
Abstract
There are a variety of methodologies to obtain seafloor sediment and rock samples, and deciding which one to use depends on the scientific question being addressed, the type of seafloor material being targeted, what the vessel can support and finally the cost. Nowadays, any type of seafloor can be sampled, no matter how soft or hard or inhospitable and technological advances, largely driven by the hydrocarbon industry, continuously allow us to go deeper and deeper into the sub-seafloor and, by definition, into geological time.
Access provided by CONRICYT-eBooks. Download chapter PDF
Similar content being viewed by others

1 Introduction
Marine sediments record the Earth’s history, its climate, the ocean currents, the ocean productivity, sea level changes, sea temperature changes, tectonic movements, environmental changes, evolution and ecology among other parameters. Therefore, it has always been important to be able to collect sediment cores as they offer us a window through geological time. The longer the sediment sample the longer the time record we can study. Nonetheless, not all research vessels can support long and heavy corers whose operation is more costly financially and timewise. There are many sampling devices each with advantages and disadvantages and it is important to choose the appropriate device depending on the research question. For example, there is no need to use a giant piston corer if the research question relates with the sediment-water interface. Users must always be aware of the research vessel capabilities, its cranes, winches and wires.
It is important to note that seafloor sampling and site selection need to be supported and guided by an acoustic pre-site survey, such as seafloor backscatter imaging (Chapter “Sidescan Sonar ”), bathymetric surveying (Chapter “Multibeam Echosounders ”) and high-resolution seismic profiling (Chapter “Reflection and Refraction Seismic Methods ”), in order to decide on the best location for coring, both for optimum sample retrieval but also for the safety of the instrument. It is also crucial to be aware that coring tends to oversample the top 10–15 m by about 30–35% (Széréméta et al. 2004).
2 Surface Sediment Sampling
2.1 Dredging
Dredging is a technique that has not changed much over the years. It is used to collect loose rocks that sit on the seafloor in order to understand the distribution and genetic processes of hard rocks that shape the seafloor morphology. Dredging uses a chain-link mesh bag with a metal-jawed opening, about 1 m wide, that gets dragged along the seafloor and collects the loose rocks in the bag. The dredge is lowered to the seafloor by a steel wire cable whose length needs to be significantly longer than the water depth to allow for the dragging on the seafloor operation. An anchor chain provides the necessary weight to keep the equipment on the seafloor during dredging.
2.2 Box Corer
This corer has been developed to take a 50–60 cm2 seafloor sample, down to a depth of 45–60 cm below the seafloor, depending on the set up. The corer consists of a gimballed sample box and spade assembly (Fig. 1), originally designed by Reineck (1963). Some box corers operate with one spade, others with two, but on the same principle. The sample box is covered by two flaps that remain open while the corer is descending, allowing the water to flow freely through. During descent the spade(s) is kept with a lock mechanism on the side of the sample box.

a Set up of box corer, ready for deployment onboard RV Maria S. Merian and b subsampling with core liners of a full box corer
The corer is lowered to the seafloor at a controlled speed until its frame rests on the seafloor. The sample box then sinks into the sediment under its own weight. As soon as the corer is pulled by its wire, a mechanism releases the spade that swings below the sample box, sealing the sediment in. At the same time the spring-loaded flaps above the sample box shut to prevent the sediment being disturbed during recovery. This technique is favoured when the seafloor is soft and when the seafloor surface needs to be retrieved undisturbed, however the penetration is shallow.
2.3 Grab Sampler
The grab sampler consists of two quadrant shaped jaws, a clamshell bucket, made of stainless steel mounted onto a frame (Fig. 2). Lead weights can be attached to the frame to allow the sampler better penetration depending on the sediment type. The grab sampler is lowered to the seafloor with the jaws open. A trigger mechanism releases the jaws when the sampler comes in contact with the seafloor. As soon as retrieval begins, the pull triggers the jaws to close and retrieve the sediment. This is one of the easiest sediment sampling techniques but it also causes the most disturbance. For this reason it is commonly used to retrieve rock samples, e.g. from volcanic environments.

Grab sampler being deployed from RV Urania
2.4 ROV Push Cores
The operation and practices of Remotely Operated Vehicles is addressed in Chapter “ROVs and AUVs”. Here we are only mentioning the ability to collect short push cores from carefully selected areas in real time as they are being imaged by video. Short cores, up to 30 cm in length can be pushed by the ROV arm into the seafloor (Fig. 3). The core is then retrieved and pushed into a rubber-ended lid to ensure maximum retrieval of sediment. There are certain disadvantages in using this technique, the corer is very short and a lot of material may be lost while securing the core onto the rubber-ended lid when the sediments are soft and particularly unconsolidated. The advantage is that this technique is ideal for ground-truthing bathymetry and backscatter data very fast and efficiently as the sampling location is selected by video and it can be clearly seen how representative of the extended area the sample is.

a The ROV Holland I of the Irish Marine Institute sampling with push cores and b retrieving sediment. Note that the distance between the small red laser dots is 10 cm
3 Shallow Sediment Coring
3.1 Gravity Corer
Gravity corers are usually chosen to collect cohesive soft sediments; therefore, this method is extensively used on the continental slope and in deeper basins. Thin sands encased in cohesive muddier sediments can also be retrieved with this method and so it is also often used on the continental shelf, albeit these cores may be shorter due to the friction generated by the sands on the corer lining. Its name demonstrates its mode of operation, lead weights attached to the top of the corer are used to lower it to the seafloor and drive it through (Fig. 4). The weight varies between 100 to 1000 kg but can sometimes exceed two tons; therefore, a powerful winch and wire are required to lower it to the seafloor. The corer is also fitted with stabilising fins to ensure that the corer penetrates the seabed in a straight line.

Deployment of a gravity corer from RV Maria S. Merian. The corer has just been manoeuvred out of the launch and recovery system (LARS)
Most commonly a 6 or 9 m set up is used, although multiple steel core barrels can be used to make the corer longer. Usually it is not recommended to exceed 15 m because of the weight that may cause the corer to buckle when it comes in contact with the seafloor. The barrel is fitted with a sharpened replaceable carbon steel core cutter to ensure minimal disturbance as the corer penetrates the seafloor. Sample loss on retrieval is minimised by a core catcher fitted inside the end of the barrel.
This method’s advantage is that there is little cost associated with it, it is simple, easy to use and requires little maintenance. However, it may cause compression to the sediments, especially near the top and in particular if the sediments are soft, due to the large weight on the top.
3.2 Piston Corer
The piston corer was invented in 1947 by Professor Borje Kullenberg (Kullenberg 1947) to allow the Swedish Deep Sea Expedition to take long (up to 24 m) samples of sediment from beneath the seafloor. Nowadays, together with the Gravity Corer, it is one of the more common shallow sediment sampling methods. The length can be adjusted by adding more barrels. The total barrel length is usually up to 24 m, but can be longer.
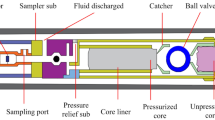
The piston corer consists of a tight-fitting piston inside the core barrel. The system requires a triggering mechanism, which will allow it to freefall from several meters above the seafloor. The role of the triggering device is usually performed by a short (1 m) gravity core, which is commonly called the trigger weight core. The trigger weight core hangs from a release arm (pelican) several meters below the base of the piston corer (Fig. 5). Several meters of wire are coiled between the pelican and the piston corer. Upon impact of the trigger weight core with the seafloor the triggering device releases the coiled wire and activates the free fall (Fig. 5). The piston corer uses its freefall kinetic energy and own weight to drive the core barrel into the seabed. As the barrel penetrates the seabed, the piston action reduces the effect of internal wall friction thus increasing seabed penetration and thereby permits the collection of long, relatively undisturbed sediment samples. A special valve may exist in the piston to allow the operator to select the maximum under-pressure required to prevent the PVC core liner from imploding. The length of the wire coiled in the pelican depends on the type of sediment being sampled, the water depth and the length of corer being used. Ideally the length of the wire is calculated so that the piston begins to move up the core barrel just ahead of the sediment. If it moves faster or slower it will cause sediment disturbance.

Steps in the deployment and operation of a piston corer from the set up through to triggering and retrieval (modified from GEO Marine Survey Systems b.v.)
The length of sediment recovered depends on the nature of the sediment being sampled. Generally soft sediments such as muds and clays are easier to penetrate, while water-saturated sands and foraminiferal oozes less so. When different types of sediments alternate, as is often the case in abyssal plains, the length of core recovery depends on the relative thicknesses of the “difficult” layers.
3.3 Kasten Corer
A kasten corer is a variation of the standard gravity coring. It was designed by Kögler (1963). The steel barrels are square-shaped, made of sheet metal, either 15 or 30 cm2, with a square core catcher attached to the nose of the barrel. No liner is used. A cutter section fitted to the end of the sample tube has two spring loaded flaps, which close when the Corer is withdrawn from the sediment. The sample tube is designed to be split to gain access to the sample. Square plastic boxes (usually up to 1 m long) must be pushed into the sediment to subsample the corer. Kasten corers are designed to retrieve large volumes of sediment. This is why this method is particularly favoured where specific target components are known to occur in low amounts, e.g. biogenic material. The maximum length for kasten cores is 15 m.
3.4 Vibrocorer
The vibrocorer has a vibrating mechanism, the vibrohead, which operates with hydraulic, pneumatic, mechanical or electrical power from an external source. The power source stays on the ship and the corer, which is often fixed to a rig that can firmly rest on the seabed (Fig. 6), is lowered to the seafloor while still being connected through cables with the power generator on the ship. The core barrel is driven into the sediment by the force of gravity, enhanced by the vibration energy. The vibration reduces friction and facilitates core penetration into the substrate. When the corer has penetrated fully into the sediment, the vibration is switched off and the barrel pulled and retrieved, with the core catcher at the nose of the barrel preventing the sediment from being lost.

a Vibrocorer on the deck of RV Celtic Explorer and b being prepared for deployment. In the foreground of b the umbilical cable can be clearly seen
Vibrocoring is the preferred technique when dealing with unconsolidated, heterogeneous sediments, such as compact sands and stiff clays or even unconsolidated chalk, but if the vibration force is high enough it is able to sample consolidated sediments too. It is also effective with glacial shelf sediments. However, due to the need for power connection the water depth to which this corer can be used is often limited. Disturbance to the sediment due to the vibration is limited to the few millimetres adjacent to the tube and the surface sediment that may be stirred up by the corer as it penetrates, but the centre of the core is usually intact.
3.5 Multi-corer and Mega Corer
When multiple samples are needed from the same location, a multi-corer or a mega corer are the most time-efficient ways to retrieve them. Multiple plastic tubes are fixed to a tubular frame with a sampling head attached to it by a hydraulic damper (Fig. 7). Lead weights attached to the head allows for regulation of the depth of samples taken. The corer is slowly lowered until it rests on the seafloor. The core tubes penetrate the sediment under the force of gravity but at a controlled rate regulated by the hydraulic damper and the lead weight on the head. A series of spring-loaded arms swing under the tubes to seal the sediment in and plug the top of the tubes to prevent disturbance when the corer is pulled for retrieval (like the hammer spade in the box corer).

Megacorer set up with nine sampling tubes has just been retrieved on RRS James Cook
This method is preferred when multiple samples are needed from the same site but also when the sediment-water interface needs to be sampled as this is the most efficient method of retrieving it.
3.6 Giant Piston Corer and the CALYPSO Corer
The Giant piston corer was designed by Hollister et al. (1973) to obtain long piston cores from large water depths (5000 m). The length that can be achieved is usually 30–40 m. The device is not much different to the conventional piston corer with only a few modifications to its diameter (14 cm outside, 11.5 cm inner diameter), larger weights (up to 6 tons) and, most notably, a parachute to control the speed of penetration and avoid over-penetrating and compressing the sediments.
The CALYPSO piston corer, is a giant piston corer that was developed onboard R/V Marion Dufresne and is used to collect even longer cores, up to 75 m in length at full ocean depth. The corer is deployed using a specially made wire that prevents it from rotating and is weightless in the water (Aramide cable). It can be triggered using either a counter weight similar to the trigger weight core as described above for the conventional piston corer or by using a programmable acoustic release, both of which enable the corer to freefall.
4 Seafloor Drilling
Most seafloor shaping processes last for long periods, in the order of thousands to millions of years, whether volcanic or sedimentary. Marine geomorphologists ideally prefer to have access to a longer record in order to understand the present-day seafloor morphology and to that vein techniques that drill into the seafloor and generate longer and continuous records of samples are commonly pursued. However, seafloor drilling is a technologically demanding, difficult and expensive activity and therefore not easily employed. The oil and gas industry operations produce samples that are ideal for use in marine geomorphology and frequently this data is made available to researchers. Correspondingly, the International Ocean Discovery Programme (IODP) provides similar datasets, but the actual operation takes many years of planning. There are other seafloor drills, such as the FUGRO seafloor drill and the MARUM MeBo, that have shallower sub-seafloor reach but that are more flexible and mobile than the oil and gas industry or the IODP and consequently easier to use. Below are descriptions of the operations of these three types of drilling techniques. Other seafloor drills are available but not described here as they operate at similar principles.
4.1 Oil and Gas Industry Operations
Offshore drilling has had to adapt to considerably challenging environments of variable water depths ranging from relatively shallow water on the continental shelf to deep water slopes and ultra-deep water basins. This has resulted in the development of three main types of drilling rigs, each one appropriate for different water depths and specific local conditions (geology, weather). Based on operation those three types are Jack-up rigs, semi-submersibles and drillships.
Jack-up rigs are the most commonly used worldwide. They operate in shallow water depths, up to 150 m, and preferably on a firm seafloor. The rig is floated into position and three or four legs are lowered and penetrate the seafloor for stability. Jack-ups are self-elevating and stand clear of the highwater level. In deeper water depths (up to 500 m) or unstable seafloor a semi-submersible rig is used, which is a mobile and floating rig, with a platform on a submerged framework kept buoyant with ballasted columns and watertight pontoons that sit about 20 m below the water surface and below fairweather wave base, providing some relative stability. Mooring lines anchored to the seafloor and dynamic positioning keep the rig in position. In fact dynamic positioning can in some cases completely replace anchored moorings. Finally, for deeper water locations, drillships have been constructed, which could be used in water depths in excess of 3500 m. These can work in any water depth apart from very shallow water. They are ship-shaped and this allows them total mobility and can be mobilised globally to even the remotest areas. However, they are particularly affected by weather conditions. Other rig types include drill barges, tender-assist rigs, compliant towers, platform rigs and Spar rigs. The deepest floating rig is the Perdido Spar in the Gulf of Mexico at a water depth of about 2450 m operated by Shell Oil.
When discoveries are made temporary exploratory wells reveal shows and serve also to assess the quality of the hydrocarbon before proceeding to the drilling of a production well. Exploratory wells that find oil or gas where neither has been found before are called wild cats. If a well strikes oil or gas it is called discovery well. Step-out or appraisal wells are drilled either to determine the limits of a field following discovery or to explore for other reservoirs in the vicinity of known fields. When a well is unsuccessful in finding oil or gas it is called a dry well.
The most common drilling technique is rotary drilling where a drill bit is screwed to the end of a drill string, which is made of a set of drill pipes (about 9 m long each). The drill bit attached to the drill string is lowered through the water until it reaches the seafloor. A hole in commenced, or spudded, with the rotary steel-toothed or diamond-studded bit. Cooling, cleaning and pressure stabilisation is achieved by using a drilling fluid, which is pumped through the drill pipe and out through the drill bit and back up the hole to the mud pits on the drilling rig, before it gets recirculated. The drilling fluid may be a mixture of sea water, clay such as barite and bentonite, and other chemicals. The initial hole is usually 36 in. in diameter. Each time the bit drills the equivalent of one pipe length, drilling stops for another joint of pipe to be added to the drill string (making a connection). The hole needs to be cased to prevent collapse or caving. Casing is achieved by cementing a steel pipe to the rock wall of the hole. A smaller diameter hole can then be drilled from the base of the first hole, which will also be cased by cementing steel pipes to the hole walls but also the larger diameter hole above it and so on. The hole keeps getting lengthened this way with ever narrower diameter. Wireline logging is performed before the casing is cemented to the walls. Sitting on the seafloor and connected to the top of the hole is the “blow-out preventer” (BOP), which consists of a series of pipes and valves to prevent the sudden rush of fluid or gas to the seafloor in case overpressurised oil or gas are unexpectedly encountered.
Other drilling methods include percussion drilling which involves crushing the rock by raising and dropping a heavy chisel bit, rotary percussion drilling which is a combination method that uses a rotary drill that also pounds into the rocks, sonic (vibratory) drilling which uses a sonic drill that generates high frequency resonant vibrations that cause magnification of the amplitude of the drill bit and fluidisation of particles, and directional drilling which is rotary drilling but directed along a curved path as the hole deepens. For further information, the reader is directed to more dedicated books and publications, such as Tanaka et al. (2005), Devold (2009), Offshore Operations Subgroup (2011) and a plethora of websites (e.g. http://www.petroleumonline.com/ and http://www.slb.com/services/drilling.aspx).
4.2 International Ocean Discovery Program
Benefiting from the technology developed by the oil and gas industry, and particularly dynamic positioning which can keep vessels on target in strong currents, scientific deep sea drilling became possible. Originally called the Deep Sea Drilling Project (DSDP), it started in 1966, using the Drilling Vessel Glomar Challenger. In 1985 it became the Ocean Drilling Program (ODP) when the Glomar Challenger was decommissioned and replaced by the JOIDES Resolution. The Integrated Ocean Drilling Program (IODP) continued using a refurbished JOIDES Resolution and the Japanese Deep Sea Drilling Vessel Chikyu (Japanese for Planet Earth). In addition, a third component, so called Mission Specific Platforms, were added for settings, where none of the above mentioned drill ships can operate (e.g., ice-covered regions and very shallow water conditions) (Fig. 8). As of 2013 the Integrated Ocean Drilling Program continues under the new collaboration of the International Ocean Discovery Program (IODP) (Fig. 9).

IODP uses multiple drilling platforms, but most commonly a the riser-less JOIDES Resolution, image taken from http://iodp.tamu.edu, Photo Credit William Crawford, IODP-JRSO b the riser vessel Chikyu, photo courtesy of JAMSTEC; CC BY-NC 4.0, c Mission-Specific Platforms chosen for the specific conditions of the expedition; pictured here is the ice breaker Vidar Viking from the Arctic Coring Expedition (ACEX), 2004 (photo Martin Jakobsson © ECORD/IODP)

Global map of the distribution of boreholes from all four phases of the international marine research drilling programme, legs 1–369. Map taken from https://iodp.tamu.edu/scienceops/maps.html
IODP uses multiple drilling platforms to access different sub-seafloor environments during research expeditions. Their website is a very valuable source of information and details on the tools and techniques they use (http://iodp.tamu.edu/tools/index.html). The JOIDES Resolution has riser-less drilling technology, which uses seawater as the primary drilling fluid, pumped into the drillpipe. The role of the seawater is to cool and clean the drill bit as well as deliver cuttings out of the hole to a cone on the vessel. On the other hand, Chikyu operates with riser technology. It uses an outer casing that surrounds the drill pipe, which provides return circulation of engineered drilling fluid maintaining the pressure in the hole at an equilibrium. At the same time cuttings are removed and the drill hole is cleaned allowing for deeper drilling. A blowout preventer (BOP) protects from overpressure build-up. A tall metal drilling rig allows to conduct rotary drilling with the Rotary Core Barrel, which is the oldest and most basic technique and is used to retrieve medium to hard lithified sediments and crystalline rock cores.
Other coring techniques include the Hydraulic Piston Corer (HPC) and the Advanced Piston Corer (APC), which are push-type, no rotation involved and use hydraulic actuated piston coring (http://iodp.tamu.edu/tools/index.html). This technique is ideal for climate and palaeoceanographic studies as it retrieves the least disturbed sediments but on the downside, it is limited to the upper 200 m. The Half-Length APC (HLAPC) is a shorter version of the APC and is used to recover high-quality, high-resolution cores from short intervals of soft sediments between harder layers, such as oozes, between chert layers. For the recovery of deeper but more consolidated sediments the Extended Core Barrel (XCB) can be used. It is usually deployed when the sediments are too stiff for the piston corer but too soft for the RCB. It is interchangeable with the HPC and APC, depending on the sediments encountered. The operation of the XCB uses rotation of the drill string to advance the hole while the cutting shoe trims the sample.
IODP holes can be re-entered at a later stage with technologies such as the Free-Fall Funnel (FFF) and the Reentry Cone and Casing (RECC), the latter being a permanent seafloor installation. The RECC allows multiple visits to the same hole deepening it or installing permanent/long-term downhole measuring and sampling.
Apart from the core retrieval, downhole logging typically takes place in an IODP hole, which includes standard wireline logging (i.e. porosity, litho-density, natural gamma ray, enhanced digital telemetry, resistivity imaging, magnetic susceptibility, sonic imaging, microscanning, inclinometry and borehole seismic) and downhole memory measurements (temperature of rocks and sediments, pressure in soft sediments, magnetic orientation, etc.). Downhole logging can either be performed after drilling, lowering the logging tools through the open hole, which is the conventional method, or while drilling (Logging While Drilling—LWD), allowing real time data feedback. The latter is preferred when hole conditions are expected to be unsuitable for conventional wireline logging.
4.3 Seafloor Drill Rigs
Access to IODP vessels is limited and requires many years of planning, while other drill ships are expensive. An intermediate coring technique, bridging the gap between IODP and the standard coring tools described above, are seafloor drill rigs. There is a variety of seafloor drills operational in the world, used commercially and academically. A seafloor drill is lowered onto the seafloor from a purpose-built research vessel on an umbilical cable that provides control, communications, power and hoist capability. It may have a single core barrel that can drill to a depth of 5 m or may be equipped with a drill-pipe magazine that can take multiple barrels which allows to drill to greater depths by attaching extension pipes to the drill string (Freudenthal and Wefer 2013).
Commercial seafloor drills include the Fugro Seafloor Drill that can retrieve samples up to 150 m below the seafloor at water depths up to 4000 m, the Portable Remotely Operated Drill (PROD) that can operate at waterdepths of 3000 m and retrieve more than 130 m of core and the Underwater Seafloor Drilling Rig (USDR) that has no water depth limit of operation (Sheshtawy 2007), amongst many others.
The British Geological Survey (BGS) rockdrill can retrieve up to 50 m of core at water depths up to 3000 m, which originally could only retrieve 5 m when it was initially conceived in 1982 (Wilson 2006). Development was and still is continuous with updates in software, camera, cable and connectors technologies, but also in progressing from a single barrel to a multi-barrel operation (Wilson 2006). BGS also operate an orientated rockdrill, which can be deployed at 4500 m water depth and which allows for cores to be orientated with reference to a compass heading and thus it is used in palaeomagnetic analysis (Wilson 2006).
MeBo (Meeresborden-Bohrgerät) (Fig. 10a) was developed by Marum, the Centre for Marine Environmental Sciences of the University of Bremen, Germany (Freudenthal and Wefer 2006, 2007, 2013) and can drill cores up to 80 m deep in unconsolidated sediments and in hard rocks at water depths up to 2000 m. The drill rig is powered by four hydraulic pumps. MeBo combines rotary and push operation; the drill head is mounted on a guide that moves up and down that generates a maximum push force of 4 tons. Seawater is pumped through the drill string to cool and clean the drill bit from cuttings. Barrels are taken off the magazine and threaded to the drill head as drilling progresses (Fig. 10b). Every three meters of sampling the barrel gets stored together with the drilled core in the magazine and the next empty barrel is lowered to the drill hole and attached to the drill head, a 3 m rod is added and drilling continues.

a Deployment of MeBo from RV Meteor and b schematic of MeBo parts and operation
The MeBo 200 is the latest development of this tool. It can recover cores up to 200 m length.
5 Core Handling
Users need to be aware that improper handling or faults in the design of the coring device may result in severely disturbed and unrepresentative samples. The most common and most severe problems that may arise are (1) loss of surface sediment (the seafloor), (2) redistribution and resuspension of enclosed sediment (running along the core liner), and (3) repenetration (bounce of the device after penetrating partially and then repenetrating in same location) (Blomqvist 1991). Other problems may arise from compaction of layers and shortening, particularly towards the base of the core, or extension and sediment stretching near the top of the core (Skinner and McCave 2003; Széréméta et al. 2004).
When cores are retrieved on deck they are labelled and cut into 1–1.5 m sections to make transportation and handing easier. Soft sediment cores are stored in fridges kept at 4 ℃ temperature, simulating deep sea temperatures, in order to maintain their moisture and chemistry. To analyse the sediment, cores are split into two halves, one is labelled “Working” and is used for sampling and the other is labelled “Archive” (Fig. 11) and is kept intact for posterity.

Split piston core, way up towards the top left corner. One half will be archived and the other half will be used for logging and sampling
Multiple analyses can then be performed on the working half, starting with non-destructive methods, such as physical properties logging (Multi-Sensor Core Logger) and elemental composition scanning (ITRAX) (e.g. Georgiopoulou et al. 2012). Destructive methods that require subsampling need to be performed last and modestly so as not to oversample the core.
References
Blomqvist S (1991) Quantitative sampling of soft-bottom sediments: problems and solutions. Mar Ecol Prog Ser 72:295–304
Devold H (2009) Oil and gas production handbook: an introduction to oil and gas production. ABB ATAP Oil and Gas, Oslo, pp 116
Freudenthal T, Wefer G (2006) The sea-floor drill rig “MeBo”: robotic retrieval of marine sediment cores. Pages News 14(1):10
Freudenthal T, Wefer G (2007) Scientific drilling with the sea floor drill rig MeBo. Sci Dril 5:63–66
Freudenthal T, Wefer G (2013) Drilling cores on the sea floor with the remote-controlled sea floor drilling rig MeBo. Geosci Instr Meth Data Syst 2:329–337
Georgiopoulou A, Benetti S, Shannon PM, Haughton PDW, McCarron S (2012) Gravity flow deposits in the deep Rockall Trough, Northeast Atlantic. In: Yamada Y‚ Kawamura K, Ikehara K, Ogawa Y‚ Mosher D‚ Chaytor J, Strasser M (eds) Advances in natural and technological hazards research, submarine mass movements and their consequences, 4th edn. Springer‚ pp 695–707
Hollister CD, Silva AJ, Driscoll A (1973) A giant piston-corer. Ocean Eng 2:159–168
Kögler F-C (1963) Das kastenlot. Meyniana 13:1–7
Kullenberg B (1947) The piston core sampler. Svenska Hydrografisjc-Biologiska Kommissionens skrifter, Tredje Serien: Hydrografi, Band 1, Hafte 2, p 46
Offshore Operations Subgroup of the Operations & Environment Task Group (2011) Subsea drilling, well operations and completions. paper #2–11, Working Document of the NPC North American Resource Development Study, p 45
Reineck HE (1963) Der Kastengreifer. Natur und Museum. vol 93. pp 102–108
Skinner LC, McCave IN (2003) Analysis and modelling of gravity- and piston coring based on soil mechanics. Mar Geol 199:181–2004
Széréméta N, Bassinot F, Balut Y, Labeyrie L, Pagel M (2004) Oversampling of sedimentary series collected by giant piston corer: evidence and corrections based on 3.5-kHz chirp profiles. Paleoceanography 19:PA1005
Sheshtawy A (2007) Underwater seafloor drilling rig. american association of drilling engineers national technical conference and exhibition, Texas, AADE-07-NTCE-30, 10–12 Apr 2007
Tanaka S, Okada Y, Ichikawa Y (2005) Offshore drilling and production equipment, in civil engineering. In: Kiyoshi Horikawa, Qizhong Guo (eds) in encyclopedia of life support systems (EOLSS). Developed under the Auspices of the UNESCO, Eolss Publishers, Oxford, UK, (http://www.eolss.net)
Wilson M (2006) Drilling at sea. Earthwise Br Geol Surv 23:32–33
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer International Publishing AG
About this chapter
Cite this chapter
Georgiopoulou, A. (2018). Seafloor Sediment and Rock Sampling. In: Micallef, A., Krastel, S., Savini, A. (eds) Submarine Geomorphology. Springer Geology. Springer, Cham. https://doi.org/10.1007/978-3-319-57852-1_6
Download citation
DOI: https://doi.org/10.1007/978-3-319-57852-1_6
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-57851-4
Online ISBN: 978-3-319-57852-1
eBook Packages: Earth and Environmental ScienceEarth and Environmental Science (R0)