
Abstract
We start this book with arguably the simplest theory of a deformable elastic body - that of a string or, as it is also known, a one-dimensional continuum. Our motivation is the development of a theory that can accommodate a range of effects such as gravity, spatial discontinuities in velocity, applied forces which are concentrated at a point, large displacements and stretches, and nonlinear material behavior. This theory is used to develop models for a variety of problems ranging from chains to conveyor belts and bungee cords to hanging cables. Initially a wide range of kinematical results are established. Then, the balance laws are presented and a methodology for using these laws to establish the equations governing the motions of both inextensible and elastic strings is presented.
“In a theory ideally worked out, the progress which we should be able to trace would be, in other particulars, one from less to more, but we may say that, in regard to the assumed physical principles, progress consists in passing from more to less.”
A. E. H. Love [213, Page 1] commenting on the historical development of theories for continuous media.
Access provided by CONRICYT-eBooks. Download chapter PDF
Similar content being viewed by others


1 Introduction
A purely mechanical theory of a string provides a simple model for several systems. In particular, it has been used to model axially moving media and biological filaments. The former is present in cable laying, band saws, textile processes, and drilling strings, among others. Our interest in this chapter lies in establishing the equations of motion for such systems when modeled using a mechanical theory of a string. The developments we present are hopefully of sufficient generality that they provide a unified perspective on the applications which follow in the subsequent chapters.
Among the topics of interest are the possibilities that the string will undergo large motions and large deformations (see Figures 1.1 and 1.2), that it may be subject to singular supplies of power and momentum, and that its motion may have points of discontinuity in strain, unit tangent vector, or velocity vector, among others. In the theory that is presented here, all of these issues are addressed. We base our developments on a series of works by the late Albert E. Green and Paul M. Naghdi and their coworkers. These works are supplemented with a recently developed balance law for material momentum from [264, 278]. The latter allows us to present a systematic development of models for strings that have discontinuities in their motion.

The moving threadline problem. Here, an inextensible string is drawn between the outlet and inlet, and external body forces, such as gravity, are ignored. During the steady motion, the material points of the string move in rectilinear motion at a constant speed which is denoted by V, the string has a constant density ρ, and is in a state of uniform tension which is denoted by P. The transverse perturbations u(χ, t) to this steady motion are governed by a partial differential equation ρ u , tt + 2ρ V u , χ t +ρ V 2 u , χ χ = Pu , χ χ (see, e.g., [57, 363]). For the threadline shown in this figure, \(\chi _{ \text{b}} -\chi _{\text{a}} =\ell\) where ℓ is a constant and χ is a coordinate.

Schematic of a string which is being drawn between an inlet and an outlet. The coordinate χ is used to label the material points passing through the inlet and the outlet and also to parameterize the steady motion that the string performs. The problem shown in this figure was analyzed by O’Reilly [259] and Perkins and Mote [287, 288] for the case when χ a = 0, χ b = ℓ, and ℓ is a constant.
2 Notation and Nomenclature
A wide range of notation and nomenclature will be introduced in this chapter and it is convenient here to summarize the major quantities that we will introduce. In the first table, Table 1.1, most of the kinematical quantities we use are defined. The second table, Table 1.2, presents kinetic quantities.
We denote Euclidean three-space by \(\mathbb{E}^{3}\) and denote a right-handed, fixed Cartesian basis for this space by \(\left \{\mathbf{e}_{1},\mathbf{e}_{2},\mathbf{e}_{3}\right \}\). We also make frequent use of the set of right-handed orthogonal polar coordinate basis vectors:
Here, θ is measured counterclockwise about e 3.
3 Space Curves
We first discuss the case of a curve in Euclidean three-dimensional space (see Figure 1.3). To start, we define the Frenet triad {e t , e n , e b }, and the space curve’s curvature κ and torsion τ. We also discuss the Serret-Frenet relations,
and the handedness of space curves.

A space curve showing the evolution of the Frenet triad.
3.1 The Frenet Triad, Torsion, and Curvature
We assume that the curve is parametrized by an arc-length parameter s. Hence the position of a point on the curve can be defined by specifying its value of s:
A unit tangent vector e t to the curve can be defined:
The derivative of this vector defines the curvature κ and the unit normal vector e n :
That is,
We now use the tangent and normal vectors to define an orthonormal, right-handed triad, known as the Frenet triad:
Here, e b is the unit binormal vector. The Frenet frame is the pairing of the Frenet triad \(\{\mathbf{e}_{t}\left (s_{1}\right ),\mathbf{e}_{n}\left (s_{1}\right ),\mathbf{e}_{b}\left (s_{1}\right )\}\) and a point P 1 on the space curve. The value of the arc-length parameter s = s 1 at the associated point P 1.
Using the fact that the Frenet triad is orthonormal, one defines the (geometric) torsion of the space curve by the relation
Here, the minus sign is conventional.
The curvature and torsion define two important measures for a space curve and we can define them without referring explicitly to the Frenet triad:
where [a, b, c] denotes the scalar triple product. A curve is said to be right-handed if τ > 0 and left-handed if τ < 0 (see Kreyszig [188]). For a curve where \(\mathbf{r} = \mathbf{r}\left (s,t\right )\) we can still calculate the Frenet triad, however we would do so at each instant of time t.
While the relations (1.9) are useful, often a curve is parametrically described by a parameter that is not the arc-length parameter s. In this case, we can establish equivalent relations by repeated application of the chain rule. To elaborate, suppose that r = r(x) where x is a parameter which can be expressed as a function of s: x = x(s). Then, we have
We can conclude from these three representations that
These relations, and particularly the expression for τ, will be used in Chapter 3
The radius of curvature is the inverse of the curvature κ. As can be seen by considering the case of a circle of radius R (cf. Figure 1.4), the radius of curvature is the radius of the largest circle that would be tangent to the curve at the point of interest. Thus, the radius of curvature of a straight line is infinite while the radius of curvature of a circle of radius R is R.

The Frenet triad for a circle of radius R. For this curve, the torsion τ = 0 (because the curve is planar) and the curvature \(\kappa = \frac{1} {R}\). On the left, the direction of increasing s and θ are identical, whereas they are opposite to each other in the right-hand side image.
3.2 The Frenet-Serret Relations
The Frenet-Serret relations are compact expressions of the rate of change of the Frenet-triad basis vectors expressed in the basis \(\left \{\mathbf{e}_{t},\mathbf{e}_{n},\mathbf{e}_{b}\right \}\). They are obtained using the definitions (1.5) and (1.8) and by differentiating the relation e n = e b ×e t :
We can express the Frenet-Serret relations using the compact notation
where
Noting that the Frenet triad is a right-handed frame, then the compact form (1.13) is a statement of the fact that
where Q SF is a rotation (or proper-orthogonal) tensor. That is, \(\mbox{ det}\left (\mathbf{Q}_{\text{SF}}\right ) = 1\) and Q SF T Q SF = I. There are numerous parameterizations for rotation tensors, including Euler angles parameterizations and a unit quaternion parameterization. The former will be discussed at length in Section 5.3.1 of Chapter 5 Footnote 1
Differentiating the identity Q SF T Q SF = I with respect to s, it can be shown that \(\frac{\partial \mathbf{Q}_{\text{SF}}} {\partial s} \mathbf{Q}_{\text{SF}}^{T}\) is skew-symmetric and has an associated axial vector:
The vector \(\boldsymbol{\omega }_{\text{SF}}\) is often called the Darboux vector after the French mathematician Gaston Darboux (1842–1917). The Darboux vector is unusual because it has no e n component: \(\boldsymbol{\omega }_{ \text{SF}} \cdot \mathbf{e}_{n} = 0\). Curiously, if we consider a particle moving along a fixed space curve with a speed v, then the acceleration vector a of the particle is \(\mathbf{a} =\dot{ v}\mathbf{e}_{t} +\kappa v^{2}\mathbf{e}_{n}\) and a ⋅ e b = 0.
Given \(\boldsymbol{\omega }_{\text{SF}}\) and the initial conditions \(\mathbf{e}_{t}\left (s_{0}\right )\), \(\mathbf{e}_{n}\left (s_{0}\right )\), and \(\mathbf{e}_{b}\left (s_{0}\right )\), we can integrate (1.13)1 to find the Frenet triad as a function of s. A further integration, of the differential equation \(\frac{\partial \mathbf{r}} {\partial s} = \mathbf{e}_{t}(s)\), using the resulting values of e t (s) and the initial value \(\mathbf{r}\left (s_{0}\right )\) will yield the space curve \(\mathbf{r}\left (s\right )\).Footnote 2
To help verify the computation of \(\boldsymbol{\omega }_{\text{SF}}\) in later examples, we note that given a skew-symmetric tensor a,
where \(\left \{\mathbf{p}_{1},\mathbf{p}_{2},\mathbf{p}_{3}\right \}\) is a right-handed orthonormal basis for \(\mathbb{E}^{3}\), then the associated axial vector is
We leave it as an exercise to verify that \(\mathbf{a}\mathbf{b} = \mbox{ ax}\left (\mathbf{a}\right ) \times \mathbf{b}\) for any vector b and skew-symmetric tensor a. For future use, we also define an operator which transforms a vector into a skew-symmetric tensor:
where a = a 1 p 1 + a 2 p 2 + a 3 p 3. It is straightforward to verify that \(\mbox{ skew}\left (\mathbf{a}\right )\mathbf{b} = \mathbf{a} \times \mathbf{b}\) for any pair of vectors a and b.
3.3 A Plane Curve
For a plane curve,
Hence,
We define an angle β such that
Consequently, we can use β and two unit vectors,
to conveniently represent the vectors
Hence,
After taking the cross product of e t with e n , we observe that
Hence, for a plane curve, the torsion τ is zero. With some further calculations, we find that the Darboux vector for the plane curve is
We leave it as an exercise to write down a representation for Q SF for a plane curve. In mechanics, the curve with constant curvature and zero torsion is the arc of a circle (see Figure 1.4). Because this is indicative of a constant bending moment, such curves are prominent in the design of many mechanical systems.
3.4 A Circular Helix
The equation for a circular helix (see Figure 1.5) can be expressed as
Here, θ is a cylindrical polar coordinate, and we also recall that

Examples of circular helices showing the evolution of the Frenet triad. The helix in (a) is left-handed (τ < 0) and the helix in (b) is right-handed (τ > 0).
It is common to define a helix using the pitch parameter α. As can be seen from Figure 1.6, the pitch parameter relates θ to z. That is, we can use θ and z as coordinates on a cylinder of radius R. If we cut the cylinder along a vertical line and unfold it, sections of the helix will appear as straight lines with a slope α R.

Examples of Serret-Frenet triads for a portion of a (right-handed) circular helix. The inset image shows the relationship between the pitch angle ς and the parameter α.
For the helix, we can determine the Frenet triad by first differentiating r with respect to s and using the chain rule:
Because e t is a unit vector, we can infer that \(\frac{\partial \theta } {\partial s} = \pm \frac{1} {R\sqrt{1+\alpha ^{2}}}\) and then calculate e t and the other two basis vectors easily. When \(\frac{\partial \theta } {\partial s} > 0\), we find that
Alternatively, when \(\frac{\partial \theta } {\partial s} < 0\), then
Some straightforward calculations of the derivatives of the Frenet triad basis vectors and the use of the chain rule will show that
Hence, if \(\alpha =\tan \left (\varsigma \right ) > 0\,(< 0)\), then the helix is right-handed (left-handed).
Surprisingly, a helix is the only curve with constant curvature and constant nonzero torsion. The Darboux vector for the helix has the interesting representations
The Darboux vector is the axial vector of the skew-symmetric tensor \(\frac{\partial \mathbf{Q}_{\text{SF}}} {\partial s} \mathbf{Q}_{\text{SF}}^{T}\) and an explicit representation for the rotation Q SF for the helix can be found in Eqn. (5.99). We also note that \(\boldsymbol{\omega }_{ \text{SF}}\) is constant and is parallel to the axis of the helix. Observing the complex motion of the Frenet triad as one moves along the helix, this result is surprising and has connections to constant angular velocity motions of rigid bodies, geodesics of the rotation group SO(3), and optometry.Footnote 3 We also note that the results for a circle can be obtained by setting α = 0 in the previous developments. Whence, \(\kappa = \frac{1} {R}\) and τ = 0 for a circle (cf. Figure 1.4).
In applications of rod theories, one often finds that the centerline of the rod is a helical space curve with a known curvature κ and geometric torsion τ. Given τ and κ, one can easily invert (1.33) to determine α and R:
Observe that if the curve is planar, then α = 0 and \(R = \frac{1} {\kappa }\) as expected. An application of the identities (1.35) to a rod bent by terminal moments can be found in Section 5.14 of Chapter 5
4 A Material Curve
We recall, from Green and Naghdi [133, 134], the concept of a material curve \(\mathcal{L}\) which is embedded in three-dimensional Euclidean space \(\mathbb{E}^{3}\). The current configuration \(\mathcal{C}\) of this curve is defined by the vector-valued function \(\mathbf{r} = \mathbf{r}\left (\xi,t\right )\). Here, ξ is a coordinate along \(\mathcal{C}\) which uniquely identifies material points of \(\mathcal{L}\) and r is the position vector of a material point of \(\mathcal{L}\) with respect to a fixed origin (cf. Figure 1.7). As the material curve moves in space, the coordinate ξ associated with a material point remains the same. Consequently, the material coordinate ξ is also known as a convected coordinate. Associated with the inertia of \(\mathcal{L}\) in the present configuration is its mass density per unit length of the coordinate ξ: \(\rho =\rho \left (\xi,t\right )\). A fixed reference configuration \(\mathcal{C}_{0}\) of the material curve is defined by the vector field r = r(ξ). For convenience, we shall assume that ξ is the arc-length parameter of the space curve occupied by \(\mathcal{L}\) in its reference configuration \(\mathcal{C}_{0}\). The arc-length parameter of the space curve occupied by \(\mathcal{L}\) in its present configuration \(\mathcal{C}\) is denoted by s. As we shall presently discuss, the coordinates ξ and s can be related.

The present \(\mathcal{C}\) and reference \(\mathcal{C}_{0}\) configurations of a material curve \(\mathcal{L}\) which has a length ℓ in the reference configuration. The material points ξ = 0 and ξ = ℓ are labeled ∘ and △, respectively.
The position vector r is assumed to be defined relative to a fixed origin O. Taking the partial derivative of \(\mathbf{r}\left (\xi,t\right )\) with respect to t and keeping ξ fixed, we can compute the velocity vector v of the material point:
The superposed dot denotes the material time derivative:
That is, this derivative keeps the material point (identified by ξ) fixed but varies t.
4.1 Stretches, Derivatives, and Velocities
The stretch μ at a material point of \(\mathcal{L}\) in its present configuration is defined to be the magnitude of ∂ r∕∂ ξ:
As a result, the unit tangent vector at a point of \(\mathcal{L}\) in \(\mathcal{C}\) is
where the prime denotes the partial derivative with respect to ξ of a function of ξ and t. Because e t is a unit vector, \(\mathbf{e}_{t} \cdot \dot{\mathbf{e}}_{t} = 0\). It follows from the definition of e t above that
The arc-length parameter s of the space curve occupied by the material curve in its present configuration depends on ξ and t: \(s = s\left (\xi,t\right )\). We tacitly assume that \(\frac{\partial s} {\partial \xi } > 0\) and consequently \(\frac{\partial s} {\partial \xi } =\mu\). Integrating this equation, we see that
It is a good exercise to use (1.40) to show that \(\dot{s} = 0\) for inextensible curves. For inextensible material curves, μ = 1, and s and ξ are often synonymous. The identity (1.40) for such curves implies that either v ′ ⊥ e t or v ′ = 0. In the latter case, which is commonly found, the velocity vector is a piecewise constant function of ξ and can only change its dependency on ξ at discontinuities.
Apart from the coordinates ξ and s, it is also common with axially moving media to use another coordinate system to parameterize the motion of the string:
where c is a constant which can be judiciously chosen to simplify the governing equations. As μ is assumed to be strictly positive, s ′ = μ > 0. In addition, χ ′ = 1. Examples of strings, chains, and cables undergoing motions of this type are considered in Chapter 2
Distinguishing the space curve occupied by the present configuration \(\mathcal{C}\) of \(\mathcal{L}\) and the material curve itself is important. For instance, there are numerous examples in the sequel where the space curve occupied by \(\mathcal{L}\) is fixed in space yet the material curve performs an axial motion. For such motions, the material points of the string move along its length. That is,
where e t is the unit tangent vector to the space curve. As an example, consider the material curve shown in Figure 1.8(a). We join the ends of this curve to form a circular reference configuration \(\mathcal{C}_{0}\) that is illustrated in Figure 1.8(b). The configuration \(\mathcal{C}_{0}\) is then given a uniform stretch μ and rigidly rotated. Two distinct examples of present configurations of \(\mathcal{L}\) are shown in Figures 1.8(c) and (d). In Figures 1.8(c) and (d), the space curve that corresponds to the present configuration is parameterized by an arc-length parameter s and, because of the motion of the material curve along its length, at each instant in time the coordinate s of a material point will vary. The pair of configurations and the labeling of the material points shown in Figures 1.8(c) and (d) are intended as examples to illustrate these aspects of the coordinates ξ and s. The forces required to achieve the deformations shown in Figure 1.8 are discussed in Section 1.7.

(a), Example of a material curve \(\mathcal{L}\); (b), a reference configuration \(\mathcal{C}_{0}\); (c), a deformed configuration where the reference configuration has been given a uniform stretch μ = μ 0; and (d), a deformed configuration where the string has been given a uniform stretch μ = μ 0 and rigidly rotated by 90∘.
While the linear momentum of a material point of the material curve is ρ v, we also introduce the material momentum P per unit length of the curve:
The minus sign in the definition of the material momentum is conventional and follows from Eshelby’s definition of this quantity for a three-dimensional continuum in [103, Eqn. (55)] (cf. Eqn. (8.94) on Page 414). We also note that P is sometimes known as the pseudomomentum. With the help of the definition of the unit tangent vector, it is not difficult to see that P is related to the momentum of the material point along the curve, P = −ρ v ⋅ e t . Later, in Section 2.2.1 of Chapter 2, we shall discuss how P is related to a kinematical quantity championed by William Thomson, Baron Kelvin (1824–1907) that is known as the circulation.
4.2 Functions and Their Derivatives
Any function b(ξ, t) can also be unambiguously written as a function of s and t or of χ and t:
We shall also need to take various partial derivatives of the representations for a function b and it is convenient to define notations for them here:
It should be clear that
We also emphasize that \(\mathbf{b}_{,t}\neq \frac{\partial \hat{\mathbf{b}}} {\partial t}\).
In the sequel we need to evaluate the derivatives of integrals with respect to time. To do this, we use the Leibnitz rule:
Notice how this result simplifies if ξ 1 and ξ 0 are constants.
4.3 Discontinuities
We next consider a point of discontinuity or singular supply at a material point ξ = γ(t) along a string. Such instances are common in applications and a pair of illustrative examples of systems with discontinuities are shown in Figure 1.9. While our developments are quite general and the conditions we present below enable several interesting kinematical results for these systems to be easily inferred, we restrict attention to situations where \(\mathbf{r}\left (\xi,t\right )\) is a continuous function of ξ (i.e., the string does not break apart).

Two classic examples of systems with points of discontinuity. In (a), an inextensible string of length ℓ hangs from one point and exhibits a fold (discontinuity). A particle of mass m is attached to the point ξ = ℓ and an external force F = −F e acts on the particle. In (b), a string leaves a loose heap of stationary string and moves along the table before falling off the edge of the table.
To accommodate discontinuities in a function \(\chi \left (\xi,t\right )\) at ξ = γ, we need to recall standard notation for left- and right-sided limits, and jumps and averages of functions across discontinuities. Thus, the bracket \(\left [\!\left [\chi \right ]\!\right ]_{\gamma }\) denotes the jump of a function \(\chi \left (\xi,t\right )\) at ξ = γ, while \(\left \{\chi \right \}_{\gamma }\) denotes the average value of the left-sided and right-sided limits of the function:
where σ > 0. Because we will be dealing with examples having multiple points of discontinuity, we often use the designations
so the appropriate point of discontinuity can be identified.
Now suppose we are tracking a point P which occupies a different material coordinate ξ at each instant of time: ξ = p(t). Such a situation can be visualized by imagining a bead moving along a string. At a time t, the velocity vector v P of the point P can be considered to have two components: one component can be attributed to the change in the material coordinate of P, and the other arises because of the velocity vector of the material point ξ at ξ = p(t):
You should notice that the velocity vector which can be attributed to the change in p(t) is (as expected) tangent to the material curve. As a simple example, suppose
In this instance, we find that
Thus, if the string was stationary, P’s velocity vector would be exclusively tangent to the string.
We use the previous construction of the velocity vector of a point P to compute representations for the velocity vector v γ of the point of discontinuity. Here, however, we need to take left-sided and right-sided derivatives because the differentiability of v and \(\frac{\partial \mathbf{r}} {\partial \xi }\) are not certain. Consequently, we arrive at two equivalent representations for v γ :
Because the pair of representations are equal we can also write
The corresponding acceleration vector can be defined in a similar manner:
where \(\mathbf{a} =\dot{ \mathbf{v}}\). From the representations for v γ and a γ follow well-known compatibility conditions:
For convenience, we temporarily dropped the subscripts γ that would ornament \(\left [\!\left [\cdot \right ]\!\right ]\) and \(\left \{\cdot \right \}\) in (1.57)–(1.59). The conditions (1.54) and (1.56) express the facts that the velocity v γ and acceleration a γ vectors can be calculated using either left-sided or right-sided limits.
The following identity, which is straightforward to establish, is very useful for manipulating jump conditions:
where c and d are arbitrary vector-valued functions of t and ξ. Another result that is very useful is the ability to move functions which only depend on time into and out of \(\left [\!\left [\cdot \right ]\!\right ]\) and \(\left \{\cdot \right \}\):
for any function f that is independent of ξ.
4.4 Eulerian Formulation
In many areas of application, particularly gas dynamics, the jump conditions are represented in terms of an Eulerian (or spatial) formulation rather than the Lagrangian (or material) formulation which is emphasized in this book. To establish the spatial form of a jump condition one uses the identity \(\mu \frac{\partial } {\partial s} = \frac{\partial } {\partial \xi }\) and the fact that Eqn. (1.41) assigns to each s a unique value of ξ for each instant in time. Thus, we can express any function \(\chi =\chi \left (\xi,t\right )\) as a function of s and t:
With the help of Eqn. (1.54), we find that
Here, s γ corresponds to the value of the arc-length parameter s at the material point ξ = γ:
It is now easy to show that
We refer the reader to texts, such as Liepmann and Roshko [206], on gas dynamics where the Eulerian forms of the forthcoming jump conditions are used and the identity (1.63) can be used to show the relationship between the spatial and Lagrangian formulations of the forthcoming jump conditions.
4.5 Superposed Rigid Body Motions
Consider a string that is deformed in its current configuration \(\mathcal{C}\) at time t. Now, at a time t ⊥ , imagine rigidly rotating and translating this configuration into another configuration which we denote by \(\mathcal{C}^{\perp }\) (see Figure 1.10). We say that the motions r and r ⊥ of the string differ by a superposed rigid body motion:
Here, Q is a proper-orthogonal tensor-valued function of time, Q(t) is a vector-valued function of time, and t ⊥ = t + a with a being constant. Proper-orthogonal tensors are synonymous with rotations and, as mentioned previously, have the properties Q T Q = I and \(\mbox{ det}\left (\mathbf{Q}\right ) = 1\). While there are a wealth of interesting parameterizations for Q, for the present purposes it suffices to recall that a rotation tensor Q can be uniquely described by an axis of rotation i and an angle of rotation θ. The axis of rotation is unaltered by the action of Q: Qi = i.Footnote 4

An example of two motions of a material curve which differ by a rigid body motion. Observe that both motions are relative to the same reference configuration \(\mathcal{C}_{0}\).
Motions which differ by a rigid body motion arise when considering choices of appropriate strain measures and strain energy functions.Footnote 5 If two motions differ by a rigid body motion, we expect the strain and strain energy functions for an elastic string to be the same for both motions. This expectation places restrictions on the strain measures and strain energy functions that we can use.
In the sequel, we will use the stretch μ as a strain measure. It is of interest to compare μ and its counterpart μ ⊥ for the pair of motions which differ by a rigid body motion. To this end, we compute that
To establish the second of these results, we used the identities \(\mathbf{a} \cdot \left (\mathbf{Q}\mathbf{b}\right ) = \left (\mathbf{Q}^{T}\mathbf{a}\right ) \cdot \mathbf{b}\) and QQ T = I. Having shown that μ = μ ⊥ , we conclude that μ is invariant under superposed rigid body motions. This invariance explains its prominent role as a strain measure for elastic strings.
By way of contrast, suppose we were to propose using r ′ ⋅ e 1 as a strain measure. Now if we consider a motion which differs from r by a rigid body motion, then
Whence,
unless we only consider rotations which leave e 1 unchanged: Q T e 1 = e 1. That is, rotations whose axis of rotation are parallel to e 1. However, confining attention to such rotations is overly restrictive and so we conclude that the component r ′ ⋅ e 1 is not an appropriate strain measure.
5 Balance Laws
We are interested in being able to formulate the equations of motion of systems such as that shown in Figure 1.11. This well-studied system has a spring-mass-dashpot system in point contact with a string.Footnote 6 As a result of the point contact at the material point ξ = γ, discontinuities in the contact force n and velocity vector \(\dot{\mathbf{r}}\) are to be expected, and it is nontrivial to formulate the governing equations for this system. Our treatment below is designed to make this task far easier for the system shown in Figure 1.11 and related systems.

Schematic of a string in contact with a spring-mass-dashpot system. The mass m of the spring-mass-dashpot is assumed to be concentrated at the eyelet through which the string can pass, and the position vector of this particle is denoted by x. An applied force F a is assumed to act on the particle. The sole material point of the string in contact with the eyelet is ξ = γ and a force F γ can be used to model the contact force between the eyelet and the string at this material point (cf. [279]).
Motivated by the developments in [12, 132, 230, 251], all of the balance laws we present are of the form
where δ(⋅ ) is the Dirac delta distribution and ξ 1 and ξ 2 are fixed. The fields a, c, d, and e denote functions that are either scalar valued or vector valued. Following [277], we shall assume that the field a is integrable and has a finite number of points of discontinuity where \(\dot{\mathsf{a}}\) is undefined. Apart from this finite number of points, a is assumed to possess a continuous and bounded material time derivative. The function e is assumed to be a bounded function of ξ with a finite number of points of discontinuity. Finally, the function c is assumed to be a bounded function of ξ with a finite number of points where c ′ is undefined but elsewhere this derivative is assumed to be continuous.
5.1 Assigned Forces, Contact Forces, and Material Forces
Preparatory to writing the conservation laws for the material curve, we introduce some additional fields. Pertaining to forces, we introduce the contact force \(\mathbf{n} = \mathbf{n}\left (\xi,t\right )\) and the assigned force per unit mass \(\mathbf{f} = \mathbf{f}\left (\xi,t\right )\).Footnote 7 The forces n and f are familiar forces for string theories and an interpretation of the former is presented in Figure 1.12. The contact force is often known as the tension force and we say that the string is in tension at a point ξ = x if \(\mathbf{n}\left (x^{-},t\right ) \cdot \mathbf{r}^{'}\left (x^{-},t\right ) > 0\). As will become evident in the examples considered in Chapter 2, body forces, such as a gravitational loading, and applied forces on the lateral surface of the string are accommodated by the assigned force ρ μ f. Examples of applied forces on the lateral surface include reaction forces when the string is in contact with a surface and forces modeling an elastic foundation in moving load problems.

A material curve \(\mathcal{L}\) in its present configuration and the contact forces \(\mathbf{n}\left (x^{\pm },t\right )\) at a point ξ = x along its length. The force \(\mathbf{n}\left (x^{-},t\right )\) is the force exerted by the segment to the right of ξ = x on the segment ξ ∈ [0, x) and the force \(-\mathbf{n}\left (x^{+},t\right )\) is the force exerted by the segment to the left of ξ = x on the segment ξ ∈ (x, ℓ]. The jump condition from the balance law of linear momentum (cf. Eqn. (1.86)2) at ξ = x dictates that \(\mathbf{n}\left (x^{-},t\right ) = \mathbf{n}\left (x^{+},t\right )\). Additionally, the local form of the balance of angular momentum for a string (cf. Eqn. (1.84)) requires that n and r ′ are parallel. The material points ξ = 0 and ξ = ℓ are labeled ∘ and △, respectively.
To introduce the two other forces of interest, we first define the strain energy function ψ per unit mass of the string. This enables us to introduce the contact material force C:
Associated with this force, we also have the assigned material body force b per unit length of ξ. Observe that while C has unit of Newtons it can also be interpreted as an energy-density. Throughout the remainder of this book, we will see that changes to C reflect impacts in chains (in Chapter 2), and both the presence (in Section 4.5.3) and absence (in Section 4.6) of adhesion. An elementary example which highlights a role that C can play in examining problems with inhomogeneities is presented in Section 1.8 at the conclusion of the present chapter.
In contrast to n and f, the material (also known as configurational or Eshelbian) forces C and b have only recently garnered attention in the literature. As discussed in the texts [149, 182, 232], this attention has been inspired by the seminal works of Eshelby [101–103].Footnote 8 To help relate the developments in this book to those arising in continuum theories for three-dimensional media, a rapid review of material momentum and its related balance law for a three-dimensional continuum is presented in Sections 8.7 and 8.8 in Chapter 8
In order to cover a wide range of applications, we admit singular supplies of momentum, F γ , material momentum, B γ , angular momentum relative to a fixed point O, \(\mathbf{M}_{O_{\gamma }}\), and power, \(\varPhi _{ \text{E}_{\gamma }}\), at a specific material point ξ = γ(t). For ease of exposition, and without loss of generality, we assume that there is at most one such point. By way of motivation, the force F γ can model a reaction force on a rod or string passing over a sharp obstacle or knife edge (cf. Figure 1.13), an applied force that features in moving load problems (cf., e.g., [112, 255, 280]), or the contact force on a string as it passes through an eyelet such as the one shown in Figure 1.11. The supply B γ will appear in adhesion problems with elastic rods, dissipative shocks in the dynamics of chains (such as the problem shown in Figure 1.13), the deformation of an inhomogeneous bar discussed in Section 1.8, and branching points in rod-based models for tree-like structures [109, 269, 274]. In certain circumstances, −B γ can be identified with an energy release rate and the driving force f in the influential works of Abeyaratne and Knowles [2, 5] on phase transformations.Footnote 9

Cayley’s problem of an inextensible chain. (a) Schematic of the chain as it falls through a hole on a horizontal table and (b) a graphical summary of the singular supplies acting on the chain. A reaction force F γ acts, and a dissipation \(-\varPhi _{\text{E}_{\gamma }}\) of power occurs, at the point where the chain leaves the table. This problem is discussed at length in Section 2.4 of Chapter 2
The supplies F γ and B γ can both perform work and the former can introduce a moment. These respective contributions are related to the sources \(\varPhi _{ \text{E}_{\gamma }}\) and \(\mathbf{M}_{O_{\gamma }}\) using the forthcoming identities Eqns. (1.87) and (1.88) on Page 91.Footnote 10 Motivated by the treatments proposed in Green and Naghdi [132] and Marshall and Naghdi [230], for many problems we will find it convenient to prescribe B γ and F γ and then use the identities to determine \(\mathbf{M}_{O_{\gamma }}\) and \(\varPhi _{\text{E}_{\gamma }}\).
5.2 The Postulated Balance Laws
We adopt the following balance laws for any segment (ξ 1, ξ 2) of the material curve. First, we record the conservation of mass:
The balance of linear momentum is
The balance of material momentum is
The balance of angular momentum relative to the fixed point O is
One also has the balance of energy:
Notice that we are not admitting singular supplies of mass.
As regards dissipation, we note from Eqn. (1.74) that if \(\varPhi _{ \text{E}_{\gamma }} > 0\,(< 0)\), then it serves to increase (decrease) the kinetic energy of the string. As a result, we term the case where \(\varPhi _{ \text{E}_{\gamma }} < 0\) as dissipative. Situations with dissipative \(\varPhi _{\text{E}_{\gamma }}\) arise in the dynamics of chains such as the chain fountain in Section 2.8 and falling folded chains in Section 2.7 As discussed in [231, Appendix A5.2], some researchers view a balance of material momentum as a secondary law, while others grant it a primary status on par with a balance of linear momentum. Based in part on our experiences solving problems in the dynamics of strings and rods with discontinuities, we agree with the latter viewpoint. We also take this opportunity to note that alternative treatments of, and motivations for, a material momentum balance law can be found in the literature. These works include Gurtin [148, 149] who invokes invariance requirements, Kienzler and Herrmann [182, 183] who use Noether’s theorem, and Tomassetti [347] who employs the Principle of Virtual Power.
5.3 Localization Procedure
In the balance laws, we assume that there is one point of discontinuity. Consequently, for the balance of linear momentum (1.71), with the help of Leibnitz rule (1.48),
With this result, Eqn. (1.71) becomes
We now establish the local form of this equation and the associated jump condition. The procedure we discuss is known as the localization procedure (see, e.g., [55] or [105]).
The law (1.76) is supposed to hold for all material segments. So we first choose a segment where there are no sources or discontinuities:
With the aid of the fundamental theorem of calculus, this equation reduces to
Assuming that the integrand is continuous and bounded, then as ξ 1 and ξ 2 are arbitrary, we conclude that
This equation is known as the local form of the balance law.
To establish the jump condition associated with Eqn. (1.76), we shrink the interval: ξ 1 → γ − and ξ 2 → γ +. Noting the fact that the integral of a continuous and bounded function goes to zero as the region of integration goes to zero, we find that the balance law (1.76) reduces to
This is the jump condition associated with the balance of linear momentum (1.76). It can be shown that Eqn. (1.79) combined with Eqn. (1.80) is equivalent to Eqn. (1.71).
5.4 Local Balance Laws
The balance laws (1.70)–(1.74) are used to establish the local balance laws and jump conditions using the procedure discussed in Section 1.5.3. The following local balance laws pertain to all ξ ≠ γ: mass conservation,
and a balance of linear momentum and a conservation of energy, respectively,
As ξ is the arc-length parameter of the reference configuration \(\mathcal{C}_{0}\), ρ 0 is the mass-density per unit reference length of ξ. We also obtain the local form of the balance of material momentum and the balance of angular momentum:
and
The previous equation shows that n must be tangent to the string.
Paralleling a methodology used in continuum mechanics, in the sequel the local form of the five balance laws will be used to generate a partial differential equation to determine r(ξ, t), to provide constitutive equations for n(ξ, t), and to prescribe b:
As will become evident from the examples in the subsequent chapters, this procedure produces a closed set of equations for \(\mathbf{r}\left (\xi,t\right )\). We also take this opportunity to note that our developments are in accordance with Green and Naghdi’s methodology whereby Eqns. (1.82)2 and (1.84) are assumed to be identically satisfied by the constitutive relations for n (cf., e.g., [133]), and Gurtin [149] and Maugin’s [231, Sect. 3] methodology of prescribing a b-like term so that an associated balance law (in our case Eqn. (1.83)) is identically satisfied. An example of such a prescription for an elastic string is discussed in Section 1.6.3 below.
5.5 Jump Conditions
From the balance laws, we find that the following jump conditions must hold at ξ = γ(t):
In writing these conditions, some rearrangements have been performed using Eqn. (1.59).
The jump condition from the mass balance, \(\left [\!\left [\rho _{0}\right ]\!\right ]_{\gamma }\dot{\gamma } = 0\), shows that if the mass density ρ 0 is continuous, then this jump condition is identically satisfied. This situation arises if there are no discontinuous changes in the cross-sectional area of the string or in the mass density per unit volume of the three-dimensional body that it is modeling. Most frequently, it occurs when the string is assumed to be homogeneous. On the other hand, if ρ 0 has a discontinuity at ξ = γ, then this jump condition implies that \(\dot{\gamma }= 0\). That is, the discontinuity is stationary at the material point ξ = γ.
Since it is assumed that \(\left [\!\left [\mathbf{r}\right ]\!\right ]_{\gamma } = \mathbf{0}\), the jump condition (1.86)2 reduces the jump condition (1.86)4 to the identity
That is, the resultant moment relative to the point ξ = γ is 0. We can also interpret this result as implying that the string cannot support a moment. It is interesting to contrast this to the case of a rod which can support a bending moment (cf. Eqn. (5.83)). The jump condition (1.86)5 from the energy equation can be expressed in the formFootnote 11
Note that the force F γ is associated with the velocity of the point on which it acts and B γ is associated with the velocity of the discontinuity along the material curve. The identity (1.88) states that the combined power of these forces is equal to the net power transmitted to the string. In applications of the theory, we will use the identity (1.87) to prescribe \(\mathbf{M}_{O_{\gamma }}\) and we will employ the identity (1.88) to prescribe \(\varPhi _{ \text{E}_{\gamma }}\). Hence, \(\mathbf{M}_{O_{\gamma }}\) and \(\varPhi _{ \text{E}_{\gamma }}\) are not considered to be independent supplies: they are determined by F γ and B γ .
Paralleling the summary presented in Eqn. (1.85) for the local form of the balance laws, for the jump conditions we have
The role of the jump conditions for energy (1.86)5 and material momentum (1.86)3 has been the subject of many recent papers (see [264] for references and further discussion). We note in particular that the role of the jump condition for energy (1.86)5 in producing a differential equation for the evolution of γ as in, e.g., [3, 39, 277, 297] is provided by the material momentum condition (1.86)3. Furthermore, if a variational formulation of the equations of motion for a string is performed, then, with the help of the forthcoming constitutive relations and in the absence of singular supplies, the Weierstrass-Erdmann corner conditions (see Section 9.3.2 in Chapter 9) can be used to establish the jump conditions for linear momentum and material momentum.
6 Elastic Strings and Inextensible Strings
For an elastic string, we assume that the strain energy function ψ depends on the stretch μ and ξ:
If the string is homogenous, then the strain energy function will be independent of ξ: \(\psi =\psi \left (\mu \right )\). We can use our earlier results on motions which differ by a rigid body motion from Section 1.4.5 where we showed that μ ⊥ = μ to also show that ψ for two such motions will have identical values for each material point ξ:
In other words, ψ as given by Eqn. (1.90) is invariant under superposed rigid body motions. This invariance is appealing on physical grounds: it implies that the only method of changing the strain energy at a material point is to change the stretch. In addition, if we subject the entire string to a rigid motion, then its strain energy will not change.
A useful representation for the material time derivative of the function \(\psi \left (\mu,\xi \right )\) can be found with the help of the identity (1.40) for \(\dot{\mu }\):
To establish the constitutive equation for an elastic string, we assume that the local form of the balance of energy (1.82)2 is satisfied for all motionsFootnote 12:
Substituting for \(\dot{\psi }\), this equation reduces to
From the balance of angular momentum (1.84), we know that n = n e t . Consequently, the identity (1.94) simplifies to
This equation is assumed to hold for all v ′. Hence, with the additional assumption that n does not depend on v ′, we conclude that
This is the constitutive equation for a nonlinearly elastic string.
In addition to invariance requirements, it is necessary to consider physically meaningful restrictions on the strain energy function.Footnote 13 For example, if the string is neither in compression nor tension when unstretched (μ = 1), then we should expect that
Further, compressing an element of the string to zero length should require infinite amounts of energy and compressive force:
We also expect that infinite amounts of energy and tensile force are needed to stretch the string indefinitely:
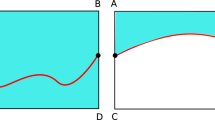
As an example, the strain energy function labeled (ii) and its associated n that are shown in Figure 1.14 satisfy the limit (1.97) and also exhibit the desired extreme behaviors (1.98) and (1.99).

(a) A pair of representative strain energy functions ρ 0 ψ and (b) their associated forces \(n =\rho _{0}\frac{\partial \psi } {\partial \mu }\). For the examples shown, (i) \(\rho _{0}\psi = \frac{EA} {2} \left (\mu -1\right )^{2}\) and (ii) \(\rho _{0}\psi = EA\left (\mbox{ log}\left (\mu +\frac{1} {\mu } - 1\right ) + \left (\mu -1\right )^{4}\right )\).
Not all popular strain energy functions exhibit the extreme features (1.98) and (1.99). For example, consider an elastic string where
Referring to the graph labeled i in Figure 1.14(b), such a string has a tension \(n = EA\left (\mu -1\right )\) that is a linear function of the extension of the string and has the desired behavior (1.97). However, this function does not satisfy Eqn. (1.98). Indeed a finite compressive force − EA is all that is needed to reduce a section of the string to zero length. Consequently, a string modeled with a strain energy function (1.100) would provide questionable results when μ < < 1.
An additional example of a strain energy function for elastic strings is highlighted in Exercises 1.9 and 2.7 and is a three-parameter nonlinear function of the stretch μ. A simplified version of this energy appears in Eqn. (2.10) and is used in the analysis of a steady motion of a closed loop of string. The examples of strain energy functions discussed in this book are far from exhaustive and other examples are easy to construct. However, the parameters in the resulting functions must be evaluated by comparison with experiment and this can be a very challenging task.
6.1 Gibbs Free Energy
Consider an elastic string with a strain energy function \(\rho _{0}\psi \left (\mu,\xi \right )\) and suppose that the constitutive relations
can be inverted, at least locally, to solve for the stretch μ as a function of n:
Then, with the help of a Legendre transformation, we can define a Gibbs free energy functionFootnote 14:
This function can be considered as a dual to the strain energy function.
To see the usefulness of the Gibbs free energy function, observe that
Whence, we find the pair of relations
The Gibbs free energy function can be used to interpret the material contact force C in static problems for elastic strings (cf. [5, Chapter 2]). This energy function is also used by Green et al. [137, 138] to determine constitutive relations for elastic rods.
As an example, consider the strain energy function given by Eqn. (1.100). The associated Gibbs free energy function is readily computed with the help of the intermediate results
Substituting into the definition (1.103), we find that
The resulting Gibbs free energy function is a quadratic function of n. An additional example of a Gibbs free energy function is highlighted in Exercise 1.10.
6.2 Inextensibility
In a purely mechanical string theory, inextensibility is the only internal constraint on a material curve which is invariant under superposed rigid body motions of the curve. Assuming that ξ is the arc-length parameter of \(\mathcal{C}_{0}\), then this constraint is
In this case, r ′ is the unit tangent vector e t to the material curve \(\mathcal{L}\) in \(\mathcal{C}\). The local form of the balance of angular momentum (1.84) implies that n = n e t , and the strain energy function is constant. As a result, the local form of the balance of energy (1.82)2 implies that
This equation is assumed to hold for all v ′ where r ′ ⋅ v ′ = 0.Footnote 15 After assuming that n does not depend on v ′, we conclude that n is parallel to the tangent vector to the material curve in its present configuration:
where the scalar-valued function \(p = p\left (\xi,t\right )\) is known as the tension. As we shall see in the sequel, p must be determined from the balance laws and boundary conditions.Footnote 16
6.3 Identities
Either set of the constitutive relations given by Eqns. (1.96) and (1.110) identically satisfy the local balance of energy (1.82)2 and the local form of the balance of angular momentum (1.84). This parallels the situation presented in Section 1.5.5 for the power \(\varPhi _{ \text{E}_{\gamma }}\) and moment \(\mathbf{M}_{O_{\gamma }}\), respectively.
In addition to the identical satisfaction of the balances of angular momentum and energy, we prescribe the assigned material force b so that the local form of the balance of material momentum is identically satisfied. Thus,
With the help of Eqns. (1.82), (1.83), (1.96), and (1.110), we find that the material force needed to identically satisfy the balance of material momentum is given by the expression
Here, we have used the derivative \(\left (\frac{\partial f} {\partial \xi } \right )_{\text{exp}}\) of a function \(f = f\left (\mathbf{r},\mathbf{r}^{'},\mathbf{v},\xi \right )\):
For example,
Clearly, this derivative is zero if ρ 0 is uniform throughout the string. Furthermore, the derivative of the function ρ 0 ψ in Eqn. (1.112) will be zero if ρ 0 ψ is not an explicit function of ξ. That is, if the string is homogeneous in its reference configuration, then b p = −ρ 0 f ⋅ r ′.
7 Summary of the Governing Equations
For future reference, it is convenient at this stage to summarize the governing equations of motion for the string. For regions of the string where discontinuities are absent, the motion r(ξ, t) of the string is determined by solving the following partial differential equation:
where ρ 0 and f are specified and \(n =\rho _{0}\frac{\partial \psi } {\partial \mu }\) for elastic strings (cf. Eqn. (1.96)) or n = p for inextensible strings (cf. Eqn. (1.110)). For the latter, Eqn. (1.115) is supplemented by the constraint equation (1.108) and the condition that ψ is constant. At a point of discontinuity, the following jump conditions need to be satisfied:
In writing these conditions some rearrangements of Eqns. (1.57) and (1.86)2, 4 were performed with the assistance of the identities (1.58) and (1.59). The jump conditions (1.116) are supplemented by the compatibility conditions:
You may have noticed that the set of jump conditions (1.116) does not contain the jump condition for energy or angular momentum. Their absence is due to the fact that they are considered to be identities for \(\mathbf{M}_{O_{\gamma }}\) and \(\varPhi _{ \text{E}_{\gamma }}\) (see Section 1.5.5).
To illuminate the summary presented above we consider the example of the present configuration of the string shown in Figure 1.8(c). Here, an undeformed circular section of string of length ℓ is given a uniform stretch μ = μ 0, so that its present configuration is described by
The associated unit tangent vector to \(\mathcal{L}\) in \(\mathcal{C}\) is
Substituting into the balance law (1.115) we find that the applied forces needed to sustain this configuration are
Assuming that the string is homogeneous and that F γ = 0 and B γ = 0, we find that the jump conditions (1.116) are all identically satisfied for this configuration. For a homogeneous string, ρ 0, ψ, and, consequently, \(\rho _{0}\frac{\partial \psi } {\partial \mu }\left (\mu =\mu _{0}\right )\) are independent of ξ and we conclude that ρ 0 f points in the radial direction: f ∥ r as expected.
8 An Elementary Example Involving Material Forces
One of the distinct aspects of the summary presented in the previous section is the presence of material forces and material momentum. While many examples involving B γ , C, P, and b will be developed in the coming chapters, it is interesting to consider an elementary example which has distinct ties to earlier works on material forces in continua with defects and inhomogeneities. The example we consider is inspired by the bending of a beam considered in Eshelby [102, Page 142] and Kienzler and Herrmann [183] and studies on phase transformations by Abeyaratne and Knowles [5], Ericksen [98], Heidug and Lehner [161], and Truskinovsky [352, 354], among others. In particular, we explore how the material force C can be related to a potential energy density function and the material supply B γ can be interpreted as an energy release rate and related to Eshelby’s force on a singularity F E and Abeyaratne and Knowles’ driving force f.
Referring to Figure 1.15, we consider a bar which has a discontinuity in its stiffness EA. The undeformed bar has a length ℓ = ℓ 1 + ℓ 2. The segment of the bar of length ℓ 1 has a stiffness EA 1 and the remaining segment has a stiffness EA 2. Terminal forces ± P e 1 are applied to the ends of the bar and we seek to determine the total energy of the bar and its associated loadings. To proceed, we model the bar as a string which, in a reference configuration \(\mathcal{C}_{0}\), has a length ℓ = ℓ 1 + ℓ 2, a strain energy function given by Eqn. (1.100), and a piecewise constant stiffness EA. The deformed string is assumed to be held in a state of static equilibrium by terminal forces F 0 = −P e 1 and F ℓ = P e 1 applied to its ends. No assigned forces are assumed to act on the string: ρ 0 f = 0. In the notation of the previous sections, the discontinuity occurs at γ = ℓ 1 with \(\dot{\gamma }= 0\). Furthermore, r = x e 1 and \(\mu = \frac{\partial x} {\partial \xi }\).

Modeling the static deformation of a bar which has a piecewise constant stiffness. A schematic of the geometry of the undeformed bar of total length ℓ 1 + ℓ 2 is shown in (a). In (b), the reference configuration \(\mathcal{C}_{0}\) of a string (material curve \(\mathcal{L}\)) that is used to model the bar is shown. The material points ξ = 0, ξ = ℓ 1, and ξ = ℓ are labeled ∘, \(\diamond\), and △, respectively. The configuration \(\mathcal{C}\) of the deformed material curve \(\mathcal{L}\) after it has been subjected to terminal forces is shown in (c). For the situation shown in (c), it is assumed that EA 2 < EA 1.
We can use the jump condition (1.116)2 to show that \(\mathbf{n}\left (0^{+},t\right ) = P\mathbf{e}_{1}\) and \(\mathbf{n}\left (\ell^{-},t\right ) = P\mathbf{e}_{1}\).Footnote 17 It is easy to check that the balance of linear momentum, n ′ = 0, is satisfied by the constant contact force n = P e 1 acting in the string. With the help of the constitutive relations \(\mathbf{n} =\rho _{0}\frac{\partial \psi } {\partial \mu }\mathbf{e}_{t}\) we conclude that the string is in a state of piecewise constant stretch:
As a consequence, we find that the contact material force C is piecewise constant:
In agreement with the prescription (1.112), we also observe that the local form of the balance of material momentum, C ′ +b = 0, is satisfied by the prescription b = b p = 0.
The jump condition (1.116)3 associated with the balance of material momentum yields some interesting results. With the help of the expressions presented in Eqn. (1.122) for C, Eqn. (1.116)3 implies that a source of material momentum \(\mathsf{B}_{\ell_{ 1}}\) acts at the point where the discontinuity in stiffness occurs:
If the bar was homogeneous, i.e., EA 1 = EA 2, then \(\mathsf{B}_{\ell_{1}}\) would vanish. Furthermore, for the unloaded bar, P = 0 and μ 1 = μ 2 = 1. In this case,
The behavior of \(\mathsf{B}_{\ell_{1}}\) for various values of the load P and the parameter \(\frac{EA_{2}} {EA_{1}}\) are shown in Figure 1.16. For the purposes of our forthcoming discussion on an interpretation for \(\mathsf{B}_{\ell_{1}}\), it is worthy of note that this quantity can have positive and negative values depending on the ratio of EA 2 to EA 1.

Graphs of the material momentum supply \(\mathsf{B}_{\ell_{ 1}}\) defined by Eqn. (1.123) as a function of the loading parameter \(\frac{P} {EA_{2}}\) for various values of the parameter \(\frac{EA_{2}} {EA_{1}}\). For the graphs shown in this figure: i, \(\frac{EA_{2}} {EA_{1}} = 0.25\); ii, \(\frac{EA_{2}} {EA_{1}} = 0.5\); iii, \(\frac{EA_{2}} {EA_{1}} = 1\); iv, \(\frac{EA_{2}} {EA_{1}} = 2\); and v, \(\frac{EA_{2}} {EA_{1}} = 4\). Observe that the value of the force P is limited by the fact that μ 1 and μ 2 must remain positive.
8.1 Interpretations of \(\mathsf{B}_{\ell_{1}}\) and C
While \(\mathsf{B}_{\ell_{1}}\) and C both have units of Newtons, they do not correspond to physical forces that are required for equilibrium. For the problem of the terminally loaded bar, we now start the process of exploring interpretations for \(\mathsf{B}_{\ell_{ 1}}\) and C. To this end, it is illuminating to establish an expression for the total potential energy of the string. This energy is the sum of the strain energy of the string and the potential energy of the terminal forces. As the potential energy of a constant force is the negative of the inner product of the force vector and the displacement of the material point on which it acts, we find that the potential energy of the string is
where we used the result that n = P e 1 throughout the entire string. From the final representation for Π, it should be apparent that we can express the potential energy simply in terms of C:
Thus, we can interpret the contact material force C as an energy density. This interpretation is useful when attempting to relate the presentation in this book to other works where variational formulations are emphasized.
An interpretation of the material momentum supply \(\mathsf{B}_{\ell_{ 1}}\) can be found using insights on a related problem of a Bernoulli-Euler beam that appears in works by Eshelby [102, Page 142] and Kienzler and Herrmann [183]. Returning to the terminally loaded bar, we now compare two different bars. The first bar, known as bar I, is identical to the one shown in Figure 1.15 and reproduced in Figure 1.17(a). We also consider a similar bar, known as bar II and shown in Figure 1.17(b). In contrast to bar I, the length of the segment whose stiffness is EA 1 has an unloaded length ℓ 1 +δ ℓ 1 and the segment of stiffness EA 2 has an unloaded length of ℓ 2 −δ ℓ 1. Both bars are loaded with the same terminal forces ± P e 1. In the loaded state, the segment of length δ ℓ 1 of bar II has a length μ 1 δ ℓ 1. Computing the stretch μ and material contact force C for bar II in its loaded state is straightforward. Indeed, the resulting expressions for μ and C can be inferred from Eqns. (1.121) and (1.122) with a minimal amount of work. In the sequel, we distinguish quantities associated with the two bars by the respective subscripts I and II.

The static deformations of a pair of bars loaded at their ends by equal and opposite forces. The bars, labeled I and II, are identical in every respect except that the lengths of their undeformed constituent components differ by an amount δ ℓ 1: (a) bar I and (b) bar II.
We now seek to determine which of the two bars have the greater potential energy. It is important to note that both bars have the same overall length ℓ and are subject to the same terminal forces ± P e 1. Comparing the potential energies of both bars, we find the following expression:
We evaluate the integrals on the right-hand side of this expression to find thatFootnote 18
However, the jump in the contact material force is none other than the supply of material momentum. Whence,Footnote 19
Referring to Figure 1.16, we observe that \(\mathsf{B}_{\ell_{ 1}} > 0\) if EA 1 > EA 2 and \(\mathsf{B}_{\ell_{ 1}}\) is negative if EA 1 < EA 2. Consequently, if EA 1 > EA 2 and δ ℓ 1 > 0, then bar II has a greater potential energy than bar I. Expressed in another fashion, given a bar of length ℓ and a given terminal loading, by increasing the portion of material of stiffness EA 1, where EA 1 > EA 2, we increase the potential energy of the bar.
We can also conduct a thought experiment where we imagine that an amount δ ℓ 1 of material of stiffness EA 1 is added (accreted) on bar I at ξ = ℓ 1. The addition of this material is at the expense of a portion of length δ ℓ 1 of material which has a stiffness EA 2. During the accretion process, the terminal loads ± P e 1 remain unchanged. The potential energy of the bar is altered in this process and, following Eshelby (cf. [101, Eqn. (28)], [102, Eqn. (10.1)], or [103, Eqn. (17)]) and his definition of a force on a singularity, we define a material force F E:
where the minus sign in this definition parallels the definition of a conservative force as the negative of the gradient of a potential energy. After observing that
we conclude that Eshelby’s force on a singularity F E is none other than the negative of the supply of material momentum:
Indeed, one can imagine \(F_{\text{E}} = -\mathsf{B}_{\ell_{1}}\) as a force moving the material at ξ = ℓ 1 to ξ = ℓ 1 +δ ℓ 1. The displacement associated with this force is δ ℓ 1 and the product \(F_{\text{E}}\delta \ell_{1} = -\mathsf{B}_{\ell_{1}}\delta \ell_{1}\) is the work performed by this force.
The change in stiffness achieved by the accretion process we have just considered can also be attained by a phase transformation. Here, a segment of length δ ℓ 1 of material with stiffness EA 2 is transformed to a material with a stiffness EA 1.Footnote 20 As emphasized in the works of Abeyaratne and Knowles, a driving force f plays a key role in continuum models for these problems. For the case of interest here, it can be shown that \(f = -\mathsf{B}_{\ell_{1}}\).Footnote 21 Thus, for the static problem at hand where \(\mathbf{F}_{\ell_{ 1}} = \mathbf{0}\), we conclude that
In summary, the singular supply of material momentum \(\mathsf{B}_{\ell_{ 1}}\) is closely related to Eshelby’s force on a singularity F E and Abeyaratne and Knowles’ driving force f. Because f, F E, and \(\mathsf{B}_{\ell_{ 1}}\) can be expressed as a change in potential energy, these quantities can also be identified with an energy release rate.
8.2 A Uniform Bar
To gain additional perspective on the results we have just presented, the problem of a terminally loaded bar composed of a material of uniform stiffness EA is discussed in Exercise 1.8. The results of this exercise demonstrate that, for a bar of a given length ℓ and given terminal forces ± P e 1, the total potential energy of the bar is an increasing function of EA. This conclusion is in agreement with the observations about \(\mathsf{B}_{\ell_{ 1}}\) that we have previously stated.
9 Closing Remarks
This concludes our presentation of a purely mechanical theory of a one-dimensional elastic string. The applications of the theory we will discuss in the next chapter include a wide range of classic problems featuring inextensible strings, the problem of an axially moving elastic string, and a static analysis of a bar with a non-convex strain energy function. These examples are chosen primarily to illuminate the roles played by F γ and B γ in the dynamics of strings. The applications will also provide additional perspectives on the material forces C, b, and B γ , and the material momentum P.
If one assumes uniaxial motions of the string, i.e., \(\mathbf{r}\left (\xi,t\right ) -\mathbf{r}\left (\xi \right ) = u\left (\xi,t\right )\mathbf{e}_{1}\) and e t = e 1, then the theory can also be used to formulate the equations governing the longitudinal displacement u of an elastic bar. The partial differential equation governing \(u = u\left (\xi,t\right )\) is
where the strain energy function ρ 0 ψ depends on \(\frac{\partial u} {\partial \xi }\) and (if the bar is inhomogeneous) ξ. This equation is supplemented by boundary conditions, initial conditions, and a set of jump conditions. The dynamic solutions \(u\left (\xi,t\right )\) have a storied history. In particular, the solutions can exhibit shocks and nonuniqueness. This has lead researchers, including Abeyaratne and Knowles [5], Dafermos [80], LeFloch [202, 203], and Truskinovsky [354], to establish admissibility criteria for solutions, nucleation criteria for shocks to develop, and kinetic relations for driving forces so that unique solutions to problems can be established. Given the excellent texts, such as [5, 80, 202], available on this class of problems they are not discussed in great detail in this book.
10 Exercises
Exercise 1.1:
Consider an elastic string of length ℓ. The reference configuration for the string is defined by \(\mathbf{r}\left (\xi \right ) =\xi \mathbf{e}_{1}\) where \(\xi \in \left [0,\ell\right ]\). During a motion of the string, it is stretched around the circumference of a circle of radius R = R(t):
Compute the stretch μ and the arc-length parameter \(s = s\left (\xi,t\right )\) of the string in its present configuration.
Exercise 1.2:
Suppose a bead P of mass m moves along the present configuration of the string in Exercise 1.1. The material point of the string in contact with the bead at time t ∈ [0, 0. 5] is \(\xi =\ell\sin \left (\pi t\right )\). Show that the velocity vector v P of the bead is
Exercise 1.3:
To establish the identity (1.88) several intermediate results are first established. This exercise explores two of these results. First, with the help of the definition of v γ and the identity (1.58), show that
where the linear momentum density G = ρ 0 v. With the help of this identity, show that
where the kinetic energy density \(T = \frac{1} {2}\rho _{0}\mathbf{v} \cdot \mathbf{v}\).
Exercise 1.4:
With the help of Exercise 1.3, show that the jump conditions (1.86)1, …, 4 and the definition of v γ can be used to reduce the energy jump condition (1.86)5 to the identity (1.88).
Exercise 1.5:
Consider an elastic string, and suppose that the function
is being proposed as a candidate strain energy function ρ ψ. Show that f is not invariant under superposed rigid body motions of the string and argue why it should not be used as a strain energy function.
Exercise 1.6:
Consider a string of length ℓ which has the following mass density function:
Show that v, a, and (in the absence of F γ ) n are continuous at \(\gamma = \frac{\ell} {2}\).
Exercise 1.7:
Recall from Section 1.7 that the jump conditions for material momentum and energy can be expressed in the following manner:
-
(a)
Assuming that the string is elastic with a strain energy function ψ, show that the pair of jump conditions (1.141) can be expressed as
$$\displaystyle\begin{array}{rcl} & \left [\!\left [\rho _{0}\psi \right ]\!\right ]_{\gamma } -\left \{\mathbf{n}\right \}_{\gamma } \cdot \left [\!\left [\mathbf{r}^{'}\right ]\!\right ]_{\gamma } = -\mathbf{F}_{\gamma } \cdot \left \{\mathbf{r}^{'}\right \}_{\gamma } -\mathsf{B}_{\gamma }, & \\ & \left (\left [\!\left [\rho _{0}\psi \right ]\!\right ]_{\gamma } -\left \{\mathbf{n}\right \}_{\gamma } \cdot \left [\!\left [\mathbf{r}^{'}\right ]\!\right ]_{\gamma }\right )\dot{\gamma } = -\varPhi _{\text{E}_{\gamma }} + \mathbf{F}_{\gamma } \cdot \left \{\dot{\mathbf{r}}\right \}_{\gamma }.& {}\end{array}$$(1.142) -
(b)
From the representations (1.142), argue that the jump condition for energy will be trivially satisfied in a statics problem, whereas the jump condition for material momentum is not necessarily identically satisfied.
-
(c)
Show that the driving force f defined in Abeyaratne and Knowles (see [2, Eqn. (2.11)] or [5, Eqn. (2.25)]) corresponds to
$$\displaystyle{ f = \left [\!\left [\rho _{0}\psi \right ]\!\right ]_{\gamma } -\left \{\mathbf{n}\right \}_{\gamma } \cdot \left [\!\left [\mathbf{r}^{'}\right ]\!\right ]_{\gamma }. }$$(1.143)In addition, show that f can be identified with supplies of linear and material momenta:
$$\displaystyle{ f = -\mathbf{F}_{\gamma } \cdot \left \{\mathbf{r}^{'}\right \}_{\gamma } -\mathsf{B}_{\gamma }. }$$(1.144)The corresponding result for a three-dimensional continuum is discussed on Page 418.
Exercise 1.8:
This exercise is intended to complement the discussion in Section 1.8 of the terminally loaded bar. As shown in Figure 1.18, consider a bar of length ℓ composed of a material with a stiffness EA. The bar is modeled as a uniform string with a strain energy function \(\rho _{0}\psi = \frac{EA} {2} \left (\mu -1\right )^{2}\).
-
(a)
Show that the stretch in the string is \(\mu = \frac{P} {EA}\).
-
(b)
Show that the contact material force in the string is
$$\displaystyle{ \mathsf{C} = -\frac{EA} {2} \left (\left ( \frac{P} {EA}\right )^{2} - 1\right ). }$$(1.145) -
(c)
Show that the potential energy of the terminally loaded string is
$$\displaystyle{ \varPi = -\frac{EA\ell} {2} \left (\left ( \frac{P} {EA}\right )^{2} - 1\right ). }$$(1.146) -
(d)
For a given load P, show that Π is an increasing function of the stiffness EA. That is, for a given load, a stiffer bar will have a greater potential energy.
-
(e)
For a given stiffness EA, show that Π is a decreasing (increasing) function of the load P > 0 (P < 0).

Schematic of a bar of stiffness EA that is loaded at its ends by equal and opposite forces ± P e 1. The bar is uniformly stretched by the applied forces and its length changes from ℓ to μ ℓ.
Exercise 1.9:
Consider the following strain energy function:
where α 1, α 2, and α 3 are constants.
-
(a)
Show that the e t component of the contact force n = n e t is
$$\displaystyle{ n =\alpha _{1}\left (\left (\mu -\alpha _{2}\right )^{3} + 1 +\alpha _{ 2}-\mu \right ) +\alpha _{1}\alpha _{3}\left ( \frac{\mu ^{2} - 1} {\mu ^{3} +\mu -\mu ^{2}}\right ). }$$(1.148) -
(b)
If n is assumed to be zero when the string is unstretched, show that
$$\displaystyle{ \alpha _{2} \approx 2.32472. }$$(1.149) -
(c)
Verify the results shown in Figure 1.19.
Fig. 1.19 
(a) The strain energy function ρ 0 ψ given by Eqn. (1.147) and (b) the associated contact force \(n =\rho _{0}\frac{\partial \psi } {\partial \mu }\). For the graphs shown, α 2 ≈ 2. 32472 and α 3 = 0. 1.
-
(d)
Establish the conditions on α 1 and α 3 whereby ρ 0 ψ and n become unbounded as μ ↘ 0 (cf. Eqn. (1.98)).
-
(e)
Suppose that α 1 > 0, α 2 is given by Eqn. (1.149), and α 3 = 0. 1. Show that the equation
$$\displaystyle{ \rho _{0}\frac{\partial \psi } {\partial \mu } = P_{0} }$$(1.150)can have multiple solutions depending on the value of the constant P 0.

Exercise 1.10:
Consider the strain energy function (1.147) and the quadratic strain energy function
where α 1 is a constant which can be identified with the stiffness EA.
-
(a)
Using the definition (1.103) of the Gibbs free energy function ρ 0 ϕ G, compute the corresponding free energy functions.
-
(b)
Verify the results shown in Figure 1.20. The dramatic difference in the behaviors of ρ 0 ϕ G can be attributed to the lack of convexity of the strain energy function (1.147) as a function of μ.
Fig. 1.20 
(a) The strain energy function ρ 0 ψ defined by Eqn. (1.147) (labeled i) and the strain energy function ρ 0 ψ defined by Eqn. (1.151) (labeled ii), and (b) the associated Gibbs free energy functions. For the graphs shown, α 2 ≈ 2. 32472 and α 3 = 0. 1. The arrows in (b) indicate the direction of increasing μ as a function of n.
-
(c)
For the pair of strain energy functions (1.147) and (1.151), compute the corresponding static material contact force C both as a function of μ and as a function of n.
-
(d)
Relate the results of Exercise 1.9(e) to the behavior of ρ 0 ϕ G shown in Figure 1.20 when n ∈ (0. 654306α 1, 1. 43586α 1).

Notes
- 1.
For additional background on Euler angles and other parameterizations of a rotation, the interested reader is referred to the authoritative review [321] by Malcolm Shuster (1943–2012).
- 2.
It is an interesting exercise to perform this integration for a space curve where \(\boldsymbol{\omega }_{\text{SF}}\) is constant. As can be seen from the developments in Section 1.3.4, the resulting curve will either be a circle or a circular helix.
- 3.
- 4.
The representation for a rotation tensor Q in terms of the angle of rotation and axis of rotation is known as Euler’s representation and can be found in Eqn. (5.14) on Page 223.
- 5.
- 6.
- 7.
Details on the continuity and boundedness assumptions on these fields can be inferred from our discussion following (1.68).
- 8.
- 9.
- 10.
- 11.
- 12.
- 13.
- 14.
For further details on the Legendre transformation, we refer the reader to the lucid discussion of this transformation in Lanczos [195].
- 15.
For an inextensible string μ = 1 and, after computing \(\dot{\mu }\), one finds that r ′ ⋅ v ′ = 0.
- 16.
- 17.
- 18.
Alternatively, we could use the Leibnitz rule and the constancy of C to establish the sought-after expression.
- 19.
Observe that Eqn. (1.129) is simply a restatement of the identity \(\varPhi _{\text{E}_{\gamma }} = \mathsf{B}_{\gamma }\dot{\gamma } + \mathbf{F}_{\gamma } \cdot \mathbf{v}_{\gamma }\) (where F γ = 0) applied to the present problem.
- 20.
The strain energy function \(\rho _{0}\psi = \frac{EA} {2} \left (\mu -1\right )^{2}\) is insufficient to examine the phase transformation. Instead, what is required is a strain energy function such as the one shown in Figure 2.5 (cf. Eqn. (2.10)). The computation of C and \(\mathsf{B}_{\ell_{1}}\) for this strain energy function follows our previous developments, but the algebraic details are more complicated and are presented in Exercise 2.7.
- 21.
References
Abeyaratne, R., Knowles, J.K.: Kinetic relations and the propagation of phase boundaries in solids. Archive for Rational Mechanics and Analysis 114 (2), 119–154 (1991). URL http://dx.doi.org/10.1007/BF00375400
Abeyaratne, R., Knowles, J.K.: Nucleation, kinetics and admissibility criteria for propagating phase boundaries. In: R. Fosdick, E. Dunn, H. Slemrod (eds.) Shock induced transitions and phase structures in general media, IMA Volumes in Mathematics and its Applications, vol. 52, pp. 1–33. Springer-Verlag, New York (1993). URL http://dx.doi.org/10.1007/978-1-4613-8348-2_1
Abeyaratne, R., Knowles, J.K.: Evolution of Phase Transitions: A Continuum Theory. Cambridge University Press, Cambridge (2006). URL http://dx.doi.org/10.1017/CBO9780511547133
Antman, S.S.: Nonlinear Problems of Elasticity, Applied Mathematical Sciences, vol. 107, second edn. Springer-Verlag, New York (2005)
Burridge, R., Keller, J.B.: Peeling, slipping and cracking - Some one-dimensional free-boundary problems in mechanics. SIAM Review 20 (1), 31–61 (1978). URL http://dx.doi.org/10.1137/1020003
Casey, J., Carroll, M.M.: Discussion of “A treatment of internally constrained materials” by J. Casey. ASME Journal of Applied Mechanics 63 (1), 240 (1996). URL http://dx.doi.org/10.1115/1.2787205
Chadwick, P.: Continuum Mechanics, second corrected and enlarged edn. Dover Publications, New York (1999)
Chen, J.S.: Natural frequencies and stability of an axially-travelling string in contact with a stationary load system. ASME Journal of Vibration and Acoustics 119 (2), 152–157 (1997). URL http://dx.doi.org/10.1115/1.2889696
Chen, L.Q.: Analysis and control of transverse vibrations of axially moving strings. ASME Applied Mechanics Reviews 58 (2), 91–116 (2005). URL http://dx.doi.org/10.1115/1.1849169
Cheng, S.P., Perkins, N.C.: The vibration and stability of a friction-guided, translating string. Journal of Sound and Vibration 144 (2), 281–292 (1991). URL http://dx.doi.org/10.1016/0022-460X(91)90749-A
Dafermos, C.M.: Hyperbolic Conservation Laws in Continuum Physics, Grundlehren der Mathematischen Wissenschaften [Fundamental Principles of Mathematical Sciences], vol. 325, fourth edn. Springer-Verlag, Berlin (2016). URL http://dx.doi.org/10.1007/978-3-662-49451-6
Ericksen, J.L.: Equilibrium of bars. Journal of Elasticity 5 (3), 191–201 (1975). URL http://dx.doi.org/10.1007/BF00126984
Eshelby, J.D.: The force on an elastic singularity. Philosophical Transactions of the Royal Society of London. Series A. Mathematical and Physical Sciences 244, 84–112 (1951). URL http://dx.doi.org/10.1098/rsta.1951.0016
Eshelby, J.D.: The continuum theory of lattice defects. In: F. Seitz, D. Turnbull (eds.) Solid State Physics, vol. 3, pp. 79–144. Academic Press (1956). URL http://dx.doi.org/10.1016/S0081-1947(08)60132-0
Eshelby, J.D.: Energy relations and the energy-momentum tensor in continuum mechanics. In: J.M. Ball, D. Kinderlehrer, P. Podio-Guidugli (eds.) Fundamental contributions to the continuum theory of evolving phase interfaces in solids, pp. 82–119. Springer-Verlag, Berlin (1999). URL http://dx.doi.org/10.1007/978-3-642-59938-5_5
Eshelby, J.D.: Collected Works of J. D. Eshelby. The Mechanics of Defects and Inhomogeneities. Springer-Verlag, Berlin (2006). Edited by X. Markenscoff and A. Gupta.
Estrada, R., Kanwal, R.P.: Nonclassical derivation of the transport theorems for wave fronts. Journal of Mathematical Analysis and Applications 159 (1), 290–297 (1991). URL http://dx.doi.org/10.1016/0022-247X(91)90236-S
Faruk Senan, N.A., O’Reilly, O.M., Tresierras, T.N.: Modeling the growth and branching of plants: A simple rod-based model. J. Mech. Phys. Solids 56 (10), 3021–3036 (2008). URL http://dx.doi.org/10.1016/j.jmps.2008.06.005
Gavrilov, S.: Nonlinear investigation of the possibility to exceed the critical speed by a load on a string. Acta Mechanica 154 (1), 47–60 (2002). URL http://dx.doi.org/10.1007/BF01170698
Green, A.E., Naghdi, P.M.: A derivation of jump condition for entropy in thermomechanics. Journal of Elasticity 8 (2), 119–182 (1978). URL http://dx.doi.org/10.1007/BF00052481
Green, A.E., Naghdi, P.M.: On thermal effects in the theory of rods. International Journal of Solids and Structures 15 (11), 829–853 (1979). URL http://dx.doi.org/10.1016/0020-7683(79)90053-2
Green, A.E., Naghdi, P.M.: A direct theory of viscous fluid flow in pipes. I: Basic general developments. Philosophical Transactions of the Royal Society. London. Series A. Mathematical, Physical and Engineering Sciences 342 (1666), 525–542 (1993). URL http://dx.doi.org/10.1098/rsta.1993.0031
Green, A.E., Naghdi, P.M., Wenner, M.L.: On the theory of rods. I Derivations from three-dimensional equations. Proceedings of the Royal Society. London. Series A. Mathematical, Physical and Engineering Sciences 337 (1611), 451–483 (1974). URL http://dx.doi.org/10.1098/rspa.1974.0061
Green, A.E., Naghdi, P.M., Wenner, M.L.: On the theory of rods. II Developments by direct approach. Proceedings of the Royal Society. London. Series A. Mathematical, Physical and Engineering Sciences 337 (1611), 485–507 (1974). URL http://dx.doi.org/10.1098/rspa.1974.0062
Green, A.E., Rivlin, R.S.: On Cauchy’s equations of motion. Zeitschrift für Angewandte Mathematik und Physik. ZAMP. Journal of Applied Mathematics and Physics. Journal de Mathématiques et de Physique Appliquées 15 (3), 290–292 (1964). URL http://dx.doi.org/10.1007/BF01607019
Gurtin, M.E.: The nature of configurational forces. Archive for Rational Mechanics and Analysis 131 (1), 67–100 (1995). URL http://dx.doi.org/10.1007/BF00386071
Gurtin, M.E.: Configurational Forces as Basic Concepts of Continuum Physics, Applied Mathematical Sciences, vol. 137. Springer-Verlag, New York (2000)
Heidug, W., Lehner, F.K.: Thermodynamics of coherent phase transformations in nonhydrostatically stressed solids. Pure and Applied Geophysics 123 (1), 91–98 (1985). URL http://dx.doi.org/10.1007/BF00877051
Kienzler, R., Herrmann, G.: Mechanics in Material Space: With Applications to Defect and Fracture Mechanics. Springer-Verlag, Berlin (2000)
Kienzler, R.R., Herrmann, G.G.: On material forces in elementary beam theory. ASME Journal of Applied Mechanics 53 (3), 561–564 (1986). URL http://dx.doi.org/10.1115/1.3171811
Kreyszig, E.: Differential Geometry, Revised and reprinted edn. Toronto University Press, Toronto (1964)
Lanczos, C.: The Variational Principles of Mechanics, fourth edn. University of Toronto Press, Toronto (1970)
Lee, S.Y., Mote, Jr., C.D.: Travelling wave dynamics in a translating string coupled to stationary constraints: Energy transfer and mode localization. Journal of Sound and Vibration 212 (1), 1–22 (1998). URL http://dx.doi.org/10.1006/jsvi.1997.1285
LeFloch, P.G.: Hyperbolic Systems of Conservation Laws. Lectures in Mathematics ETH Zürich. Birkhäuser Verlag, Basel (2002). URL http://dx.doi.org/10.1007/978-3-0348-8150-0
LeFloch, P.G., Mohammadian, M.: Why many theories of shock waves are necessary: Kinetic functions, equivalent equations, and fourth-order models. Journal of Computational Physics 227 (8), 4162–4189 (2008). URL http://dx.doi.org/10.1016/j.jcp.2007.12.026
Liepmann, H.W., Roshko, A.: Elements of Gas Dynamics. John Wiley & Sons, Inc., New York (1957)
Love, A.E.H.: A Treatise on the Mathematical Theory of Elasticity, fourth edn. Cambridge University Press, Cambridge (1927)
Marshall, J.S., Naghdi, P.M.: A thermodynamical theory of turbulence. I. Basic developments. Philosophical Transactions of the Royal Society of London. Series A. Mathematical and Physical Sciences 327 (1595), 415–448 (1989). URL http://dx.doi.org/10.1098/rsta.1989.0001
Maugin, G.A.: Material forces: concepts and applications. ASME Applied Mechanics Reviews 48 (5), 213–245 (1995). URL http://dx.doi.org/10.1115/1.3005101
Maugin, G.A.: Configurational forces: Thermomechanics, physics, mathematics, and numerics. CRC Series: Modern Mechanics and Mathematics. CRC Press, Boca Raton, FL (2011)
Nordenholz, T.R., O’Reilly, O.M.: On steady motions of an elastic rod with application to contact problems. International Journal of Solids and Structures 34 (9), 1123–1143 & 3211–3212 (1997). URL http://dx.doi.org/10.1016/S0020-7683(96)00054-6
Novelia, A., O’Reilly, O.M.: On geodesics of the rotation group SO(3). Regular and Chaotic Dynamics 20 (6), 729–738 (2015). URL http://dx.doi.org/10.1134/S1560354715060088
Novelia, A., O’Reilly, O.M.: On the dynamics of the eye: geodesics on a configuration manifold, motions of the gaze direction and Helmholtz’s theorem. Nonlinear Dynamics 80 (3), 1303–1327 (2015). URL http://dx.doi.org/10.1007/s11071-015-1945-0
Olsson, M.: On the fundamental moving load problem. Journal of Sound and Vibration 145 (2), 299–307 (1991). URL http://dx.doi.org/10.1016/0022-460X(91)90593-9
O’Reilly, O.M.: On steady motions of a drawn cable. ASME Journal of Applied Mechanics 63 (1), 180–189 (1996). URL http://dx.doi.org/10.1115/1.2787196
O’Reilly, O.M.: The energy jump condition for thermomechanical media in the presence of configurational forces. Continuum Mechanics and Thermodynamics 18 (6), 361–365 (2007). URL http://dx.doi.org/10.1007/s00161-006-0036-3
O’Reilly, O.M.: A material momentum balance law for rods. Journal of Elasticity 86 (2), 155–172 (2007). URL http://dx.doi.org/10.1007/s10659-006-9089-6
O’Reilly, O.M., Payen, S.: The attitudes of constant angular velocity motions. International Journal of Non-Linear Mechanics 41 (6–7), 1–10 (2006). URL http://dx.doi.org/10.1016/j.ijnonlinmec.2006.05.001
O’Reilly, O.M., Peters, D.M.: Nonlinear stability criteria for tree-like structures composed of branched elastic rods. Proceedings of the Royal Society of London. Series A: Mathematical, Physical and Engineering Sciences 468 (2137), 206–226 (2012). URL http://dx.doi.org/10.1098/rspa.2011.0291
O’Reilly, O.M., Tresierras, T.N.: On the static equilibria of branched elastic rods. International Journal of Engineering Science 49 (2), 212–227 (2011). URL http://dx.doi.org/10.1016/j.ijengsci.2010.11.008
O’Reilly, O.M., Varadi, P.C.: A treatment of shocks in one-dimensional thermomechanical media. Continuum Mechanics and Thermodynamics 11 (6), 339–352 (1999). URL http://dx.doi.org/10.1007/s001610050116
O’Reilly, O.M., Varadi, P.C.: On energetics and conservations for strings in the presence of singular sources of momentum and energy. Acta Mechanica 165 (1–2), 27–45 (2003). URL http://dx.doi.org/10.1007/s00707-003-0032-7
O’Reilly, O.M., Varadi, P.C.: On some peculiar aspects of axial motions of closed loops of string in the presence of a singular supply of momentum. ASME Journal of Applied Mechanics 71 (4), 541–545 (2004). URL http://dx.doi.org/10.1115/1.1756139
Ouyang, H.: Moving-load dynamic problems: A tutorial (with a brief overview). Mechanical Systems and Signal Processing 25 (6), 2039–2060 (2011). URL http://dx.doi.org/10.1016/j.ymssp.2010.12.010
Perkins, N.C., Mote, Jr., C.D.: Three dimensional vibration of travelling elastic cables. Journal of Sound and Vibration 114 (2), 325–340 (1987). URL http://dx.doi.org/10.1016/S0022-460X(87)80157-8
Perkins, N.C., Mote, Jr., C.D.: Theoretical and experimental stability of two translating cable equilibria. Journal of Sound and Vibration 128 (3), 397–410 (1989). URL http://dx.doi.org/10.1016/0022-460X(89)90782-7
Reeken, M.: The equation of motion of a chain. Mathematische Zeitschrift 155 (3), 219–237 (1977). URL http://dx.doi.org/10.1007/BF02028442
Schajer, G.S.: The vibration of a rotating circular string subject to a fixed elastic restraint. Journal of Sound and Vibration 92 (1), 11–19 (1984). URL http://dx.doi.org/10.1016/0022-460X(84)90369-9
Shuster, M.D.: A survey of attitude representations. American Astronautical Society. Journal of the Astronautical Sciences 41 (4), 439–517 (1993)
Steinmann, P., Maugin, G.A. (eds.): Mechanics of Material Forces, Advances in Mechanics and Mathematics, vol. 11. Springer-Verlag, New York (2005). URL http://dx.doi.org/10.1007/b137232
Tian, J., Hutton, S.G.: Lateral vibrational instability mechanisms in a constrained rotating string. ASME Journal of Applied Mechanics 65 (3), 774–776 (1998). URL http://dx.doi.org/10.1006/jsvi.1999.2237
Tian, J., Hutton, S.G.: On the mechanisms of vibrational instability in a constrained rotating string. Journal of Sound and Vibration 225 (1), 111–126 (1999). URL http://dx.doi.org/10.1006/jsvi.1999.2237
Tomassetti, G.: On configurational balance in slender bodies. Archive of Applied Mechanics 81 (8), 1041–1050 (2010). URL http://dx.doi.org/10.1007/s00419-010-0470-3
Truesdell, C., Noll, W.: The Non-Linear Field Theories of Mechanics, third edn. Springer-Verlag, Berlin (2004). Edited, and with a preface, by Stuart S. Antman
Truskinovskii, L.M.: Equilibrium phase interfaces. Soviet Physics Doklady 27 (7), 551–552 (1982)
Truskinovsky, L.: Kinks versus shocks. In: R. Fosdick, E. Dunn, H. Slemrod (eds.) Shock induced transitions and phase structures in general media, IMA Volumes in Mathematics and its Applications, vol. 52, pp. 185–229. Springer-Verlag, New York (1993). URL http://dx.doi.org/10.1007/978-1-4613-8348-2_11
Wickert, J.A., Mote, Jr., C.D.: On the energetics of axially moving continua. Journal of the Acoustical Society of America 85 (3), 1365–1368 (1989). URL http://dx.doi.org/10.1121/1.397418
Author information
Authors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing AG
About this chapter
Cite this chapter
O’Reilly, O.M. (2017). Mechanics of a String. In: Modeling Nonlinear Problems in the Mechanics of Strings and Rods. Interaction of Mechanics and Mathematics. Springer, Cham. https://doi.org/10.1007/978-3-319-50598-5_1
Download citation
DOI: https://doi.org/10.1007/978-3-319-50598-5_1
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-50596-1
Online ISBN: 978-3-319-50598-5
eBook Packages: EngineeringEngineering (R0)