
Abstract
The multi-channel MAC protocols provide not only reliable transmission of safety application but also the maximal throughput for non-safety application in Vehicle Ad Hoc Networks (VANETs). One such scheme is to employ both TDMA and CSMA schemes in the Control CHannel (CCH). A vehicle will send safety message without collision on the TDMA-based period during its reserved time slot and utilize the SCH resources on the CSMA-based period for the non-safety message. In this paper, we propose a modification of a dedicated multi-channel MAC protocol(DMMAC) protocol (called EMMAC protocol). The EMMAC protocol can reduce the transmission overhead when node density is high and outperform the DMMAC protocol in terms of packet delivery ratio.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction and Related Works
Vehicular Ad Hoc Network (VANET) is known as the network among moving vehicles and an important part of the Intelligent Transportation System (ITS). VANET consists of a set of vehicles equipped with a radio interface, called On-Board Unit (OBU) and RoadSide Units (RSUs) distributed along the road, to connect to the Internet. Based on RSUs and OBUs, VANETs consist of two main communication types: Vehicle-to-Vehicle (V2V) and Vehicle-to-RSU (V2R). The Medium Access Control (MAC) protocols are proposed to provide efficient and reliable medium access but is difficult to design because of fast topology change, high node mobility and different Quality of Service (QoS) requirements. In addition, MAC protocols aim to increase a variety of safety applications and non-safety applications, and provide comfort to drivers and passengers. Safety applications are the most important message [1]. They have the very strict delay demand and high priority. Non-safety applications are more throughput-sensitive than delay-sensitive.
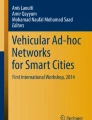
In year 1999, the Federal Communication Commission (FCC) of the U.S approved 75 MHz bandwidth at 5.850–5.925 GHz frequency band for ITS wireless communications. It is divided into seven channels, as shown in Fig. 1. One of the seven channels is assigned the Control Channel (CCH), i.e. CH 178, which can only provide safety relevant applications and system control and management with high priority. Service Channels (SCHs) use other six channels, mainly supporting the non-safety relevant applications.

Frequency channel layout of a 5.9 GHz WAVE system.
The IEEE 1609.4 standard draft [2] is considered to be a default multichannel MAC standard for VANETs, which defines a multichannel wireless radio operation mode, including the interleaving operation of the CCH and SCH, priority access parameters, and other characteristic of MAC and Physical Layer Protocols (PHYs). In IEEE 1609.4, nodes broadcast safety messages or negotiate the SCHs during the Control Channel Interval (CCHI). In the Service Channel Interval (SCHI), nodes switch to the negotiated SCHs for their non-safety messages transmissions. This scheme has a high contention during the CCHI and the SCHI resources cannot be utilized during this interval.
A Vehicular MESH network (VMESH) MAC protocol [3] applied a distributed beaconing scheme and a reservation-based channel access to improve the channel utilization of SCHs. In VMESH protocol, CCHI is divided into two periods: Beacon Period (BP) and Safety Period (SP). Each node chooses a unique beacon slot in the BP to broadcast its packet including local information, its one-hop neighbor map and SCHs information. The VMESH protocol outperforms current Wireless Access in Vehicular Environment (WAVE) MAC schemes in terms of system throughput. However, CCH has low channel utilization.
A Variable CCH Interval (VCI) multi-channel MAC scheme [4] is proposed to improve the saturation throughput and the reliable transmission for the safety message. CCHI is also divided into two intervals: safety interval and Wave Service Announcement (WSA) interval. The safety interval can adjust according to the network condition. Nevertheless, SCH resources are wasted during the CCHI in the VCI.
Based on TDMA and CSMA schemes, a Dedicated Multi-channel MAC (DMMAC) [5] is proposed to provide collision-free and delay-bounded transmissions for safety messages. CCHI is divided into two periods according to its schemes: Adaptive Broadcast Frame (ABF - based on TDMA scheme) and Contention-based Reservation period (CRP-based on CSMA scheme). Each node must to reserve its time slot in TDMA-based period for collision-free delivery of the safety message or control message.
One of the well-known problems of Time Division Multiple Access-based (TDMA-based) MAC protocols, such as (DMMAC) [5] is transmission overhead when node density is high. To solve transmission overhead problem, we propose the modified announcement packet to reduce payload size of packet transmitted in the TDMA-based period, called EMMAC protocol. Based on our proposal, each node can transmit concurrently without collision, and then the packet delivery ratio will be improved.
The rest of this paper is organized as follows: Sect. 2 gives the system model. Operation of EMMAC protocol is presented in Sect. 3. Section 4 analyzes the performance and simulation results of the EMMAC protocol. Section 5 concludes this research and suggests some future works.

Channel access process of EMMAC protocol.
2 System Model
The VANET under consideration is similar to WAVE MAC protocol and DMMAC protocol: the channel access time is divided into each sync interval as shown in Fig. 2. A sync interval consists of a CCH interval (CCHI) and an SCH interval (SCHI) of the same length. CCHI is used by combining two schemes: TDMA and CSMA schemes. TDMA-based period (TP) is used to broadcast its information including local information, one-hop neighbor map and high priority safe application. Contention period (CSMA-based period (CP)) is used for each node to negotiate to use SCH for exchanging non-safety application. A pair source-destination nodes use Wave Service Announcement (WSA)/ACKnowledgment (ACK)/RESponsibility (RES) to handshaking. SCHI also is divided into equal-duration slot. This channel coordination scheme is depicted in Fig. 2.
In EMMAC protocol, the TP is divided into 2 frames: Reserved Nodes Frame (RNF) and Vitural Slot Frame (VSF). According to [6], the length of TP (TPL) can adjust in every CCHI based on the network topology of its neighborhood, given as \(TPL = RNF + VSF\).
3 EMMAC Protocol
In this protocol, we assume that all nodes are time-synchronized using the Global Positioning System (GPS). Each node must acquire one time slot on the TP in the CCHI. Once a node acquires successfully a time slot, it keeps accessing the same time slot in all next sync interval without collision. During a time slot, each node has to broadcast packet to confirm it’s exist in the network. Each packet transmitted on the TP consists of seven fields: a short identifier (ID), reserved time slot, length of time slot, IDs of one-hop neighbors (IDONH), one-hop neighbor information map (OHNM), two-hop neighbors information map (THNM) and high priority safe applications as shown in Fig. 3. In the one-hop and two-hop information map, bit 1 is represented to BUSY and bit 0 means FREE. Note that the length of one-hop information map equals to the length of two-hop information map. Because the EMMAC protocol uses bits map represented to allocated time slots of one-hop and two-hop neighbor information, the transmission overhead is smaller than DMMAC protocol as shown in Table 1.

Frame information transmitted in each time slot.
Each node will broadcast a packet during its time slot even if the node has no data to include in the high priority safe application. Based on one-hop neighbor information map, a new node can choose available time slot to acquire in next sync interval. If there is no available time slot on the RNF, a new node can access to virtual slots (VSF).

Accessing time slots on the TP.
3.1 Accessing Time Slots on the TP
According to [6], a new node can acquire a time slot on the TP. In this protocol is divided into 2 cases: accessing time slots with available time slot(s) on the RNF, and accessing time slots without an available time slot on the RNF. When a new node, node x, enters the network, x has to listen one sync interval to receive all packets transmitted in its transmission range. Node x can collect one-hop neighbor information and an available time slot to access in the next sync interval. If there is an available time slot on the RNF, node x will choose this time slot to access in the next sync interval. Otherwise, node x will choose one time slot on the VSF to access and the length of RNF will be increased after node x acquires successfully a time slot. All cases are shown in Fig. 4.
3.2 Dynamic TDMA-Based Period Length
The information in OHNM is used to decide which time slots new nodes can access on the TP. If the length of OHNM of neighbors is different, the length of OHNM of a new node is given as \(OHNM_i=max{OHNM_j}\) where i is a new node and \(\forall j \in IDOH{N_i}\), \(IDOH{N_i}\) is the number of the \(i^{th}\) IDOHN. When a node i receives all packet transmitted by its one-hop neighbor, the length of THNM of node i is computed as \(THNM_i=max{THNM_j}\) \(\forall j \in IDOH{N_i}\). Note that the length of OHNM must be equal to the length of THNM.
In the information of node 1, as shown in Table 2, node 1 has one-hop neighbors set: nodes 2 and 3. After node 1 receive all packets transmitted on the TP, node 1 has full information, such as \(TPL_1 = 6\), \(OHNM_1 = 111000\), and \(THNM_1=111110\).
Rule 1: For source node a and destination node b, if nodes a and b have the same THNM, they can transmit a packet according to CSMA scheme after TPL time slots.
Now example in Fig. 5, nodes 3–6 have same \(THNM = 1110 \). Node 3 can transmit packet to node 4 after 4 time slots on the TP. Because nodes 3, 4 and 6 are not one-hop neighbor of each other, node 6 can transmit a packet to node 5 without collision which is generated by node 3. In this case, the parallel transmission can be happened and hence, the throughput of WSA packet is increased.

Accessing time slots on the SCH.
4 Performance Evaluation
In this section, the performance of the EMMAC protocol in our developed event-driven simulation tool of MATLAB is evaluated and compared to that of DMMAC protocol [5]. The parameters for simulation environment are listed in Table 3. In this simulation, slot duration is 1 ms and contention window for the WSA message transmission (\(W_s\)) is set to 16.
Now we compare the performance of DMMAC protocol and our proposed EMMAC in terms of the packet delivery ratio (PDR) of the safety message. The safety packet arrival rate (\(\lambda _s\)) is set to 25 pkts/s. For DMMAC and EMMAC protocols, PDRs versus variable number of nodes (Fig. 6) and contention window of safety message (Fig. 7) are shown. When the number of nodes is small, the collision on the CP is also small. Hence, PDR in DMMAC and EMMAC protocols has approximately the same value as shown in Fig. 6. However, if the number of nodes increases, the collision on the CP also increases. PDRs in the EMMAC and DMMAC protocols allows nodes to transmit parallelly, and hence PDR in EMMAC protocol outperforms PDR in DMMAC protocol.

Packet delivery ratio versus variable number of nodes.

Packet delivery ratio versus variable contention window.
The contention window affects to the collision on the CP. If the CW is small, the collision is big because many nodes will take the same CW to attempt to broadcast safety message on the CP. In Fig. 7, when the CW is small, the EMMAC protocol outperforms the DMMAC protocol in terms of PDR. IF the CM increases, PDR in DMMAC and EMMAC protocols have approximately the same value.
5 Conclusion
This paper presented a modification of a dedicated multi-channel MAC protocol, called EMMAC protocol. We used bit map represented to allocated time slots of one-hop and two-hop neighbors. EMMAC protocol can reduce the transmission overhead when node density is high. Simulation results show that the EMMAC protocol allows node to transmit parallels. Moreover, the EMMAC protocol outperforms the DMMAC protocol in terms of packet delivery ratio of safety message. In the future, our protocol is extended to be adaptive in more realistic scenarios, such as mobility, channel and traffic model.
References
Xu, Q., Mak, T., Ko, J., Sengupta, R.: Vehicle-to-vehicle safety messaging in DSRC. In: Proceedings of the 1st ACM International Workshop on Vehicular Ad Hoc Networks, pp. 19–28. ACM (2004)
IEEE Standard for Wireless Access in Vehicular Environments (WAVE) Multi-channel Operation, September 2010
Zang, Y., Stibor, L., Walke, B., Reumerman, H.-J., Barroso, A.: Towards broadband vehicular ad-hoc networks - the vehicular mesh network (VMESH) MAC protocol. In: Wireless Communications and Networking Conference, WCNC 2007, pp. 417–422. IEEE, March 2007
Wang, Q., Leng, S., Fu, H., Zhang, Y.: An IEEE 802.11p-based multichannel MAC scheme with channel coordination for vehicular ad hoc networks. IEEE Trans. Intell. Transp. Syst. 13(2), 449–458 (2012)
Lu, N., Ji, Y., Liu, F., Wang, X.: A dedicated multi-channel MAC protocol design for VANET with adaptive broadcasting. In: Wireless Communications and Networking Conference (WCNC), pp. 1–6. IEEE (2010)
Nguyen, V., Oo, T.Z., Chuan, P., Hong, C.S.: An efficient time slot acquisition on the hybrid TDMA/CSMA multichannel MAC in vanets. IEEE Commun. Lett. 20(5), 970–973 (2016)
Acknowledgments
This work was supported by Institute for Information & communications Technology Promotion (IITP) grant funded by the Korea government (MSIP)(B0190-16-2017) Resilient/Fault-Tolerant Autonomic Networking Based on Physicality, Relationship and Service Semantic of IoT Devices). Dr. CS Hong is the corresponding author.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing AG
About this paper
Cite this paper
Nguyen, V., Hong, C.S. (2017). An Efficient Multi-channel MAC Protocol for Vehicular Ad Hoc Networks. In: Duy, V., Dao, T., Kim, S., Tien, N., Zelinka, I. (eds) AETA 2016: Recent Advances in Electrical Engineering and Related Sciences. AETA 2016. Lecture Notes in Electrical Engineering, vol 415. Springer, Cham. https://doi.org/10.1007/978-3-319-50904-4_83
Download citation
DOI: https://doi.org/10.1007/978-3-319-50904-4_83
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-50903-7
Online ISBN: 978-3-319-50904-4
eBook Packages: EngineeringEngineering (R0)