\varDelta ^\delta _{\mathrm {vec}}\) have as compact part \(\alpha _\bot \) the weights of the vector representation of \(\mathrm {SO(8)}\). Hence the roots of \( \varDelta ^\delta _{\mathrm {vec}}\) are assigned to the \({\varvec{8}}_\mathbf{v }\) of the paint group. The 4 positive roots in \(\varDelta ^\delta _{\mathrm {spin}}\) have instead as compact part the weights of the spinor representation of \(\mathrm {SO(8)}\) and so they are assigned to the \({\varvec{8}}_\mathbf{s }\) irreducible representation. Finally, with a similar argument, we see that the 4 roots of \(\varDelta ^\delta _{\overline{\mathrm {spin}}}\) are in the conjugate spinor representation \({\varvec{8}}_{\bar{\mathbf{s }}}\). The last part of the general discussion of Sect. 5.3.1 is now easy to verify in the context of our example, namely that relevant to the subpaint group \(\mathrm {G}^0_{\mathrm {subpaint}}\) (we will omit sometimes the ‘subpaint’ indication for convenience). According to (5.3.10)–(5.3.11) we have to find a subgroup \(\mathrm {G}^0 \subset \mathrm {SO(8)}\) such that under reduction with respect to it, the three octet representations branch simultaneously as:
Such group \(\mathrm {G}^0\) exists and it is uniquely identified as the 14 dimensional \(\mathrm {G}_{2(-14)}\). Hence the subpaint group is \(\mathrm {G}_{2(-14)}\). Considering now (5.3.13) we see that the commutation relations of the solvable Lie algebra \(\mathrm{Solv}\left( \mathrm {E}_{8(-24)}/\mathrm {E}_{7(-133)}\times \mathrm {SU(2)} \right) \) precisely fall into the general form displayed in the first column of that table with the index \(x=1,\dots ,7\) spanning the fundamental 7-dimensional representation of \(\mathrm {G}_{2(-14)}\) and the invariant antisymmetric tensor \(a^{xyz}\) being given by the \(\mathrm {G}_{2(-14)}\)-invariant octonionic structure constants. Indeed the representation \(\mathbf {J}\) mentioned in Sect. 5.3.1 is the fundamental \(\mathbf {7}\) and we have the decomposition:
This shows that, as claimed in point [E] of the general discussion, the tensor product \(\mathbf {J}\times \mathbf {J}\) contains both the singlet and \(\mathbf {J}\).
In the example that is extensively discussed in [31], namely
the image of the Tits–Satake projection yields the same maximally split coset as in the case presently illustrated, although the original manifold is a different one. The only difference that distinguishes the two cases resides in the paint group. There we have \(\mathrm {G}_{\mathrm {paint}} = \mathrm {SO(3) \times SO(3) \times SO(3)}\) and the subpaint group is identified as \(\mathrm {G}^0_\mathrm{subpaint} =\mathrm {SO(3)}_{\mathrm{diag}}\). Correspondingly the index \(x=1,2,3\) spans the triplet representation of \(\mathrm {SO(3)}\) which is the \(\mathbf {J}\) appropriate to that case and the invariant tensor \(a^{xyz}\) is given by the Levi-Civita symbol \(\varepsilon ^{xyz}\).
Let us now consider the group theoretical meaning of the splitting of \(\mathrm {F}_{4(4)}\) roots into the three subsets \(\varDelta ^s_{\mathrm {vec}}\), \( \varDelta ^s_{\mathrm {spin}}\), \(\varDelta ^s_{\mathrm {TS},\overline{\mathrm {spin}}}\), which are assigned to different representations of the paint group \(\mathrm {SO(8)}\). This is easily understood if we recall that there exists a subalgebra \(\mathrm {SO(4,4)} \subset \mathrm {F}_{4(4)}\) with respect to which we have the following branching rule of the adjoint representation of \(\mathrm {F}_{4(4)}\):
The superscript nc is introduced just in order to recall that these are representations of the non-compact real form \(\mathrm {SO(4,4)}\) of the \(D_4\) Lie algebra. By \(\mathbf {28}\), \(\mathbf {8}_v\), \(\mathbf {8}_s\) and \(\mathbf {8}_{\bar{s}}\) we have already denoted and we continue to denote the homologous representations in the compact real form \(\mathrm {SO(8)}\) of the same Lie algebra. The algebra \(\mathrm {SO(4,4)}\) is regularly embedded and therefore its Cartan generators are the same as those of \(\mathrm {F}_{4(4)}\). The 12 positive long roots of \(\mathrm {F}_{4(4)}\) are the only positive roots of \(\mathrm {SO(4,4)}\), while the three sets \( \varDelta ^s_{\mathrm {vec}}\), \(\varDelta ^s_{\mathrm {spin}}\), \(\varDelta ^s_{\overline{\mathrm {spin}}}\) just correspond to the positive weights of the three representations \(\mathbf {8}_v^\mathrm{nc}\), \(\mathbf {8}_s^\mathrm{nc}\) and \(\mathbf {8}_{\bar{s}}^\mathrm{nc}\), respectively. This is in agreement with the branching rule (5.3.30). So the conclusion is that the different paint group representation assignments of the various root subspaces correspond to the decomposition of the Tits–Satake algebra \(\mathrm {F}_{4(4)}\) with respect to what we can call the sub Tits–Satake algebra \(\mathbb {G}_{\mathrm {subTS}} = \mathrm {SO(4,4)}\). We can just wonder how the concept of sub Tits–Satake algebra can be defined. This is very simple and obvious from our example. \(\mathrm {G}_{\mathrm {subTS}}\) is the normalizer of the paint group \(\mathrm {G}_{\mathrm {paint}}\) within the original group \(\mathrm {G}_\mathbb {R}\). Indeed there is a maximal subgroup:
with respect to which the adjoint of \(\mathrm {E}_{8(-24)}\) branches as follows:
and the last three terms in this decomposition display the pairing between representations of the paint group and representations of the sub Tits–Satake group. Alternatively we can view the subpaint group \(\mathrm {G}^0_{\mathrm {subpaint}} = \mathrm {G}_{2(-14)}\) as the normalizer of the Tits–Satake subgroup \(\mathrm {G}_{\mathrm {TS}} = \mathrm {F}_{4(4)}\) within the original group \(\mathrm {G}_\mathbb {R} = \mathrm {E}_{8(-24)}\). Indeed we have a subgroup
such that the adjoint of \(\mathrm {E}_{8(-24)}\) branches as follows:
The two decompositions (5.3.32) and (5.3.34) lead to the same decomposition with respect to the intersection group:
We find
The adjoint of the Tits–Satake subalgebra \(\mathrm {G}_{\mathrm {TS}} = \mathrm {F}_{4(4)}\) is reconstructed by collecting together all the singlets with respect to the subpaint group \(\mathrm {G}^0_\mathrm{subpaint}\). Alternatively the adjoint of the paint algebra \(\mathrm {G}_\mathrm{paint} =\mathrm {SO(8)}\) is reconstructed by collecting together all the singlets with respect to the sub Tits–Satake algebra \(\mathrm {G}_{\mathrm {subTS}} = \mathrm {SO(4,4)}\).
Finally, we can recognize the sub Tits–Satake algebra as the algebra generated by the CSA and roots \(\varDelta ^\ell \) (and their negatives) in the decomposition (5.3.4).
5.3.3 TS Projection for the Normed Solvable Algebras of Homogenous Special Manifolds
After our detailed discussion of the Tits–Satake projection in the above example of a specific symmetric space we can extract a general scheme that applies to all normal solvable Lie algebras. Let us discuss how the Tits–Satake projection can be reformulated relying on the paint and subpaint group structures. In Sect. 5.3.1 our starting point was the geometrical projection of the root system \(\varDelta _\mathbb {G}\) onto the non-compact Cartan subalgebra by setting, for each root \(\alpha \in \varDelta _\mathbb {G}\) its compact part \(\alpha _\bot \) to zero. This is the operation that is no longer available in the general case of a solvable algebra. We now only have the solvable algebra, which corresponds to the non-compact part \(\alpha _\Vert \). Indeed at the level of the solvable Lie algebra there is no notion of the compact Cartan generators. However, the structures that still persist and allow us to define the Tits–Satake projection are those of paint and subpaint groups. Indeed for all the solvable Lie algebras \(\mathrm{Solv}\left( {\mathscr {M}}\right) \) considered in the classification of homogeneous special geometries the following statements A-E are true:
[A1]
There exists a compact algebra \(\mathbb {G}_\mathrm{paint} \) which acts as an algebra of outer automorphisms (i.e. outer derivatives) of the solvable algebra \(\mathrm{Solv}\left( {\mathscr {M}}\right) \). The algebra \(\mathbb {G}_\mathrm{paint}\) is rigorously defined as follows. Given the solvable Lie algebra \(\mathrm{Solv}\left( {\mathscr {M}}\right) \) the corresponding Riemannian manifold \({\mathscr {M}}= \exp \left[ \mathrm{Solv}\left( {\mathscr {M}}\right) \right] \) has an algebra of isometries \(\mathbb {G}^\mathrm{iso}_{\mathscr {M}}\), which is normally larger than \(\mathrm{Solv}\left( {\mathscr {M}}\right) \), and for all special homogeneous manifolds \(\mathscr {M}\) such algebras were studied and completely classified in [4, 5]. Obviously \(\mathrm{Solv}\left( {\mathscr {M}}\right) \, \subset \, \mathbb {G}^\mathrm{iso}_{\mathscr {M}}\). Let us define the subalgebra of automorphisms of the solvable Lie algebra in the standard way:
By its own definition the algebra \(\mathrm {Aut} \, \left[ \mathrm{Solv}\left( {\mathscr {M}}\right) \right] \) contains \(\mathrm{Solv}\left( {\mathscr {M}}\right) \) as an ideal. Hence we can define the algebra of external automorphisms as the quotient:
and we identify \(\mathbb {G}_{\mathrm {paint}}\) as the maximal compact subalgebra of \(\mathrm {Aut}_{\mathrm {Ext}} \, \left[ \mathrm{Solv}\left( {\mathscr {M}}\right) \right] \). Actually we immediately see that
Indeed, as a consequence of its own definition the algebra \(\mathrm {Aut}_{\mathrm {Ext}} \, \left[ \mathrm{Solv}\left( {\mathscr {M}}\right) \right] \) is composed of isometries which belong to the stabilizer subalgebra \(\mathbb {H} \, \subset \, \mathbb {G}^\mathrm{iso}_{\mathscr {M}}\) of any point of the manifold, since \(\mathrm{Solv}\left( {\mathscr {M}}\right) \) acts transitively. In virtue of the Riemannian structure of \(\mathscr {M}\) we have \(\mathbb {H} \subset \mathfrak {so}(n) \) where \(n = \text {dim} \left( \mathrm{Solv}\left( {\mathscr {M}}\right) \right) \) and hence also \(\mathrm {Aut}_{\mathrm {Ext}} \, \left[ \mathrm{Solv}\left( {\mathscr {M}}\right) \right] \, \subset \, \mathfrak {so}(n)\) is a compact Lie algebra.
[A2]
We can now reformulate the notion of maximally non-compact or maximally split algebras in such a way that it applies to the case of all considered solvable algebras, independently whether they come from symmetric spaces or not. The algebra \(\mathrm{Solv}\left( {\mathscr {M}}\right) \) is maximally split if the paint algebra is trivial, namely:
For maximally split algebras there is no Tits–Satake projection, namely the Tits–Satake subalgebra is the full algebra.
[B]
Let us now consider non maximally split algebras such that \(\mathrm {Aut}_{\mathrm {Ext}} \, \left[ \mathrm{Solv}\left( {\mathscr {M}}\right) \right] \ne \emptyset \). Let r be the rank of \(\mathrm{Solv}\left( {\mathscr {M}}\right) ,\) namely the number of its Cartan generators \(H_i\) and n the number of its nilpotent generators \(\mathscr {W}_\alpha \), namely the number of generalized roots \(\mathbf {\alpha }\). The whole set of Cartan generators \(H_i\), plus a subset of p nilpotent generators \(\mathscr {W}_{\alpha ^\ell } \) associated with roots \(\mathbf {\alpha }^\ell \) that we name long, close a solvable subalgebra \(\mathrm{Solv}_{\mathrm {subTS}} \subset \mathrm{Solv}\left( {\mathscr {M}}\right) \) that is made of singlets under the action of the paint Lie algebra \(\mathbb {G}_\mathrm{paint}\), i.e.
We name \(\mathrm{Solv}_{\mathrm {subTS}}\) the sub Tits–Satake algebra. By definition \(\mathrm{Solv}_{\mathrm {subTS}}\) has the same rank as the original solvable algebra \(\mathrm{Solv}\left( {\mathscr {M}}\right) \). In all possible cases, it is the solvable Lie algebra of a symmetric maximally split coset \(\mathbb {G}_{\mathrm {subTS}}/\mathbb {H}_{\mathrm {subTS}}\). In this way, eventually, we have the notion of a semisimple Lie algebra \(\mathbb {G}_{\mathrm {subTS}}\).
[C1]
Considering the orthogonal decomposition of the original solvable Lie algebra with respect to its sub Tits–Satake algebra:
we find that the orthogonal subspace \(\mathbb {K}_\mathrm{short}\) necessarily decomposes into a sum of q subspaces:
where each \(\mathbb {D}\left[ \mathscr {P}^+_\wp ,\mathbf {Q}_\wp \right] \) is the tensor product:
of an irreducible module \(\mathbf {Q}_\wp \) (i.e. representation) of the compact paint algebra \(\mathbb {G}_{\mathrm {paint}}\) with an irreducible module \(\mathscr {P}^+_\wp \) of the solvable sub Tits–Satake algebra \(\mathrm{Solv}_{\mathrm {subTS}}\). As we already noticed, \(\mathrm{Solv}_{\mathrm {subTS}}\) is the maximal Borel subalgebra of the maximally split, semisimple, real Lie algebra \(\mathbb {G}_{\mathrm {subTS}}\). Hence an irreducible module \(\mathscr {P}^+_\wp \) of \(\mathrm{Solv}_{\mathrm {subTS}}\) necessarily decomposes in the following way:
where each \(\mathbb {W}[\mathbf {\alpha }^{(\wp ,s)}]\) is an eigenspace of the CSA of \(\mathbb {G}_{\mathrm {subTS}}\), which coincides with that of \(\mathrm{Solv}_{\mathrm {subTS}}\) and eventually with the \(\mathrm {CSA}\) of the original \(\mathrm{Solv}\left( {\mathscr {M}}\right) \). Explicitly this means:
Furthermore the r-vectors of eigenvalues, which are roots of \(\mathrm{Solv}\left( {\mathscr {M}}\right) \), are identified by (5.3.45) as the non negative weights of some irreducible module \(\mathscr {P}_\wp \) of the simple Lie algebra \(\mathbb {G}_{\mathrm {subTS}}\):
Indeed for the solvable Lie algebras \(\mathrm{Solv}(\mathrm {G/H})\) of maximally split cosets the irreducible modules are easily constructed as half-modules of the full algebra \(\mathbb {G}\), namely by taking the eigenspaces associated with non negative weights.
[C2]
The decomposition of \(\mathbb {K}_\mathrm{short}\) mentioned in (5.3.43) has actually a general form depending on the rank. We will discuss this here for the quaternionic-Kähler manifolds.
- (r \(=\) 4):
-
In this case there are just three modules of \(\mathbb {G}_{\mathrm {subTS}} = \mathrm {SO(4,4)}\) involved in the sum of (5.3.43) namely \(\mathscr {P}_{\mathbf {8}_\mathbf{v }}\), \(\mathscr {P}_{\mathbf {8}_\mathbf{s }}\), \(\mathscr {P}_{\mathbf {8}_{\bar{\mathbf{s }}}}\), where \(\mathbf {8}_{\mathbf{v,s, }{\bar{\mathbf{s }}}}\) denotes the vector, spinor and conjugate spinor representation, respectively. All these three modules are 8 dimensional, which means that for all of them there are 4 positive weights and 4 negative ones. Denoting these half spaces by \(\mathbf {4}^+_{\mathbf{v,s, }{\bar{\mathbf{s }}}}\), we can write:
$$\begin{aligned} \mathbb {K}_\mathrm{short} = \left( \mathbf {4}^+_\mathbf{v }, \mathbf {Q}_\mathbf{v } \right) \oplus \left( \mathbf {4}^+_\mathbf{s }, \mathbf {Q}_\mathbf{s } \right) \oplus \left( \mathbf {4}^+_{\bar{\mathbf{s }}}, \mathbf {Q}_{\bar{\mathbf{s }}} \right) , \end{aligned}$$(5.3.48)where \(\mathbf {Q}_{\mathbf{v,s, }{\bar{\mathbf{s }}}}\) are three different irreducible modules of \(\mathbb {G}_{\mathrm {paint}}\) that we will discuss in later sections. The generic case is that where all three representations \(\mathbf {Q}_{\mathbf{v,s, }{\bar{\mathbf{s }}}}\) are non vanishing. Special cases where two of the three representations \(\mathbb {G}_{\mathrm {paint}}\) vanish do also exist. The limiting case is that where all three representations are deleted and the full algebra is just \(\mathrm{Solv}\left( \mathrm {\frac{\mathrm {SO(4,4)}}{\mathrm {SO(4)} \times \mathrm {SO(4)}}}\right) \). Note that (5.3.48) is the generalization of the decomposition (5.3.32) applying to the case analyzed in detail above. There we have \(\mathbb {G}_\mathrm{paint} =\mathrm {SO(8)}\) and the aforementioned irreducible modules are:
$$\begin{aligned} \mathbf{Q }_\mathbf{{v} } =\mathbf {8}_\mathbf{v } \quad ; \quad \mathbf{Q }_\mathbf{{s} } = {\varvec{8}}_\mathbf{s } \quad ; \quad \mathbf {Q}_{{\bar{\mathbf{s }}}} = \mathbf {8}_{\bar{\mathbf{s }}} \end{aligned}$$(5.3.49) - (r \(=\) 3):
-
In this case there is only one module of \(\mathbb {G}_{\mathrm {subTS}} = \mathrm {SO(3,4)}\) involved in the sum of (5.3.43) namely \(\mathscr {P}_{\mathbf {8}_\mathbf{s }}\) where \(\mathbf {8}_{\mathbf{s }}\) denotes the 8 dimensional spinor representation of \(\mathrm {SO(3,4})\). With a notation completely analogous to that employed above let \(4^+_\mathrm {s}\) denote the space spanned by the eigenspaces pertaining to positive spinor weights. Then we can write:
$$\begin{aligned} \mathbb {K}_\mathrm{short} = \left( {\varvec{4}}^+_\mathbf{s }, \mathbf{Q }_\mathbf{s } \right) , \end{aligned}$$(5.3.50) - (r \(=\) 2):
-
In this case, there is one exceptional case, namely \(\mathrm {SG}_5\), where \(G_R=G_{\mathrm {subTS}}=G_{2(2)}\). In all other cases, there are two modules of \(\mathrm {SO(2,2)}\) involved in the sum of (5.3.43) and these are the spinor module \(\mathscr {P}_{{\varvec{4}}_\mathbf{s }}\) and the vector module \(\mathscr {P}_{{\varvec{4}}_\mathbf{v }}\). Both modules are 4-dimensional and in our adopted notations we can write:
$$\begin{aligned} \mathbb {K}_\mathrm{short} = \left( {\varvec{2}}^+_\mathbf{s }, \mathbf {Q}_\mathbf{s } \right) \oplus \left( \mathbf {2}^+_\mathbf{v }, \mathbf {Q}_\mathbf{v } \right) \,. \end{aligned}$$(5.3.51) - (r \(=\) 1):
-
In this case we have to distinguish between \(G_{\mathrm {subTS}} = \mathrm {SO(1,1)}\) or \(G_{\mathrm {subTS}} = \mathrm {SU(1,1)}\). When \(G_{\mathrm {subTS}} = \mathrm {SU(1,1)}\) we have:
$$\begin{aligned} \mathbb {K}_\mathrm{short} = \left( {\varvec{1}}^+_\mathbf{s }, \mathbf {Q_s} \right) , \end{aligned}$$(5.3.52)where \({\varvec{1}}^+_\mathbf{s }\) denotes the positive weight subspace of the spinor representation of \(\mathfrak {so}(1,2)\), i.e. the fundamental of \(\mathfrak {su}(1,1)\), which is two-dimensional. The representation \(\mathbf{Q }_\mathbf{s }\) will be discussed later. When \(G_{\mathrm {subTS}} = \mathrm {SO(1,1)}\) on the other hand, we have:
$$\begin{aligned} \mathbb {K}_\mathrm{short} = \left( {\varvec{1}}^+_\mathbf{s }, \mathbf{Q }_\mathbf{s } \right) \oplus \left( {\varvec{1}}^+_\mathbf{v }, \mathbf{Q }_\mathbf{v } \right) \,. \end{aligned}$$(5.3.53)In this case, \({\varvec{1}}^+_\mathbf{s }\) denotes a subspace of weight 1 / 2 with respect to \(\mathbb {G}_{\mathrm {subTS}} = \mathfrak {so}(1,1)\), while the subspace \({\varvec{1}}^+_\mathbf{v }\) has weight 1.
We can now note a regularity in the decomposition of \(\mathbb {K}_\mathrm{short}\). For all values of the rank we always have the space \((\mathscr {S}^+,\mathbf{Q }_\mathbf{s })\) that associates a representation of the paint group to the half spinor representation of the sub Tits–Satake algebra. In the case of rank \(r=4\) in addition to this we also have the representations \(\mathbf{Q }_\mathbf{v }\) and \(\mathbf{Q }_{\bar{\mathbf{s }}}\), which we associate to what we can name the \(\mathscr {V}^+\) and \(\bar{\mathscr {S}}^+\) half modules. We have established a notation covering all the cases which enables us to proceed to the next point and give a general definition of the Tits–Satake projection.
[D]
The paint algebra \(\mathbb {G}_\mathrm{paint}\) contains a subalgebra
such that with respect to \(\mathbb {G}^0_{\mathrm {subpaint}}\), each of the three irreducible representations \(\mathbf {Q}_{\mathbf{v,s, }{\bar{\mathbf{s }}}}\) branches as:
where the representation \(\mathbf{J }_{\mathbf{v,s, }{\bar{\mathbf{s }}}}\) is in general reducible.
[E]
The restriction to the singlets of \(\mathbb {G}^0_{\mathrm {subpaint}}\) defines a Lie subalgebra of \(\mathrm{Solv}_\mathrm {M}\), namely, if we set:
we get:
Relying on all the above properties and structures described in points [A], [B], [C], [D] and [E], which turn out to hold true for every \(\mathrm{Solv}\left( {\mathscr {M}}\right) \) considered in supergravity, irrespectively whether it is associated with a symmetric space or not, we can define the Tits–Satake projection at the level of solvable algebras by stating:
In other words, we define the Tits–Satake solvable subalgebra \(\mathrm{Solv}_{\mathrm {TS}}\) as spanned by all the singlets under the subpaint group \(\mathrm {G}_\mathrm{subpaint}\). By its very definition the Tits–Satake subalgebra contains the sub Tits–Satake algebra \(\mathrm{Solv}_{\mathrm {subTS}} \, \subset \, \mathrm{Solv}_{\mathrm {TS}}\) which is made of singlets with respect to the full paint group \(\mathrm {G}_\mathrm{paint}\) The subtle points in the above definition of the Tits–Satake projection is given by point [D] and [E]. Namely it is a matter of fact, which is not obvious a priori, that the addition of the three modules (occasionally vanishing) \(\mathscr {V}^+, \mathscr {S}^+, \overline{\mathscr {S}}^+\) to the sub Tits–Satake algebra \(\mathrm{Solv}_{\mathrm {subTS}}\) always defines a new Lie algebra. Being true this implies that a subalgebra \(\mathrm{Solv}_{\mathrm {TS}}\) with the structure (5.3.56) exists in \(\mathrm{Solv}_{Q}\) and \(\mathbb {G}_{\mathrm {subpaint}}\) is its stability subalgebra. Vice versa, the existence of a subpaint algebra such that the decomposition (5.3.55) is true, implies that the subspace (5.3.56) closes a subalgebra since the kernel of a subalgebra of automorphisms is necessarily a closed subalgebra.
5.4 The Systematics of Paint Groups
As we explained in Sect. 5.3.3, the Tits–Satake projection originally defined in terms of a geometrical projection of the root space, can be generalized to all solvable algebras of special geometries reformulating it in terms of the paint and subpaint group structures. The systematic procedure outlined there, started as step A] with the identification of the paint group. This is what we do now, unveiling a very elegant pattern of such paint groups.
As we claimed in the introduction, the specially fascinating property of the paint group is that it is invariant under both the \(\mathbf {c}\)-map and the \(\mathbf {c}^\star \)-map, namely under dimensional reduction.
5.4.1 The Paint Group for Non-compact Symmetric Spaces
In Sect. 5.3.3, we defined the paint group as the group of external automorphisms of the solvable algebra associated with a certain homogeneous space (5.3.39). For non-compact symmetric spaces there exists another, more common, definition of the paint group. Referring to the presentation in the beginning of Sect. 5.3.1, the paint group is defined as a subgroup of \(\mathbb {H}\), whose Cartan generators are those in \(\mathscr {H}^\mathrm{comp}\) and the roots are those in \(\varDelta _{\mathrm {comp}}\) (and their negatives), i.e. those that have no component \(\alpha _{||}\) in the decomposition (2.4.19).
As we mentioned already in the example in Sect. 5.3.2, a real form \({\mathbb {G}}_\mathbb {R}\) of the Lie algebra \(\mathbb {G}\) is represented by the so-called Satake diagrams, which are Dynkin diagrams with the following extra decorations:
-
Compact simple roots (those in \(\varDelta _{\mathrm {comp}}\)) are denoted by filled circles.
-
Simple roots that, upon setting \(\alpha _\bot =0\), project to the same restricted root are connected with a two-sided arrow. These are simple roots that necessarily belong to \(\varDelta ^\delta \).
Given the Satake diagram the paint group can then be read from it in the following way. The black dots form a Dynkin diagram of the semi-simple type. The paint group then contains a factor corresponding to this painted subdiagram. This corresponds to the roots in \(\varDelta _{\mathrm {comp}}\) and the elements of \(\mathscr {H}^\mathrm{comp}\) for which these roots have non-vanishing components. Furthermore, for every arrow, there is one additional \(\mathrm {SO}(2)\)-factor that commutes with the rest of the paint group. These correspond to the additional generators in \(\mathscr {H}^\mathrm{comp}\). An example of this is given in Figs. 5.2 and 5.3. For the symmetric quaternionic spaces of rank 4, the paint groups are summarized in Table 5.3. The case 4 has already been extensively discussed. Here we can briefly explain the group theory of the case 2. It suffices to note that the \(\mathrm {E}_{6(2)}\) Lie algebra contains \(\mathrm {F}_{4(4)}\) as a maximal subalgebra and that the adjoint has the following branching rule:
This shows that the subpaint group is empty since the normalizer of the Tits–Satake subalgebra \(\mathrm {F}_{4(4)}\) is null. On the other hand, recalling the decomposition of the fundamental representation of \(\mathrm {F}_{4(4)}\) with respect to the subalgebra \(\mathrm {SO(4,4)}\)
together with the branching rule of the adjoint given in (5.3.30), we conclude that under the subgroup \(\mathrm {SO(4,4) \times \mathrm {SO}(2)^2}\) we have:
which shows that the paint group is indeed \(\mathrm {SO(2)^2}\) as claimed.

Satake diagram of \(E_{6(2)}\). The paint group can be seen to be \(\mathrm {SO(2)}^2\)
From (5.4.3) we also read off the representations \(\mathbf {Q}_{\mathbf{v,s, }{\hat{\mathbf{s }}}}\) defined by (5.3.48) that pertain to this case:

5.5 Classification of the Sugra-Relevant Symmetric Spaces and Their General Properties
Equipped with the powerful weapon of the Tits Satake projection which allows to organize them into universality classes, we can now make a complete survey of the symmetric spaces \(\mathrm {G/H}\) that are relevant to supergravity theories and in particular to the construction of black-hole solutions. Indeed, as the reader cannot fail to appreciate there is a general group-theoretical framework underlying the construction of supergravity black holes which allows both for
-
(1)
a classification of the relevant symmetric spaces,
-
(2)
a general description of their structures which are relevant to the black hole solutions.
The presentation of both items in the above list is the goal of the present section. To achieve such a goal we need to emphasize a few general aspects of the decomposition (1.7.12) that relate to the underlying root systems and Dynkin diagrams. In the following we heavily rely on results presented several years ago in [46]. Indeed from the algebraic view-point a crucial property of the general decomposition in Eq. (1.7.12) is encoded into the following statements which are true for all the casesFootnote 1:
-
1.
The \(A_1\) root-system associated with the \({\mathfrak {sl}(2,\mathbb {R})_E}\) algebra in the decomposition (1.7.12) is made of \(\pm \, \psi \) where \(\psi \) is the highest root of \(\mathbb {U}_{D=3}\).
-
2.
Out of the r simple roots \(\alpha _i\) of \(\mathbb {U}_{D=3}\) there are \(r-1\) that have grading zero with respect to \(\psi \) and just one \(\alpha _{W}\) that has grading 1:
$$\begin{aligned} \left( \psi \, ,\, \alpha _i\right)= & {} 0 \quad \quad i \ne W \nonumber \\ \left( \psi \, ,\, \alpha _W\right)= & {} 1 \end{aligned}$$(5.5.1) -
3.
The only simple root \(\alpha _W\) that has non vanishing grading with respect \(\psi \) is just the highest weight of the symplectic representation \(\mathbf {W}\) of \(\mathbb {U}_{D=4}\) to which the vector fields are assigned.
-
4.
The Dynkin diagram of \(\mathbb {U}_{D=4}\) is obtained from that of \(\mathbb {U}_{D=3}\) by removing the dot corresponding to the special root \(\alpha _W\).
-
5.
Hence we can arrange a basis for the simple roots of the rank r algebra \(\mathbb {U}_{D=3}\) such that:
$$\begin{aligned} \begin{array}{rcl} \alpha _i &{} = &{} \left\{ \overline{\alpha }_i , 0 \right\} \quad ; \quad i \ne W\\ \alpha _W &{} = &{} \left\{ \overline{\mathbf {w}}_h , \frac{1}{\sqrt{2}} \right\} \\ \psi &{} = &{} \left\{ \mathbf {0} , {\sqrt{2}} \right\} \ \end{array} \end{aligned}$$(5.5.2)where \(\overline{\alpha }_i\) are \((r-1)\)-component vectors representing a basis of simple roots for the Lie algebra \(\mathbb {U}_{D=4}\), \(\overline{\mathbf {w}}_h\) is also an \((r-1)\)-vector representing the highest weight of the representation \(\mathbf {W}\).
This means that the entire root system and the Cartan subalgebra of the \(\mathbb {U}_{D=3}\) Lie algebra can be organized as follows:
This organization of the Lie algebra is very important, as it was thoroughly discussed in [46], for the systematics of the Kač Moody extension which occurs when stepping down from D \(=\) 3 to D \(=\) 2 dimensions, but it is equally important in the present context to analyze the structure of the \(\mathrm {H}^\star \)-subalgebra and the Tits Satake projection.
5.5.1 Tits Satake Projection
In most cases of lower supersymmetry, neither the algebra \(\mathbb {U}_{D=4}\) nor the algebra \(\mathbb {U}_{D=3}\) are maximally split. In short this means that the non-compact rank \(r_{nc} < r \) is less than the rank of \(\mathbb {U}\), namely not all the Cartan generators are non-compact. When this happens it means that the structure of black hole solutions is effectively determined by the maximally split Tits Satake subalgebra \(\mathbb {U}^{TS} \subset \mathbb {U}\), whose rank is equal to \(r_{nc}\). Effectively determined does not mean that solutions of the big system coincide with those of the smaller system rather it means that the former can be obtained from the latter by means of rotations of the paint group, \(\mathrm {G}_{\mathrm{paint}}\). As we have seen the Tits Satake algebra is obtained from the original algebra via a projection of the root system of \(\mathbb {U}\) onto the subspace orthogonal to the compact part of the Cartan subalgebra of \(\mathbb {U}^{TS}\):
In Euclidean geometry \(\overline{\varDelta }_{\mathbb {U}^{TS}}\) is just a collection of vectors in \(r_{nc}\) dimensions; a priori there is no reason why it should be the root system of another Lie algebra. Yet as we illustrated, in most cases, \(\overline{\varDelta }_{\mathbb {U}^{TS}}\) turns out to be a Lie algebra root system and the maximal split Lie algebra corresponding to it, \(\mathbb {U}^{TS}\), is, the Tits Satake subalgebra of the original non maximally split Lie algebra: \(\mathbb {U}^{TS} \subset \mathbb {U}\). Such algebras \(\mathbb {U}\) are called non-exotic. The exotic non compact algebras are those for which the system \(\overline{\varDelta }_{\mathbb {U}^{TS}}\) is not an admissible root system. In such cases there is no Tits Satake subalgebra \(\mathbb {U}^{TS}\). Exotic algebras are very few and in supergravity they appear only in three instances that display additional pathologies relevant also for the black hole solutions. For the non exotic models we have that the decomposition (1.7.12) commutes with the projection, namely:
In other words the projection leaves the \(A_1\) Ehlers subalgebra untouched and has a non trivial effect only on the duality algebra \(\mathbb {U}_{D=4}\). Furthermore the image under the projection of the highest root of \(\mathbb {U}\) is the highest root of \(\mathbb {U}^{TS}\):
The reason why the Tits Satake projection is relevant to us was first pointed out in [45] where the present author and his collaborators advocated that the classification of nilpotent orbits and hence of extremal black hole solutions depends only on the Tits Satake subalgebra and therefore is universal for all members of the same Tits Satake universality class. By this name we mean all algebras who share the same Tits Satake projection.
Having clarified these points we can proceed to present the classification of homogeneous symmetric spaces relevant to supergravity models and to black hole solutions.
5.5.2 Classification of the Sugra-Relevant Symmetric Spaces
The classification of the symmetric coset based supergravity models is exhaustive and it is presented in Tables 5.4 and 5.5. There are 16 universality classes of non-exotic models and 3 exceptional instances of exotic models which appear in the second table.
In the tables we have also listed the Paint groups and the subpaint groups. These latter are always compact and their different structures is what distinguishes the different elements belonging to the same class. As it was shown in [32] and extensively illustrated in the previous sections, these groups are dimensional reduction invariant, namely they are the same in \(D=4\) and in \(D=3\). Hence the representation \(\mathbf {W}\), which in particular contains the electromagnetic charges of the hole, can be decomposed with respect to the Tits Satake subalgebra and the Paint group revealing a regularity structure inside each Tits Satake universality class which is at the heart of the classification of charge orbits. The same decomposition can be given also for the \(\mathbb {K}^\star \) representation and this is at the heart of the classification of black holes according to nilpotent orbits.
Focusing on the non-exotic models, we note that the 16 classes have a quite different type of population. There are six one element classes whose single member is maximally split. They are the following ones and all have a distinguished standpoint within the panorama of supergravity theories:
-
1.
The \(\mathscr {N}=8\) supergravity theory, which is the maximal one in \(D=4\), (model 1).
-
2.
The \(\mathscr {N}=2\) supergravity theory with a single vector multiplet and non-vanishing Yukawa coupling(model 2).
-
3.
The \(\mathscr {N}=4\) supergravity theory with 5 vector multiplets (model 11).
-
4.
The \(\mathscr {N}=4\) supergravity theory with 6 vector multiplets which is obtained compactifying a type II theory on a \(\mathrm {T}^6/\mathbb {Z}_2\) orbifold (model 12).
-
5.
The \(\mathscr {N}=2\) theory with two vector multiplets and non vanishing Yukava couplings, usually called the st-model (model 14).
-
6.
The \(\mathscr {N}=2\) theory with three vector multiplets and non vanishing Yukava couplings, usually called the stu-model (model 15).
Next we have two universality classes, each containing an infinite number of elements. They are
-
1.
The \(\mathscr {N}=4\) supergravity theory with \(n=6+p\) vector multiplets (\(p\ge 1\)), (model 13).
-
2.
The \(\mathscr {N}=2\) supergravity theory with \(n=3+p\) vector multiplets (\(p\ge 1\)) and non vanishing Yukawa couplings (model 16).
We still have the very interesting 4-element universality class whose maximally split representative corresponds to the maximally split special Kähler manifold \(\frac{\mathrm {Sp(6,\mathbb {R})}}{\mathrm {SU(3)\times U(1)}}\). This class contains the models 3, 4, 5, 6 distinguished by quite peculiar Paint groups. We will thoroughly analyze the structure of this class.
Finally we have the three exotic models whose common feature is that their group and subgroup all belong to the pseudo-unitary series \(\mathrm {SU(p,q)}\). The general decomposition (1.7.12) still holds true, but the Tits Satake projection looses its significance.
5.5.3 Dynkin Diagram Analysis of the Principal Models
Next we analyze the form of the root systems of the \(\mathbb {U}_{\mathrm {D=3}}\) algebras in relation with the decomposition (1.7.12).
\(\mathscr {N}=8\)
This is the case of maximal supersymmetry and it is illustrated by Fig. 5.4.
In this case all the involved Lie algebras are maximally split and we have
The highest root of \(\mathrm {E_{8(8)}}\) is
and the unique simple root not orthogonal to \(\psi \) is \(\alpha _8 = \alpha _W\), according to the labeling of roots as in Fig. 5.4. This root is the highest weight of the fundamental \(\mathbf {56}\)-representation of \(E_{7(7)}\).

The Dynkin diagram of \(E_{8(8)}\). The only simple root which has grading one with respect to the highest root \(\psi \) is \(\alpha _8\) (painted with three circles). With respect to the algebra \(\mathbb {U}_{D=4}=E_{7(7)}\) whose Dynkin diagram is obtained by removal of the multiple circle, \(\alpha _8\) is the highest weight of the symplectic representation of the vector fields, namely \(\mathbf {W}=\mathbf {56}\)
The well adapted basis of simple \(E_{8}\) roots is constructed as follows:
In this basis we recognize that the seven 7-vectors \(\bar{\alpha }_i\) constitute a simple root basis for the \(E_7\) root system, while:
is the highest weight of the fundamental \(\mathbf {56}\) dimensional representation. Finally in this basis the highest root \(\psi \) defined by Eq. (5.5.8) takes the expected form:
\(\mathscr {N}=6\)
In this case the \(D=4\) duality algebra is \(\mathbb {U}_{D=4}=\mathrm {SO}^\star (12)\), whose maximal compact subgroup is \(\mathrm {H=SU(6) \times U(1)}\). The scalar manifold (Fig. 5.5):
is an instance of special Kähler manifold which can also be utilized in an \(\mathscr {N}=2\) supergravity context. The \(D=3\) algebra is \(\mathbb {U}_{D=3}=E_{7(-5)}\). The 16 vector fields of \(D=4~\mathscr {N}=6\) supergravity with their electric and magnetic field strengths fill the spinor representation \(\mathbf {32}_s\) of \(\mathrm {SO}^\star (12)\), so that the decomposition (1.7.12), in this case becomes:

The Dynkin diagram of \(E_{7(-5)}\). The only simple root which has grading one with respect to the highest root \(\psi \) is \(\alpha _7\) (painted with multiple circles). With respect to the algebra \(\mathbb {U}_{D=4}=\mathrm {SO}^\star (12)\) whose Dynkin diagram is obtained by removal of the multiple circle, \(\alpha _7\) is the highest weight of the symplectic representation of the vector fields, namely the \(\mathbf {W}=\mathbf {32}_s\)
The simple root \(\alpha _W\) is \(\alpha _7\) and the highest root is:
A well adapted basis of simple \(E_{7}\) roots can be written as follows:
In this basis we recognize that the six 6-vectors \(\bar{\alpha }_i\) (\(i=1,\dots ,6\)) constitute a simple root basis for the \(D_6\simeq \mathrm {SO}^\star (12)\) root system, while:
is the highest weight of the spinor \(\mathbf {32}\)-dimensional representation of \(\mathrm {SO}^\star (12)\). Finally in this basis the highest root \(\psi \) defined by Eq. (5.5.14) takes the expected form:
In this case, as in most cases of lower supersymmetry, neither the algebra \(\mathbb {U}_{D=4}\) nor the algebra \(\mathbb {U}_{D=3}\) are maximally split. The Tits Satake projection of \(\mathrm {E_{7(-5)}}\) is \(\mathrm {F_{4(4)}}\) and the explicit form of Eq. (5.5.5) is the following one:
The representation \(\mathbf {14}^\prime \) of \(\mathrm {Sp(6,\mathbb {R})}\) is that of an antisymmetric symplectic traceless tensor:

The Dynkin diagram of the Tits Satake subalgebra \(\mathfrak {f}_{4(4)}\) is discussed in Fig. 5.6.

The Dynkin diagram of \(F_{4(4)}\). The only root which is not orthogonal to the highest root is \(\varpi _V = \varpi _1\). In the Tits Satake projection \(\varPi ^{TS}\) the highest root \(\psi \) of \(F_{4(4)}\) is the image of the highest root of \(E_{7(-5)}\) and the root \(\varpi _V = \varpi _1 = \varPi ^{TS} \left( \alpha _7\right) \) is the image of the root associated with the vector fields
\(\mathscr {N}=5\)
The case of \(\mathscr {N}=5\) supergravity is described by Fig. 5.7 and it is one of the three exotic models whose Tits–Satake projection does not produce a Lie algebra root system.
In the \(\mathscr {N}=5\) theory the scalar manifold is a complex coset of rank \(r=1\),
and there are \(\mathbf {10}\) vector fields whose electric and magnetic field strengths are assigned to the \(\mathbf {20}\)-dimensional representation of \(\mathrm {SU(1,5)}\), which is that of an antisymmetric three-index tensor

The decomposition (1.7.12) takes the explicit form:
and we have that the highest root of \(\mathrm {E_6}\), namely
has non vanishing scalar product only with the root \(\alpha _4\) in the form depicted in Fig. 5.7.

The Dynkin diagram of \(E_{6(-14)}\). The only simple root which has grading one with respect to the highest root \(\psi \) is \(\alpha _4\) (painted with multiple circles). With respect to the algebra \(\mathbb {U}_{D=4}=\mathrm {SU(5,1))}\) whose Dynkin diagram is obtained by removal of the black circle, \(\alpha _4\) is the highest weight of the symplectic representation of the vector fields, namely the \(\mathbf {W}=\mathbf {20}\)
Writing a well adapted basis of \(E_6\) roots is a little bit more laborious but it can be done. We find:
In this basis we can check that the five 5-vectors \(\bar{\alpha }_i\) (\(i=1,\dots ,5\)) constitute a simple root basis for the \(A_5\simeq \mathrm {SU(1,5)}\) root system, namely:
while:
is the highest weight of the \(\mathbf {20}\)-dimensional representation of \(\mathrm {SU(1,5)}\). Finally in this basis the highest root \(\psi \) defined by Eq. (5.5.23) takes the expected form:
\(\mathscr {N}=4\)
The case of \(\mathscr {N}=4\) supergravity is the first where the scalar manifold is not completely fixed, since we can choose the number \(n_m\) of vector multiplets that we can couple to the graviton multiplet. In any case, once \(n_m\) is fixed the scalar manifold is also fixed and we have:
The total number of vectors \(n_{\mathrm {v}} = 6+n_m\) is also fixed and the symplectic representation \(\mathbf {W}\) of the duality algebra
to which the vectors are assigned and which determines the embedding:
is also fixed, namely \(\mathbf {W} = \left( {\varvec{2}}_{\varvec{0}}\mathbf{,6+n }_\mathbf{m } \right) \), \({\varvec{2}}_{\varvec{0}}\) being the fundamental representation of \(\mathrm {SL(2,\mathbb {R})_0}\) and \(\mathbf{6+n }_\mathbf{m }\) the fundamental vector representation of \({\mathrm {SO(6,n}}_\mathrm{m)}\).

The Dynkin diagram of \(D_{4+k+1}\). The algebra \(D_{4+k+1}\) is that of the group \(\mathrm {SO(8,2k+2)}\) corresponding to the \(\sigma \)-model reduction of \(\mathscr {N}=4\) supergravity coupled to \(n_m=2k\) vector multiplets. The only simple root which has non vanishing grading with respect to the highest one \(\psi \) is \(\alpha _2\). Removing it (black circle) we are left with the algebra \(D_{4+k-1} \oplus A_1\) which is indeed the duality algebra in \(D=4\), namely \(\mathrm {SO(6,2k)} \oplus \mathrm {SL(2,\mathbb {R})_0}\). The root \(\alpha _2\) is the highest weight of the symplectic representation of the vector fields, namely the \(\mathbf {W}=({\varvec{2}}_{\varvec{0}},\mathbf {6+2k})\)
The \(D=3\) algebra is, \(\mathbb {U}_{D=3}=\mathrm {SO(8,n_m+2)}\). Correspondingly the form taken by the general decomposition (1.7.12) is the following one:
where \({\varvec{2}}_{\mathbf{E,0 }}\) are the fundamental representations respectively of \(\mathrm {SL(2,}\mathbb {R})_\mathrm {E}\) and of \(\mathrm {SL(2,}\mathbb {R})_{0}\).
In order to give a Dynkin Weyl description of these algebras, we are forced to distinguish the case of an odd and even number of vector multiplets. In the first case both \(\mathbb {U}_{D=3}\) and \(\mathbb {U}_{D=4}\) are non simply laced algebras of the B-type, while in the second case they are both simply laced algebras of the D-type
Just for simplicity and for shortness we choose to discuss only the even case \(n_m=2k\) which is described by Fig. 5.8.
In this case we consider the \(\mathbb {U}_{D=3} =\mathrm {SO(8,2k+2)}\) Lie algebra whose Dynkin diagram is that of \(D_{5+k}\). Naming \(\varepsilon _i\) the unit vectors in an Euclidean \(\ell \)-dimensional space where \(\ell =5+k\), a well adapted basis of simple roots for the considered algebra is the following one:
which is quite different from the usual presentation but yields the correct Cartan matrix. In this basis the highest root of the algebra:
takes the desired form:
In the same basis the \(\alpha _W =\alpha _2\) root has also the expect form:
where:
is the weight of the symplectic representation \(\mathbf {W}=\left( {\varvec{2}}_{\varvec{0}} , \mathbf {6+2k}\right) \). Indeed \(-\frac{1}{\sqrt{2}}\, \varepsilon _1\) is the fundamental weight for the Lie algebra \(\mathrm {SL(2,\mathbb {R})_0}\), whose root is \(\alpha _1 = \sqrt{2} \, \varepsilon _1\), while \(-\varepsilon _2\) is the highest weight for the vector representation of the algebra \(\mathrm {SO(6,2k)}\), whose roots are \(\alpha _3, \alpha _4, \dots , \alpha _\ell \).
Next we briefly comment on the Tits Satake projection. The algebra \(\mathrm {SO(8,n_m+2)}\) is maximally split only for \(n_m=5,6,7\). The case \(n_m=6\), from the superstring view point, corresponds to the case of Neveu–Schwarz vector multiplets in a toroidal compactification. For a different number of vector multiplets, in particular for \(n_m>7\) the study of extremal black holes involves considering the Tits Satake projection, which just yields the universal algebra
5.6 Tits Satake Decompositions of the \(\mathbf {W}\) Representations
One of the goals that we plan to pursue in Chap. 6 is the comparison of the classification of extremal black holes by means of charge orbits with their classification by means of \(\mathrm {H}^\star \) orbits. Charge orbits means orbits of the \(\mathrm {U}_{\mathrm {D}=4}\) group in the \(\mathbf {W}\)-representation.
For this reason, in the present section we consider the decomposition of the \(\mathbf {W}\)-representations with respect to Tits–Satake subalgebras and Paint groups for all the non-exotic models. The relevant \(\mathbf {W}\)-representations are listed in Table 5.7. In Table 5.8 we listed the \(\mathbf {W}\)-representations for the exotic models.
Given the paint algebra \(\mathbb {G}_{\mathrm {paint}} \, \subset \, \mathbb {U}\) and the Tits Satake subalgebra \(\mathbb {G}_{\mathrm {TS}}\, \subset \, \mathbb {U}\), one introduces, as we have seen, the sub Tits Satake and sub paint algebras as the centralizers of the paint algebra and of the Tits Satake algebra, respectively. In other words we have:
and
As it was stressed repeatedly, a very important property of the paint and subpaint algebras is that they are conserved in the dimensional reduction, namely they are the same for \(\mathbb {U}_{D=4}\) and \(\mathbb {U}_{D=3}\).
In the next lines we analyze the decomposition of the \(\mathbf {W}\)-representations with respect to these subalgebras for each Tits Satake universality class of non maximally split models. In the case of maximally split models there is no paint algebra and there is nothing with respect to which to decompose.
5.6.1 Universality Class \(\mathfrak {sp}(6,\mathbb {R})\Rightarrow \mathfrak {f}_{4(4)}\)
In this case the sub Tits Satake Lie algebra is
and the \(\mathbf {W}\)-representation of the maximally split model decomposes as follows:
This decomposition combines in the following way with the paint group representations in the various models belonging to the same universality class.
5.6.1.1 \(\mathfrak {su}(3,3)\) Model
For this case the paint algebra is
and the \(\mathbf {W}\)-representation is the \(\mathbf {20}\) dimensional of \(\mathfrak {su}(3,3)\) corresponding to an antisymmetric tensor with a reality condition of the form:
The decomposition of this representation with respect to the Lie algebra \( \mathbb {G}_{\mathrm {paint}}\oplus {\mathbb {G}_{\mathrm {subTS}}}\) is the following one:
where (2, q) means a doublet of \(\mathfrak {so}(2)\oplus \mathfrak {so}(2)\) with a certain grading q with respect to the generators, while (1, 0) means the singlet that has 0 grading with respect to both generators. The subpaint algebra in this case is \( \mathbb {G}_{\mathrm {subpaint}}\, = \,0\) and the decomposition of the same \(\mathbf {W}\)-representation with respect to \(\mathbb {G}_{\mathrm {subpaint}} \oplus \mathbb {G}_{\mathrm {TS}}\) is:
This follows from the decomposition of the \(\mathbf {6}\) of \(\mathfrak {sp}(6,\mathbf {R})\) with respect to the sub Tits Satake algebra (5.6.3):
5.6.1.2 \(\mathfrak {so}^\star (12)\) Model
For this case the paint algebra is
and the \(\mathbf {W}\)-representation is the \(\mathbf {32}_s \) dimensional spinorial representation of \(\mathfrak {so}^\star (12)\). The decomposition of this representation with respect to the Lie algebra \( \mathbb {G}_{\mathrm {paint}}\oplus {\mathbb {G}_{\mathrm {subTS}}}\) is the following one:
where \(\underline{2}\) means the doublet spinor representation of \(\mathfrak {so}(3)\). The subpaint algebra in this case is \( \mathbb {G}_{\mathrm {paint}}\, = \,\mathfrak {so}(3)_{\mathrm {diag}}\) and the decomposition of the same \(\mathbf {W}\)-representation with respect to \(\mathbb {G}_{\mathrm {subpaint}} \oplus \mathbb {G}_{\mathrm {TS}}\) is:
This follows from the decomposition of the product \(\underline{2} \times \underline{2}\) of \(\mathfrak {so}(3)_{\mathrm {diag}}\) times the Tits Satake algebra (5.6.3):
5.6.1.3 \(\mathfrak {e}_{7(-25)}\) model
For this case the paint algebra is
and the \(\mathbf {W}\)-representation is the fundamental \(\mathbf {56} \) dimensional representation of \(\mathfrak {e}_{7(-25)}\) The decomposition of this representation with respect to the Lie algebra \( \mathbb {G}_{\mathrm {paint}}\oplus {\mathbb {G}_{\mathrm {subTS}}}\) is the following one:
where \(\mathbf {8}_{v,s,c}\) are the three inequivalent eight-dimensional representations of \(\mathfrak {so}(8)\), the vector, the spinor and the conjugate spinor. The subpaint algebra in this case is \( \mathbb {G}_{\mathrm {subpaint}}\, = \,\mathfrak {g}_{2(-14)}\) with respect to which all three 8-dimensional representations of \(\mathfrak {so}(8)\) branch as follows:
In view of this the decomposition of the same \(\mathbf {W}\)-representation with respect to \(\mathbb {G}_{\mathrm {subpaint}} \oplus \mathbb {G}_{\mathrm {TS}}\) is:
5.6.2 Universality Class \(\mathfrak {sl}(2,\mathbb {R}) \oplus \mathfrak {so}(2,3) \Rightarrow \mathfrak {so}(4,5)\)
This case corresponds to one of the possible infinite families of \(\mathscr {N}=2\) theories with a symmetric homogeneous special Kähler manifold and a number of vector multiplets larger than three (\(n=3+p\)). The other infinite family corresponds instead to one of the three exotic models.
The generic element of this infinite class corresponds to the following algebras:
In this case the sub Tits Satake algebra is:
an the paint and subpaint algebras are as follows:
The symplectic \(\mathbf {W}\) representation of \(\mathbb {U}_{\mathrm {D=4}}\) is the tensor product of the fundamental representation of \(\mathfrak {sl}(2)\) with the fundamental vector representation of \(\mathfrak {so}(2,2+p)\), namely
The decomposition of this representation with respect to \(\mathbb {G}_{\mathrm {subTS}} \oplus \mathbb {G}_{\mathrm {subpaint}}\) is the following one:
where \(\mathbf {2,2,2}\) denotes the tensor product of the three fundamental representations of \(\mathfrak {sl}(2,\mathbb {R})^3\). Similarly \(\mathbf {2,1,1}\) denotes the doublet of the first \(\mathfrak {sl}(2,\mathbb {R})\) tensored with the singlets of the following two \(\mathfrak {sl}(2,\mathbb {R})\) algebras. The representations appearing in (5.6.22) can be grouped in order to reconstruct full representations either of the complete Tits Satake or of the complete paint algebras. In this way one obtains:
5.6.3 Universality Class \(\mathfrak {sl}(2,\mathbb {R}) \oplus \mathfrak {so}(6,7) \Rightarrow \mathfrak {so}(8,9)\)
This case, which corresponds to an \(\mathscr {N}=4\) theory with a number of vector multiplets larger than six (\(n=6+p\)) presents a very strong similarity with the previous \(\mathscr {N}=2\) case.
The generic element of this infinite class corresponds to the following algebras:
In this case the sub Tits Satake algebra is:
an the paint and subpaint algebras are the same as in the previous \(\mathscr {N}=2\) case, namely:
The symplectic \(\mathbf {W}\) representation of \(\mathbb {U}_{\mathrm {D=4}}\) is the tensor product of the fundamental representation of \(\mathfrak {sl}(2)\) with the fundamental vector representation of \(\mathfrak {so}(6,6+p)\), namely
The decomposition of this representation with respect to \(\mathbb {G}_{\mathrm {subTS}} \oplus \mathbb {G}_{\mathrm {subpaint}}\) is the following one:
Just as above the three representations appearing in (5.6.28) can be grouped in order to obtain either representation of the complete Tits Satake or of the complete paint algebras. This yields
5.6.4 The Universality Classes \(\mathfrak {sl}(2,\mathbb {R}) \oplus \mathfrak {so}(6,n) \Rightarrow \mathfrak {so}(8,n+2)\) with \(n\le 5\)
These classes correspond to the \(\mathscr {N}=4\) theories with a number \(n=1,2,3,4,5\) of vector multiplets. In each case we have the following algebras:
In all these cases the Tits Satake and sub Tits Satake algebras are:
and the paint and subpaint algebras are:
The symplectic \(\mathbf {W}\) representation is the tensor product of the doublet representation of \(\mathfrak {sl}(2)\) with the fundamental representation of \(\mathfrak {so}(6,n) \), namely
and its decomposition with respect to the \(\mathbb {G}_{\mathrm {subTS}} \oplus \mathbb {G}_{\mathrm {subpaint}}\) algebra is as follows
which, with the same procedure as above leads to:
5.6.5 \(\mathbf {W}\)-Representations of the Maximally Split Non Exotic Models
In the previous subsections we have analysed the Tits–Satake decomposition of the \(\mathbf {W}\)-representation for all those models that are non maximally split. The remaining models are the maximally split ones for which there is no paint algebra and the Tits Satake projection is the identity map. For reader’s convenience we have extracted the list of such models and presented it in Table 5.6. As we see from the table we have essentially five type of models:
-
1.
The \(\mathrm {E_{7(7)}}\) model corresponding to \(\mathscr {N}=8\) supergravity where the \(\mathbf {W}\)-representation is the fundamental \(\mathbf {56}\).
-
2.
The \(\mathrm {SU(1,1)}\) non exotic model where the \(\mathbf {W}\)-representation is the \(j={\textstyle \frac{3}{2}}\) of \(\mathfrak {so}(1,2)\sim \mathfrak {su}(1,1)\)
-
3.
The \(\mathrm {Sp(6,\mathbb {R})}\) model where the \(\mathbf {W}\)-representation is the \(\mathbf {14}^\prime \) (antisymmetric symplectic traceless three-tensor).
-
4.
The models \(\mathfrak {sl}(2,\mathbb {R}) \oplus \mathfrak {so}(q,q)\) where the \(\mathbf {W}\)-representation is the \(\left( \mathrm {2,2q}\right) \), namely the tensor product of the two fundamentals.
-
5.
The models \(\mathfrak {sl}(2,\mathbb {R}) \oplus \mathfrak {so}(q,q+1)\) where the \(\mathbf {W}\)-representation is the \(\left( \mathrm {2,2q+1}\right) \), namely the tensor product of the two fundamentals.
Therefore, for the above maximally split models, the charge classification of black holes reduces to the classification of \(\mathrm {U}_{\mathrm {D}=4}\) orbits in the mentioned \(\mathbf {W}\)-representations. Actually such orbits are sufficient also for the non maximally split models. Indeed each of the above 5-models correspond to one Tits Satake universality class and, within each universality class, the only relevant part of the \(\mathbf {W}\)-representation is the subpaint group singlet which is universal for all members of the class. This is precisely what we verified in the previous subsections.
For instance for all members of the universality class of \(\mathrm {Sp(6,\mathbb {R})}\), the \(\mathbf {W}\)-representation splits as follows with respect to the subalgebra \(\mathfrak {sp}(6,\mathbb {R})\oplus \mathbb {G}_{\mathrm {subpaint}}\):
where the representation \(\mathscr {D}_{\mathrm {subpaint}}\) is the following one for the three non-maximally split members of the class:
Clearly the condition:
imposed on a vector in the \(\mathbf {W}\)-representation breaks the group \(\mathrm {U}_{D=4}\) to its Tits Satake subgroup. The key point is that each \(\mathbf {W}\)-orbit of the big group \(\mathrm {U}_{D=4}\) crosses the locus (5.6.38) so that the classification of \(\mathrm {Sp(6,\mathbb {R})}\) orbits in the \(\mathbf {14}^\prime \)-representation exhausts the classification of \(\mathbf {W}\)-orbits for all members of the universality class.
In order to prove that the gauge (5.6.38) is always reachable it suffices to show that the representation \(\left( \mathbf {6}\, | \,\mathscr {D}_{\mathrm {subpaint}}\right) \) always appears at least once in the decomposition of the Lie algebra \(\mathbb {U}_{D=4}\) with respect to the subalgebra \(\mathfrak {sp}(6,\mathbb {R})\oplus \mathbb {G}_{\mathrm {subpaint}}\). The corresponding parameters of the big group can be used to set to zero the projection of the \(\mathbf {W}\)-vector onto \(\left( \mathbf {6}\, | \,\mathscr {D}_{\mathrm {subpaint}}\right) \).
The required condition is easily verified since we have:

The reader cannot avoid being impressed by the striking similarity of the above decompositions which encode the very essence of Tits Satake universality. Indeed the representations of the common Tits Satake subalgebra appearing in the decomposition of the adjoint are the same for all members of the class. They are simply uniformly assigned to the fundamental representation of the subpaint algebra which is different in the three cases. The representation \(\left( \mathbf {6}\, | \,\mathscr {D}_{\mathrm {subpaint}}\right) \) appears twice in these decompositions and can be used to reach the gauge (5.6.38) as we claimed above.
For the models of type \(\mathfrak {sl}(2,\mathbb {R})\oplus \mathfrak {so}(q,q+p)\) having \(\mathfrak {sl}(2,\mathbb {R})\oplus \mathfrak {so}(q,q+1)\) as Tits Satake subalgebra and \(\mathfrak {so}(p-1)\) as subpaint algebra the decomposition of the \(\mathbf {W}\)-representation is the following one:
and the question is whether each \(\mathfrak {sl}(2,\mathbb {R})\oplus \mathfrak {so}(q,q+p)\) orbit in the \(\left( \mathbf {2,2q+p}\right) \) representation intersects the \(\mathfrak {sl}(2,\mathbb {R})\oplus \mathfrak {so}(q,q+1)\oplus \mathfrak {so}(p-1)\)-invariant locus:
The answer is yes since we always have enough parameters in the coset
to reach the desired gauge (5.6.41). Indeed let us observe the decomposition:
The \(2q+1\) vectors of \(\mathfrak {so}(p-1)\) appearing in (5.6.43) are certainly sufficient to set to zero the 2 vectors of \(\mathfrak {so}(p-1)\) appearing in \(\mathbf {W}\).
The conclusion therefore is that the classification of charge-orbits for all supergravity models can be performed by restriction to the Tits Satake sub-model. The same we show, in the next section, to be true at the level of the classification based on \(\mathrm {H}^\star \) orbits of the Lax operators, so that the final comparison of the two classifications can be performed by restriction to the Tits Satake subalgebras.
5.7 Tits Satake Reduction of the \(\mathbb {H}^\star \) Subalgebra and of Its Representation \(\mathbb {K}^\star \)
As we show in Chap. 6, in the \(\sigma \)-model approach to black hole solutions one arrives at the new coset manifold (4.3.41). The structure of the enlarged group \(\mathrm {U}_{D=3}\) and of its Lie algebra \(\mathbb {U}_{D=3}\) was discussed in Eq. (1.7.12). The subgroups \(\mathbb {H}^\star \) are listed in Table 5.7 for the non exotic models and in Table 5.8 for the exotic ones. The coset generators fall into a representation of \(\mathbb {H}^\star \) that we name \(\mathbb {K}^\star \). The Lax operator \(L_0\) which determines the spherically symmetric black hole solution up to boundary conditions of the scalar fields at infinity is just an element of such a representation:
so that the classification of spherical black holes is reduced to the classification of \(\mathbb {H}^\star \) orbits in the \(\mathbb {K}^\star \) representation. On the other hand, in Chap. 6, we demonstrate how nilpotent orbits can be associated to multicenter solutions.
We focus on non-exotic models that admit a regular Tits Satake projection.
A first general remark concerns the structure of \(\mathbb {H}^\star \) in all those models that correspond to \(\mathscr {N}=2\) supersymmetry. In these cases the \(\mathbb {H}^\star \) subalgebra is isomorphic to \(\mathfrak {sl}(2,\mathbb {R}) \oplus \mathbb {U}_{D=4}\) so that we have a decomposition of the \(\mathbb {U}_{D=3}\) Lie algebra with respect to \(\mathbb {H}^\star \) completely analogous to that in Eq. (1.7.12), namely:
Hence the representation \(\mathbb {K}^\star \) which contains the Lax operators has a structure analogous to the representation which contains the generators of \(\mathbb {U}_{D=4}\) that originate from the vector fields, namely: \((2_{\mathrm {h}^\star },\widehat{\mathbf {W}}) \). This means that in all these models, by means of exactly the same argument as utilized above, we can always reach the gauge where the \(\mathbb {K}^\star \) representation is localized on the image of the Tits Satake projection \(\mathbb {K}^\star _{\mathrm {TS}}\). For instance, for the models in the \(\mathfrak {f}_{4(4)}\) universality class we have:
and:
and the two representations \(\left( \mathbf {6}\, | \, \mathscr {D}_{\mathrm {subpaint}}\right) \) appearing in the adjoint representation of \(\mathbb {H}^\star \) can be utilized to get rid of \(\left( 2_{\mathrm {h}^\star } \, , \, \mathbf {6}\, | \, \mathscr {D}_{\mathrm {subpaint}}\right) \) appearing in the decomposition of \(\mathbb {K}^\star \).
What is important to stress is that, although isomorphic \(\mathbb {H}^\star \) and \(\mathfrak {sl}(2,\mathbb {R}) \oplus \mathbb {U}_{D=4} \) are different subalgebras of \(\mathbb {U}_{D=3}\):
Moreover, while the decomposition (1.7.12) is universal and holds true for all supergravity models, the structure (5.7.3) of the \(\mathbb {H}^\star \) subalgebra is peculiar to the \(\mathscr {N}=2\) models. In other cases the structure of \(\mathbb {H}^\star \) is different.
The reduction to the Tits Satake projection however is universal and applies to all non maximally split cases.
Indeed the remaining cases are of the form:
leading to
where:
Considering the coset:
we see that its \((q+3)\times (p-1)\) parameters are arranged into the
representation of \(\mathfrak {so}(q+1,2)\oplus \mathfrak {so}(p-1)\) and can be used to put to zero the component \(\left( \mathbf {q+2,1,p-1}\right) \) in the decomposition (5.7.7). Note that the \(\mathscr {N}=4\) cases with more than 6 vector multiplets are covered by the above formulae by setting:
Similarly the \(\mathscr {N}=2\) cases with more than 3 vector multiplets are covered by the above formulae by setting:
Finally the \(\mathscr {N}=4\) cases with less than 6 vector multiplets are covered by the above formulae by setting:
5.8 The General Structure of the \(\mathbb {H}^\star \oplus \mathbb {K}^\star \) Decomposition in the Maximally Split Models
In the previous section we have shown that all \(\mathrm {H}^\star \) orbits in the \(\mathbb {K}^\star \) representation cross the locus defined by:
where \(\varPi _{\mathrm {TS}}\) is the Tits–Satake projection.
In other words just as for the \(\mathbf {W}\)-representation of \(\mathrm {U}_{D=4}\), it suffices to classify the orbits \(\mathrm {H}^\star _{\mathrm {TS}}\) in the \(\mathbb {K}^\star _{\mathrm {TS}}\) representation. In view of this result, in the present section we study the general structure of the \(\mathbb {H}^\star \oplus \mathbb {K}^\star \) decomposition for maximally split algebras \(\mathbb {U}_{D=3}\).
A key point in our following discussion is provided by the structure of the root system of \(\mathbb {U}_{D=3}\) as described in Sect. 5.5.3. The entire set of positive roots can be written as follows:
where \(\overline{\alpha } >0\) denotes the set of all positive roots of \(\mathbb {U}_{D=4}\), while \(\overline{\mathbf {w}}\) denotes the complete set of weights (positive, negative and null) of the \(\mathbf {W}\) representation of \(\mathbb {U}_{D=4}\). The root \(\psi \) is the highest root of the \(\mathbb {U}_{D=3}\) root system and is also the root of the Ehlers subalgebra \(\mathfrak {sl}(2,\mathbb {R})_E\). Accordingly, a basis of the Cartan subalgebra of \(\mathbb {U}_{D=3}\) is constructed as follows:
For all maximally split Lie algebras \(\mathbb {U}\) of rank \(r+1\), the maximal compact subalgebra \(\mathbb {H}\subset \mathbb {U} \) is generated by:
while the complementary orthogonal space \(\mathbb {K}\) is generated by
The splitting \(\mathbb {H}^\star \oplus \mathbb {K}^\star \) is obtained by means of just one change of sign which, thanks to the structure (5.8.2) of the root system is consistent, namely still singles out a subalgebra.
The generators of the \(\mathbb {H}^\star \) subalgebra are as follows:
while the generators of the \(\mathbb {K}^\star \) complementary subspace are as follows:
From Eq. (5.8.7) we see that \(\mathbb {H}^\star \) contains the maximal compact subalgebra of the original \(\mathbb {U}_{D=4}\) and the maximal compact subalgebra \(\mathfrak {so}(2) \, \subset \, \mathfrak {sl}(2,R)_E\) of the Ehlers group. Using this structure we can now compare the classification of \(\mathbb {K}^\star \) orbits with the classification of \(\mathbf {W}\)-orbits.
5.9 \(\mathbb {K}^\star \) Orbits Versus \(\mathbf {W}\)-Orbits
In the \(\sigma \)-model approach the complete black hole spherically symmetric supergravity solution is obtained from two data,Footnote 2 namely the Lax operator \(L_0\) evaluated at spatial infinity (see Eq. (5.7.1)) and the coset representative \(\mathbb {L}_0\) also evaluated at spatial infinity. In terms of these data one defines the matrix of conserved Noether charges:
from which the electromagnetic charges of the black hole, belonging to the \(\mathbf {W}\)-representation of \(\mathrm {U}_{D=4}\), can be obtained by means of the following trace:
where
are the generators of the solvable Lie algebra corresponding to the \(\mathbf {W}\)-representation.
It is important to stress that, because of physical boundary conditions, the coset representative at spatial infinity \(\mathbb {L}_0\) belongs to the subgroup \(\mathrm {U}_{D=4} \subset \mathrm {U}_{D=3}\). Indeed it simply encodes the boundary values at infinity of the \(D=4\) scalar fields:
Using this information in Eq. (5.9.2) we obtain
where:
are the electromagnetic charges obtained with no scalar field dressing at infinity and
is the matrix representing the group element \( \mathbb {L}_0(\phi )\) in the \(\mathbf {W}\)-representation.
This result has a very significant consequence. The scalar field dressing at infinity simply rotates the charge vector along the same \(\mathbf {W}\)-orbit and is therefore irrelevant.
Hence we conclude that for each Lax operator, the \(\mathbf {W}\)-orbit of charges is completely determined and unique. The next question is whether the charge-orbit \(\mathbf {W}\) is the same for all Lax operators belonging to the same \(\mathrm {H}^\star \)-orbit. As already anticipated, the answer is no and it is quite easy to produce counter examples.
Yet if we impose the condition that the Taub-NUT charge should be zero:
then for all Lax operators in the same \(\mathrm {H}^\star \), satisfying the additional constraint (5.9.8), the corresponding charges \(Q^w \, = \, \text {Tr}\left( L_0 \, T^w\right) \) fall into the same \(\mathbf {W}\)-orbit.
We were not able to prove this statement, but we assert it as a conjecture, since we analyzed many cases and it was always true, no counter example being ever found.
In the case of multicenter non spherically symmetric solutions our conjecture appears to be true as long as we impose the condition of vanishing of the Taub-NUT current:
So doing, at every pole of the involved harmonic functions, we obtain a black hole that always falls into the same \(\mathbf {W}\)-orbit.
What happens instead when the Taub-NUT current is turned on cannot be predicted in general terms at the present status of our knowledge and more study is certainly in order.
The reader will understand the meaning of the last two paragraphs by carefully reading Chap. 6. In the present one we outlined the entire beautiful group-theoretical machinery that sustains the construction and classification of black-hole geometries addressed there.
Notes
- 1.
An apparent exception is given by the case of \(\mathscr {N}=3\) supergravity. The extra complicacy, there, is that the duality algebra in \(D=3\), namely \(\mathbb {U}_{D=3}\) has rank \(r+2\), rather than \(r+1\) with respect to the rank of the algebra \(\mathbb {U}_{D=4}\). Actually in this case there is an extra \(\mathrm {U(1)}_{\mathrm{Z}}\) factor that is active on the vectors, but not on the scalars and which is responsible for the additional complications. It happens in this case that there are two vector roots, one for the complex representation to which the vectors are assigned and one for its conjugate. They have opposite charges under \(\mathrm {U(1)}_\mathrm{Z}\). This case together with that of \(\mathscr {N}=5\) supergravity and with one of the series of \(\mathscr {N}=2\) theories completes the list of three exotic models which are anomalous also from the point of view of the Tits Satake projection (see below).
- 2.
References
I. Satake, On representations and compactifications of symmetric riemannian spaces. Ann. Math. 71, 77–110 (1960). Second Series
J. Tits, Classification of algebraic semisimple groups, in Algebraic Groups and Discontinuous Subgroups (Proceedings of Symposia in Pure Mathematics, Boulder, Colorado, 1965), p. 33–62
A. Borel, J. Tits, Groupes réductifs. Publications Mathémathiques de l’IHES 27, 55–151 (1965); Compléments à l’article 41, 253–276 (1972)
B. de Wit, A. Van Proeyen, Broken sigma model isometries in very special geometry. Phys. Lett. B 293, 94–99 (1992)
B. de Wit, F. Vanderseypen, A. Van Proeyen, Symmetry structure of special geometries. Nucl. Phys. B 400, 463–524 (1993)
B. de Wit, A. Van Proeyen, Isometries of special manifolds (1995)
D.V. Alekseevsky, V. Cortes, C. Devchand, A. Van Proeyen, Polyvector super Poincare algebras. Commun. Math. Phys. 253, 385–422 (2004)
L. Andrianopoli, R. D’Auria, S. Ferrara, P. Fré, M. Trigiante, R-R scalars, U-duality and solvable Lie algebras. Nucl. Phys. B 496, 617–629 (1997), arXiv:hep-th/9611014
L. Andrianopoli, R. D’Auria, S. Ferrara, P. Fré, R. Minasian, M. Trigiante, Solvable Lie algebras in type IIA, type IIB and M-theories. Nucl. Phys. B 493, 249–277 (1997), arXiv:hep-th/9612202
M. Trigiante, Dualities in supergravity and solvable Lie algebras, Ph.D. thesis, Swansea University, 1998
V. Belinsky, I. Khalatnikov, E. Lifshitz, Oscillatory approach to a singular point in the relativistic cosmology. Adv. Phys. 19, 525–573 (1970)
V. Belinsky, I. Khalatnikov, E. Lifshitz, A general solution of the einstein equations with a time singularity. Adv. Phys. 31, 639–667 (1982)
J.K. Erickson, D.H. Wesley, P.J. Steinhardt, N. Turok, Kasner and mixmaster behavior in universes with equation of state \(w\ge 1\). Phys. Rev. D 69, 063514 (2004)
J. Demaret, M. Henneaux, P. Spindel, Nonoscillatory behavior in vacuum Kaluza–Klein cosmologies. Phys. Lett. 164B, 27–30 (1985)
J. Demaret, J.L. Hanquin, M. Henneaux, P. Spindel, A. Taormina, The fate of the mixmaster behavior in vacuum inhomogeneous Kaluza–Klein cosmological models. Phys. Lett. B 175, 129–132 (1986)
J. Demaret, Y. De Rop, M. Henneaux, Chaos in nondiagonal spatially homogeneous cosmological models in space-time dimensions \(\le \) 10. Phys. Lett. B 211, 37–41 (1988)
T. Damour, M. Henneaux, B. Julia, H. Nicolai, Hyperbolic Kac–Moody algebras and chaos in Kaluza–Klein models. Phys. Lett. B 509, 323–330 (2001)
T. Damour, S. de Buyl, M. Henneaux, C. Schomblond, Einstein billiards and overextensions of finite dimensional simple Lie algebras. JHEP 08, 030 (2002)
T. Damour, M. Henneaux, H. Nicolai, Cosmological billiards. Class. Quantum Gravity 20, R145–R200 (2003)
S. de Buyl, M. Henneaux, B. Julia, L. Paulot, Cosmological billiards and oxidation. Fortsch. Phys. 52, 548–554 (2004). [PoSjhw2003, 015 (2003)]
J. Brown, O.J. Ganor, C. Helfgott, M theory and E(10): billiards, branes, and imaginary roots. JHEP 08, 063 (2004)
F. Englert, M. Henneaux, L. Houart, From very-extended to overextended gravity and M-theories. JHEP 02, 070 (2005)
T. Damour, Cosmological singularities, Einstein billiards and Lorentzian Kac–Moody algebras, in Miami Waves 2004: Conference on Geometric Analysis, Nonlinear Wave Equations and General Relativity Coral Gables, Florida, 4-10 January 2004, (2005). [J. Hyperbol. Diff. Equat. (2005)]
T. Damour, Poincare, relativity, billiards and symmetry, in Proceedings, Symposium Henri Poincare, Brussels, Belgium, 8-9 October 2004, (2005), p. 149
M. Henneaux, B. Julia, Hyperbolic billiards of pure D \(=\) 4 supergravities. JHEP 05, 047 (2003)
A. Keurentjes, The group theory of oxidation. Nucl. Phys. B 658, 303–347 (2003)
A. Keurentjes, The group theory of oxidation 2: cosets of nonsplit groups. Nucl. Phys. B 658, 348–372 (2003)
P. Fré, V. Gili, F. Gargiulo, A.S. Sorin, K. Rulik, M. Trigiante, Cosmological backgrounds of superstring theory and solvable algebras: oxidation and branes. Nucl. Phys. B 685, 3–64 (2004)
P. Fré, A.S. Sorin, Integrability of supergravity billiards and the generalized Toda lattice equation. Nucl. Phys. B 733, 334–355 (2006)
P. Fre, A.S. Sorin, The Weyl group and asymptotics: all supergravity billiards have a closed form general integral. Nucl. Phys. B 815, 430–494 (2009)
P. Fré, F. Gargiulo, K. Rulik, Cosmic billiards with painted walls in non-maximal supergravities: a worked out example. Nucl. Phys. B 737, 1–48 (2006). https://doi.org/10.1016/j.nuclphysb.2005.10.023, arXiv:hep-th/0507256
P. Fre, F. Gargiulo, J. Rosseel, K. Rulik, M. Trigiante, A. Van Proeyen, Tits–Satake projections of homogeneous special geometries. Class. Quantum Gravity 24, 27–78 (2007)
P. Fré, A. Sorin, Supergravity black holes and billiards and liouville integrable structure of dual borel algebras. JHEP 03, 066 (2010)
P. Fré, A. Sorin, The integration algorithm for nilpotent orbits of \(g/h^\star \) lax systems: for extremal black holes (2009)
W. Chemissany, J. Rosseel, M. Trigiante, T. Van Riet, The full integration of black hole solutions to symmetric supergravity theories. Nucl. Phys. B 830, 391 (2010)
M. Gaillard, Z. Bruno, Duality rotations for interacting fields. Nucl. Phys. B 193, 221 (1981)
P. Breitenlohner, D. Maison, G.W. Gibbons, Four-dimensional black holes from Kaluza–Klein theories. Commun. Math. Phys. 120, 295 (1988)
M. Gunaydin, A. Neitzke, B. Pioline, A. Waldron, Bps black holes, quantum attractor flows and automorphic forms. Phys. Rev. D 73, 084019 (2006)
B. Pioline, Lectures on black holes, topological strings and quantum attractors. Class. Quantum Gravity 23, S981 (2006)
M. Gunaydin, A. Neitzke, B. Pioline, A. Waldron, Quantum attractor flows. JHEP 0709, 056 (2007)
D. Gaiotto, W. Li, M. Padi, Non-supersymmetric attractor flow in symmetric spaces. JHEP 12, 093 (2007)
E. Bergshoeff, W. Chemissany, A. Ploegh, M. Trigiante, T. Van Riet, Generating geodesic flows and supergravity solutions. Nucl. Phys. B 812, 343 (2009)
G. Bossard, H. Nicolai, K. Stelle, Universal bps structure of stationary supergravity solutions. JHEP 0907, 003 (2009)
P. Frè, A. Sorin, M. Trigiante, Integrability of supergravity black holes and new tensor classifiers of regular and nilpotent orbits. JHEP 1204, 015 (2012)
P. Frè, A. Sorin, M. Trigiante, Black hole nilpotent orbits and tits satake universality classes (2011)
P. Fre’, F. Gargiulo, K. Rulik, M. Trigiante, The general pattern of Kac Moody extensions in supergravity and the issue of cosmic billiards. Nucl. Phys. B 741, 42–82 (2006)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Copyright information
© 2018 Springer International Publishing AG
About this chapter

Cite this chapter
Fré, P.G. (2018). Solvable Algebras and the Tits Satake Projection. In: Advances in Geometry and Lie Algebras from Supergravity. Theoretical and Mathematical Physics. Springer, Cham. https://doi.org/10.1007/978-3-319-74491-9_5
Download citation
DOI: https://doi.org/10.1007/978-3-319-74491-9_5
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-74490-2
Online ISBN: 978-3-319-74491-9
eBook Packages: Physics and AstronomyPhysics and Astronomy (R0)