
Abstract
This chapter presents a novel Robust Adaptive Interval Type-2 Fuzzy Logic Controller (RAIT2FLC) equipped with an adaptive algorithm to achieve synchronization performance for fractional order chaotic systems. In this work, by incorporating the \( H^{\infty } \) tracking design technique and Lyapunov stability criterion, a new adaptive fuzzy control algorithm is proposed so that not only the stability of the adaptive type-2 fuzzy control system is guaranteed but also the influence of the approximation error and external disturbance on the tracking error can be attenuated to an arbitrarily prescribed level via the H ∞ tracking design technique. The main contribution in this work is the use of the interval type-2 fuzzy logic controller and the numerical approximation method of Grünwald-Letnikov in order to improve the control and synchronization performance comparatively to existing results. By introducing the type-2 fuzzy control design and robustness tracking approach, the synchronization error can be attenuated to a prescribed level, even in the presence of high level uncertainties and noisy training data. A simulation example on chaos synchronization of two fractional order Duffing systems is given to verify the robustness of the proposed AIT2FLC approach in the presence of uncertainties and bounded external disturbances.
Access provided by CONRICYT-eBooks. Download chapter PDF
Similar content being viewed by others


Keywords
- Robust adaptive control
- Interval type-2 fuzzy
- Upper and lower membership functions fractional systems
- Chaos synchronization
- Stability
1 Introduction
Fractional calculus deals with derivatives and integrations of arbitrary order [41, 53] and has found many applications in many fields of physics, applied mathematics and engineering. Moreover, many real-world physical systems are well characterized by fractional order differential equations, i.e., equations involving both integer and non integer order derivatives [25]. It is observed that the description of some systems is more accurate when the fractional derivative is used. For instance, electrochemical processes and flexible structures are modeled by fractional order models [38, 41]. Nowadays, many fractional-order differential systems behave chaotically, such as the fractional-order Chua system [52], the fractional-order Duffing system [2], the fractional-order Lu system, the fractional order Chen system [51].
Recently, due to its potential applications in secure communication and control processing, the study of chaos synchronization in fractional order dynamical systems and related phenomena is receiving growing attention.
The synchronization problem of fractional order chaotic systems was first investigated by Deng and Li who carried out synchronization in the case of the fractional Lü system. Afterwards, they studied chaos synchronization of the Chen system with a fractional order in a different manner [18, 19].
Fuzzy logic controllers are generally considered applicable to plants that are mathematically poorly understood and where experienced human operators are available for providing a qualitative “rule of thumb”.
Based on the universal approximation theorem [11, 60] (fuzzy logic controllers are general enough to perform any nonlinear control actions) there is rapidly growing interest in systematic design methodologies for a class of nonlinear systems using fuzzy adaptive control schemes. An adaptive fuzzy system is a fuzzy logic system equipped with a training algorithm in which an adaptive controller is synthesized from a collection of fuzzy IF–THEN rules and the parameters of the membership functions characterizing the linguistic terms in the IF–THEN rules change according to some adaptive law for the purpose of controlling a plant to track a reference trajectory.
In this work we consider Type-2 fuzzy sets which are extension of type-1 fuzzy sets introduced in the first time by Zadeh [66]. Basic concepts of type-2 fuzzy sets and systems were advanced and well established in [9, 20, 45, 54]. In 1998, Mendel and Karnik [20] introduced five different kinds of type reduction methods which are extended versions of type-1 defuzzification methods. Qilian and Mendel [54] proposed an efficient and simplified method for computing the input and antecedent operations for interval type-2 fuzzy logic controller (IT2FLC) using the concept of upper and lower Membership functions. Karnik and Mendel developed the centroid of an interval type-2 fuzzy set (IT2FS), not only for an IT2FS and IT2FLCs but also for general type-2 FSs and introduced an algorithm for its computation. Mendel [17, 44] described important advances for both general and interval type-2 fuzzy sets and systems in 2007. Because of the calculation complexity especially in the type reduction, use of IT2FLC is still controversial. Seplveda et al. showed that using adequate hardware implementation, IT2FLC can be efficiently utilized in applications that require high speed processing. Thus, the type-2 FLS has been successfully applied to several fuzzy controller designs [12, 17, 36, 42, 62].
In this paper, by incorporating the \( H^{\infty } \) tracking design technique [35, 38, 43] and Lyapunov stability criterion, a new adaptive fuzzy control algorithm is proposed so that not only the stability of the adaptive type-2 fuzzy control system is guaranteed but also the influence of the approximation error and external disturbance on the tracking error can be attenuated to an arbitrarily prescribed level via the \( {H}^\infty \) tracking design technique. The proposed design method attempts to combine the attenuation technique, type-2 fuzzy logic approximation method, and adaptive control algorithm for the robust tracking control design of the nonlinear fractional order systems with a large uncertainty or unknown variation in plant parameters and structures.
This chapter is organized as follows: Sect. 2 presents a brief review on the state of the art for the addressed problem. In Sect. 3, an introduction to fractional derivatives and its relation to the approximation solution will be addressed and the basic definition and preliminaries for fractional order systems. A description of the interval type-2 fuzzy logic is presented in Sect. 4. Section 5 and 6 generally propose adaptive type-2 fuzzy robust \( H^{\infty } \) control of uncertain fractional order systems in the presence of uncertainty and its stability analysis. In Sect. 7, application of the proposed method on fractional order expression chaotic systems (Duffing oscillator) is investigated. Finally, the simulation results and conclusion will be presented in Sect. 8.
2 Related Work: A Brief Review
Fractional adaptive control is a growing research topic gathering the interest of a great number of researchers and control engineers [32]. The main argument of this community is the significant enhancement obtained with these new real-time controllers comparatively to integer order ones [53].
Since the pioneering works of Vinagre et al. [59] and Ladaci and Charef [26, 27], an increasing number of works are published focusing on various fractional order adaptive schemes such as: fractional order model reference adaptive control [13, 27, 63], fractional order adaptive pole placement control [34], fractional high-gain adaptive control [29], fractional multi-model adaptive control [33], robust fractional adaptive control [30], fractional extremum seeking control [48], Fractional IMC-based adaptive control [31], fractional adaptive sliding mode control [15], fractional adaptive PID control [28, 47] … etc.
The study and design of fractional adaptive control laws for nonlinear systems is also an actual leading research direction [5, 6, 50, 57]. Many control strategies have been proposed in literature to deal with the control and synchronization problems of various nonlinear and chaotic fractional order systems [1, 55]. Nonlinear fractional adaptive control is wide meaning concept with many different control approaches such as: fractional order adaptive backstepping output feedback control scheme [64], adaptive feedback control scheme based on the stability results of linear fractional order systems [49], Adaptive Sliding Control [36, 65], Adaptive synchronization of fractional-order chaotic systems via a single driving variable [67], H∞ robust adaptive control [22, 37], etc. Whereas, in order to deal with nonlinear systems presenting uncertainties or unknown model parameters, many authors have used fuzzy systems [3, 7, 8, 58]. In this work, we use Type-2 Fuzzy logic systems [4, 40].
3 Basic Preliminaries for Fractional Order Systems
Fractional calculus (integration and differentiation of arbitrary ‘fractional’ order) is an old concept which dates back to Cauchy, Riemann Liouville and Leitnikov in the 19th century. It has been used in mechanics since at least the 1930s and in electrochemistry since the 1960s. In control field, several theoretical physicists and mathematicians have studied fractional differential operators and systems [14, 53].
Fractional order operator is a generalization of integration and differentiation to non integer order fundamental operators, denoted by \( _{a} D_{t}^{\alpha } \) , where a and t are the limits of the operator. This operator is a notation for taking both the fractional integral and functional derivative in a single expression defined as [22,23,24, 51]:
There are some basic definitions of the general fractional integration and differentiation. The commonly used definitions are those of Riemann–Liouville and Grünwald-Letnikov [29, 30, 56].
The Riemann-Liouville (R-L) integral of order λ > 0 is defined as:
and the expression of the R-L fractional order derivative of order μ > 0 is:
with Г(.) is the Euler’s gamma function and the integer n is such that (n − 1) < μ < n. This fractional order derivative of Eq. (3) can also be defined from Eq. (2) as:
The Grünwald–Letnikov definition of the fractional derivative, is expressed as:
where \( \left[ {\frac{t - q}{h}} \right] \) indicates the integer part and \( ( - 1)^{j} \left( {\begin{array}{*{20}c} q \\ j \\ \end{array} } \right) \) are binomial coefficients \( c_{j}^{(q)} \left( {j = 0,1, \ldots } \right). \)
The calculation of these coefficients is done by formula of following recurrence:
The general numerical solution of the fractional differential equation:
can be expressed as follows:
The Fundamental Predictor-Corrector Algorithm
The fractional Adams-Bashforth-Moulton method used to approximate the fractional order integral operator was introduced in [14]. In fact it is more practical to use a numerical fractional integration method to compute fractional order integration or derivation as the approximating transfer functions are of relatively high orders.
Consider the differential equation
with initial conditions:
where \( m = [\alpha ] \) and the real numbers \( y^{(k)} (0) = y_{0}^{(k)} , \) \( k = 0,1, \ldots ,m - 1, \) are assumed to be given.
The basics of this technique take profit of an interesting analytical property: the initial value problem (4), (5) is equivalent to the Volterra integral equation
Introducing the equispaced nodes \( t_{j} = jh \) with some given \( h > 0 \) and by applying the trapezoidal integral technique to compute (6), the corrector formula becomes
where
and \( y_{h}^{P} (t_{n + 1} ) \) is given by,
where now
This approximation of the fractional derivative within the meaning of Grünwald-Letnikov is on the one hand equivalent to the definition of Riemann-Liouville for a broad class of functions [46], on the other hand, it is well adapted to the definition of Caputo (Adams method) because it requires only the initial conditions and has a physical direction clearly. In this work, the Grünwald–Letnikov method is used for numerical evaluation of the fractional derivative.
4 Interval Type-2 Fuzzy Systems
A brief overview of the basic concepts of Interval type-2 fuzzy systems is presented in the following [21, 37, 40]. If we consider a type-1 membership function, as in Fig. 1, then a type-2 membership function can be produced. In this case, for a specific value \( x^{{\prime }} \) the membership function \( (u^{{\prime }} ) \), takes on different values, which are not all weighted the same, so we can assign membership grades to all of those points.

Example of a type-1 membership function
A type-2 fuzzy set in a universal set X is denoted as \( \tilde{A} \) and can be characterized in the following form:
in which \( 0 \le \mu_{{\tilde{A}}} (x) \le 1 \).
The 2-D interval type-2 Gaussian membership function with uncertain mean \( {\text{m}} \in [{\text{m}}_{1} ,{\text{m}}_{2} ] \) and a fixed deviation \( \sigma \) is shown in Fig. 2.

Interval type-2 membership function
A fuzzy logic system (FLS) described using at least one type-2 fuzzy set is called a type-2 FLS. Type-1 FLSs are unable to directly handle rule uncertainties, because they use type-1 fuzzy sets that are certain. On the other hand, type-2 FLSs, are useful in circumstances where it is difficult to determine an exact numeric membership function, and there are measurement uncertainties [40].
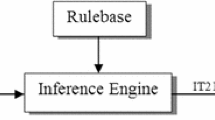
A type-2 FLS is characterized by IF–THEN rules, where their antecedent or consequent sets are now of type-2. Type-2 FLSs, can be used when the circumstances are too uncertain to determine exact membership grades such as when the training data is affected by noise. Similarly, to the type-1 FLS, a type-2 FLS includes a fuzzifier, a rule base, fuzzy inference engine, and an output processor, as we can see in Fig. 3 for a Mamdani-model.

Type-2 fuzzy logic system
An IT2FS is described by its Lower \( \underline{\mu }_{{\tilde{A}}} (x) \) and Upper \( \bar{\mu }_{{\tilde{A}}} (x) \) membership functions. For an IT2FS, the footprint of uncertainty (FOU) is described in terms of lower and upper MFs as:
The type-reducer generates a type-1 fuzzy set output, which is then converted in a numeric output through running the defuzzifier. This type-1 fuzzy set is also an interval set, for the case of our FLS we used center of sets type reduction, \( {\text{y}}({\text{X}}) \) which is expressed as [10] :
where \( y_{l} = \frac{{\mathop \sum \nolimits_{i = 1}^{M} f_{l}^{i} y_{l}^{i} }}{{\mathop \sum \nolimits_{i = 1}^{M} f_{l}^{i} }} \) and \( y_{r} = \frac{{\mathop \sum \nolimits_{i = 1}^{M} f_{r}^{i} y_{r}^{i} }}{{\mathop \sum \nolimits_{i = 1}^{M} f_{r}^{i} }} \)
The values of \( {\text{y}}_{\text{l}} \) and \( {\text{y}}_{\text{r}} \) define the output interval of the type-2 fuzzy system, which can be used to verify if training or testing data are contained in the output of the fuzzy system. This measure of covering the data is considered as one of the design criteria in finding an optimal interval type-2 fuzzy system. The other optimization criteria, is that the length of this output interval should be as small as possible.
From the type-reducer, we obtain an interval set \( {\text{y}}\left( {\text{X}} \right) \), to defuzzify it we use the average of \( {\text{y}}_{\text{l}} \) and \( {\text{y}}_{\text{r}} \), so the defuzzified output of an interval singleton type-2 FLS is [10]:
where \( y_{l} \) and \( y_{r} \) are the left most and right most points of the Interval type-1 set: \( y_{l} = \sum\limits_{i = 1}^{M} {y_{l}^{i} \xi_{l}^{i} } = \underline{{\xi_{l}^{T} }} \underline{{\theta_{l} }} \) and \( y_{r} = \mathop \sum \limits_{i = 1}^{M} y_{r}^{i} \xi_{r}^{i} = \underline{{\xi_{r}^{T} }} \underline{{\theta_{r} }} \)
where \( \underline{{\xi^{T} }} = \left( {1/2} \right)[\underline{{\xi_{r}^{T} }} \underline{{\xi_{l}^{T} }} ] \) and \( \underline{\theta } = [\underline{{\theta_{r} }} \quad \underline{{\theta_{l} }} ] \)
5 \( H^{\infty } \) Adaptive Interval Type-2 Fuzzy Control Scheme
Consider an incommensurate fractional order SISO nonlinear dynamic system of the form [22, 37, 40]
if \( q_{1} = q_{2} = \ldots = q_{n} = q \) the above system is called a commensurate order system, then equivalent form of the above system is described as:
where \( X = \left[ {x_{1} ,x_{2} , \ldots ,x_{n} } \right]^{T} = \left[ {x,x^{(q)} ,x^{(2q)} , \ldots ,x^{{(\left( {n - 1} \right)q)}} } \right]^{T} \) is the state vector, \( f\left( {X,t} \right) and g\left( {X,t} \right) \) are unknown but bounded nonlinear functions which express system dynamics, \( d(t) \) is the external bounded disturbance and \( u(t) \) is the control input. The control objective is to force the system output y to follow a given bounded reference signal \( y_{d} \), under the constraint that all signals involved must be bounded. For simplicity, in this paper adaptive IT2FLC for a commensurate order system is proposed only, since the stability condition for the incommensurate order system can be converted to that for the commensurate order system [21, 24, 40].
To begin with, the reference signal vector y d and the tracking error vector e will be defined as
Let \( \underline{k} = \left[ {k_{1} ,k_{2} , \ldots ,k_{n} } \right]^{T} \in R^{n} \) to be chosen such that the stable condition\( | arg(eig(A))| > q\pi /2 \) is met, where \( 0 < q < 1 \) and \( eig(A) \) represents the eigenvalues of the matrix A given in (23).
If the functions \( f\left( {X,t} \right) and g\left( {X,t} \right) \) are known and the system is free of external disturbance d, then the control law of the certainty equivalent controller is obtained as [38, 61].
Substituting (19) into (18), we have:
which is the main objective of control, \( \mathop {\lim }\limits_{t \to \infty } e\left( t \right) = 0. \)
However, \( f\left( {X,t} \right)\,and\,g\left( {X,t} \right) \) are unknown and external disturbance \( d\left( t \right) \ne 0 \), the ideal control effort (18) cannot implemented. We replace \( f\left( {X,t} \right)\,and\,g\left( {X,t} \right) \) by the interval type-2 fuzzy logic system \( f\left( {\left. X \right|\underline{\theta }_{f} } \right)\,and\,g\left( {\left. X \right|\underline{\theta }_{g} } \right) \) in a specified form as (16, 17), i.e.,
where \( \underline{\theta }_{f} = \left[ {\begin{array}{*{20}c} {\underline{\theta }_{fr} } & {\underline{\theta }_{fl} } \\ \end{array} } \right] \) and \( \underline{\theta }_{g} = [\begin{array}{*{20}c} {\underline{\theta }_{gr} } & {\underline{\theta }_{gl} } \\ \end{array} ] \).
Here the fuzzy basis function \( \xi \left( X \right) = \left( {\frac{1}{2}} \right)\left[ {\underline{\xi }_{r} \quad \underline{\xi }_{l} } \right] = \xi_{f} \left( X \right) = \xi_{g} \left( X \right) \) depends on the type-2 fuzzy membership functions and is supposed to be fixed, while \( \underline{\theta }_{f} \,and\,\underline{\theta }_{g} \) are adjusted by adaptive laws based on a Lyapunov stability criterion.
Therefore, the resulting control effort can be obtained as [24, 39],
so
where the robust compensator \( u_{a} \) is employed to attenuate the external disturbance and the fuzzy approximation errors.
By substituting (20) into (17), we have
then
Equation (22) can be rewritten in state space representation as:
The optimal parameter estimations \( \underline{\theta }_{f}^{*} \,{\text{and}}\,\underline{\theta }_{g}^{*} \) are defined:
where \( \Omega _{f},\,\Omega _{g} \,and\,\Omega _{{\underline{x} }} \) are constraint sets of suitable bounds on \( \underline{\theta }_{f} ,\underline{\theta }_{g} \,{\text{and}}\,x \) respectively and they are defined as \( \Omega _{f} = \left\{ {\left. {\underline{\theta }_{f} } \right|\left| {\underline{\theta }_{f} } \right| \le M_{f} } \right\} \), \( \Omega _{g} = \left\{ {\left. {\underline{\theta }_{g} } \right|\left| {\underline{\theta }_{g} } \right| \le M_{g} } \right\} \) et \( \Omega _{x} = \left\{ {\left. x \right|\left| x \right| \le M_{x} } \right\} \) where \( M_{f} \), \( M_{g} \) et \( M_{x} \) are positive constants.
By using (24)–(25), an error dynamic Eq. (23) can be expressed as:
Also, the minimum approximation error is defined as:
If \( \underline{{\tilde{\theta }}}_{f} = \underline{\theta }_{f} - \underline{\theta }_{f}^{*} \) and \( \underline{{\tilde{\theta }}}_{g} = \underline{\theta }_{g} - \underline{\theta }_{g}^{*} \), (27) can be rewritten as:
Following the preceding consideration, the following theorem can be obtained [35].
6 Stability Analysis
Theorem 1
Consider the commensurate fractional order SISO nonlinear dynamic system (17) with control input (20), if the robust compensator \( u_{a} \) and the type-2 fuzzy-based adaptive laws are chosen as
where \( \underline{\theta }_{f}^{(q)} = \left[ {\begin{array}{*{20}c} {\underline{\theta }_{fr}^{(q)} } & {\underline{\theta }_{fl}^{(q)} } \\ \end{array} } \right] \), \( \underline{\theta }_{g}^{(q)} = \left[ {\begin{array}{*{20}c} {\underline{\theta }_{gr}^{(q)} } & {\underline{\theta }_{gl}^{(q)} } \\ \end{array} } \right] \), \( \underline{\xi }_{f}^{T} = \left( {\frac{1}{2}} \right)\left[ {\begin{array}{*{20}c} {\underline{\xi }_{fr}^{T} } & {\underline{\xi }_{fl}^{T} } \\ \end{array} } \right] \) and \( \underline{\xi }_{g}^{T} = \left( {\frac{1}{2}} \right)\left[ {\begin{array}{*{20}c} {\underline{\xi }_{gr}^{T} } & {\underline{\xi }_{gl}^{T} } \\ \end{array} } \right] \)
where \( r > 0, r_{i} > 0, i = 1\sim 4 \) , and \( P = P^{T} > 0 \) is the solution of the following Riccati-like equation :
where \( Q = Q^{T} > 0 \) is a prescribed weighting matrix. Therefore, the \( H^{\infty } \) tracking performance can be achieved for a prescribed attenuation level ρ which satisfies \( 2\rho^{2} \ge r \) and all the variables of the closed-loop system are bounded.
In order to analyze the closed-loop stability, the Lyapunov function candidate is chosen as
Taking the derivative of (36) with respect to time, we get
obtained after a simple manipulation
From (29) the robust compensator \( u_{a} \), and the fuzzy-based adaptive laws are given (30)–(33), \( V^{\left( q \right)} \left( t \right) \) in (37) can be rewritten as:
Integrating (38) from t = 0 to t = T, we have
Since \( V\left( T \right) \ge 0 \), (39) can be rewritten as follows:
Therefore, the \( H^{\infty } \) tracking performance can be achieved. The proof is completed.
7 Simulation Results
The chaotic behaviors in a fractional order modified Duffing system studied numerically by phase portraits are given by [16, 22]. In this section, we will apply our adaptive fuzzy \( H^{\infty } \) controller to synchronize two different fractional order chaotic Duffing systems.
Consider the following two fractional order chaotic Duffing systems [23]:
-
Drive system:
$$ \left\{ {\begin{array}{*{20}l} {D^{q} y_{1} = y_{2} } \hfill \\ {D^{q} y_{2} = y_{1} - 0.25y_{2} - y_{1}^{3} + 0.3{ \cos }(t)} \hfill \\ \end{array} } \right. $$(41) -
Response system:
$$ \left\{ {\begin{array}{*{20}l} {D^{q} x_{1} = x_{2} } \hfill \\ {D^{q} x_{2} = x_{1} - 0.3x_{2} - x_{1}^{3} + 0.35\cos \left( t \right) + u\left( t \right) + d(t)} \hfill \\ \end{array} } \right. $$(42)where the external disturbance \( d(t) = 0.1sin(t). \) The main objective is to control the trajectories of the response system to track the reference trajectories obtained from the drive system. The initial conditions of the drive and response systems are chosen as:
$$ \left[ {\begin{array}{*{20}c} {x_{1} (0)} \\ {x_{2} (0)} \\ \end{array} } \right] = \left[ {\begin{array}{*{20}c} 0 \\ 0 \\ \end{array} } \right]\,and\,\left[ {\begin{array}{*{20}c} {y_{1} (0)} \\ {y_{2} (0)} \\ \end{array} } \right] = \left[ {\begin{array}{*{20}c} {0.2} \\ { - 0.2} \\ \end{array} } \right] , (\text{respectively}). $$
The simulations results for fractional order \( q = 0.98 \) are illustrated as follows:
The Fig. 4 represents the 3D phase portrait of the drive and response systems without control input. It is obvious that the synchronization performance is bad without a control effort supplied to the response system.

3D phase portrait of the drive and response systems without control input (Before the control input)
The different values of \( 0 < q < 1 \) are considered in order to show the robustness of the proposed adaptive fuzzy \( H^{\infty } \) control with our law.
According to the two state output ranges, the membership functions of x i , for \( f\left( {\left. X \right|\underline{\theta }_{f} } \right) \) and \( g\left( {\left. X \right|\underline{\theta }_{g} } \right) \) are selected as follows:
\( \upmu_{{{\text{F}}_{\text{i}}^{\text{l}} }} ({\text{x}}_{\text{i}} ) = \exp \left[ { - 0.5\left( {\frac{{{\text{x}}_{\text{i}} - \overline{\text{x}} }}{0.8}} \right)^{2} } \right] \) \( i = 1, 2 \) and \( l = 1, \ldots ,7 \) where \( \bar{x} \) is selected from the interval \( \left[ { - 1, 2} \right]. \) (Figure 5)

Interval Type-2 Fuzzy sets Gaussian with uncertain standard deviation \( \sigma \)
From the adaptive laws (30)–(33) and the robust compensator (29), the control law of the response system can be obtained as:
According to theorem 1, the controlled error system can be stabilized, i.e., the master system (41) can synchronize the slave system (42) with the control law (20).
The Figs. 6, 7, 8, 9, 10 represent the different simulation results of the drive and response systems with control input (43) for the fractional order q = 0.98.

3D phase portrait, synchronization performance, of the drive and response systems

State trajectories: \( x_{1} y_{1} \)

State trajectories: \( x_{2} y_{2} \)

Control effort: \( u(t) \)

Errors signals: \( e_{1} \& e_{2} \)
It is clearly seen from Fig. 10 that the tracking errors e 1 (t) and e 2 (t) converge both to zero in less than 5 s. Synchronization is perfectly achieved as shown by the state trajectories in Figs. 7 and 8.
The control signal can be observed in the Fig. 9. It indicates that the obtained results are comparable with the solution presented in [23], but fluctuations of the control function are much smaller.
In order to have a quantitative comparison between both methods, a white Gaussian noise is applied to the measured signal with various signals to Noise and Integral of Absolute Error (IAE) is selected as the criterion.
The results in Table 1 clearly indicate that the performance of our proposed type-2 fuzzy controller surpasses the type-1fuzzy method [22]. As can be seen in high SNRs both of the methods have similar performance, however in low SNRs type-1 controller [22] has large IAEs while our proposed controller has still low IAEs. Despite the presence of additive noises in measured signals, the obtained simulation results illustrate the robustness of the proposed control strategy and the utility of introducing type-2 fuzzy modelization approach.
8 Conclusion
In this paper a novel adaptive interval type-2 fuzzy using \( H^{\infty } \) control is proposed to deal with chaos synchronization between two different uncertain fractional order chaotic systems. The use of interval type-2 helps to minimize the added computational burden and hence renders the overall system to be more practically applicable.
Based on the Lyapunov synthesis approach, free parameters of the adaptive fuzzy controller can be tuned on line by the output feedback control law and adaptive laws. The simulation example, chaos synchronization of two fractional order Duffing systems, is given to demonstrate the effectiveness of the proposed methodology. The significance of the proposed control scheme in the simulation for different values of q is manifest. Simulation results show that a fast synchronization of drive and response can be achieved and as q is reduced the chaos is seen reduced, i.e., the synchronization error is reduced, accordingly.
Future research efforts will concern observer-based nonlinear adaptive control of uncertain or unknown fractional order systems. The problem of online identification and parameters estimation for such systems is also a good challenge. Another topic of interest is the design of new robust adaptive control laws for the class of fractional nonlinear systems based on various control configurations such as: (Internal model control) IMC, (Model reference Adaptive Systems) MRAS and the Strictly Positive realness property.
References
Aguila-Camacho, N., Duarte-Mermoud, M. A., & Delgado-Aguilera, E. (2016). Adaptive synchronization of fractional Lorenz systems using a re duce d number of control signals and parameters. Chaos, Solitons and Fractals, 87, 1–11.
Arena, P., Caponetto, R., Fortuna, L., & Porto, D. (1997). Chaos in a fractional order Duffing system. In: Proceedings ECCTD (pp. 1259–1262).
Azar, A. T. (2010). Adaptive neuro-fuzzy systems. In: A. T. Azar (ed.), Fuzzy Systems. IN-TECH, Vienna, Austria. ISBN 978-953-7619-92-3.
Azar, A. T. (2012). Overview of type-2 fuzzy logic systems. International Journal of Fuzzy System Applications (IJFSA), 2(4), 1–28.
Azar, A. T., Vaidyanathan, S. (2015). Chaos modeling and control systems design. Studies in computational intelligence (Vol. 581). Germany: Springer. ISBN 978-3-319-13131-3.
Azar, A. T., Vaidyanathan, S. (2016). Advances in chaos theory and intelligent control. Studies in fuzziness and soft computing (Vol. 337). Germany: Springer. ISBN 978-3-319-30338-3.
Boulkroune, A., Bouzeriba, A., Bouden, T., & Azar, A. T. (2016). Fuzzy adaptive synchronization of uncertain fractional-order chaotic systems. Advances in chaos theory and intelligent control. Studies in fuzziness and soft computing (Vol. 337). Germany: Springer.
Boulkroune, A., Hamel, S., & Azar, A. T. (2016). Fuzzy control-based function synchronization of unknown chaotic systems with dead-zone input. Advances in chaos theory and intelligent control. Studies in fuzziness and soft computing (Vol. 337). Germany: Springer.
Castillo, O., & Melin, P. (2008). Type-2 fuzzy logic: Theory and applications. Heidelberg: Springer.
Castillo, O., & Melin, P. (2012). Recent advances in interval type-2 fuzzy systems. Springer Briefs in Computational Intelligence. doi:10.1007/978-3-642-28956-9_2.
Castro, J. L. (1995). Fuzzy logical controllers are universal approximators. IEEE Transactions on Systems, Man and Cybernetics, 25, 629–635.
Cazarez-Castro, N. R., Aguilar, L. T., & Castillo, O. (2012). Designing type-1 and type-2 fuzzy logic controllers via fuzzy Lyapunov synthesis for non-smooth mechanical systems. Engineering Applications of Artificial Intelligence, 25(5), 971–979.
Chen, Y., Wei, Y., Liang, S., & Wang, Y. (2016). Indirect model reference adaptive control for a class of fractional order systems. Communications in Nonlinear Science and Numerical Simulation.
Diethlem, K. (2003). Efficient solution of multi-term fractional differential equations using P(EC)mE methods. Computing, 71, 305–319.
Efe, M. O. (2008). Fractional fuzzy adaptive sliding-mode control of a 2-DOF direct-drive robot arm. IEEE Transactions on Systems, Man, and Cybernetics—Part B: Cybernetics, 38(6), 1561–1570.
Ge, Z.-M., & Ou, C.-Y. (2008). Chaos synchronization of fractional order modified Duffing systems with parameters excited by a chaotic signal. Chaos, Solitons and Fractals, 35(4), 705–717.
Ghaemi, M., & Akbarzadeh T. M. R. (2011). Optimal design of adaptive interval type-2 fuzzy sliding mode control using genetic algorithm. In Proceedings of the 2nd International Conference on Control, Instrumentation, and Automation, Shiraz, Iran (pp. 626–631).
Hartley, T. T., Lorenzo, C. F., & Qammer, H. K. (1995). Chaos on a fractional Chua’s system. IEEE Transactions on Circuits and Systems Theory and Applications, 42(8), 485–490.
Hilfer, R. (2001). Applications of fractional calculus in physics. New Jersey: World Scientific.
Karnik, N. N., & Mendel, J. M. (1998). Type-2 fuzzy logic systems: Type-reduction. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics, San Diego, CA (pp. 2046–2051).
Karnik, N. N., Mendel, J. M., & Liang, Q. (1999). Type-2 fuzzy logic systems. IEEE Transactions on Fuzzy Systems, 7, 643–658.
Khettab, K., Bensafia, Y., & Ladaci, S. (2014). Robust adaptive fuzzy control for a class of uncertain nonlinear fractional systems. In Proceedings of the Second International Conference on Electrical Engineering and Control Applications ICEECA’2014, Constantine, Algeria.
Khettab, K., Bensafia, Y., & Ladaci, S. (2015). Fuzzy adaptive control enhancement for non-affine systems with unknown control gain sign. In Proceedings of the International Conference on Sciences and Techniques of Automatic Control and Computer Engineering, STA’2015, Monastir, Tunisia (pp. 616–621).
Khettab, K., Ladaci, S., & Bensafia, Y. (2016). Fuzzy adaptive control of fractional order chaotic systems with unknown control gain sign using a fractional order Nussbaum gain. IEEE/CAA Journal of Automatica Sinica.
Kilbas, A. A., Srivastava, H. M., & Trujillo, J. J. (2006). Theory and applications of fractional differential equations. Amsterdam: Elsevier.
Ladaci, S., & Charef, A. (2002). Commande adaptative à modèle de référence d’ordre fractionnaire d’un bras de robot (in French) Communication Sciences & Technologie, ENSET Oran, Algeria (Vol. 1, pp. 50–52).
Ladaci, S., & Charef, A. (2006). On fractional adaptive control. Nonlinear Dynamics, 43(4), 365–378.
Ladaci, S., & Charef, A. (2006). An adaptive fractional PIλDμ controller. In Proceedings of the Sixth Int. Symposium on Tools and Methods of Competitive Engineering, TMCE 2006, Ljubljana, Slovenia (1533–1540).
Ladaci, S., Loiseau, J. J., & Charef, A. (2008). Fractional order adaptive high-gain controllers for a class of linear systems. Communications in Nonlinear Science and Numerical Simulation, 13(4), 707–714.
Ladaci, S., Charef, A., & Loiseau, J. J. (2009). Robust fractional adaptive control based on the strictly positive realness condition. International Journal of Applied Mathematics and Computer Science, 19(1), 69–76.
Ladaci, S., Loiseau, J. J., & Charef, A. (2010). Adaptive internal model control with fractional order parameter. International Journal of Adaptive Control and Signal Processing, 24, 944–960.
Ladaci, S., & Charef, A. (2012). Fractional order adaptive control systems: A survey. In E.W. Mitchell & S.R. Murray (Eds.), Classification and application of fractals (pp. 261–275). Nova Science Publishers Inc.
Ladaci, S., & Khettab, K. (2012). Fractional order multiple model adaptive control. International Journal of Automation and Systems Engineering, 6(2), 110–122.
Ladaci, S., & Bensafia, Y. (2016). Indirect fractional order pole assignment based adaptive control. Engineering Science and Technology, an International Journal, 19, 518–530.
Lee, C.-H., & Chang, Y.-C. (1996). H ∞ Tracking design of uncertain nonlinear SISO systems: Adaptive fuzzy approach. IEEE Transactions on Systems, 4(1).
Lin, T.-C., Chen, M.-C., Roopaei, M., & Sahraei, B. R. (2010). Adaptive type-2 fuzzy sliding mode control for chaos synchronization of uncertain chaotic systems. In Proceedings of the IEEE International Conference on Fuzzy Systems (FUZZ), Barcelona (pp. 1–8).
Lin, T. C., Kuo, M. J., & Hsu, C. H. (2010). Robust adaptive tracking control of multivariable nonlinear systems based on interval type-2 fuzzy approach. International Journal of Innovative Computing, Information and Control, 6(1), 941–961.
Lin, T.-C., & Kuo, C.-H. (2011). H ∞ synchronization of uncertain fractional order chaotic systems: Adaptive fuzzy approach. ISA Transactions, 50, 548–556.
Lin, T. C., Kuo, C.-H., Lee, T.-Y., & Balas, V. E. (2012). Adaptive fuzzy H ∞ tracking design of SISO uncertainnonlinear fractional order time-delay systems. Nonlinear Dynamics, 69, 1639–1650.
Lin, T. C., Lee, T.-Y., Balas, & V. E. (2011). Synchronization of uncertain fractional order chaotic systems via adaptive interval type-2 fuzzy sliding mode control. In Proceedings of the IEEE International Conference on Fuzzy Systems, Taipei, Taiwan.
Lin, T.-C., Lee, T.-Y., & Balas, V. E. (2011). Adaptive fuzzy sliding mode control for synchronization of uncertain fractional order chaotic systems. Chaos, Solitons and Fractals, 44, 791–801.
Lin, T. C., Liu, H. L., & Kuo, M. J. (2009). Direct adaptive interval type-2 fuzzy control of multivariable nonlinear systems. Engineering Applications of Artificial Intelligence, 22(3), 420–430.
Lin, T. C., Wang, C.-H., & Liu, H.-L. (2004). Observer-based indirect adaptive fuzzy-neural tracking control for nonlinear SISO systems using VSS and H ∞ approaches. Fuzzy Sets and Systems, 143(2), 211–232.
Mendel, J. M. (2007). Advances in type-2 fuzzy sets and systems. Information Sciences, 177(1), 84–110.
Mendel, J. M., & John, R. I. B. (2002). Type-2 fuzzy sets made simple. IEEE Transactions on Fuzzy Systems, 10(2), 117–127.
N’Doye, I. (2011). Généralisation du lemme de Gronwall-Bellman pour la stabilisation des systèmes fractionnaires. Ph.D. Thesis, Ecole doctorale IAEM Lorraine, Morocco.
Neçaibia, A., & Ladaci, S. (2014). Self-tuning fractional order PIλDμ controller based on extremum seeking approach. International Journal of Automation and Control, Inderscience, 8(2), 99–121.
Neçaibia, A., Ladaci, S., Charef, A., & Loiseau, J. J. Fractional order extremum seeking control. In Proceedings of the 22nd Mediterranean Conference on Control and Automation (pp. 459–462) (MED’14, Palermo, Italy on June 16–19).
Odibat, Z. M. (2010). Adaptive feedback control and synchronization of non-identical chaotic fractional order systems. Nonlinear Dynamics, 60, 479–487.
Ouannas, A., Azar, A. T., & Vaidyanathan, S. (2016). A robust method for new fractional hybrid chaos synchronization. Mathematical Methods in the Applied Sciences. doi:10.1002/mma.4099.
Petráš, I. (2006). A note on the fractional-order cellular neural networks. In Proceedings of the IEEE International World Congress on Computational Intelligence, International Joint Conference on Neural Networks (pp. 16–21).
Petráš, I. (2008). A note on the fractional-order Chua’s system. Chaos, Solitons and Fractals, 38(1), 140–147.
Podlubny, I. (1999). Fractional differential equations. San Diego: Academic Press.
Qilian, L., & Mendel, J. M. (2000). Interval type-2 fuzzy logic systems: Theory and design. IEEE Transactions on Fuzzy Systems, 8(5), 535–550.
Rabah, K., Ladaci, S., & Lashab, M. (2016). Stabilization of a Genesio-Tesi chaotic system using a fractional order PIλDµ regulator. International Journal of Sciences and Techniques of Automatic Control and Computer Engineering, 10(1), 2085–2090.
Srivastava, H. M., & Saxena, R. K. (2001). Operators of fractional integration and their applications. Applied Mathematics and Computation, 118, 1–52.
Tian, X., Fei, S., & Chai, L. (2014). Adaptive control of a class of fractional-order nonlinear complex systems with dead-zone nonlinear inputs. In Proceedings of the 33rd Chinese Control Conference, Nanjing, China (pp. 1899–1904).
Vaidyanathan, S., & Azar, A. T. (2016). Takagi-Sugeno fuzzy logic controller for Liu-Chen four-scroll chaotic system. International Journal of Intelligent Engineering Informatics, 4(2), 135–150.
Vinagre, B. M., Petras, I., Podlubny, I., & Chen, Y.-Q. (2002). Using fractional order adjustment rules and fractional order reference models in model-reference adaptive control. Nonlinear Dynamics, 29, 269–279.
Wang, L. X. (1992). Fuzzy systems are universal approximators. In Proceedings of the IEEE International Conference on Fuzzy Systems, San Diego (pp. 1163–1170).
Wang, C.-H., Liu, H.-L., & Lin, T.-C. (2002). Direct adaptive fuzzy-neural control with state observer and supervisory controller for unknown nonlinear dynamical systems. IEEE Transactions on Fuzzy Systems, 10(1), 39–49.
Wang, C.-H., Cheng, C.-S., & Lee, T.-T. (2004). Dynamical optimal training for interval type-2 fuzzy neural network (T2FNN). IEEE Transactions on Systems, Man, and Cybernetics. Part B, Cybernetics, 34(3), 1462–1477.
Wei, Y., Sun, Z., Hu, Y., & Wang, Y. (2015). On fractional order composite model reference adaptive control. International Journal of Systems Science. doi:10.1080/00207721.2014.998749.
Wei, Y., Tse, P. W., Yao, Z., & Wang, Y. (2016). Adaptive backstepping output feedback control for a class of nonlinear fractional order systems. Nonlinear Dynamics. doi:10.1007/s11071-016-2945-4.
Yuan, J., Shi, B., & Yu, Z. (2014). Adaptive sliding control for a class of fractional commensurate order chaotic systems. mathematical problems in engineering. Article ID 972914.
Zadeh, L. A. (1975). The concept of a linguistic variable and its application to approximate reasoning. Information Sciences, 8(3), 199–249.
Zhang, R., & Yang, S. (2011). Adaptive synchronization of fractional-order chaotic systems via a single driving variable. Nonlinear Dynamics, 66, 831–837.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing AG
About this chapter
Cite this chapter
Khettab, K., Bensafia, Y., Ladaci, S. (2017). Robust Adaptive Interval Type-2 Fuzzy Synchronization for a Class of Fractional Order Chaotic Systems. In: Azar, A., Vaidyanathan, S., Ouannas, A. (eds) Fractional Order Control and Synchronization of Chaotic Systems. Studies in Computational Intelligence, vol 688. Springer, Cham. https://doi.org/10.1007/978-3-319-50249-6_7
Download citation
DOI: https://doi.org/10.1007/978-3-319-50249-6_7
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-50248-9
Online ISBN: 978-3-319-50249-6
eBook Packages: EngineeringEngineering (R0)