
Abstract
It is presented a 3D Virtual system with a haptic device that allows the interaction between a user and a virtual environment developed in Unity3D. This System was designed for rehabilitation of paretic hands in adult people with Stroke; the virtual environment was developed considering a daily life’s activity (watering plants in pots). The system was used by five people with mild and moderate Stroke according to ASWRTH 1+ scale, which completed the exercise showed in the virtual application. Patients performed a usability test SUS with outcomes (79, 5 ± 3, 67) this allows to define that the system has a good acceptance for rehabilitation.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Stroke is considered as the main cause of death in the world [1] one in four people who suffers Stroke dies for this cause [2]; survivors show a neurological deficit that affects one or more cerebral function according to the region of the brain where the accident occurred; main consequences after a Stroke are speech and language alterations, impaired vision, instability, and the most common are motor disorders [3]; A recent study shows that 80% of all patients with Stroke present impaired motor function in upper limbs and 30% to 40% achieve to recover motor function after six months of therapy [4]. Rehabilitation after Stroke is important because it can get the brain to learn new ways for working [6]; factors such as repetition, motor learning, feedback [5,6,7,8,9] and tasks focused on activities of daily life have been shown to be fundamental in recovery after Stroke [10]. Recent technological advances have allowed that the treatments are adapted to virtual applications that help patients to have a better recovery.
Virtual reality (VR) has been gaining a wide field in the motor rehabilitation process by offering personalized experiences that involve different sensory channels, such as sight, hearing and sometimes touching [11]. The VR with external devices such as Wii (Nintendo) [12], Kinect sensor (Microsoft) [13], haptic devices [14], and others allow the patient to work with a targeting system thus has an extra motivation to accomplish all the objectives. Nowadays, the number of studies based on virtual reality has been increased having good results in motor rehabilitation in upper limbs [15,16,17,18]. The interaction of haptic devices with virtual environments with tactile feedback allows more patient immersion in the performed task [19,20,21].
The purpose of the application is to implement a 3D virtual system that will be used in rehabilitation of paretic hands in people with Stroke; the creation of the virtual game is focused in fine motor exercises for rehabilitation mainly in “scissors” exercises. The application integrates the Geomagic Touch (haptic device), the software Unity3D and a laptop which includes a video card. In the design of the 3D virtual environment is considered an activity of daily life like watering the plants in a garden. In Fig. 1 a diagram of the system is presented.

Virtual 3D system using haptic device.
2 Technologies Used
2.1 Geomagic Touch Haptic Device
The device provides an authentic three-dimensional navigation and force feedback and integrates the sense of touch into commercial and research applications [22]. The device can accurately measure the 3D spatial position (along the X, Y and Z axes) and the orientation (rotation and direction) of the hand pen. Geomagic Touch is a motorized device that applies force feedback on the user’s hand, allowing them to feel virtual objects and producing true-to-life touch sensations as user manipulates on-screen 3D objects. Leading companies integrate the Geomagic Touch and haptics into their work to achieve compelling solutions using the realistic sense of touch.
2.2 Software Unity3D
Unity3D is a complete platform to develop videogames in existence, it allows the creation of games for multiple platforms from a single development, including the development of games for console (PlayStation, Xbox and Wii), desktop (Linux, PC and Mac), browser, mobile and tablets (iOS, Android, Windows Phone and BlackBerry). The Unity 3D editor is one of the simplest and most powerful in the market, divided into 5 main views: explorer, inspector, hierarchy, scene and game.
2.3 Portable Computer
The computer used for the creation and generation of Virtual Reality environments has the features presented in Table 1.
3 Methodology
Development of the 3D virtual system was considered stages in Fig. 2.

Block diagram of the stages in virtual 3D system.
3.1 Description of the Stages in the 3D Virtual System
3.1.1 Movements Acquisition
The Geomagic Touch Haptic device picks up the movements in the real space on the X, Y and Z axes; this is done through digital encoders inside the device. The kinematics model of the device position is given by equation [23]:
Where x ∈ R3×1 denote the operational coordinates vector and q ∈ R3×1 is the vector of joint coordinates.
3.1.2 Data Interpretation
The computer receives position information with Ethernet communication; this data will be interpreted later through the special Unity 3D libraries programmed in C# designed for the communication between the virtual environment and the Geomagic Touch.
3.1.3 Movement in the Environment
We implemented a virtual garden developed in Unity 3D, where a virtual sprinkler acquires the movements in the virtual axes X, Y and Z, that are performed in the real axes X, Y and Z by the haptic device.
3.1.4 Collisions Simulation
When a collision occurs between the mobile virtual object (sprinkler) and a static virtual object (flower pot) Geomagic Touch will give a force feedback, this class of events occurs through special libraries programmed in C# for communication between Unity3D and the Geomagic Touch device.
3.1.5 Feedback Forces
When a collision occurs between objects in the virtual environment, an output data packet is generated towards the haptic device, which through the motors inside will give a feedback force to the user. The torque generated by the haptic device is defined by the following equation:
Where τ ∈ R3×1 defines the torques vector, JT is the transpose of the Jacobian matrix and F ∈ R3×1 is the forces vector defined by the interaction in the virtual environment.
4 Description of Operation to Use the 3D System
Using this 3D virtual system in fine motor virtual rehabilitation the following procedure is performed:
-
1.
Patient should be placed in a seated position so the exercises to be performed are not tiring, then the patient must take the manipulator of the Geomagic Touch as a clamp (like if the patient takes a pen).
-
2.
When the patient is positioned in the virtual environment, a sprinkler appears in the screen which carries water to grow garden’s plants as shown in Fig. 3. This virtual sprinkler takes the movements that the patient performs with the pen in real space.
Fig. 3. 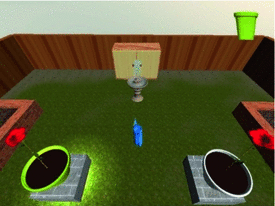
First position in the virtual environment
-
3.
Sprinkler should be placed on top of each pot and the water should be dropped on them for a period determined by the user to grow the plant. In case the sprinkler is in wrong position or if it collides with the pot, a force feedback occurs, giving the patient the sensation of presence of the virtual object (Fig. 4).
Fig. 4. 
Virtual environment in operation.
-
4.
When the first target is completed appears in the top right of screen the color of the next target to be watered as illustrated in Fig. 5, the movement between targets is determined by a targeting system that indicates the next movement of the patient. In total, the virtual environment has four targets that must be completed.
Fig. 5. 
Virtual environment in operation and presentation of the new target to be completed



5 Tests and Results
In order to determine usability of the implemented system, the system was tested by five people aged 50–85 years (4 men and 1 woman), who had suffered Stroke for one year or more, the patients had mild or moderate spasticity according to the ASWRTH 1+ scale [24]. Patients receive the information about the functionality of the system through a rehabilitator, then they use the 3D system according to the procedure described previously, complete the developed stage in the virtual environment and then fill the SUS questionary. In Fig. 6 the users of the Virtual 3D system are presented.

3D virtual system used by patients with Stroke
The questions asked to users about 3D virtual system and the results of the usability test are presented in Table 2.
The result of SUS questionnaire made by five patients after complete the 3D virtual system is: (79.5 ± 3.67).
6 Conclusions and Future Work
The 3D virtual system was used by 5 patients with Stroke who have mild or moderate spasticity according to the ASWRTH 1+ scale, the results of SUS are (79.5 ± 3.67), in [25], Bangor et al. determined that a result in an interval ranging from 70 to 85 in the SUS questionnaire is a good result, so this 3D virtual system has acceptance to be used in rehabilitation.
The 3D virtual system was developed based on one of the activities of daily life (watering plants in a garden), considering that it will be used by adults who have a great affinity with daily tasks they have performed. As well as the system provides feedback by detection of obstacles, this feedback provides an immersion when developing rehabilitation.
As future work the implemented system will be used in rehabilitation therapies of patients with Stroke; the patients who interacted the system are very interested in using it as an alternative to fine motor rehabilitation.
References
Shiroma, E.J., Ferguson, P.L., Pickelsimer, E.E.: Prevalence of traumatic brain injury in an offender population: a meta-analysis. J. Correctional Health Care 16(2), 147–159 (2010)
Progress in improving stroke care: Department. http://www.nao.org.uk/report/department-of-healthprogress-in-improving-stroke-care/
Fregni, F., Pascual-Leone, A.: Hand motor recovery after stroke: tuning the orchestra to improve hand motor function. Cogn. Behav. 19, 21–33 (2006)
Prabhakaran, S., Zarahn, E., Riley, C., Speizer, A., Chong, J.Y., Lazar, R.M., Marshall, R.S., Krakauer, J.W.: Inter-individual variability in the capacity for motor recovery after ischemic stroke. Neurorehabil. Neural Repair 22, 64–71 (2008)
Kwakkel, G., Kollen, B., Lindeman, E.: Understanding the pattern of functional recovery after stroke: facts and theories. Restor. Neurol. Neurosci. 22, 81–99 (2004)
Nielsen, J.B., Willerslev-Olsen, M., Christiansen, L., Lundbye-Jensen, J., Lorentzen, J.: Science-based neurorehabilitation: recommendations for neurorehabilitation from basic science. J. Mot. Behav. 47(1), 7–17 (2015)
Shaughnessy, M., Resnick, B.M.: Using theory to develop an exercise intervention for patients post stroke. Top. Stroke Rehabil. 16(2), 140–146 (2009)
Subramanian, S.K., Massie, C.L., Malcolm, M.P., Levin, M.F.: Does provision of extrinsic feedback result in improved motor learning in the upper limb post stroke? A systematic review of the evidence. Neurorehabil. Neural Repair 24(2), 113–124 (2010)
Arya, K.N., Verma, R., Garg, R.K., Sharma, V.P., Agarwal, M., Aggarwal, G.G.: Meaningful task-specific training (MTST) for stroke rehabilitation: a randomized controlled trial. Top. Stroke Rehabil. 19(3), 193–211 (2012)
Ohtake, P.J.: Physical therapy-key component of the rehabilitation team. International Encyclopedia of Rehabilitation (2010)
Levin, M.F., Weiss, P.L., Keshner, E.A.: Emergence of virtual reality as a tool for upper limb rehabilitation: incorporation of motor control and motor learning principles. Phys. Ther. 95(3), 415–425 (2015)
Kumar, D., et al.: Engagement-sensitive interactive neuromuscular electrical therapy system for post-stroke balance rehabilitation-a concept study. In: Neural Engineering (2015)
Kumar, D., Das, A., Lahiri, U., Dutta, A.: A human-machine interface integrating low-cost sensors with a neuromuscular electrical stimulation system for post-stroke balance rehabilitation (2016)
Sucar, L.E., et al.: Gesture therapy: an upper limb virtual reality-based motor rehabilitation platform. Trans. Neural Syst. Rehabil. 22, 634–643 (2014)
Laver, K.E., George, S., Thomas, S., Deutsch, J.E., Crotty, M.: Virtual reality for stroke rehabilitation. Cochrane Database Syst. Rev. (2015)
Tatla, S.K., Shirzad, N., Lohse, K.R., Virji-Babul, N., Hoens, A.M., Holsti, L., et al.: Therapists’ perceptions of social media and video game technologies in upper limb rehabilitation. JMIR Serious Games 3, e2 (2015)
Colomer, C., Llorens, R., Noé, E., Alcañiz, M.: Effect of a mixed reality-based intervention on arm, hand, and finger function on chronic stroke. J. NeuroEng. Rehabil. 13, 45 (2016)
Albiol-Pérez, S., et al.: Acceptance and suitability of a novel virtual system in chronic acquired brain injury patients. In: Rocha, Á., Correia, A., Adeli, H., Reis, L., Mendonça, T.M. (eds.) New Advances in Information Systems and Technologies. AISC, vol. 444, pp. 1065–1071. Springer, Cham (2016)
Dhiman, A., Solanki, D., Bhasin, A., Bhise, A., Das, A., Lahiri, U.: Design of adaptive haptic-enabled virtual reality based system for upper limb movement disorders: a usability study. In: 6th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob 2016), Singapore, pp. 1254–1259 (2016)
Li, S., Zhang, X.: Eye-movement-based objective real-time quantification of patient’s mental engagement in rehabilitation: a preliminary study. In: 2014 IEEE International Conference on Mechatronics and Automation, Tianjin, pp. 180–185 (2014)
Shah, N., Basteris, A., Amirabdollahian, F.: Design parameters in multimodal games for rehabilitation. Games Health Res. Dev. Clin. Appl. 3(1), 13–20 (2014)
Geomagic Touch. http://www.geomagic.com/en/products/phantom-omni/overview
Jarillo-Silva, A., Domínguez-Ramírez, O., Parra-Vega, V., Ordaz-Oliver, J.: Phantom omni haptic device: kinematic and manipulability. In: 2009 Electronics, Robotics and Automotive Mechanics Conference, pp. 193–198 (2009)
Mutlu, A., Livanelioglu, A., Gunel, M.K.: Reliability of Ashworth and modified Ashworth scales in children with spastic cerebral palsy. BMC Musculoskelet. Disord. 9, 44 (2008)
Bangor, A., Kortum, P., Miller, J.: Determining what individual SUS scores mean: adding an adjective rating scale. J. Usability Stud. 4(3), 114–123 (2009)
Acknowledgment
Acknowledgments to Universidad de las Fuerzas Armadas ESPE by the financing of research project number 2015-PIC-006; To Jefatura de Investigación, Innovación y transferencia de tecnología from extention Latacunga and the Electrical and Electronics Department for all the support provided in the development of this work.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing AG
About this paper
Cite this paper
Pruna, E. et al. (2017). 3D Virtual System Using a Haptic Device for Fine Motor Rehabilitation. In: Rocha, Á., Correia, A., Adeli, H., Reis, L., Costanzo, S. (eds) Recent Advances in Information Systems and Technologies. WorldCIST 2017. Advances in Intelligent Systems and Computing, vol 570. Springer, Cham. https://doi.org/10.1007/978-3-319-56538-5_66
Download citation
DOI: https://doi.org/10.1007/978-3-319-56538-5_66
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-56537-8
Online ISBN: 978-3-319-56538-5
eBook Packages: EngineeringEngineering (R0)