
Abstract
In resent years, space satellites have been widely used in the world. They cause the space debris, which has become a problem because they may collide each other in space. In our study, we have developed a Spherical UltraSonic Motor (SUSM) with 3 DOF in space use to drive the satellite thruster and resolve the space debris problem. When the satellites enter the atmosphere at the end of the life, SUSM controls thrusters for the right direction in falling down to the earth to burn in the air. We have made experiments to evaluate torque, durability and lifetime. It shows that the torque and lifetime meets target value. But durability does not meet the target lifetime. To resolve it, we have applied a new stator lining materials and shifted frequency with 0.4 kHz from resonant frequency. Finally we have succeeded in durability-required specifications.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Recently many countries launched a lot of space satellites. So, space debris has become a problem in the world. It is because the space debris causes collision of satellites. In our research, we apply our 3DOF Spherical UltraSonic Motor (3DOF SUSM) to resolve this problem. For the use of our motor in outer space, it is necessary to meet space use specifications such as required output torque and durability in the high vacuum. Especially heat is serious problem. By reducing generated heat of the motor by lining material and resonance frequency shift, we are able to rotate the motor under high vacuum environment more than 120 min. The specifications of the motor in this research (high vacuum 10−3 Pa, room temperature) is as follows; maximum output torque 25 mN m, continuous working time 120 min, cycles of working more than 300 times.
The temperature changes from −120 to 200 °C in space. It is very important specification for the motor. However, it requires not only improvement of materials but also control method and heat design of it. So, the movement in high or low temperature is the discussion on next stage. In this research, the authors focus on durability of vacuum use in only room temperature. It is also important for special use in space, for example, in the temperature controlled satellite.
2 Spherical Ultrasonic Motor
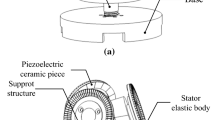
The 3DOF SUSM used in this study consists of one spherical rotor and three ring-shaped stators. Figures 1 and 2 show an overview of the 3DOF SUSM and the characteristics. The stator consists of a metallic elastic body and piezoelectric elements. When an AC voltage is applied to the piezoelectric vibrator, a standing wave is generated on the elastic body. By applying two AC voltages with some phase difference to the positive and negative sections of the piezoelectric elements, a traveling wave is generated due to combination of the two standing waves. The amplitude of the traveling wave is controlled by the phase difference of these two standing wave; phase difference 0 is standing wave and phase difference 90° is traveling wave with maximum velocity. The velocity of the traveling wave can be controlled by phase difference precisely with every 1°.

Spherical ultrasonic motor

Characteristics of SUSM
The stators and the rotor are in pressure contact with each other. Three stators are aligned with 120° each other, but with 7° under horizontal plane. It is because that the sum of velocity vectors generated by each stator can make arbitrary vector, that is, the motor can rotate about specified vector in three dimensional space with specified speed [1–5]. It has three degree of freedom of rotation. However, exactly speaking, the rotational velocity of the rotor is less than the vector sum due to friction loss.
We have made experiments of SUSM in the vacuum chamber (applied voltage 180 Vpp, applied resonant frequency, air pressure 10−3 Pa) to measure output torque and rotational speed. An experimental apparatus is shown in Fig. 3. We have applied phase difference 0°, 60°, and −60° to stators to rotate about Y-axis and measured its rotational velocity and output torque. The results are shown in Fig. 4. It shows that lifetime is only 4 min in the vacuum environment and maximum speed is degenerated 17 % comparing to the case in air. But the output torque increased 20 %. It is because that some materials on the surface of the rotor and stator are vapored out and the frictional force increased.

Experiment equipment for measuring rotational speed

Durability experiment in the atmosphere versus in vacuum
3 Lining Material and Resonant Frequency
We have improved the motor materials for use of space. Firstly, we have applied the new lining material on the surface of rotor as follows; Original (Normal), #1A (Molybdenum disulfide, Type A), FS-1140 (Fluorine resin, Type B), #815-4 (Fluorine resin, Type C), S-6100 (Fluoridation graphite, Type D). These materials have good characteristics suited for space use such as low wear, high frictional force and high durability under high temperature. The experimental results are shown in Fig. 5. The lifetime is extended. But it is much less than required specifications (120 min). It is because that generated heat changes the resonant frequency and stator cannot vibrate nor drive the rotor. All motors generated higher output torque than required specifications.

Durability of motor with lining materials
In order to make lifetime longer, we have applied near resonant frequency (0.4 kHz higher shift) to the stators so that it may make the vibration amplitude smaller to resolve frictional heat. The results are shown in Fig. 6. We have found that it meets the specifications of lifetime.

Durability experiment. Type C (S-6100), Type D (Fs-1140), Normal (no lining material)
Generally speaking, the heat source of this motor is contact surface and inside of piezoelectric ceramics. The contact surface of stator and rotor with high pressure produces heat by friction. The improved lining materials reduce the frictional heat. On the other hand, heat generated in the ceramics by inner friction loss with small grains is reduced by the shift of the resonant frequency to suppress the amplitude of the vibration.
4 Conclusions
We have developed a new spherical ultrasonic motor for space use. Applying new lining materials and resonant frequency shift to the stators, it meets the space specifications, that is, maximum output torque 25 mN m, continuous working time 120 min, cycles of working more than 300 times. We have succeeded in showing its potentials for space use.
References
Takesue, N., et al.: Position control methods of spherical ultrasonic motor. In: Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems, p. 3061 (2010)
Sashida, T., Kenjo, T.: An Introduction to Ultrasonic Motors. Oxford Press, Oxford (1993)
Purwanto, E., Toyama, S.: Control method of a spherical ultrasonic motor. In: IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM 2003), pp. 1321–1326 (2003)
Mashimo, T., Awaga, K., Toyama, S.: Development of a spherical ultrasonic motor with an attitude sensing system using optical fibers. In: IEEE International Conference on Robotics and Automation (ICRA2007), p. 4466 (2007)
Mashimo, T., Toyama, S., Ishida, H.: Development of an MRI compatible surgical assist manipulator using spherical ultrasonic motor (1st report)-prototype of the spherical ultrasonic motor. J. Japan Soc. Precis. Eng. 73(2), 275 2007 (in Japanese)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing Switzerland
About this paper
Cite this paper
Nishizawa, U., Toyama, S., Oohashi, T. (2017). Spherical Ultrasonic Motor for Space. In: Beran, J., Bílek, M., Žabka, P. (eds) Advances in Mechanism Design II. Mechanisms and Machine Science, vol 44. Springer, Cham. https://doi.org/10.1007/978-3-319-44087-3_11
Download citation
DOI: https://doi.org/10.1007/978-3-319-44087-3_11
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-44086-6
Online ISBN: 978-3-319-44087-3
eBook Packages: EngineeringEngineering (R0)