
Abstract
Seismic reflection and refraction methods are routinely used to illuminate sub-seafloor geological relationships, thereby providing a means to investigate a wide range of Earth processes that influence submarine geomorphology. Since the birth of seismic methods for exploration of ore bodies and petroleum in the early part of the 20th century, progressive technological advancements have ensured that the seismic method remains a fundamental geophysical tool in both the oil and gas industry and scientific research. For both marine seismic reflection and refraction methods, the primary principles are based around the notion of sending artificially-generated sound waves downward into the Earth and recording the energy that returns to recording instruments (receivers). In the case of seismic reflection, the down-going wavefield reflects off geological boundaries characterized by density and velocity contrasts before being recorded by an array of receivers. In seismic refraction experiments, the notion is to record energy that has been refracted at multiple geological boundaries before, ultimately, being refracted at a critical angle and then returning to receivers on the seafloor. Survey designs for both methods are many and varied, ranging from relatively simple two-dimensional surveys, to multi-azimuth three-dimensional surveys that illuminate the subsurface from different directions. Although the state of the art in seismic methods is continually evolving, this chapter gives some examples of modern and developing trends that are relevant to investigations into submarine geomorphology. Examples include high-resolution 3D seismic imaging, high-frequency sub-bottom profiling, waveform inversion and deep-towed seismic acquisition. The strength of the seismic reflection method lies in its ability to gain insight into structural and stratigraphic relationships beneath the seafloor, as well as in investigating fluid flow processes. The refraction method, on the other hand, is often used as the tool of choice for crustal-scale investigations into deeply-rooted geological processes that shape the seafloor, such as plate tectonics and volcanism. As with all scientific methods, seismic methods are most powerful when combined with complementary geophysical, geological or geochemical methods to address a common Earth science question.
Access provided by CONRICYT-eBooks. Download chapter PDF
Similar content being viewed by others


Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 History of Seismic Methods
The marine seismic method involves the generation and recording of sound waves that reflect and refract as they interact with geological boundaries beneath the seafloor. The methods can therefore be divided into reflection and refraction seismic methods. A brief history of these methods is given here; a more thorough discussion can be found in Sheriff and Geldart (1995) and references therein.
Seismic waves reflected and refracted from geological boundaries were first noticed on recordings of waves produced by earthquakes. The use of controlled-source (i.e. not earthquake source) seismology to explore subsurface geology grew mainly out of commercial endeavors, in particular petroleum exploration. In 1924, the seismic refraction method was used by the company Seismos (founded by the German mine surveyor Ludger Mintrop) to make what is generally believed to be the first seismic hydrocarbon discovery.
The Canadian Reginald Fessender was the first to propose the use of seismic reflections for finding ore bodies, in a U.S. patent he submitted in 1914. In 1919, the American geophysicist John Clarence Karcher applied for patents in reflection seismology and later co-founded a geological engineering company that conducted field tests in Oklahoma. In 1925, Karcher and Everette Lee DeGolyer formed a company called Geophysical Research Corporation (GRC) and acquired Fessenden’s patent. A few years later, one of the exploration parties working under GRC used the reflection method to find a geological structure that was drilled in 1928 to produce oil—the first successful application of the method for petroleum production. By 1930, the reflection method had begun to take over from the refraction method as the standard for oil and gas exploration.
A major advancement in seismic methods was made in the 1950s, with W. Harry Mayne’s invention of common mid-point (CMP) stacking, which dramatically improved signal to noise ratios in the data. The principle of CMP stacking is introduced later in this chapter. The arrival of digital technology in the 1960s represented a revolution for seismic methods, as seismic data collection, storage and processing were all optimized. Another revolution, in the late 1960s and early 1970s, was the advent of three-dimensional (3D) seismic acquisition and processing; until that time, seismic surveys had been designed as two-dimensional (2D) profiles. Today, 3D surveying is the norm in the oil and gas industry, and is also widely adopted for academic research. However, 2D reflection and refraction surveys are still widely carried out for both regional and small-scale geological investigations, particularly in academic research.
2 Physical Principles
2.1 Basic Principles of the Seismic Reflection Method
The general principle of the seismic reflection method is that artificially-generated compressional seismic waves (known as P-waves) travel downward into the Earth, where they reflect off geological boundaries and then travel back to the surface to be recorded. In the marine environment, the seismic waves are usually generated behind a vessel from a controlled seismic source towed just below the sea surface (Fig. 1a). Reflected energy from these waves is recorded by receivers that are towed behind the source in a single cable or multiple cables. The recorded data are referred to as a shot record. By collecting lots of shot records at different locations, a seismic dataset is generated that is then processed to generate seismic images that reveal the nature of subsurface geology, including features like lithological boundaries, unconformities and faults (Fig. 1b). The vertical axes of seismic images are usually given in two-way travel time (s), rather than depth (m), since the reflections are recorded as the time it takes for the waves to travel from the source, down to the reflector, and back up to the receiver array. If the sub-surface seismic velocities can be adequately approximated, it is often appropriate to use these velocities to convert the sections from two-way time to depth, making them more intuitive for geological interpretation.

a Schematic illustration of the seismic reflection method. Yellow dot behind the vessel is the seismic source. Yellow arcs represent propagation of seismic wave energy through the water column. Black lines are selected seismic ray paths that reflect off the seafloor and sub-seafloor layer boundaries. Cyan dots are sound receivers towed within a cable (red line) behind the vessel. b Example seismic image from the Chatham Rise, offshore New Zealand (data processed by Geotrace 2010). Purple arrow seafloor reflection; yellow arrow unconformity; red arrow strong reflection from bedrock; black lines faults. c The reflection coefficient (RC) of a geological interface is defined by the acoustic impedance (Z) of the layers above and below the interface
The first strong reflection in a marine seismic survey comes from the seafloor,Footnote 1 where there is a contrast in the physical properties of the water column above and the seafloor sediment below (Fig. 1b). This physical property contrast is known as an acoustic impedance contrast; each medium has its own acoustic impedance (Z), which is the product of the medium’s inherent P-wave velocity (Vp) and density (ρ). The greater the acoustic impedance contrast, the more reflective is an interface between two layers. This reflectivity is represented by the reflection coefficient ‘RC’, which is defined at the interface between two layers as the ratio of the difference in the layers’ acoustic impedance to the sum of the layers’ acoustic impedance (Fig. 1c). The seafloor typically creates clear, well-defined seismic reflections due to the pronounced density contrast between water and sediment. Many other reflections (some strong, some weak) are also recorded after the seafloor, due to velocity and density contrasts inherent in sub-seafloor sequences of stratified sediments and underlying bedrock (e.g. Fig. 1b).
The depth to which one can ‘see’ seismic reflections beneath the seafloor depends on the penetration of the seismic signal, which is a function of the energy of the source and the physical nature of the geological media through which it travels. For example, layer boundaries with high reflection coefficients, such as a boundary between soft sediments and hard bedrock (Fig. 1b), will reflect much of the seismic energy and transmit only a small amount to greater depths.
The recoverable vertical resolution of reflections in a survey is a function of the frequency of the source. A general rule of thumb is that reflectors spaced vertically more than ¼ of a wavelength apart will be distinguishable (Sheriff and Geldart 1995). Thus, higher frequencies, which result in shorter wavelengths for a given seismic velocity (i.e. \(v = f\lambda\)), result in higher vertical seismic resolution. The seismic image in Fig. 1b has a dominant frequency of ~40 Hz, which means that just beneath the seafloor, where seismic velocities are approximately 1500 ms−1 or slightly higher, the maximum vertical resolution is ~10 m. Higher-frequency sources such as Boomer systems that operate at ~1 kHz can deliver vertical resolutions of less than 1 m (e.g. Müller et al. 2002).
2.2 Basic Principles of the Seismic Refraction Method
In contrast to the reflection seismic approach, refraction studies in academia are most commonly used to investigate large scale layering of the lithosphere’s crust and mantle. Subsequent to data acquisition and processing, refraction studies involve forward and/or inverse data modeling to gain information on layer thickness and velocity.
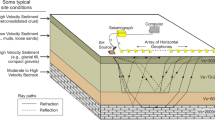
The same basic physical principles of the seismic reflection method also apply to the seismic refraction method, where artificially-generated seismic waves propagate into the Earth and spread out as hemispherical wave fronts (Fig. 2a). The concept of a ray path, which trends perpendicular to the wave front, is used to describe the subsurface propagation of a wave. The wave returns to the surface by refraction at subsurface interfaces, which are characterized by an acoustic impedance contrast. The seismic signal is recorded by receivers that are placed on the seafloor at distances from the source that may reach ten times the depth of seismic energy penetration, which depending on the source and physical properties and heterogeneity of the subsurface, may be up to 30–40 km. Each receiver collects a record section of all shots fired along the profile. The horizontal axes of record sections usually display the shot’s offset from the receiver, resulting in negative and positive offsets around the central zero offset where the receiver is located. The vertical axes are usually given in reduced time, i.e. travel time minus distance divided by a pre-selected velocity value (e.g. 8000 ms−1), resulting in a data display where refraction arrivals with a P-wave velocity corresponding to the pre-selected velocity value will be horizontal in the travel-time diagram.

a Schematic illustration of the seismic refraction method. Yellow dot behind the vessel is the seismic source. Yellow arcs represent propagation of seismic wave energy through the water column. Black lines are selected seismic ray paths that are critically refracted at the seafloor and sub-seafloor layer boundaries. Cyan dots are sound receivers on the seafloor. a (inset) Enlargement of raypaths at a layer boundary, where ‘v 1 ’ and ‘v 2 ’ are the velocities of the upper and lower layers, respectively, and ‘i’ and ‘t’ are the incidence and transmission angles, respectively. b Example seismic velocity profile after modeling. This velocity profile comes from an area near the Java forearc basin
When seismic waves encounter a positive impedance contrast at a lithological contact between two rock types, the incident ray will be reflected (see Sect. 2.1) as well as transmitted into the lower medium. A transmitted wave through the lower medium is termed a diving wave. The angle of transmission (t) is related to the angle of incidence (i) through the compressional velocity ratio between the upper and lower medium (i.e. v 1/v 2) following Snell’s law (Fig. 2a—inset). When the angle of incidence reaches the critical angle i c , the angle of transmission is 90. The critical angle is defined by the inverse sine of v 1/v 2. The critically refracted wave then travels along the velocity interface at the velocity of the lower medium (i.e. v 2) and is continually refracting energy back into the upper medium at an exit angle equal to i c . The resulting wave front is called a head wave, which provides constraints on the velocity boundary depth, like the Moho depth for example. It should be noted that an increase of seismic velocity with depth is a pre-requisite for a critically refracted wave. A velocity inversion will not generate a critical refraction and hence information from this ‘hidden’ layer is not recorded as the refracted rays are bent towards the normal (e.g. Banerjee and Gupta 1975).
In marine refraction studies, shots from a controlled seismic source are generated at equidistant intervals, which are commonly larger than shot intervals in reflection studies on account of the longer ray paths required for refracted arrivals. Hence, data acquisition for reflection and refraction seismic studies usually cannot be conducted simultaneously, but must be performed independently (Kopp et al. 2002). Due to the wide-angle geometry of refracted waves, acoustic wave generation by a controlled source should be extended to offsets beyond the seafloor receiver transect in order to capture the entire wave field. The vertical resolution of seismic refraction studies is about 10–20% of the depth, while the lateral resolution is about half the receiver spacing on the seafloor. An example velocity model derived from a seismic refraction survey is given in Fig. 2b.
3 Survey Design and Processing
3.1 Seismic Reflection Surveys
3.1.1 Types of Marine Seismic Reflection Surveys
Marine seismic reflection surveys can be designed to produce 2D seismic sections (like the section in Fig. 1b) or 3D seismic volumes. For 3D data, the recent advent of multi-azimuth and wide-azimuth surveys has improved subsurface imaging in challenging geological environments, like beneath salt structures (Michell et al. 2006). 3D surveys that are repeated over time are known as 4D surveys, since they incorporate the extra dimension of time. Such surveys are used, for example, to monitor the progress of a reservoir during production (Fayemendy et al. 2012), or the sequestration of CO2 into the subsurface (Chadwick et al. 2009). In this section, we provide a brief summary of fundamentals of acquisition and processing of seismic reflection data.
3.1.2 The Seismic Source
By far the most commonly used marine seismic source is the airgun, which, in essence, is a chamber of compressed air that is rapidly released into the water column as a bubble to generate an acoustic pulse (Parkes and Hatton 1986). A common type of airgun used in academic seismic reflection surveys is the GI Airgun, or Mini GI Airgun, where ‘GI’ stands for generator–injector. The principle is that the gun first fires compressed air from the primary chamber (generator) to produce the primary pulse, and then moments later fires from a secondary chamber (injector) to inject a pulse of air into the bubble near its maximum expansion. This second pulse dampens undesirable secondary energy produced during expansion and collapse of the bubble.
A range of other marine seismic sources exist, including implosive sources such as water guns and Boomer systems, and sparker systems that generate a source upon discharge of a large capacitor between two electrodes. Boomers and sparkers, for example, are commonly used for very high-resolution imaging of shallow sub-seafloor targets.
Marine vibrator-type sources are currently being developed in order to minimize the impact of seismic surveying on marine mammals (Pramik 2013). These sources, however, are still in a prototype phase.
3.1.3 Receiver Arrays
The receivers used to record the reflected energy in marine seismic experiments are called hydrophones, which are towed behind a vessel in cables called streamers. The hydrophones detect and measure pressure fluctuations in the water caused by the reflected sound waves.
In a 2D survey, a single streamer is towed behind the vessel (Fig. 1a). For oil and gas exploration, streamers are often as long as ~10 km to provide a large range of source-receiver offsets that are useful for multiple attenuation and seismic inversion—processes routinely carried out when exploring for oil and gas. Academic surveys often use much shorter streamers.
Receiver arrays used for 3D surveys are based on the principle of towing multiple streamers parallel to each other. In this way, multiple, closely-spaced subsurface lines can be acquired by a single sail line. 3D receiver arrays take on many different shapes and sizes, ranging from those designed to cover relatively small areas at high-resolution (e.g. array widths of ~100 m—Petersen et al. 2010) to large industry projectsFootnote 2 where arrays can be more than 1 km across.
3.1.4 Recording Parameters
The amount and resolution of data recorded for both 2D and 3D seismic surveys depends on a range of recording parameters. These include the spacing between successive shots, the recording duration for each shot, and the sample rate during recording—i.e. how often a sample of the wavefield is recorded (e.g. every 2 ms). High-resolution surveys typically have relatively close spacing between shots, high sampling rates and short record lengths, while lower-resolution, deep-penetration surveys have sparser shot spacing and longer record lengths. Along with the selection of a source type and receiver array, these parameters need to be carefully considered during the design phase of a survey to ensure that the subsurface targets will be adequately imaged.
3.1.5 Basic Processing Steps
Seismic processing methodologies can be highly-specialized and variable, depending on the desired output product from the data. Methods are also constantly evolving to improve imaging and inversion for physical properties. Here, we give a succinct summary of some fundamental steps involved in conventional image-based processing. Readers seeking more information on processing techniques are directed toward Yilmaz (2001) and Robertsson et al. (2015).
Deconvolution and filtering are early stage processes that are used to improve the temporal resolution and signal-to-noise ratio of seismic data. These processes are usually applied to the raw field data of each shot in the survey.
Geometry processing and CMP stacking involves defining all locations of shots and receivers in a survey, and assigning common midpoints (CMPs) between shot-receiver pairs. CMPs are geographic locations in the subsurface that will have been sampled numerous times by different shot-receiver pairs (Fig. 3). The shot-domain data (as collected in the field) can then be re-sorted into CMP gathers that have samples of the reflected seismic wavefield from different shots and receivers that originate from approximately the same geographic location. Using an understanding of sub-surface velocities, traces within a CMP gather are then stacked together to create just one representative vertical trace for a given location. Many CMP traces plotted next to each other produce a stacked seismic section.

Schematic illustration of combining different source-receiver pairs into a single CMP gather. Four successive shots are shown from top to bottom (Shots 1–4—yellow dots). For each shot, reflected energy is recorded in the four hydrophones (cyan dots). CMPs are the numbered green dots on the seafloor. The broken yellow line highlights CMP 4, which is sampled by each of the four shots over a range of source-receiver offsets (i.e. the blue lines showing ray paths.)
Seismic migration, typically the last major stage in a conventional reflection processing workflow, is the process of moving dipping reflections to their true sub-surface locations and collapsing diffractions (Yilmaz 2001). The result is a sub-surface image like that shown in Fig. 1b. In modern seismic processing, migration routines are commonly carried out prior to stacking, either in the time domain, or, in the case of pronounced lateral velocity variations, in the depth domain. The image in Fig. 1b was generated by pre-stack time migration.
3.2 Seismic Refraction Surveys
3.2.1 Acquisition Geometries
Analogous to seismic reflection surveys, marine refraction studies may be conducted in a 2D or 3D geometry using receivers placed on the seafloor. 4D surveys are repeated recordings to monitor subsurface changes in space and time. 2D surveys are commonly laid out normal to the geological structure of interest, whereas 3D studies result in a data cube or volume (e.g. Westbrook et al. 2008). This geometry is also used in multi-azimuth surveys, where the azimuth is the angle between the shot line and the direction to a given receiver on the seafloor. Multi- to full-azimuth acquisition layouts hence ‘illuminate’ the subsurface target from different angles. The subsurface geology, including the geometry of lithological boundaries, is not directly obvious from the record sections of the individual receivers and is only evident after ray-tracing to iteratively account for all travel time arrivals and velocities.
3.2.2 Receiver Types
Conventional refraction surveys use four-component ocean bottom seismometers (4C OBS), combining one vertical and two horizontal geophones that are oriented orthogonal to each other and a pressure sensor (hydrophone) (Fig. 4). In addition to compressional P-waves, four-component receivers also record shear waves (S-waves), which present a significant motivation for recording data on the seabed. Ocean bottom hydrophones (OBH) only carry a pressure sensor. Both receiver types are usually deployed in a free-fall mode from a vessel. They carry a release unit to clear the anchor upon receiving an acoustic release signal. A flotation brings the instrument back up to the surface, where it will be recovered. Where higher precision deployment locations are required, e.g. in areas with dense offshore infrastructure, autonomous ocean bottom nodes (OBN) are deployed and subsequently recovered with the use of remotely operated vehicles (ROV). Ocean bottom cables (OBC) contain numerous four-component sensors and are laid on the seafloor by a cable vessel. Alternatively, an OBC may be permanently deployed or buried in the ocean bottom to monitor temporal changes—a method known as life of field seismic acquisition.

Ocean bottom seismometer (OBS) designed by GEOMAR, Germany. During deployment to the seafloor the entire system rests horizontally on the anchor frame. The instrument is attached to the anchor with a release transponder. Communication with the instrument over ranges of 4–5 nautical miles (~8–9 km) for release and range is possible through a transducer hydrophone. After releasing its anchor weight of approximately 60 kg, the instrument turns 90° into the vertical and ascends to the surface with the floatation on top
3.2.3 Basic Processing Scheme
Standard processing of OBS data includes clock drift correction if differences between the long-term stabilization of the internal clock and the sample frequency clock occur. Additionally, within a given sample period, fewer or more samples than required can be recorded, e.g. 99 samples instead of 100, which needs to be corrected.
Drifting of the OBS in the water column during deployment may cause instrument positions to be mislocated by up to several hundred meters, leading to data asymmetry and incorrect travel time information in the record section. Instrument re-location is carried out using the water wave arrival and exact shot geometry.
Subsequently, a standard signal processing scheme will include a time-gated deconvolution to remove predictable bubble reverberations and obtain a clean signal without disturbing interference of multiple and primary phases. A deconvolution will improve the temporal resolution of the seismic data by compressing the basic seismic wavelet. The recorded wavelet has many components, including the source signature, recording filter, and hydrophone/geophone response. Ideally, the deconvolution should compress the wavelet components to leave only the subsurface reflectivity in the seismic trace. As the amplitude spectra of seismic traces vary with time and offset, the deconvolution must be able to follow these variations and hence is time-gated. In a further step, a time and offset-variant frequency filter accounts for frequency changes caused by signal attenuation. The filter’s passband continuously shifts towards lower frequencies as offset and record time increase.
3.2.4 Forward and Inverse Modeling
Modeling of seismic refraction data includes the identification and picking of the various phases recorded. The data picks then are used as input to forward and inverse modeling approaches. Often, both approaches are used alternately to supplement each other. The idea of forward modeling is to solve the equation of motion for seismic waves. Rays travel through the geological model and the corresponding synthetic travel times are compared with the recorded seismic data. If the fit is within an acceptable level of accuracy, the model is a reasonable representation of the subsurface. If the travel time misfit is too large, the model is altered and new synthetic travel times are computed. This process continues iteratively until the misfit between calculated and real travel times matches the requirements.
In contrast, the inverse approach calculates the velocity-depth model from the acquired travel-time data, based on the linearized relationship between the travel time data and the velocity structure Gm = d, where ‘m’ is the unknown slowness vector (model), ‘d’ is the travel time vector (data) and ‘G’ is a matrix whose rows contain path lengths through each model element (grid) for a given ray path. Commonly the forward model provides the input model to the inversion. The determined model differences between forward and inverted velocity models are updated and refined in the forward model. The updated forward model then provides a new input model to the inverse step. The advantage of this procedure is the full control and stepwise adjustment of the model structures, which are built in the forward model.
4 State of the Art Tools and Methods
4.1 Overview
Seismic methods are continually evolving, often with much of the impetus coming from the oil and gas industry investing in new technologies to find oil and gas. In this section, we give a brief overview of a selection of state of the art tools and techniques that are applicable to submarine geomorphological investigations. What we present is just a selection of many important areas of reflection and refraction seismic methods, which are providing better illumination of challenging targets and allowing more constrained velocity models to be generated from seismic data.
4.2 Parametric Single-Beam Echo-Sounding
Acoustic imaging at the high end of vertical resolution is valuable for understanding fine detail of the most geologically recent processes that have influenced submarine geomorphology. Parametric single-beam echo-sounders are ship-mounted instruments that generate two, slightly different, high frequency signals (e.g. 36–39 kHz and 41–44 kHz, for the Kongsberg TOPAS PS40 system). The interference of these two high frequency signals in the water column results in a lower frequency signal (e.g. 2–8 kHz for the TOPAS PS40 system) with a narrow beam width that produces very high resolution images of the shallow sub-surface (e.g. more than 75 m penetration at a vertical resolution of ~15 cm in ideal cases—Vardy et al. 2012). Modern systems like this can produce very detailed images of sub-surface stratigraphy, structure and fluid flow processes.
4.3 Deep-Towed Seismic Acquisition
Much higher lateral resolution in marine seismic data can be achieved by towing the hydrophones close to the seafloor, rather than just beneath the sea surface (e.g. Breitzke and Bialas 2003; He et al. 2002; Marsset et al. 2014). Recent advancements in the field of deep-towed seismic acquisition have been driven by the development of a seismic source that is capable of operating effectively and consistently at variable water depths—that is, operating independent of hydrostatic pressure. The French marine research institute IFREMER has used such a deep-towed source with a single-channel receiver (Leon et al. 2009) and more recently with a deep-towed multi-channel streamer (Marsset et al. 2014). A major challenge with this technology is obtaining the very accurate positioning of the source and the hydrophones that is required for optimal imaging. Marsset et al. (2014) used a source with a frequency bandwidth of 220–1050 Hz, together with a streamer comprising 52 channels spaced 2 meters apart. In order to be able to accurately predict the shape of the streamer at depth in the water column, each hydrophone was equipped with sensors to monitor changes in pitch, roll and heading during acquisition. Their dataset, acquired in the Western Mediterranean Sea, provided excellent high-resolution imaging of mass transport deposits amid turbidite and hemipelagic sedimentary successions.
4.4 High-Resolution 3D Seismic Imaging
High-resolution 3D images of the sub-seafloor are very powerful for studies of submarine geomorphology because they enable sedimentary and tectonic processes to be unraveled at a high level of detail. Technology that is at the state of the art in this space is the P-Cable seismic system, which was initially developed in Norway in 2001 and patented shortly thereafter (Planke and Berndt 2003). The system is based on multiple (up to 24) relatively short streamers (typically 25–100 m in length) towed close to each other (~10 m apart) behind the vessel. Dense receiver spacing within each of the closely-spaced streamers results in very high spatial resolution. Figure 5 shows an example of P-Cable seismic data from offshore Costa Rica that images paleo-channel systems. The horizontal resolution of these data is ~6 m and the dominant frequency is ~100 Hz. 3D surveying with even higher resolution systems (e.g. a 1.5–13 kHz chirp transducer array; Gutowski et al. 2008) can deliver vertical and spatial resolutions at the decimeter scale.

3D view of high-resolution, depth-migrated P-Cable seismic data from offshore Costa Rica (data processed by Crutchley et al. 2014). Colored horizons are the seafloor and a paleo-channel
4.5 Broadband Imaging
A significant issue inherent in seismic acquisition comes from the free surface ghost—a phenomenon caused by the downward reflection of the upward travelling wavefield at the sea surface due to the fact that both source and receiver are towed beneath the sea surface. The result of the free surface ghost is both constructive and destructive interference of the seismic signal over the natural bandwidth of the source. The nature of the interference depends primarily on the depth of the receivers beneath the sea surface, and can result in major loss of energy at certain (desirable) frequencies. Towing the receiver array (i.e. streamers) at relatively shallow depths will compromise the ability to recover low frequencies, whereas towing at relatively deep depths will compromise high frequencies.
In recent years there has been a strong focus on extending the bandwidth of seismic frequencies recovered during acquisition—i.e. efforts have been made to design methods that reduce the ghost effect described above. One such method is the over-under deghosting method, where streamers are deployed as vertically aligned pairs at two different tow depths (Hill et al. 2006; Sonneland et al. 1986). In this method, the tow depths can be set such that the compromised parts of the frequency spectrum in one streamer are compensated for by the other, and vice versa. Combining the frequency spectra from both streamers in the under-over pair results in a broader frequency bandwidth with, in particular, greater recorded amplitudes at low frequencies. Using deeper tow depths than conventional acquisition also decreases the noise due to wave motion. Such deghosting methods can yield dramatic improvements in seismic imaging. For more information on this topic, the reader is referred to Robertsson et al. (2015) and references therein.
4.6 Mirror Imaging of OBS Data
The wavefield recorded by a seafloor receiver is composed of primary reflections, which travel up from the interface to the seafloor (up-going), as well as receiver ghosts or sea surface multiples. The latter represent an additional reflection off the sea surface, which acts as a ‘mirror’ (Fig. 6). The signal then travels back down from the sea surface to the seafloor (down-going). OBS surveys using only primary signals yield notoriously poor illumination for interfaces beneath the seabed that are shallower than the station interval (Grion et al. 2007). Illumination is improved by mirror imaging, where the multiple signals are also used (e.g. Dash et al. 2009). Depending on the water depth, the shot point grid laterally extends far beyond the receiver grid. Hence the mirror signal yields a much broader subsurface illumination than the primary signal. Mirror imaging consequently provides highly improved coverage and imaging of shallow structural elements. The receiver datum for mirror imaging is shifted to a level twice the water depth to account for the additional ray path of the multiple through the water column. The method is applied for coarsely spaced seafloor receivers and in studies targeting shallow subsurface structure.

The concept of mirror imaging in OBS data acquisition (modifed ater Grion et al. 2007). The sea surface acts as a mirror for primary reflections, which ultimately allows for better imaging of the shallow sub-surface
4.7 Joint Inversion of Refraction and Reflection Data
The incorporation of reflection seismic streamer data in the modeling process is beneficial to coincident refraction studies to include a priori structural information on lithological boundaries. Seismic tomography has proven successful to determine the velocity-depth structure in conjunction with subsurface reflectors and faults (e.g. Korenaga et al. 2000). This approach is based on the simultaneous inversion of refracted and reflected phases with floating reflectors. The method employs a hybrid ray tracing scheme combining the graph method with further refinements utilizing ray bending with the conjugate gradient method (the reader is referred to Korenaga et al. 2000 for a more detailed discussion). Smoothing and damping constraints regularize the iterative inversion. The velocity model is defined as an irregular grid hung from the seafloor reflection. From the coincident MCS seismic data, the well resolved upper (sedimentary) portions may be included as a priori structure into the starting model and fixed during the iterations using spatially variable velocity damping. To make use of secondary arrivals and different reflections, a layer stripping approach is utilized and subsequently the velocity model is built from top to bottom (e.g. Planert et al. 2010). This approach further involves the use of spatially variable velocity damping for the upper layers, e.g., when restricting the picks to the lower layers, and the incorporation of velocity jumps into the input models at primary features such as the basement, plate boundary and the crust mantle boundary (Moho).
4.8 3D Full-Waveform Inversion of Wide-Angle, Multi-azimuth Data
Full waveform inversion (FWI) is a method widely used in the petroleum sector, and for academic research, to produce high-resolution velocity models of the sub-surface. Such velocity models can make it possible to identify lithology types and pore fluid compositions that might otherwise not be discernable from seismic reflection imaging alone. Recent studies have highlighted the strength of FWI to produce detailed P-wave velocity models if surveys are acquired to record wide-angle, multi-azimuth refractions (Morgan et al. 2013). By testing recoverable resolutions for synthetic seismic data, Morgan et al. (2013) discuss how such surveys, with an array of ocean bottom receivers, can resolve deep structures in the crust better than any other geophysical technique. Future developments in this area could significantly improve our ability to investigate deep-seated geological processes like arc volcanism, for example, that have distinct submarine geomorphological manifestations.
5 Strengths and Weaknesses
The clear strength of seismic methods in submarine geomorphology is the ability to illuminate the sub-surface over large areas, either by acquiring a number of 2D seismic profiles or by acquiring 3D datasets. Other geophysical tools like multibeam echo-sounders and sidescan sonar systems (Chapters “Sidescan Sonar” and “Multibeam Echosounders”, respectively) efficiently deliver remarkably high-resolution images of the seafloor, but do not image sub-seafloor geology. Thus, seismic reflection and refraction methods are routinely used to investigate the deeper processes that shape the seafloor.
In comparing reflection and refraction methods, it is clear that the seismic reflection method is the tool of choice for producing high-resolution images of buried strata and structures. 3D seismic reflection methods, in particular, can deliver imagery that allows us to examine past geomorphological expressions, such as meandering channel systems and mass transport deposits (e.g. Kolla et al. 2007). On the other hand, seismic refraction experiments have their strength in developing large-scale velocity models that are consistently used to explore deep, crustal processes, like subduction, seafloor spreading, and arc volcanism (e.g. Kopp et al. 2011). In terms of low-cost academic surveys, high-resolution 2D seismic reflection profiles are generally simpler to acquire, process and interpret than crustal-scale 2D seismic refraction profiles. The latter require greater source volumes, longer source-receiver offsets, as well as the deployment and recovery of instruments on the seafloor.
When compared to other data acquisition methods used in submarine geomorphology, seismic methods are probably best considered as a tool that provides the ‘bigger picture’ context for a given geomorphological investigation. In this sense, they are similar to electric and electromagnetic methods that are also used to remotely sense the sub-surface. The strength of seismic methods is not in delivering detailed seafloor characteristics; that is best investigated with higher-resolution side-scan sonar imaging (Chapter “Sidescan Sonar”) and targeted seabed sampling (Chapter “Seafloor Sediment and Rock Sampling”). Indeed, direct sampling methods are the only way to confirm lithological interpretations that are made from remotely-sensed data. Seismic methods are most powerful when combined with other geo-scientific methods. For example, the integration of high-resolution seismic data and shallow sediment samples often vastly improves the understanding of submarine slope failure processes that dramatically change seafloor morphology (e.g. Vardy et al. 2012). In another example, the combination of controlled-source electromagnetic data with seismic data can help to identify and characterize sub-seafloor fluid flow processes that also often manifest themselves at the seafloor (Goswami et al. 2015).
Notes
- 1.
It should be noted that seismic reflections can also be imaged above (i.e. before) the seafloor: Seismic oceanography is a relatively modern discipline that involves imaging stratification within the ocean (Holbrook et al. 2003).
- 2.
In 2013, the geoscience company CGG released a press statement claiming the largest man-made moving object on Earth—a 3D receiver array with an acquisition footprint of 13.44 km2. This was achieved by towing eight 12 km-long streamers in parallel, with 160 m spacing between the streamers.
References
Banerjee B, Gupta SK (1975) Hidden layer problem in seismic refraction work. Geophys Pros 23:642–652
Breitzke M, Bialas J (2003) A deep-towed multichannel seismic streamer for very high-resolution surveys in full ocean depth. First Break 21:59–65
Chadwick RA, Noy D, Arts R, Eiken O (2009) Latest time-lapse seismic data from Sleipner yield new insights into CO2 plume development. Energy Procedia 1:2103–2110
Crutchley GJ, Klaeschen D, Planert L, Bialas J, Berndt C, Papenberg C, Hensen C, Hornbach M, Krastel S, Brueckmann W (2014) The impact of fluid advection on gas hydrate stability: Investigations at sites of methane seepage offshore Costa Rica. Earth Planet Sci Lett 401:95–109
Dash R, Spence G, Hyndman R, Grion S, Wang Y, Ronen S (2009) Wide-area imaging from OBS multiples. Geophysics 74:Q41–Q47
Fayemendy C, Espedal PI, Andersen L, Lygren M (2012) Time-lapse seismic surveying: a multi-disciplinary tool for reservoir management on Snorre. First Break 30:49–55
Geotrace (2010) Pegasus, bounty trough, great South Basin and Shake processing report. Ministry of Economic Development New Zealand, Unpublished petroleum report PR4279
Goswami BK, Weitemeyer KA, Minshull TA, Sinha MC, Westbrook GK, Chabert A, Henstock TJ, Ker S (2015) A joint electromagnetic and seismic study of an active pockmark within the hydrate stability field at the Vestnesa Ridge, West Svalbard margin. J Geophys Res 120:6797–6822
Grion S, Exley R, Manin M, Miao X-G, Pica A, Wang Y, Granger P-Y, Ronen S (2007) Mirror imaging of OBS data. First Break 25:37–42
Gutowski M, Bull JM, Dix JK, Henstock TJ, Hogarth P, Hiller T, Leighton TG, White PR (2008) 3D high-resolution acoustic imaging of the sub-seabed. Appl Acoust 69:262–271
He T, Spence G, Wood W, Riedel M, Hyndman R (2002) Imaging a hydrate-related cold vent offshore Vancouver Island from deep-towed multichannel seismic data. Geophysics 74:B23–B26
Hill D, Combee L, Bacon J (2006) Over/under acquisition and data processing: the next quantum leap in seismic technology? First Break 24:81–96
Holbrook WS, Páramo P, Pearse S, Schmitt RW (2003) Thermohaline fine structure in an oceanographic front from seismic reflection profiling. Science 301:821–824
Kolla V, Posamentier HW, Wood LJ (2007) Deep-water and fluvial sinuous channels—Characteristics, similarities and dissimilarities, and modes of formation. Mar Petrol Geol 24:388–405
Kopp H, Klaeschen D, Flueh ER, Bialas J, Reichert C (2002) Crustal structure of the Java margin from seismic wide-angle and multichannel reflection data. J Geophys Res 107:ETG 1-1–ETG 1-24
Kopp H, Weinzierl W, Becel A, Charvis P, Evain M, Flueh ER, Gailler A, Galve A, Hirn A, Kandilarov A, Klaeschen D, Laigle M, Papenberg C, Planert L, Roux E (2011) Deep structure of the central Lesser Antilles Island Arc: relevance for the formation of continental crust. Earth Planet Sci Lett 304:121–134
Korenaga J, Holbrook WS, Kent GM, Kelemen PB, Detrick RS, Larsen H-C, Hopper JR, Dahl-Jensen T (2000) Crustal structure of the Southeast Greenland margin from joint refraction and reflection seismic tomography. J Geophys Res 105:21591–21614
Leon P, Ker S, Marsset B, LeGall Y, Voisset M (2009) SYSIF a new seismic tool for near bottom very high resolution profiling in deep water. In: Proceedings of the OCEANS 2009 Europe Conference, v. Bremen, 11–14 May
Marsset B, Menut E, Ker S, Thomas Y, Regnault J-P, Leon P, Martinossi H, Artzner L, Chenot, Dentrecolas S, Spychalski B, Mellier G, Sultan N (2014) Deep-towed high resolution multichannel seismic imaging. Deep Sea Res I 93:83–90
Michell S, Shoshitaishvili E, Chergotis D, Sharp J, Etgen J (2006) Wide azimuth streamer imaging of Mad Dog; Have we solved the subsalt imaging problem? In: Proceedings 2006 SEG annual meeting 2006, Society of Exploration Geophysicists
Morgan J, Warner M, Bell R, Ashley J, Barnes D, Little R, Roele K, Jones C (2013) Next-generation seismic experiments: wide-angle, multi-azimuth, three-dimensional, full-waveform inversion. Geophys J Int 195:1657–1678
Müller C, Milkereit B, Bohlen T, Theilen F (2002) Towards high-resolution 3D marine seismic surveying using Boomer sources. Geophys Prosp 50:517–526
Parkes G, Hatton L (1986) The marine seismic source. Springer Science & Business Media, Dordrecht 114 pp
Petersen CJ, Bünz S, Hustoft S, Mienert J, Klaeschen D (2010) High-resolution P-Cable 3D seismic imaging of gas chimney structures in gas hydrated sediments of an Arctic sediment drift. Mar Petrol Geol 27:1981–1994
Planert L, Kopp H, Lueschen E, Mueller C, Flueh ER, Shulgin A, Djajadihardja Y, Krabbenhoeft A (2010) Lower plate structure and upper plate deformational segmentation at the Sunda-Banda arc transition. Indonesia J Geophys Res 115:B08107. doi:10.1029/2009JB006713
Planke S, Berndt C (2003) Anordning for seismikkmåling. Norwegian Patent no. 317652 (UK Pat. No. GB 2401684; US Pat No. US7,221,620 B2)
Pramik B (2013) Marine vibroseis: shaking up the industry. First Break 31:67–72
Robertsson JOA, Laws RM, Kragh JE (2015) Tools and techniques: marine seismic methods. In: Schubert G, Slater L, and Bercovici D (eds) Treatise on geophysics. resources in near-surface earth, vol 11. Elsevier, Amsterdam
Sheriff RE, Geldart LP (1995) Exploration seismology. Cambridge University Press, Cambridge, 592 pp
Sonneland L, Berg L, Eidsvig P, Haugen A, Fotland B, Vestby I (1986) 2D deghosting using vertical receiver arrays. 56th Annual International Meeting, SEG, Expanded Abstracts, pp 516-519
Vardy ME, L’Heureux J-S, Vanneste M, Longva O, Steiner A, Forsberg CF, Haflidason H, Brendryen J (2012) Multidisciplinary investigation of a shallow near-shore landslide, Finneidfjord, Norway. Near Surf Geophys pp 267–277
Westbrook GK, Chand S, Rossi G, Long C, Bünz S, Camerlenghi A, Carcione JM, Dean S, Foucher J-P, Flueh E, Gei D, Haacke RR, Madrussani G, Mienert J, Minshull TA, Nouzé H, Peacock S, Reston TJ, Vanneste M, Zillmer M (2008) Estimation of gas hydrate concentration from multi-component seismic data at sites on the continental margins of NW Svalbard and the Storegga region of Norway. Mar Petrol Geol 25(8):744–758. ISSN: 0264-8172. https://doi.org/10.1016/j.marpetgeo.2008.02.003
Yilmaz O (2001) Seismic data analysis: processing, inversion, and interpretation of seismic data, Society of Exploration Geophysicists, Tulsa
Acknowledgements
We are grateful to the editors of this book for their invitation to write this chapter, and to Sebastian Krastel in particular for his review of the text. We also thank Joerg Bialas and Sebastian Krastel for their permission to present the seismic data shown in Fig. 5.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer International Publishing AG
About this chapter
Cite this chapter
Crutchley, G.J., Kopp, H. (2018). Reflection and Refraction Seismic Methods. In: Micallef, A., Krastel, S., Savini, A. (eds) Submarine Geomorphology. Springer Geology. Springer, Cham. https://doi.org/10.1007/978-3-319-57852-1_4
Download citation
DOI: https://doi.org/10.1007/978-3-319-57852-1_4
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-57851-4
Online ISBN: 978-3-319-57852-1
eBook Packages: Earth and Environmental ScienceEarth and Environmental Science (R0)