
Abstract
This paper revisits the problem of the workspace determination and representation of spherical parallel robotic manipulators (SPRMs). To this end, the kinematics of these mechanisms will be analyzed by using a specific parameterizing as well as a novel 3D representation of the orientation operational space. This new representation uses a spherical coordinate system in which the radial coordinate corresponds to last rotation of the Euler angles sequence. In order to determine the workspace of the 3-RRR SPRM, the orientation space attainable by each kinematic limb, considered independent from the rest of the mechanism and having the mobile platform (MPF) as end-effector (EE), is constructed as a 3D solid volume by using the proposed parameterizing and representation of rotations. Thereafter, the orientation operational space is determined by applying Boolean intersection operations on the previously obtained vertex volumes.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Workspace determination and characterization constitutes a fundamental issue in the mechanism design process. Due to the kinematic complexity of parallel manipulators especially, this is a still open problem. Moreover, the orientation workspace is not well defined in the general case due to the non uniqueness of the orientation parameters for a given configuration. The orientation of a solid in the 3D operational space is univocally given by a rotation matrix which is an element of the Special Orthogonal group SO(3). As far as we know, there is not a simple metric defined in this group which enables measuring the volume of a 3D domain in the orientation space, necessary to characterize manipulators’ orientation capacity.
Several methods have been used for the workspace determination of spherical parallel robotic manipulators (SPRMs). In [1], authors have proposed a new analytical method to determine the workspace boundaries of symmetrical SPRMs. The method is based on the use of the tilt-and-torsion angles to visualize the orientation workspace. In [5], authors have employed a geometric approach based on differential geometry to obtain a very simple volume of the orientation workspace of SPRMs 3-UPS-1S-type. In [2], a technique based on the Euler-Rodrigues parameters of the rotation of a rigid body is developed to determine the workspace of SPRM 3-RRR-type. Authors have used a solid modeler to approximate the volume reached by each spherical serial limb by slicing this volume to several slices. In [4], the operational workspace of an innovative concept of a spherical robot, for needle placement techniques with 5-DOF for medical applications has been computed. In [3], for a hybrid spherical robot, the positioning and orienting errors due to flexibility are evaluated in order to improve quality in positioning and tracking of trajectories.
In this paper we address, through a specific parameterizing of the orientation operational space and a novel 3D graphical representation of this space, the determination of the workspace of SPRMs. The paper is organized as follows. In Sect. 2, the parameterizing of the SPRM 3-RRR is given. We establish the geometric relations between the orientation of the mobile platform and the joint coordinates of each serial spherical limb separated from the whole of the SPRM and having the MPF as end-effector (EE). In Sect. 3, we introduce a new graphical representation of the orientation space. This representation is used for the determination of the 3D workspace of the SPRM using CAD environment facilities.
2 Kinematic Formulation
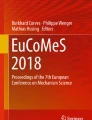
In order to illustrate our approach, we focus on the 3-RRR-type SPRM (the underlined letter stands for the active revolute joint). This manipulator is formed by a fixed base (FB) and a moving platform (MPF) which are connected through three identical legs. Each leg combines three revolute joints connecting the fixed base (FB), a proximal and a distal links and the mobile platform (MPF). The 3-RRR-type SPRMs are characterized by the fact that all their revolute joint axes intersect at one common point, which is called the geometric center of the SPRM or the center of spherical motion. This point is referred to as O in Fig. 1, which displays a CAD model of a general SPRM 3-RRR-type and a serial spherical limb isolated from the rest of the mechanism. This figure includes the notations used in this paper.

CAD model of SPRM 3-RRR-type and parameterized model of one limb
2.1 Parameterizing of the 3-RRR-Type SPRM
For determining and representing a new 3D orientation workspace for the SPRM under study all sets of parameters of the 3-RRR-type SPRM are introduced. In this aim, we set up two coordinates systems as follows. In accordance with Fig. 1, the first coordinate system is O-X 0 Y 0 Z 0, which is the absolute coordinate system in the operational space, attached to the FB.
The point O represents the geometric center of the SPRM 3-RRR-type. The second coordinate system is E-X E Y E Z E , attached to the MPF. In addition, several sets of parameters are defined as following: intrinsic parameters of the FB (Set -1), intrinsic parameters of the MPF (Set -2), joints and design parameters of the limb k (k = a, b, c) (Set -3), motorized joints parameters (Set -4), and operational parameters of the SPRM 3-RRR-type (Set -5). Set -1 is defined using two intrinsic parameters (ξ, υ k ) that depend on the geometric design of the SPRM. These parameters allow travelling from the fixed base coordinate system to the one attached to the motorized revolute joints on the fixed base. υ k designates the rotation angle around Z 0-axis of O-X 0 Y 0 Z 0. For the design under study we have the following values for this parameter: for limb a: υ a = 0, for limb b: υ b = 120 (°), for limb c: υ c = 240 (°). ξ stands for the angle between the plane X 0 OY 0 and the axis of the first revolute joint of the spherical limb. This parameter allows reaching the rotation axis of first motorized revolute joint of each limb. Set -2 is defined, similarly to Set -1, for the FB, using two intrinsic parameters (α, γ), see Fig. 2. These parameters correspond to those allowing travelling from the mobile platform coordinate system E-X E Y E Z E to those attached to the three vertices (A, B, C) of the MPF. α indicates the semi-angle of the imaginary conical surface formed by the rotation axis of the passive revolute joints fixed on the MPF, see Fig. 2. γ designates the rotation angle around X E of E-X E Y E Z E , see Fig. 2. Given that the joint centers on the MPF under study form an equilateral triangle, so we obtain γ a = π/6, γ b = −π/6 and γ c = 0.

Parameters associated to the MPF
Set -3 contains the parameters used for one serial spherical limb of the SPRM RRR-type. The geometry of each limb is defined by the design angular parameters β 1k , β 2k , where angle β 1k (k = a, b, c) defines the “length” of the proximal link. Similarly, the length of the distal link is defined by the angle β 2k . So, the configuration in the space of a serial spherical limb k, (with k = a, b, c), in accordance with Fig. 1, is given by the set of parameters θ 1k , θ 2k and θ 3k .
Set -4 regroups the motorized joints parameters. For the SPRM 3-RRR-type, the joint parameters correspond to the rotation angles of the motorized revolute joints mounted on the fixed base denoted by θ 1a , θ 1b and θ 1c .
The operational parameters of the SPRM 3-RRR-type (Set -5) are defined by the three rotation angles of the MPF associated, in our case, to the Euler angles. These angles define the rotation transformation from O-X 0 Y 0 Z 0 to E-X E Y E Z E . They correspond to the angles of three successive rotations about the axes of a moving coordinate system, which is initially aligned with the reference coordinate system O-X 0 Y 0 Z 0, and modifies its orientation after each intermediate rotation. The sequence of the three Euler angles ϕ z , ϕ y and ϕ x representing the set of operational parameters is defined in the following way. Firstly, the MPF rotates around Z 0-axis of the fixed base by an angle ϕ z , then another rotation around the MPF Y 1-axis, of the new rotating coordinate system produced from the first rotation (Z 0, ϕ z ), by an angle ϕ y , and finally a rotation around the MPF X E -axis, of the new rotating coordinate system produced from the previous rotations, by an angle ϕ x .
2.2 Geometric Modeling of a Limb
The rotational matrix describing the orientation of the mobile platform can be written as follows:
where R Z0(ϕ z ) stands for the rotation matrix corresponding to a rotation about OZ 0-axis through an angle ϕ z , R Y1(ϕ y ) stands for the rotation matrix corresponding to a rotation about OY 1-axis through an angle ϕ y , and R XE (ϕ x ) stands for the rotation matrix corresponding to a rotation about OX E -axis through an angle ϕ x . From Eq. (1) one can obtain the global rotation matrix of the mobile platform with respect to the fixed base:
where \( c_{{\phi_{i} }} = \cos (\phi_{i} ) \) and \( s_{{\phi_{i} }} = \sin (\phi_{i} ) \), with i = (x, y, z)
The geometric model describing the transformation from O-X 0 Y 0 Z 0 to E-X E Y E Z E can be formulated using a matrix form as following (we will use the limb a): beginning with the coordinate system O-X 0 Y 0 Z 0 in Fig. 3a, in order to attain the configuration in Fig. 3b we make a rotation by an angle ξ, about the Y 0-axis (Fig. 3a). This transformation is expressed by the rotation matrix R y01(ξ) in Eq. (3). After that, another rotation by an angle θ 1a , about x 1a -axis (motorized revolute joint axis of the limb a) is performed, in such a way that the z 1a -axis will be perpendicular to the plane containing the proximal link of the limb, see Fig. 3c). This transformation is expressed by the rotation matrix R x02(θ 1a ) in Eq. (3). Afterward, a rotation by an angle β 1a , about the z’ 1a (Fig. 3d) is performed. This transformation is expressed by the rotation matrix R z03(β 1a ) in Eq. (3). Then, another rotation, by an angle θ 2a , is realized about x 2a -axis (Fig. 3e) which stands for the axis of the second revolute joint of the limb. This rotation is performed in such a way the z 2a -axis will be perpendicular to the plane containing the distal link of the limb. This transformation is expressed by the rotation matrix R x04(θ 2a ) in Eq. (3). Next, a rotation about the z’ 2a -axis (Fig. 3f) is applied by an angle β 2a , which represents the length of the distal link. This transformation is expressed by the rotation matrix R z05(β 2a ) in Eq. (3). Afterward, a rotation by an angle θ 3a , about the axis of the third revolute joint of the limb x 3a -axis = x a-PF-axis is performed, as depicted in Fig. 3g. This transformation is expressed by the rotation matrix R x06(θ 3a ) in Eq. (3). To reach the configuration of the MPF coordinate system, we perform two successive orientations, by the following way:

Successive transformations for geometric model formulation of the limb a
-
(i)
a rotation by an angle α about z a-PF-axis, see Fig. 3h,
-
(ii)
a rotation by an angle γ a about x’ a-PF-axis, see Fig. 3i.
The last transformations are expressed by an inverse rotation matrix R’ Ek in Eq. (3).
Depending upon Fig. 3, we can write the global transformation allowing travelling from the operational coordinate system O-X 0 Y 0 Z 0 to E-X E Y E Z E using a matrix form:
This formulation is applied to all the spherical limbs of the 3-RRR-type SPRM, with k = a, b, c. Where, R’ Ek represents the transformation matrix enabling travelling from E-X E Y E Z E to the three frames on the platform vertices a, b and c. We obtain the following matrices:
3 Workspace Determination of 3-RRR-Type SPRM
The key idea of our approach stems from the consideration of a new representation of the orientation operational space. This representation allows a direct and natural interpretation of orientation capacities for all types of manipulators and especially for spherical ones.
3.1 New Representation of the Orientation Operational Space
An orientation defined by the three Euler angles ϕ z , ϕ y and ϕ x can be represented in spherical coordinates by the following set of parameters: ϕ z , ϕ y and ρ, with:
ρ is a new operational parameter which can replace the spin angle ϕ x in the previous operational space representation introduced in Sect. 2.1. This new parameter represents a radial distance calculated from the geometric center point O of the SPRM. In other words, the spin rotation angle along X E -axis is mutated by the radius of a sphere centered in point O, this radius increases by applying homothetic transformation. ρ varies from ρ min to ρ min + h for a variation of the spin angle from 0 to 2π. This parameter can be expressed as follows:
ρ min stands for the radius of initial (departure) sphere which corresponds to (ϕ x = 0), while ρ max corresponds to the maximal (arrival) sphere (ϕ x = 2π). Finally h stand for the thickness (ρ max − ρ min). These values can be selected arbitrarily.
3.2 Application to Workspace Determination
The formulation presented above Eqs. (1)–(5), has been implemented in MATLAB® software. For the 3D orientation workspace determination, this formulation is used to generate the point cloud corresponding to the 3D volume attainable by each serial spherical limb having the MPF as EE. The point cloud is obtained by fixing the joint angle θ 2k at 0 then at π while varying angles θ 1k and θ 3k from 0 to 2π with a given discretization step. The generated points are on the boundary surface of the orientation space of the limb k (k = a, b, c). After obtaining the point cloud relative to each limb we export it to a CAD package (CATIA® in our case). This latter phase is dedicated to construct the volume entities for workspace determination, as we will see afterward in this section. The following is the general technique adopted to obtain the novel representation of the orientation operational space of the SPRM: (i) importing of the scattered point clouds data in a CAD environment, (ii) generate the boundary surfaces of the vertex volumes form point cloud, (iii) construction the vertex volumes delimited by the generated surfaces attainable by the end-effector characteristic point (EECP) attached to each spherical limb, (iv) applying two successive Boolean intersection operations for obtaining the workspace of the SPRM. Figures 4, 5 illustrate the previously mentioned steps.

Point clouds attainable by the EECP attached to each serial spherical limb

Procedure for obtaining the new representation of orientation operational workspace for the 3-RRR SPRM, β 1i = β 2i = 60°, α = 60°, η = 120°, ξ = 22.75°
4 Conclusions
In this paper, an approach for determining the orientation workspace has been proposed. It can be applied for all type of manipulator and especially for SPRM. This approach is based on a specific parameterizing of orientation parameters in the operational space and a novel representation of orientation in spherical coordinates. We aim through this approach to analyze the orientation workspace by establishing a new geometric interpretation of the motion of the EECP attached to each separated serial spherical limb. This representation is also useful in solving the forward geometric problem (FGP) as will be presented in a future work.
References
Bonev, I.A., Gosselin, C.: Analytical determination of the workspace of symmetrical spherical parallel mechanisms. IEEE Trans. Robot. 22(5), 1011–1017 (2006)
Bulca, F., et al.: On the workspace determination of spherical serial and platform mechanism. Mech. Mach. Theory 34(3), 497–512 (1999)
Tanev, T.K., et al.: Elastostatic model of a new hybrid minimally-invasive-surgery robot. In: The 14th IFToMM World Congress, Taipei, Taiwan, October 25–30 (2015)
Vaida, C., et al.: A CT-scan compatible robotic device for needle placement in medical applications. Adv. Eng. Forum 8–9, 574–583 (2013)
Yang, G., Chen, I.M.: Equivolumetric partition of solid spheres with applications to orientation workspace analysis of robot manipulators. IEEE Trans. Robot. 22(5), 869–879 (2006)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing Switzerland
About this paper
Cite this paper
Arrouk, K., Bouzgarrou, BC., Gogu, G. (2017). On the Workspace Representation and Determination of Spherical Parallel Robotic Manipulators. In: Wenger, P., Flores, P. (eds) New Trends in Mechanism and Machine Science. Mechanisms and Machine Science, vol 43. Springer, Cham. https://doi.org/10.1007/978-3-319-44156-6_14
Download citation
DOI: https://doi.org/10.1007/978-3-319-44156-6_14
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-44155-9
Online ISBN: 978-3-319-44156-6
eBook Packages: EngineeringEngineering (R0)