
Abstract
Educational robots are regarded as beneficial tools in education due to their capabilities of improving learning motivation. Using cognitive dissonance as a teaching tool has been popular in science education too. A considerable number of researchers have argued that cognitive dissonance has an important role in the student’s attitudes change. This paper presents a design for a cutting-edge experiment where we describe a procedure that induces cognitive dissonance. We propose to use an educational robot that helps the student overcome the cognitive dissonance during science learning. We make the difference between students that base their decisions on thinking (though-minded) and those that mostly base their decisions on feeling (relational). The main mission of the study was to implicitly lead students to evolve a positive implicit attitude supporting redoing difficult scientific exercises to understand one’s errors and to avoid learned helplessness. Based on the assumption that relational students are emotional (easily alienated), we investigate whether they are easy to be persuaded in comparison to though-minded students. Also, we verify whether it is possible to consider an educational robot for such a mission. We compare different persuasive sources (tablet showing a persuasive text, an animated robot and a human) encouraging the student to strive for cognitive closure, to verify which of these sources leads to better implicit attitude supporting defeating one’s self to assimilate difficult scientific exercises. Finally, we explore which of the persuasive sources better fits each of both student’s profiles.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Several researchers are endeavoring to develop interactive educational robots. Nao was one of the educational robots to prove success in math teachingFootnote 1. VGo was used by sick students to avoid missing classFootnote 2. TIRO played the role of an educational media in class [1]. Robota was used for multiple educational purposes [2, 3] as well as Robovie [4]. RoboSapien encourages students to learn English [5]. These efforts seem to be devoted to socially assist children, and replace the student or the teacher in the classroom. However, to the best of our knowledge, no concern was paid to the serious damage that cognitive dissonance encountered by students at schools during science learning and the social robot’s key persuasive role that can be played to overcome it. When the student realizes that his answer is wrong, his preconceptions are defeated and we call such a situation cognitive dissonance. Based on Abramason et al. [6], incrementally the cognitive dissonance may lead to learned helplessnessFootnote 3. In such a case, once the student has to resolve a scientific exercise, he experiences a depression coupled with motivational deficits and starts avoiding science learning (after successive failures). In our current work, we are interested in comparing different persuasive sources’ (a box, a robot, a human) effects that might help different students’ types (profiles:relational vs though minded) overcome the cognitive dissonance by driving them to answer again the difficult exercise rather than skipping it.
2 Counter-Attitudinal Actions
When cognitive dissonance occurs, different counter-attitudinal actions can be chosen by the human and which are: an active attitude change with a new attitude createdFootnote 4, a belief change by minimizing the importance of the cognitive dissonanceFootnote 5 or a perception change by getting a new information to support one’s previous decisionFootnote 6. When the student experiences cognitive dissonance, he will strive to decrease the inconsistency by choosing one of the described counter-attitudinal actions. We want that students get rid of their bad attitudes of skipping the difficult exercise. The new formed attitude should be highly accessed so that it can be stored on a long term basis on the student’s cognitive miserFootnote 7.
3 Students Different Profiles
According to Murray et al. [7], people that have mostly though-minded attitudes are associated with low empathy and high self-concern. They are less likely to show cognitive dissonance. They show less attitude change than people who are relational. That it is why, dealing with cognitive dissonance in classrooms means that we need to deal with two students’ profiles: though-minded students who base their judgment mostly on thinking with a careless response to others and relational students who base their judgment mostly on feeling (by taking care of social norms). In our case, students have to avoid skipping the current exercise if they answered it in a wrong way. They should evolve implicitly a new attitude encouraging the strive to redo difficult exercises. An idea here is to afford a non deliberative persuasive source that implicitly drives the student to evolve the new positive attitude. As though-minded students are difficult to be persuaded, we consider different persuasive sources to verify whether an educational robot could be adapted for both student’s profiles and we compare it to the other persuasive sources.
4 Hypothesis
We expect that (H1): “The more a participant scores high on the dimension of relational (vs though-minded), the more that participant will be persuaded since we assume that he/she is more cooperative than a though minded participant.” We have three different persuasive sources (“a tablet in a box”, “the robot” and “a human”) as well as a baseline condition (no persuasive source). So, we need to investigate whether (H2): “We have a main effect of the persuader’s agency type. That is, we expect that when a participant interacts with a tablet in a box, he will be persuaded less than when that participant interacts with a robot, in which situation the participant will be persuaded less than when he will interact with a human and of course having a persuasive source is better than nothing.” Finally, we expect (H3):“Most importantly, an interaction between the manipulation of the persuader’s agency and the persuaded profile.”

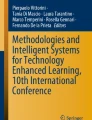
(a) A close-up picture of ROBOMO; (b) ROBOMO apparatus; (c) The general setup of the experiment.
5 ROBOMO Architecture
ROBOMO tracks the user’s face using a Web Camera whilst the human is around (Fig. 1(a)). It integrates a micro PC and provides a speech through the speaker. The generated sound have different tones that are adapted with the robot’s gestures (excited, sad, angry and happy tones). The robot uses five servo-motors (AX-12+) to exhibit different gestures (Fig. 1(a)).
6 Apparatus
In the first zone of the graphical interface, we have the current practice exercise’s text and a button called “Current Exercise” to click on when the student decides to do the current exercise. There are text zones for the analytical and numerical answers and a button to click on once the student needs to submit the answer. In the score’s text area, the student can verify whether his answer was correct or not. If the answer was incorrect, the student has to click on “Current Exercise” or “Next Exercise” (in the second zone) buttons to decide whether to redo the current difficult exercise or to jump to the next one. Once the student clicks on “Next Exercise” button, the next exercise will be displayed in the first zone with a clear text and a new fuzzy text will be appearing in the next exercise’s text area zone to avoid the student’s be biased by fallacies and biasFootnote 8. In fact, one of the basic parameters that may activate the cognitive dissonance is to make the consequences of the student’s choices foreseeable. So, making the next exercise’s text fuzzy increases the possibility of risk aversionFootnote 9. An EyeTribe helps tracking the student’s eye gaze (Fig. 1(c)).
7 Methodology
66 Tunisian students participated in this experiment (33 though-minded and 33 relational) ([17–19] years) from Farhat Hached College students. They answered a pre-experiment questionnaire before by 3 days to determine the student’s profile (whether the student is though-minded or relationalFootnote 10 Adapted from Looking at Type: The Fundamentals by Charles R. Martin (CAPT 1997).). Participants were debriefed which may help us to evaluate their planned attitudeFootnote 11. Participants were told that they would resolve some exercises to help evaluate a new robot platform so that we avoid any forewarningFootnote 12. Once a student enters to the room, he was asked to do the calibration (eye tribe) and then starts answering the exercises. We indicated for the student that he can redo the same current exercise multiple times as long as he wishes. We inform the student that he can choose to jump to the next exercise. When the student feels that he wants to leave the room or when he finishes the exercises’ collection, we thank him and he has to answer a post-experiment survey (indicated in Sect. 9). We divided our participants (within subjects design experiment) in a way that we can guarantee that we have a counterbalance of the data, thereby reducing the effect of the sequence of trials on the results.
8 Experiment
ROBOMO generates the speech based persuasive strategy with a medium speech’s speed along with the robot’s convenient gestures (body and head gestures) and the right tone (Fig. 1). The persuasive speech follows the technique “that’s not all”. That’s not all technique starts with a non deliberative phrase. However, before the human can process the whole phrase different sides (what will be gained or lost), the persuader sweetens the first non deliberative phrase with another phrase. This technique is based on incrementally increasing the number of non deliberative positively framed phrases with a medium speech’s speed. An example of a persuasive message could be: “Einstein tried multiple times to succeed on his exams at a certain point of his age. However, his work was rejected many times and judged to be wrong. He continued until he created an excellent amazing science work. Perseverance is one of the ingredients for success. That’s not all. As long as you try to understand the difficult exercises you spend more time and according to Harvard table of calories lose, you can burn in 30 min up to 50 calories just by concentrating.” There are four conditions the student takes part in which are: the baseline condition (No persuasive message is afforded), condition 1 (the box containing the tablet affords the persuasive strategy), condition 2 (the robot affords a persuasive strategy) and condition 3 (the human affords a persuasive strategy). Each two days, the student comes to the classroom to redo another set of exercises with a new set of persuasive messages while we change the persuasive source.
9 After Experiment Survey and the Considered Dependent Variables
After the experiment finished, the student has to answer questionnaires such as the explicit attitudeFootnote 13 [8], the implicit attitude (implicit association test): IAT [8]Footnote 14, the cognitive dissonance (cogn.diss) [9]Footnote 15 and the perceived pleasure’s levelFootnote 16. We considered other dependent variables:
-
The quotient: \(\frac{Number\_of\_times\_the\_user\_redoes\_the\_incorrect\_exercise}{number\_of\_times\_the\_user\_makes\_an\_error}\). It gives an idea about when has the student a tendency to redo incorrect exercises to strive for science learning rather than jumping from an exercise to another.
-
Looks: number of times the user “dwells” with eye gaze between the 2 exercises.
10 Results: Hypothesis 1 Investigation
Results are significant for all the constructs with P-value values in the range of [0.031–0.001] (Table 1). Based on the mean and standard deviation results, we can see that relational students have higher constructs’ values in comparison to the though-minded students except for the pleasure construct. Though-minded students felt higher pleasure’s level (M = 3.22, SD = 0.169) in comparison to relational students (M = 3.22, SD = 0.169).
10.1 Results: Hypothesis 2 Investigation
The persuasive message source agency’s level had a main effect in terms of all the constructs with a P-value <0.001 (last column). Table 2, shows that there were no significant differences between baseline and box conditions except for looks construct: (F = 21.47, p-value = 0.04 < 0.05) (second column). Also, Table 2 shows that using a robot as a persuasive source increases the student’s pleasure: ((F = 63.4, p-value = 0.006) R), IAT: ((F = 103, p-value < 0.001)R), cog.diss: ((F = 180.1, p-value = 0.004)R), quotient: ((F = 48.7, p-value < 0.001)R) and looks: ((F = 155, p < 0.001)R) (third column) constructs’ values. Finally, Table 2 shows that the human’s presence as a persuasive source increases IAT: ((F = 165.5, p-value = 0.005)H), cog.diss: ((F = 40.4, p-value < 0.001)H), quotient: ((F = 7.9, p-value < 0.001)H) and looks: ((F = 14.1, p < 0.001)H) constructs’ values. Table 3, shows that there were significant differences between the robot and box conditions with higher results in the robot’s condition for all the constructs (second column). Also, Table 3 shows that using a human as a persuasive source in comparison to using a robot increases cog.diss: ((F = 88.5, p-value = 0.04 < 0.05)H) and looks: ((F = 71.08, p-value < 0.001)H). There were statistical differences in terms of pleasure with higher results in the robot’s condition rather than in the human’s condition ((F = 83.58, p-value < 0.001)R) while no statistical differences were found when we compare IAT mean values of the robot and human’ conditions ((F = 2.29, p-value = 0.13)) (third column). Finally, Table 3 shows that using a human as a persuasive message source in comparison to using a box increases IAT: ((F = 37.54, p-value = 0.003 < 0.01)H), cog.diss: ((F = 17.9, p-value < 0.001)H), quotient: ((F = 5.17, p-value = 0.049 < 0.05)H) and looks: ((F = 54, p-value = 0.008)H). However, again there were no main statistical differences of pleasure mean values in the human condition when we compare it to the pleasure mean values in the box condition (F = 16.34, p-value = 0.06 > 0.05) (fourth column).
10.2 Results: Hypothesis 3 Investigation
There was a significant interaction of the persuasive source and the student’s profile. Table 4, shows that though-minded students were more sensitive to the persuasive source with a positive increase in contrast values when we change the persuasive source from the box to the robot (pleasure: (F = 5.75, p-value = 0.01 < 0.05) T((+) 3.79); IAT: (F = 6.1, p-value = 0.03 < 0.05) T((+)0.38); cog.diss: (F = 16.68, p-value < 0.001) T((+) 4.64); quotient: (F = 3.34, p-value = 0.025 < 0.05) T((+) 1.12)) (first column). Though-minded students are more sensitive to the persuasive source with a negative increase in contrast values when we change the persuasive source from the robot to the human (pleasure: (F=4.43, p-value= 0.03 < 0.05) T((−) 0.81); looks: (F = 6.87, p-value = 0.01 < 0.05)T((−)5)), IAT: ((6.9, p-value= 0.03<0.05) T((−)0.22)) and quotient: (2.9, 0.047) T((−)2.03 (last column). Furthermore, when the persuasive source changed from the box to the robot, relational students seem to be more sensitive than though-minded students with a positive contrast values (looks: (F = 4.6, p-value = 0.03 < 0.05) R((+)6.48)). Finally, relational students seem to be happier when we change the persuasive source from the box to the human with (pleasure: (F = 4.46, p-value = 0.03 < 0.05) R((+)1.55) (second column). Based on Table 5, when comparing the baseline and box conditions, relational students are more sensitive than though-minded students when we change the source from baseline (no source) to the box with IAT: (F = 5.17, p-value = 0.02 < 0.05) R((+)0.41); quotient: (F = 11.14, p-value = 0.003 < 0.01) R((+)0.22) and looks: ((F = 4.23, p-value = 0.04 < 0.05) R((+)3.3))) (second column). When comparing the baseline and robot conditions, though-minded students are more sensitive than relational students when we change the persuasive source from baseline (no source) to the robot in terms of pleasure: (F = 3.5, p-value = 0.04 < 0.05) T((+)1.05); IAT: (F = 5.12, p-value = 0.02 < 0.05) T((+)0.68) and quotient: (F = 24.6, p-value < 0.001) T((+)0.48) (third column). Also, when comparing the baseline and robot conditions, relational students are more sensitive with changing the source from baseline (no source) to the robot with cog.diss: (F = 180.1, p-value < 0.001) R((+)15.73) and looks: (F = 17.3, p-value < 0.001) R((+)9.79)) (a general positive tendency) (third column). Finally, when comparing the baseline and human conditions, relational students are more sensitive with changing the source from baseline (no source) to the human with (pleasure: (F = 4.1, p-value = 0.03 < 0.05) R((+)2.15); IAT: (F = 11.11, p-value = 0.001 < 0.01) R((+) 0.78); cog.diss: (F = 40.4, p-value < 0.001) R((+)7.15); quotient: (F = 24.47, p-value < 0.001) R((+)0.27) and looks: (F = 15.74, p-value < 0.001) R((+)4.42) (a general positive tendency) (fourth column).
11 Relational Students Are Easy to Be Persuaded Than Though-Minded Students
Based on Table 1, relational students have higher constructs’ values in comparison to though-minded students except for the pleasure construct. Consequently, the more a participant scores high on the dimension of relational (vs though-minded), the more that participant will be easily persuaded (H1).
12 Animated Agents as the Best Persuasive Message Sources
Based on Table 2 using an adaptive persuasive source that shows some animacy (a robot or a human) leads globally to better results. When we used a tablet, the number of times the student looks between the two exercises increases ((21.47, 0.04)Bx). Based on the students’ debriefing answers, when we use a box, the student looks to the tablet that it is inside the box very frequently. This is to read a small part of the text. After that, the student looks to the current exercise to verify whether its text contains some of the phrases displayed in the tablet. Finally, the student decides whether to choose the current or the next exercise. Based on Table 3, we remark that by comparing the box condition vs (robot or the human conditions), the box condition has always significant smaller mean constructs’ values (except for pleasure). However, when we compare the human and the robot conditions, the human as a persuasive source leads to higher perceived cognitive dissonance, quotient and looks constructs’ values. This means that the student must evolve stronger implicit attitude (IAT) and quotient values when we use the human as a persuasive source. But, it is not the case while we have no significant differences between the human and the robot conditions in terms of IAT and quotient constructs’ values (H2).
13 Interaction’s Effect (Student’s Profile X Persuasive Source)
Based on Table 4, when we use a human as a persuasive source, though-minded students are more sensitive in a negative way than relational students while the number of looks, the pleasure’s level and the quotient values decreased (last column). This means that using a robot for though-minded students leads to higher pleasure and a more consideration of the difficult exercise as well as higher quotient results (based on the last column of Table 4). As for relational students, using a human as a persuasive source leads to higher pleasure scores and quotient values in comparison to the case when we use the box (Table 4 column 3). Relational students seem to appreciate the human’s presence when we compare it to the baseline condition (Table 5 column 4). They are more cooperative than though-minded students when we change the persuasive source from the robot to the human (pleasure, looks and quotient) with a less decreasing contrast values. Consequently, relational students seem to be more tolerant than though-minded students for the usage of the human as a persuasive source. Using a human or a robot as a persuasive source for relational students leads to a steady level of IAT with a contrast value equal to 0.01. This means that relational students evolve the same positive attitudes whether we used a human or a robot as a persuasive source. However, though-minded students have a bigger contrast value that led to the significant IAT: (6.9, p-value = 0.03 < 0.05) T((−)0.22). This shows that though-minded students evolve less positive attitude towards redoing the difficult scientific exercise in comparison to relational students when the human is the persuasive source rather than the robot.
14 Conclusion
We conducted an experiment that helps us to investigate the most persuasive source (a tablet, a robot, a human) for the different students’ profiles (though-minded and relational). We remarked that relational students are easy to be persuaded than though-minded students. Using a human or a robot as persuasive sources can help the student overcomes the cognitive dissonance and leads to better results in comparison to the baseline or the box conditions. Finally, though-minded students are more persuaded when we use the robot rather than the human as a persuasive source. Relational students seem to be more tolerant to the usage of a human as a persuasive source than though-minded students. Also, we concluded that as for relational students, a positive attitude could evolve implicitly and it is of the same magnitude whether we consider the human or the robot as a persuasive source. In our future work, we try to investigate the differences in effects of the persuasive message’s timing during science learning to overcome the cognitive dissonance (whether the message should be delivered after, during or before being stricken by the cognitive dissonance).
Notes
- 1.
- 2.
- 3.
The student will avoid science learning.
- 4.
The student thinks that he has to change his attitude of avoiding difficult exercises.
- 5.
After all, science learning is not that important. Many other tasks could be done.
- 6.
The student thinks that the answer afforded by the book is incorrect.
- 7.
By measuring the implicit and explicit attitudes, we can verify whether it was established for a long term basis.
- 8.
Typical errors in human social judgment that are caused by systemic use of cognitive strategies.
- 9.
In decision-making, the weight given to possible losses is greater than possible gains.
- 10.
- 11.
This is to measure the student’s explicit attitude. We just ask respondents to think about and report their attitudes.
- 12.
Forewarning often produces resistance to persuasion.
- 13.
By debriefing the students. In fact, psychologists usually think of explicit measures as those that require respondents’ conscious attention to the construct being measured by using Likert scale and semantic differential scale (it is the planned behavior in our case).
- 14.
This is important to verify whether the student is convinced about the fact that he needs to strive for science learning by redoing difficult exercises rather than adopting a negative implicit attitude that supports learned helplessness. Implicit measures are those that do not require this conscious attention (spontaneous behavior). Some methods could help to measure the implicit attitude such as evaluative priming and the implicit association test.
- 15.
This is to measure the cognitive dissonance level according to the student’s subjective evaluation.
- 16.
References
Han, J., Kim, D.: r-learning services for elementary school students with a teaching assistant robot. In: Conference on Human Robot Interaction, pp. 255–256 (2009)
Robins, B., Dautenhahn, K.: Tactile interactions with a humanoid robot: novel play scenario implementations with children with autism. J. Soc. Robot. 6, 397–415 (2014)
Billard, A.: Robota: clever toy and educational tool. Robot. Auton. Syst. 42, 259–269 (2003)
Kanda, T., Sato, R., Ishiguro, H.: A two-month field trial in an elementary school for long-term human-robot interaction. IEEE Trans. Robot. 23, 962–971 (2007)
Zhen, Y., Chi, S., Chih, C., Gwo-Dong, C.: A robot as a teaching assistant in an English class. In: Conference on Advanced Learning Technologies, pp. 87–91 (2006)
Abramason, L.Y., Seligman, M.E., Teasdale, J.D.: Learned helplessness in humans: critique and reformulation. J. Abnorm. Psychol. 87, 49–74 (1978)
Murray, A., James, M., Scott, L.: Psychopathic personality traits and cognitive dissonance: individual differences in attitude change. J. Res. Pers. 46, 525–536 (2012)
Pantos, A.J.: Measuring implicit and explicit attitudes toward foreign-accented speech. J. Lang. Soc. Psychol. 32, 3–20 (2013)
Levin, D., Harriott, C., Natalie, A.P., Julie, A.A.: Cognitive dissonance as a measure of reactions to human-robot interaction. J. Hum. Robot Interact. 2, 3–17 (2013)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 Springer International Publishing AG
About this paper
Cite this paper
Youssef, K., Ham, J., Okada, M. (2016). Investigating the Effects of the Persuasive Source’s Social Agency Level and the Student’s Profile to Overcome the Cognitive Dissonance. In: Agah, A., Cabibihan, JJ., Howard, A., Salichs, M., He, H. (eds) Social Robotics. ICSR 2016. Lecture Notes in Computer Science(), vol 9979. Springer, Cham. https://doi.org/10.1007/978-3-319-47437-3_12
Download citation
DOI: https://doi.org/10.1007/978-3-319-47437-3_12
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-47436-6
Online ISBN: 978-3-319-47437-3
eBook Packages: Computer ScienceComputer Science (R0)