
Abstract
Under the study, 6 bovine femur heads and overall number of 70 dissected cuboid specimens of cancellous bone were intended for micro-CT. Descriptor-based approach was used for 3D images registration from different resolutions using translation and rotation invariant local geometric descriptors based on 3D Laplace filter and nearest neighbours identification using 6-dimensional scalar vectors. Presented approach is simple and effective and can be processed using macros for ImageJ tool. Obtained accuracy of registration with error lower than 1 pixel allows for further analysis of bone mechanical properties, enabling precise determination of orientation for anisotropy and therefore the study of behaviour of the bone under load.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
The problem of registration of 3D volumetric images is well known in medical imaging and usually it is accomplished through sample independent fiduciary markers [1]. Because the amount of fiduciary markers available for registration is generally low, error analysis is the most widely studied rather than efficiency of matching of multiple markers with only partial overlap [2]. As opposed to medical imaging, in the robotics and automation studies there is interest in localization of large amounts of objects that are usually extracted from images and compared with data from databases to determine their orientation and type [3]. The use of local descriptors instead of complete images for matching is applied in many fields including computer vision and image registration [4], as well as robotics and autonomous systems [5]. Therefore, approach that combines the idea of using fiduciary markers, local descriptors and applying global optimization for whole problem might potentially be used to register 3D complex volumetric structures efficiently. Such a descriptor-based approach was originally used for data from multi-view technique Selective Plane Illumination Microscope (SPIM) and can register an arbitrary number of partially overlapping point clouds [6]. Although it was defined for SPIM, due to its efficiency the method meets the requirements for the registration of 3D measurements from MicroComputed Tomography (micro-CT) - high-resolution non-destructive imaging technique based on X-rays [7].

3D reconstructions of cuboid cancellous bone specimens from different sites of bovine femur obtained using micro-CT imaging (mesoscopic level).

Visualization of the input data registration consisting of 3D images from micro-CT measurements of bovine femoral bone using two different resolutions for 3D scans.
2 Problem Statement
3D reconstructions of cuboid cancellous bone specimens from different sites of bovine femur obtained using high-resolution micro-CT imaging are illustrated in Fig. 1. As can be seen there, even within the same macroscopic bone, such volumes of interest are uniquely characterized by a complex network of connections with specific pore sizes and thickness of the trabeculae. Therefore the problem of digital registration of such complex structures, measured in different resolutions and orientations as illustrated in Fig. 2, requires the application of efficient computerized techniques and extraction of local image features. Developed automated methodology that uses such an approach is illustrated in Fig. 3.

Scheme of the automated methodology that uses descriptor-based registration.
3 Materials and Methods
The Difference of Gaussian (DoG) function provides a close approximation to the Laplacian of Gaussian (LoG) and produce the most stable image features compared to a range of other possible solutions, such as the Hessian, gradient or Harris corner function [4]. DoG function can be used to define local descriptor of a bead for the image I approximating 3D Laplace filter \(\nabla ^2 I\) and detecting all beads with sufficient accuracy while effectively suppressing high frequency noise. The local descriptor of a bead is defined by the locations of its 3 nearest neighbours in 3D image space ordered by their distance to the bead. All local minima in a \(3\times {}3\times {}3\) neighbourhood in \(\nabla ^2 I\) represent intensity maxima - sub-pixel location is then estimated by fitting a 3D quadratic function to this neighbourhood. The DoG detector identifies beads even if they are close to each other.
Based on the above assumptions Descriptor-Based Registration (DBR) plugin for open source ImageJ tool [9] was originally developed for 2D or 3D images by Stephan Preibisch [6]. DBR uses translation and rotation invariant local geometric descriptors based on 3D Laplace filter and nearest neighbours identification using 6-dimensional scalar vectors. To efficiently extract the nearest neighbours in image space kd-tree implementation of the WEKA framework is used and DoG function is fixed with a standard deviation of 1.4 pixels and 1.8 pixels respectively. To eliminate false correspondence of extracted nearest neighbours, learning technique Random Sample Consensus (RANSAC) is used on the affine transformation model to estimate parameters of a model by random sampling of observed data [8]. Result of RANSAC is then followed by robust regression. Originally plugin performs all the steps of the registration pipeline: bead segmentation, correspondence analysis of bead-descriptors, outlier removal (RANSAC and global regression), global optimization and fusion.
In order to perform the automated registration of two 3D images from different micro-CT measurements, plugin modification were necessary. Therefore DBR was enriched with the option to adjust the input 3D images by the histogram-based normalization of the volumes. The implemented algorithm selects the cut-off level of the histogram to a minimum following a global maximum. Thereby data from lower-resolution micro-CT measurements can be fitted to data from higher-resolution scans allowing for precise registration.

Part of the femur head before micro-CT measurement (on the left), cross-sections of the measurement in three perpendicular directions (in the center), 3D reconstruction of the measured bone (on the right).
4 Results and Discussion
In the presented work 6 bovine femur heads and overall number of 70 dissected cuboid specimens of cancellous bone were intended for micro-CT. The experimental part of the research was conducted in Laboratory of Nano and Microtomography (AGH University of Science and Technology, Cracow). All micro-CT measurements were performed using the X-ray nanotomograph Nanotom S (General Electric) with supply voltage of 100 kV and current of 160 µA and isotropic voxel (high-resolution 6.5 µm for 10 mm cuboid bone specimens and low-resolution 45.6 µm for femur heads). 3D reconstruction of the structures using Feldkamp algorithm was performed using datosX software (ver. 2.1) dedicated to GE Nanotom S. Pre-processing of the data was performed in the VG Studio Max (ver. 2.1) as illustrated in Fig. 4.

The graphical result of descriptor-based registration of cuboid cancellous bone sample and femur head (overlapping stacks).
Descriptor-based approach was used for 3D volumes registration of bones from different resolutions, namely automated matching of high-resolution cuboid bone specimens (to register) with low resolution femur heads (reference) after resampling to fit the resolution of 4 times resampled low-resolution data. The number of descriptors was set to value of 3, redundancy for descriptor matching to 1, significance required for a descriptor match to 1 and 3D rigid transformation model using maxima only type of detection. The result of such a registration is illustrated in Fig. 5. Figure 6 shows a percentage value of the descriptors match in function of cut-off level for one of the statistically representative volume of cancellous bone - automatically selected cut-off level value was marked using vertical dashed line. Similar curves were obtained for all of the cuboid specimens and in most cases it results in registration with a lower error and higher number of matched descriptors – several percentage points greater value in average.

Percentage value of the descriptors match in function of cut-off level for the histogram for lower-resolution bone measurements (automatically selected cut-off level value was marked using vertical dashed line).
Morphometrical analysis of the high-resolution structures after binarization using automatically determined global threshold was performed using ImageJ enriched with the plug-in BoneJ, where direct three-dimensional methods are implemented [10]. Similar analysis was performed for low-resolution structures after inverse transformation obtained through registration, appropriate cropping and binarization using Auto Local Threshold plugin for ImageJ and modified Niblack’s method [11]. From the definition the threshold value for each pixel is computed with a window of radius r around it based on the local mean m, standard deviation s, multiplier k and offset c as follows: \(T = m + k \cdot s - c\). After trial and error method with morphometrical verification, k was fixed to value of 0.43 and r to 17 pixels with c equals to 0 as in original algorithm. The comparison of stacks after registration and processing is illustrated in Fig. 7.

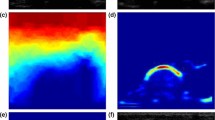
The comparison between high-resolution and low-resolution gray-scale images after registration (on the top) and binarization (on the bottom) with the information about initial histograms (in the center).
Regarding the effectiveness of the method of registration for different specimens, the mismatch problem due to a lack of finding an adequate number of descriptors or error value greater than 1 pixel was eliminated through bigger value of virtual cut for the femur heads measurements (reference). Therefore it is important to keep information about physical cut sites which can be useful in such cases. For all investigated cases it was possible to set a constant threshold parameter for a given femur head allowing for automation. Additionally implemented cut-off level calculation for reference 3D image based on histogram allowed to increase the number of matched descriptors and achieve error lower than 1 pixel for all specimens. Obtained accuracy of registration allows for further analysis of the anisotropy and mechanical properties with experimental validation based on in-situ compression tests and thereby a study of behaviour of the bone under load.
5 Conclusion
Automated processing of micro-CT scans was successfully applied to register 3D images of cancellous bone porous tissue from different resolutions. Descriptor-based registration approach used in the study allows for integration with developed automated methodology for verification of experimental mechanical properties of bone, being valuable tool for in vitro and in vivo studies in the future.
References
Wiles, A., Likholyot, A., Frantz, D., Peters, T.: A statistical model for point-based target registration error with anisotropic fiducial localizer error. IEEE Trans. Med. imaging 27, 378–390 (2008)
Fitzpatrick, J.M., West, J.B.: The distribution of target registration error in rigid-body point-based registration. IEEE Trans. Med. Imaging 20, 917–927 (2001)
Canny, J.: A computational approach to edge detection. IEEE Trans. Pattern Anal. Mach. Intell. 8(6), 679–698 (1986)
Lowe, D.G.: Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 60(2), 91–110 (2004)
Kuipers, B., Byun, Y.T.: A robot exploration and mapping strategy based on a semantic hierarchy of spatial representations. J. Robot. Auton. Syst. 8, 47–63 (1991)
Preibisch, S., Saalfeld, S., Schindelin, J., Tomancak, P.: Software for bead-based registration of selective plane illumination microscopy data. Nat. Meth. 7(6), 418–419 (2010)
Stock, S.R.: MicroComputed Tomography: Methodology and Applications. CRC Press, Boca Raton (2008)
Fischler, M.A., Bolles, R.C.: Random sample consensus. Commun. ACM 24(6), 381–395 (1981)
Abramoff, M.D., Magalhaes, P.J., Ram, S.J.: Image processing with ImageJ. Biophotonics Int. 11(7), 36–42 (2004)
Doube, M., et al.: BoneJ: free and extensible bone image analysis in ImageJ. Bone 47, 1076–1079 (2010)
Niblack, W.: An introduction to Digital Image Processing. Prentice-Hall, Englewood Cliffs (1986)
Acknowledgments
J. Kamiński. acknowledges benefit from Ph.D. scholarship by Marian Smoluchowski Cracow Scientific Consortium – KNOW.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing AG
About this paper
Cite this paper
Kamiński, J., Trzewiczek, B., Wroński, S., Tarasiuk, J. (2017). Automated Processing of Micro-CT Scans Using Descriptor-Based Registration of 3D Images. In: Świątek, J., Tomczak, J. (eds) Advances in Systems Science. ICSS 2016. Advances in Intelligent Systems and Computing, vol 539. Springer, Cham. https://doi.org/10.1007/978-3-319-48944-5_7
Download citation
DOI: https://doi.org/10.1007/978-3-319-48944-5_7
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-48943-8
Online ISBN: 978-3-319-48944-5
eBook Packages: EngineeringEngineering (R0)