
Abstract
The multibeam data provides backscatter and bathymetry accurate measurement of water depth information this valuable is related to the topography and composition of the seafloor. From multibeam dataset, the backscatter information and comprising bathymetry derivatives were interpreted using the ArcGIS software. The sediment samples from ground survey were collected using Ponar Grab and classified the size of sediment using Particle Size Analysis (PSA). The sieving method was also applied for coarse sediment samples. Ground survey data were used on verification and determination of sediment map accuracy produced by GIS analysis. In this study, maps of backscatter, bathymetry, slope and rugosity were developed and applied for developing seabed characterization classes. The result shows the seabed sediment from the study area was successfully developed with overall accuracy of 88.2% and kappa coefficient of 0.82. The study provided the opportunity on increasing the accuracy on determining the seabed sediment characteristic within the multibeam coverage area.
Access provided by CONRICYT-eBooks. Download chapter PDF
Similar content being viewed by others
Keywords
1 Introduction
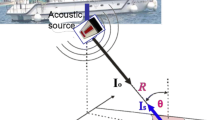
A multibeam echo sounder system (MBES) is a system that sends out a broad swath of sound pulse, bouncing over a wide area of seafloor beneath the survey. By calculating the two-way travel time of the sound pulses, the system determines the depth of the water beneath the vessel. Two types of data collected from the multibeam echo sounder system are backscatter data and bathymetry data. Backscatter data allows the user to determine the type of seafloor by analyzing the strength of the returned sound pulse [7]. Hard sediment such as boulder or gravel will sent strong return signals to the system while mud and sand will send weak return [3, 8]. Bathymetry data is returned by calculating the two way travel times, which display the depths of a wide area beneath the survey vessel [13]. Both data can be derived simultaneously in on single transect. The main purpose of the study is to utilize the output of multibeam data on developing seabed sediment characteristic with better accuracy.
2 Study Area
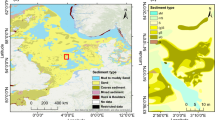
The study area covers part of West of the Pulau Bidong. The coverage for this survey area is approximately 406,183 m2. The area is selected as the study area due to the availability of bathymetry data and backscatter data to classify the seafloor terrain characteristics. The height range of this area is 5 m up to 33 m. Figure 1 shows the location of the study area.

Location of the study area
3 Methodology
The methodology of this study is organized into three main stages (i) data acquisition, (ii) data processing and (iii) data analysis. Figure 2 shows the flowchart of the methodology adopted for this study.

Flowchart of the research methodology
For this study, Multibeam Model R2 sonic 2020 system was used for data acquisition to provide bathymetry data and backscatter data. Table 1 shows the list of the survey equipment used.
Backscatter and bathymetry was processed using the FMGeocoder Toolbox (FMGT) [6] and Qimera software. The backscatter processing using FMGT as part of this research intended to improve the quality of the backscatter mosaic for sediment classification using supervised classification in ArcGIS 10.1 using sediment sample data [2, 9]. Figure 3 shows the backscatter mosaic map of the Pulau Bidong.

Backscatter mosaic map of the study area
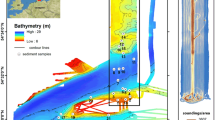
The Qimera software is a processing tool to produce a bathymetry grid. First the processing tide, sound velocity profile (SVP) and patch test (roll, pitch and heading) is done first. Removal of spikes or noise and other issues related to relatively poor data quality in survey area is required. The bathymetry grid data is exported to .geotiff format so further processing is done in ArcGIS 10.1 using the Benthic Terrain Modeler (BTM) [15]. Figure 4 shows the bathymetry map of the Pulau Bidong.

Bathymetry map of the study area
The sample sediment was collected after the multibeam survey. Total sample was collect 9 stations using a ponar grab. The physical sample processing using a sieve was conducted on all samples. The sample that has been processed can determine the type of the sediment [1, 10].
Further processing involved the bathymetry derivatives [3] and backscatter classification with sediment information (sample survey). Backscatter classification and bathymetry derivatives can be done with the Arcgis 10.3 software using the image classification toolbox [11]. Maximum likelihood classification was used by the supervised classification with the sample sediment to classify all the study area. This method was chosen to classify the pixels. Data from Particle Size Analysis as a guideline to classify certain pixels to identify the distribution of the sediment based on pixels characteristics where it is correlated with different type of sediment. Data variable between backscatter, bathymetry derivatives (slope, rugosity) and ground truth data to know how reliable based on the error matrix. Kappa coefficient will determine the accuracy assessment to evaluate the reliability of the data.
The bathymetry derivatives were generated using Benthic Terrain Modeler (BTM) [15] in the ArcGIS 10.3 software to generate the slope and rugosity [5, 14]. Slope is an identifier of the gradient or rate of maximum change in z-value from each cell of a raster surface. The slope calculation must be correct by casting a z factor when the unit z is applied to units different from the ground x, y.
The rugosity measures the terrain ruggedness as the variation in three-dimensional orientation of grid cells within a neighborhood. Vector analysis is used to calculate the dispersion of the vectors normal (orthogonal) to grid cells within the specified neighborhood. This method effectively captures the variability in slope and aspect into a single measure. Ruggedness values in the output raster can range from 0 (no terrain variation) to 1 (complete terrain variation). Typical values for natural terrains range between 0 and about 0.4.
4 Results and Discussion
The sediment information from the sample sediment shown in Table 2. The result was obtained from sediment processing using the sieve method. The results for stations 1–4 show very coarse sediment type sand while the stations 5, 6 and 9 reveal very fine gravel. Station 6 and 8 belong to coarse sand.
Referring to Fig. 5a that the highest slope from the bathymetry derivatives is more than 84° and the lowest slope is below 0°. Most of the areas in the study area have a slope ranging from 0° to 20°. Table 3 shows the class by slope map.


a Bathymetry derivatives— slope, b Bathymetry derivatives—rugosity
From Fig. 5b, the highest rugosity obtained from the bathymetry derivatives is more than 0.77 and the lowest rugosity is below 0. Most of the area in the study area has a slope ranging from 0 to 0.2. Table 4 shows the class by rugosity map.
The classification of the backscatter data and bathymetry derivatives (slope and rugosity) was done by using a sediment sample with ArcGIS 10.3 software. The backscatter classification results were classified into very coarse sand, very fine gravel and coarse sand. Figure 6 shows the corresponding sediment map.

Seabed sediment map of the study area produced from backscatter and bathymetry derivatives of multibeam echo sounder
Tables 5 and 6 shows the accuracy assessment for the sediment classification. The error matrix was used for the classification because the possible error occurred when classifying the map based on the selected pixels which did not match with the ground truth data. Accuracy assessment is 88.2% and Kappa coefficient is 0.82. A kappa value of 1 implies complete agreement, while a value less than 0 implies more disagreement than a random assignment of classes to one of the maps [12].
5 Conclusion
Multibeam surveys collected bathymetric data and backscatter data at a very high resolution. Using this type of dataset, large areas can be examined at various scales to get a regional overview of the seafloor characteristic, as well as detailed studies of particular features. The availability within this study of both multibeam bathymetry and ground true sample sediment provides an interesting opportunity to investigate the relationship between seafloor morphology and geology structures.
The results of this study, i.e. backscatter classification and bathymetry derivatives from multibeam sonar can be used to study another application in the guiding the location and extent of infrastructure developments. For fisheries management, a combination of the bathymetry and rugosity layers can provide a surrogate for reef localities and therefore potential reef fish distribution.
References
Brown, C.J., Cooper, K.M., Meadows, W.J., Limpenny, D.S., Rees, H.L.: Small-scale mapping of sea-bed assemblages in the eastern English channel using sidescan sonar and remote sampling techniques. Estuar. Coast. Shelf Sci. 54, 263–278 (2002)
Burrough, P.A., McDonnell, R.A.: Principles of Geographic Information Systems. Oxford University Press, Oxford (1998)
Dolan, M.F.J., Grehan, A.J., Guinan, J.C., Brown, C.: Modelling the local distribution of cold-water corals in relation to bathymetric variables: adding spatial context to deep-sea video data. Deep-Sea Res. Part I 55, 1564–1579 (2008)
Edwards, B.D., Dartnell, P., Chezar, H.: Characterizing benthic substrates of Santa Monica Bay with seafloor photography and multibeam sonar imagery. Mar. Environ. Res. 56, 47–66 (2003)
Guinan, J., Grehan, A.J., Dolan, M.F.J., Brown, C.: Quantifying relationships between video observations of cold-water coral cover and seafloor features in Rockall Trough, west of Ireland. Mar. Ecol. Prog. Ser. 375, 125–138 (2009)
IVS3D Fledermaus: Fledermaus reference manual. Version 7 (2011)
Lamarche, G., Lurton, X., Verdier, A.-L., Augustin, J.-M.: Quantitative characterisation of seafloor substrate and bedforms using advanced processing of multibeam backscatter—application to cook strait, New Zealand. Cont. Shelf Res. 31, S93–S109 (2011)
Li, J., Siwabessy, J., Tran, M., Huang, Z., Heap, A.: Predicting seabed hardness using random forest in R. In: Zhao, Y., Cen, Y. (eds.) Data Mining Applications with R. Elsevier (2013, in press)
Mcgonigle, C., Brown, C.J., Quinn, R.: Operational parameters, data density and benthic ecology: considerations for image-based classification of multibeam backscatter. Mar. Geodesy 33, 16–38 (2010)
Mcgonigle, C., Collier, J.S.: Interlinking backscatter, grain size and benthic community structure. Estuar. Coast. Shelf Sci. 147, 123–136 (2014)
Micallef, A., Le Bas, T.P., Huvenne, V.A.I., Blondel, P., Hühnerbach, V., Deidun, A.: A multi-method approach for benthic habitat mapping of shallow coastal areas with high-resolution multibeam data. Cont. Shelf Res. 39(40), 14–26 (2012)
Rositter, D.G.: Statistical methods for accuracy assesment of classified thematic maps. Department of Earth System Analysis (2014)
Siwabessy, P.J.W., Daniell, J., Li, J., Huang, Z., Heap, A.D., Nichol S., Anderson, T.J., Tran, M.: Methodologies for seabed substrate characterisation using multibeam bathymetry, backscatter and video data: a case study from the carbonate banks of the Timor Sea, Northern Australia. Record 2013/11. Geoscience Australia, Canberra (2013)
Tong, R.: Influence of seabed topography on cold-water coral distribution and habitat suitability. Ph.D. Thesis, Jacobs University, p. 119 (2012)
Wright, D.J., Pendleton, M., Boulware, J., Walbridge, S., Gerlt, B., Eslinger, D., Sampson, D., Huntley, E.: ArcGIS Benthic Terrain Modeler (BTM), v. 3.0. Environmental Systems Research Institute, NOAA Coastal Services Center, Massachusetts Office of Coastal Zone Management. Available online at http://esriurl.com/5754 (2012)
Acknowledgements
The authors thanked the University Malaysia Terengganu (UMT) and Universiti Teknologi Malaysia (UTM) Razak School of Engineering and Advanced Technology, for research facilities and financial assistance provided for this project.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer International Publishing AG
About this chapter

Cite this chapter
Zakariya, R., Abdullah, M.A., Hasan, R.C., Khalil, I. (2018). The Use of Backscatter Classification and Bathymetry Derivatives from Multibeam Data for Seabed Sediment Characterization. In: Öchsner, A. (eds) Engineering Applications for New Materials and Technologies . Advanced Structured Materials, vol 85. Springer, Cham. https://doi.org/10.1007/978-3-319-72697-7_47
Download citation
DOI: https://doi.org/10.1007/978-3-319-72697-7_47
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-72696-0
Online ISBN: 978-3-319-72697-7
eBook Packages: EngineeringEngineering (R0)