
Abstract
Motion capture of human body potentially holds great significance for exoskeleton robots, human-computer interaction, sports and rehabilitation research. Dielectric Elastomer Sensors (DESs) are excellent candidates for wearable human motion capture system because of their intrinsic characteristics of softness, lightweight and compliance. Fabrication process of the DES was developed, but a very few of optimal design is mentioned. To get greater measurement precision, in this paper, some optimization criteria was put forward and validated by some experiments. As a practical example, the sensor was mounted on the wrist to measure joint rotation. The experiment results indicated that there is a roughly linear relationship between the output voltage and the joint angle. Therefore, the DES can be applied to motion capture of human body.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
In recent years, the demands of human motion capture have been increasing in the fields of exoskeleton robots, human-computer interaction, sports, and many others. Some technologies for motion capture are already applied in engineering, but they suffer from serious limitations. For example, optical system is limited to the room where the cameras are installed [1]; Inertial Measurement Units (IMUs) suffer from integration drift [2, 3]; goniometers are bulky and uncomfortable because of the hard elements [4].
Dielectric Elastomer Sensors (DESs) are soft, lightweight and compliant, can be worn directly on the human body, and overcomes the above disadvantages. It is an excellent candidate for wearable human motion capture system. The DES can be used as a pressure sensor or a stretchable sensor. The state of the art in DES pressure sensors is a growing field. In one study, Kasahara et al. [5] fabricated a flexible capacitive tactile sensor and could detect the direction and distribution of force. In another, Kim et al. [6] used plastic structures and dielectric elastomer capacitors to fabricate a six-axis force/torque sensor. In a third study, Böse et al. [7, 8] designed an innovative dielectric elastomer compression sensor which could convert the compression load to a tensile load by the various wave profile structures and had a high sensitivity. The research involving DES stretchable sensor is also being widely reaserched. In one example, Anderson et al. [9] developed a stretchable sensor to measure strain up to 80% with good accuracy. In addition, Considerable work has been done on self-sensing transducer namely on how to extract strain information during actuation [10,11,12,13].
The optimal design is a necessity work for DES to improve measurement precision. However, there are a few of researches about it. Therefore, this paper is focused on the optimal design of DES.
2 Working Principle of the DES
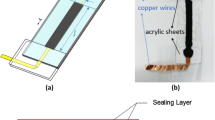
The typical DES consists of three layers of DE membranes and two layers of soft electrodes, as shown in Fig. 1(a). The middle layer is the dielectric, while the outer layers are used for protection. This structure creates an electrically flexible capacitor. The simplified equivalent electrical model is a variable capacitor C in series with two variable resistors R, as show in Fig. 1(b).

(a) Typical structure of the DES (b) Equivalent circuit of the DES
Both the capacitance and the resistance will change with deformation of the DES, and these changes can be used to infer the deformations. Compared to the series resistance, measuring changes in capacitance with deformation is more straightforward and reliable because the resistance is extremely dependent on the electrode uniformity and environmental temperature [14]. According to Eq. (1), the capacitance \( C \) is simply related to the overlapping electrode area \( A \), the thickness of the dielectric layer \( d \), the relative permittivity of the dielectric layer material \( \varepsilon_{r} \), and the permittivity of free space \( \varepsilon_{0} \).
The schematic diagram of detection circuit is shown in Fig. 2. Its working principle is that the capacitance of the sensor is converted into the circuit output voltage by integrating the charging current of the capacitance. By setting appropriate circuit parameters, the relation between DES capacitance and circuit output voltage can be expressed as:

The schematic diagram of detection circuit
Where \( k \) is a constant, decided by the circuit parameters, \( V_{OUT} \) is the circuit output voltage, \( C_{{}} \) is the capacitance of DES.
3 Fabrication of the DES
The dielectric elastomer membrane was fabricated from a two-component polydimethylsiloxane (PDMS) silicone elastomer. The two PDMS components were mixed, with the addition of a solvent (isooctane) using a planetary mixer (Thinky ARE-310) that also degassed the PDMS/solvent solution. The isooctane lowered the viscosity of the mixture, making it easier to cast. The mixture was cast on a substrate (polyethylene terephthalate, PET) using an automatic film coater (ZEHNTNER, ZAA2300) with a thickness determined by a universal applicator (ZEHNTNER, ZUA2000) [15]. The PDMS was then allowed to cure in the oven at approximately 80 °C. The soft electrode consisted of carbon particles (EC300 J) dispersed in a soft silicone matrix (MED4901, Nusil) with a 1:10 mass ratio [16]. The electrode was then applied to both sides of the dielectric layer and subsequently cured in an oven at approximately 80 °C. Finally, a short exposure to oxygen plasma was used to bond the electrode and protection layers together [17].
4 Optimal Design of the DES
To precisely measure human joint movement, high sensitivity is needed. For example, an output voltage noise has a smaller influence on measurement precision of the sensor with a higher sensitivity than a lower one for DESs. Besides, the great sensitivity can also improve the resolution.
4.1 Theoretical Analysis and Optimization Criteria
The undeformed shape of the electrode area of the DES was a rectangle. So the stretch ratio of sensor in three directions can be defined as:
Where, \( l_{0} \) is original length of electrode area of the sensor, \( b_{0} \) is original width of electrode area of the sensor and \( d_{0} \) is original thickness of the dielectric layer. \( \Delta l \) is variation of the length, \( \Delta b \) and \( \Delta d \) have similar definition.
So, the Formula (1) can be rewritten as:
Because the volume of the sensor cannot be compressed and the sensor is uniaxial stretched, namely,
The Formula (4) can be rewritten as:
The sensitivity of DES can be defined as:
Based on Formula (7), sensitivity of the DES can be improved by increasing the width of electrode area, decreasing thickness of the dielectric layer or selecting the material with higher relative permittivity as the dielectric layer.
4.2 Experiments and Hysteresis Characteristic of the DES
To verify above optimization criteria, we fabricated some types of DESs with the same protection layers made of Silbione LSR 4305 and same length of electrode area. The DES was mounted on a one-dimensional motorized platform and could be stretched at a specified speed, starting position, and ending position. The corresponding output voltages were recorded by interval of displacement 500 μm.
Some DESs were fabricated by using same materials and different width of electrode area. Relationship between deformation and output voltage of the DES is shown in Fig. 3(a). According to the Fig. 3(b), it can be concluded that the sensor sensitivity will be higher with boarder electrode width, and is also proportional to the electrode width.

(a) Relationship between deformation and output voltage of the DES (b) Sensitivity of the DES with different electrode width
Figure 4(a) shows similar characteristic of the DES with different thickness of dielectric layer. The thickness refers to the height set by the universal applicator, not the real thickness of DE membrane, but the two parameters are proportional [15]. According to the Fig. 4(b), it can be concluded, the thicker the dielectric layer, the higher the sensitivity will be. Sensitivity of the DES is roughly inversely proportional to the thickness of the dielectric layer.

(a) Relationship between deformation and output voltage of the DES (b) Sensitivity of the DES with different thickness of dielectric layer.
Figure 5 shows similar characteristic of the DES with different dielectric layer materials. Sylgard 186 (Dow Corning), Silbione LSR 4305 (Bluestar Silicones), and MED-4901 (NuSil) were chosen to fabricate the dielectric layer, and their sensitivities are 0.0079 V/mm, 0.0094 V/mm and 0.01 V/mm respectively.

Hysteresis loops of DESs with different materials of dielectric layer
The DESs have obvious hysteresis because of the inherit viscoelasticity of the dielectric material. The hysteresis loops of Sylgard 186, Silbione LSR 4305 and MED-4901 are shown in Fig. 5, and their maximum hysteresis are 1.34%, 0.86% and 0.79% respectively. Besides, if all points on the hysteresis loop were considered, the characteristic of MED-4901 is much better than Sylgard 186 and Silbione LSR 4305. Hysteresis will reduce precision of the DES directly, especially for dynamic measurement; therefore, MED-4901 is a suitable material to fabricate the dielectric layer among the three popular silicone materials.
According to the experiment results, sensitivity of the DES can be improved by increasing width of the electrode area, by decreasing thickness of the dielectric layer or by selecting suitable material with low hysteresis.
However, wider electrode area will make the DES and skin more difficult to fit well. Therefore, the better choice is to apply a thinner dielectric layer to fabricate the DES, and the thinner layer can make people more comfortable because of the lower rigidity. On the other hand, the material with lower hysteresis should be chosen to fabricate the dielectric layer, and the protection layer should have lower Young’s modulus and higher strength to make the DES softer and more reliable.
5 Measuring of Joint Angle by the DES
To validate the DES in measurement of joint rotation, the DES was mounted on the wrist by adhesive tape, as shown ass Fig. 6(a). When the wrist was bending, the sensor would be also stretching. Meanwhile, the joint angle could be obtained by photographing and then picture processing. The experiment results are shown in Fig. 6(b). The fitting straight line is y = 0.0017x + 0.5967, and R-Squared is 0.9682. The result indicates that the output voltage of the DES is positively related to the joint angle, therefore, the DES can be applied to measure the joint rotation.

(a) Experiment to measure the joint rotation by the DES (b) Relationship between the output voltage and the joint angle
6 Conclusion
To DES, a higher sensitivity also means greater discrimination that is expected to measure the joint rotation. Therefore, some optimization criteria were concluded to improve sensitivity and precision of the DES. Firstly, the wider the electrode area, the higher the sensitivity, but too wide DES will limit the fitting of skin and the DES, so, a suitable wider electrode area should be determined. Secondly, thinner dielectric layer can make higher sensitivity. Finally, the material with lower hysteresis should be chosen because the soft material has more obvious hysteresis.
In general, the dielectric layer should be fabricated by the material with lower hysteresis and should be as thinner as possible; to make the DES softer and keep the qualified strength, the protection layer should be fabricated by the material with lower Young’s modulus and enough strength. Other technologies also can be applied to improve precision of the DES, such as using high specification electrical components, filtering and shielding. When the DES was used to measure joint angle, the experiment results indicated that the output voltage of the DES is positively related to the joint angle, therefore, the DES is qualified to be applied to capture human joint rotation.
References
Goebl, W., Palmer, C.F.: Temporal control and hand movement efficiency in skilled music performance. PLoS ONE 8(1), 96–98 (2013)
Zhou, H., Stone, T., Hu, H., et al.: Use of multiple wearable inertial sensors in upper limb motion tracking. Med. Eng. Phys. 30(1), 123–133 (2008)
Zhou, H., Hu, H.F.: Inertial motion tracking of human arm movements in stroke rehabilitation. In: 2005 IEEE International Conference Mechatronics and Automation, vol. 3, pp. 1306–1311. IEEE (2005)
Mcgorry, R.W., Chang, C.C., Dempsey, P.G.F.: A technique for estimation of wrist angular displacement in radial/ulnar deviation and flexion/extension. Int. J. Ind. Ergon. 34(1), 21–29 (2004)
Kasahara, T., Mizushima, M., Shinohara, H., et al.: Simple and low-cost fabrication of flexible capacitive tactile sensors. Jpn. J. Appl. Phys. 50(1), 317–326 (2011)
Kim, D., Lee, C.H., Kim, B.C., et al.: Six-axis capacitive force/torque sensor based on dielectric elastomer. In: Proceedings of SPIE - The International Society for Optical Engineering, vol. 8687(3), 86872J (2013)
Böse, H., Fuß, E.F.: Novel dielectric elastomer sensors for compression load detection. In: Proceedings of SPIE - The International Society for Optical Engineering, vol. 9056, 905614 (2014)
Böse, H., Fuß, E., Lux, P.F.: Influence of design and material properties on the performance of dielectric elastomer compression sensors. In: Proceedings of SPIE - The International Society for Optical Engineering, vol. 9430, 943029 (2015)
Stretchsense Homepage. http://stretchsense.com. Accessed 31 May 2017
Jung, K., Kim, K.J., Choi, H.R.F.: A self-sensing dielectric elastomer actuator. Sens. Actuators A Phys. 143(2), 343–351 (2008)
Gisby, T.A., O’Brien, B.M., Anderson, I.A.F.: Self-sensing feedback for dielectric elastomer actuators. Appl. Phys. Lett. 102(19), 193703–193704 (2013)
Goulbourne, N.C., Son, S., Fox, J.W.F.: Self-sensing McKibben actuators using dielectric elastomer sensors. In: Proceedings of SPIE - The International Society for Optical Engineering, vol. 6524, 652414 (2007)
Matysek, M., Haus, H., Moessinger, H., et al.: Combined driving and sensing circuitry for dielectric elastomer actuators in mobile applications. In: Proceedings of SPIE - The International Society for Optical Engineering, vol. 7976(6), pp. 541–558 (2011)
O’Brien, B., Anderson, I., Calius, E.F.: Integrated extension sensor based on resistance and voltage measurement for a dielectric elastomer. In: Proceedings of SPIE - The International Society for Optical Engineering, vol. 6524(15), pp. 1–11 (2007)
Samuel, R., Araromi, O.A., Samuel, S., et al.: Fabrication process of silicone-based dielectric elastomer actuators. J. Visualized Exp. 108, e53423 (2016)
Araromi, O., Poulin, A., Rosset, S., et al.: Thin-film dielectric elastomer sensors to measure the contraction force of smooth muscle cells. In: Spie Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring. International Society for Optics and Photonics, vol. 9430, 94300Z (2015)
Araromi, O.A., Rosset, S., Shea, H.R.F.: High-resolution, large-area fabrication of compliant electrodes via laser ablation for robust, stretchable dielectric elastomer actuators and sensors. ACS Appl. Mater. Interfaces 7(32), 18046–18053 (2015)
Acknowledgments
This work was supported by the National Natural Science Foundation of China (Grant No. 91648106), the Natural Science Foundation of Shandong Province (Grant No. ZR2016EEM16) and the Foundation of State Key Laboratory of Mechanical Strength and Vibration (Grant No. SV2016-KF-13).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing AG
About this paper
Cite this paper
Mei, T., Ge, Y., Zhao, Z., Li, M., Zhao, J. (2017). Optimal Design and Experiments of a Wearable Silicone Strain Sensor. In: Huang, Y., Wu, H., Liu, H., Yin, Z. (eds) Intelligent Robotics and Applications. ICIRA 2017. Lecture Notes in Computer Science(), vol 10464. Springer, Cham. https://doi.org/10.1007/978-3-319-65298-6_13
Download citation
DOI: https://doi.org/10.1007/978-3-319-65298-6_13
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-65297-9
Online ISBN: 978-3-319-65298-6
eBook Packages: Computer ScienceComputer Science (R0)