
Abstract
In this paper, we investigate the following discrete-time map:
We introduce a novel method to determine the stability of the given two-dimensional map by using a one-dimensional map. A cobweb-like diagram is also introduced in order to analyze the stability of the system. We show that the stability of a fixed point in cobweb diagram implies the stability in phase diagram for the given system.
In addition, an application of the system to a non-hyperbolic fixed point is also given.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
In this paper, we investigate the dynamics of a nonlinear planar map. One of the main goals of this work is to analyze the stability of the following planar map by using a cobweb-like diagram.
A cobweb, or Verhulst diagram is a visual method used in the dynamical systems to investigate the qualitative behavior of one-dimensional maps. Using a cobweb diagram, it is possible to analyze the long term status of an initial condition under repeated application of a map. Use of cobweb diagram can be found in Devaney (1989); Elaydi (2000).
Cobweb diagram is usually used for one-dimensional discrete dynamical systems; however, in this paper, we propose a novel method with cobweb diagram to investigate the dynamics of the two-dimensional discrete system (1), assuming \(\phi ^{-1}\) exists.
For convenience, we will take \(\phi =f^{-1}\) and \(\psi =g\). Hence, we have the following system:
In this section, we give a lemma for a root finding algorithm which allows us to determine the stability of the given system by using cobweb-like diagram. In Sect. 2, we give a theorem for the stability condition of system (\(\star \)) and apply the cobweb-like diagram in order to determine the stability.
The general two dimensional autonomous discrete system is given by
whose isocline equations are
It is easy to see that the isocline equations do not uniquely determine the dynamics of systems. A simple example for that is the following system which has the same isoclines as system (2) does but they have different dynamics simply because they have different eigenvalues of the Jacobian matrices:
In contrary, for system (\(\star \)), since \(x_{n+1}\) and \(y_{n+1}\) depend only on \(y_n\) and \(x_n\), respectively, there is a unique representation of the isoclines and they determine the dynamics uniquely. We investigate the dynamics of the system, just by focusing on the isoclines which are \(y=f(x)\) and \(y=g(x)\)
System (\(\star \)) might find many applications in engineering, game theory, and particularly competition models in economics and biology.
1.1 A Root Finding Algorithm
In this section, we give a lemma for finding the intersection points of two curves. However, we will use the lemma not for finding the intersection points but to construct the cobweb diagram and investigate the stability of the system in a rectangular region.
Lemma 1
Let \(f:A\rightarrow B=f(A)\) and \(g:C\rightarrow D=g(C)\) be continuous functions, where \(A\subset C\) and \(D\subset B\). Assume that \(f(\bar{x})=g(\bar{x})=\bar{y}\) for some \(\bar{x}\) and one of the following four conditions is satisfied:
Then, for any \(x_0\in C\), \((f^{-1}\circ g)^n(x_0)\rightarrow \bar{x}\) as \(n\rightarrow \infty \), provided \(f^{-1}\) exists.
Proof
For each of the conditions, we can consider the theorem separately. We will prove the theorem only for Condition (1). By using similar approach, one can show the statement for the other conditions.
Assume that Condition (1) is satisfied. We will show that, for any \(x_0\in C\),
Since \(f:A\rightarrow B=f(A)\) is invertible, it must be strictly monotone on A (either strictly increasing or strictly decreasing). However, it cannot be decreasing, because \(f(x)<f(\bar{x})=\bar{y}\) when \(x< \bar{x}\). Hence, f is strictly increasing on A. Therefore, \(f^{-1}:B\rightarrow A\) is also strictly increasing.
Now take any \(x_0>\bar{x}\). By assumption, we have \(\bar{y}<g(x_0)<f(x_0)\). Since \(f^{-1}\) is strictly increasing, we obtain \(f^{-1}(\bar{y})<f^{-1}(g(x_0))<f^{-1}(f(x_0))\) or \(\bar{x}<(f^{-1}\circ g)(x_0)<x_0.\)
Let us call \(x_1=(f^{-1}\circ g)(x_0)\) and apply the same procedure to \(x_1\) to obtain \(x_2=(f^{-1}\circ g)^2(x_0)\). Applying the same procedure over and over, we obtain
By Monotone Convergence Theorem, the limit of the sequence \((f^{-1}\circ g)^n(x_0)\) exists. Let \(F=f^{-1}\circ g\), \(\lim F^n(x_0)=L\), and consider the following difference equation:
The only fixed point of the equation is \(\bar{x}\), since the only solution of the equation \(F(x^*)=x^*\) is \(x^*=\bar{x}.\)
Then, by continuity of F, we have the following:
Hence the limit must be \(\bar{x}\) which is the only fixed point of Eq. (5).
The case when \(x_0<\bar{x}\) can be done similarly. Therefore, \(\lim F^n(x_0)\rightarrow \bar{x}\) for any \(x_0\in C\) if Condition (1) holds.
Remark 1
Note that, in Lemma 1, the functions f and g are not necessarily differentiable.
Remark 2
For the special case when \(A=B=C=D=\mathbb {R}\), we give a simplified version of the lemma in Appendix whose proof is very similar.
Figure 1 shows the case for Condition 1 of Lemma 1 and how the algorithm works to find the intersection point of the two curves \(y=f(x)\) and \(y=g(x)\).

Root Finding Algorithm
2 Stability of System (\(\star \))
In this section, we analyze the stability of the system (\(\star \)). We first investigate the dynamics of the system in a rectangular region and give the stability condition.
2.1 Dynamics of System (\(\star \)) in a Rectangular Region
Theorem 1
Consider the discrete dynamical system
where \(f:A\rightarrow B=f(A)\) and \(g:C\rightarrow D=g(C)\) are continuous functions, with \(A\subset C\) and \(D\subset B\). Let \((\bar{x},\bar{y})\) be a fixed point of system (\(\star \)) and one of the following conditions be satisfied:
Then \((\bar{x},\bar{y})\) is asymptotically stable fixed point on the rectangular region \(C\times ~B\).
Proof
Let one of the four conditions given in the theorem be satisfied. Then, by Theorem 1, \((f^{-1}\circ g)^n(x_0)\rightarrow \bar{x}\) as \(n\rightarrow \infty \), where \(x_0\in C\).
Now, let \(F=f^{-1}\circ g\) and start with the point \((x_0,y_0)\in C\times B\). Then, for the x-components of the orbit, we have
Therefore, \(x_2=F(x_0)\), \(x_4=F^{2}(x_0)\), and in general \(x_{2n}=F^{n}(x_0)\); whereas \(x_3=F(x_1)\), \(x_5=F^{2}(x_1)\), and in general \(x_{2n+1}=F^{n}(x_1)\). Hence, by Theorem 1, \(x_{2n}=F^{n}(x_0)\rightarrow \bar{x}\) as \(n\rightarrow \infty \). Since \(x_1\in A\subset C\), by using the same theorem, we obtain \(x_{2n+1}=F^{n}(x_1)\rightarrow \bar{x}\) as \(n\rightarrow \infty \). Therefore, \(x_n\rightarrow \bar{x}\) as \(n\rightarrow \infty \).
Since g is continuous, we have \(\lim y_{n+1}=\lim g(x_n)=g(\lim x_n)=g(\bar{x})=\bar{y}\), which proves that \((\bar{x},\bar{y})\) is an attracting fixed point.
We have
By Theorem 3, since \(\bar{x}\in C\) and \(\bar{y}\in B\) are attracting points, they are stable.
Remark 3
For system (\(\star \)), Theorem 1 works also for the non-hyperbolic case. Since the trace of the Jacobian matrix is always zero, the case when determinant of the Jacobian matrix at the fixed point equals 1 is the borderline where the Neimark-Sacker bifurcation might occur. For this critical case, for which \(\lambda _{1,2}=\pm i\), we can analyze the stability by applying Theorem 1. Geometrically, this is the case when the slopes of the tangent lines to the isoclines at the fixed point, say \(m_1\) and \(m_2\), have the property \(m_1=-m_2\). Note that, since \(\lambda ^4=1\), this is not necessarily a Neimark-Sacker bifurcation (Kuznetsov 1995).
Remark 4
Note that, in Theorem 1, the functions f and g are not necessarily differentiable.
Remark 5
For the special case when \(A=B=C=D=\mathbb {R}\), the fixed point is globally asymptotically stable. We have a simplified version of the above theorem in Appendix.
2.2 Stability of System (\(\star \)) with Cobweb Diagram
In the theory of Discrete Dynamical Systems, we usually use cobweb diagram in order to understand the dynamics of one-dimensional maps.
To apply the cobweb diagram for the two dimensional system (\(\star \)), we take function \(y=f(x)\) instead of the diagonal line \(y=x\) and apply the same procedure as we do in the usual cobweb diagram. Starting with \(x_0\), we have
By Theorem 1 and the visual representation of the above sequence we can conclude that, for system (\(\star \)), the stability on cobweb diagram implies the stability on phase diagram. In fact, the above sequence itself is one of the orbits of the system if we start at \((x_0,g(x_0))\).
Remark 6
Theorem 1 gives the stability condition for system (\(\star \)) by using Theorem 1 and Theorem 1 allows us to use the cobweb diagram. However, cobweb diagram can also be used for the system (1). One can confirm that by following the orbit starting with \((x_0,0)\). For this case, the iteration might lead to significant different future behavior including chaos.
Example 1
Consider the discrete system (\(\star \)) with \(f:[-\frac{1}{2},2)\rightarrow [-2,8)\), \(f(x)=4x\) and \(g:[-1,2)\rightarrow [-1,8)\), \(g(x)=x^3\). Hence, we have
Both f and g are continuous on their domains. The only fixed point in the given region is (0, 0). It is clear that the first condition of Theorem 1 holds. Therefore, (0, 0) is asymptotically stable on the region \([-1,2)\times [-2,8)\). Figure 2 represents the cobweb diagram and the phase diagram for the system.

Stability with cobweb diagram for the 2-dimensional map in Example 1
Example 2
Consider the following discrete-time system:
(0, 0) is a fixed point. We have \(f:(-\frac{\pi }{2},\frac{\pi }{2})\rightarrow \mathbb {R}\), \(f(x)=\tan x\) and \(g:\mathbb {R}\rightarrow \mathbb {R}\), \(g(x)=-\frac{1}{3}(x+\sin x)\) and the functions are continuous. Since
for \(x>0\), the third condition of Theorem 1 is satisfied. Therefore, the fixed point (0, 0) is globally asymptotically stable on \(\mathbb {R}^2\).
Main Theorem 2
Consider the two-dimensional map
and the following one-dimensional map
where \(f:A\rightarrow B=f(A)\) and \(g:C\rightarrow D=g(C)\) are continuous functions, with \(A\subset C\), \(D\subset B\), and \(F=f^{-1}\circ g\). Let \((\bar{x},\bar{y})\) be a fixed point of system (\(\star \)).
Then, \(\bar{x}\) is a fixed point of system (8) and \(\bar{x}\) of system (8) is asymptotically stable if and only if \((\bar{x},\bar{y})\) of system (\(\star \)) is asymptotically stable.
Remark 7
Theorem 2 is the direct conclusion of Lemma 1 and Theorem 1. In order to analyze the stability of system (\(\star \)), we simply take difference Eq. (8) and investigate the stability which is much easier.
Example 3
Consider the 2-dimensional map with one parameter
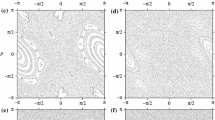
where \(k>0.\) For \(k=1\), fixed point (0, 0) is non-hyperbolic with \(\lambda _{1,2}=\pm i\). Applying Theorem 2, we have one-dimensional map \(x_{n+1}=-k\arctan (x_n e^{-x_n})\) and the fixed point \(x^*=0\) of this map is globally asymptotically stable when \(k\le 1\). Therefore the fixed point \((x^*,y^*)=(0,0)\) of two-dimensional system (9) is also globally asymptotically stable when \(k\le 1\). Figure 3 displays the phase diagram of system (9) before \((k<1)\) and after \((k>1)\) the bifurcation.

System in Example 3
Details about types of bifurcation can be found in Elaydi (2008); Kuznetsov (1995).
3 Conclusions
We gave an analytical method to analyze the stability of 2-dimensional discrete time systems of the form (\(\star \)). Stability condition was defined in a rectangular region. By using geometric approach, we can easily determine the stability of the system. Even for the non-hyperbolic case, the condition for stability is valid. Note that the stability conditions in the rectangular region does not tell anything about the case when the initial point is outside the region. As a further study, we will investigate more general systems and basin of attractions of fixed points. Also, we will study the case where \(f^{-1}\) does not necessarily exist. Although this case is geometrically clear, it needs further work.
We will also study the local and global stable/unstable manifolds of the system which requires solving some functional equations.
Another issue to be investigated is converting discrete systems to system (\(\star \)). The main question is which systems are appropriate for that.
References
Elaydi, S.: An Introduction to Difference Equations. Springer, New York (2000)
Elaydi, S.: Discrete Chaos: With Applications in Science and Engineering, 2nd edn. Chapman & Hall/CRC, Boca Raton (2008)
Devaney, R.L.: An Introduction to Chaotic Dynamical Systems, vol. 13046. Addison-Wesley, Reading (1989)
Kuznetsov, Y.A.: Elements of Applied Bifurcation Theory. Springer, New York (1995). ISBN 0-387-94418-4
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
A Related Lemmas/Theorems
A Related Lemmas/Theorems
Theorem 3
Let z be an attracting fixed point of a continuous map \(f:I\rightarrow \mathbb {R}\), where I is an interval. Then z is stable.
Proof of the theorem can be found in Elaydi (2008).
Lemma 2
Let \(f:\mathbb {R}\rightarrow \mathbb {R}\) and \(g:\mathbb {R}\rightarrow \mathbb {R}\) are continuous functions and \(f(\bar{x})=g(\bar{x})=\bar{y}\) for some \(\bar{x}\in \mathbb {R}\). Assume that one of the following conditions is satisfied for all real \(\alpha > 0\):
-
(1)
\(f(\bar{x}-\alpha )<g(\bar{x}-\alpha )<\bar{y}<g(\bar{x}+\alpha )<f(\bar{x}+\alpha )\)
-
(2)
\(f(\bar{x}+\alpha )<g(\bar{x}+\alpha )<\bar{y}<g(\bar{x}-\alpha )<f(\bar{x}-\alpha )\)
-
(3)
\(f(\bar{x}-\alpha )<g(\bar{x}+\alpha )<\bar{y}<g(\bar{x}-\alpha )<f(\bar{x}+\alpha )\)
-
(4)
\(f(\bar{x}+\alpha )<g(\bar{x}-\alpha )<\bar{y}<g(\bar{x}+\alpha )<f(\bar{x}-\alpha )\)
Then, for any \(x_0\), \((f^{-1}\circ g)^n(x_0)\rightarrow \bar{x}\) as \(n\rightarrow \infty \), provided \(f^{-1}\) exists.
Theorem 4
Given the discrete dynamical system
where \(f,g:\mathbb {R}\rightarrow \mathbb {R}\) are continuous functions. Assume that \((\bar{x},\bar{y})\) is a fixed point of system (\(\star \)) and one of the following conditions is satisfied for all real \(\alpha >0\):
-
(1)
\(f(\bar{x}-\alpha )<g(\bar{x}-\alpha )<\bar{y}<g(\bar{x}+\alpha )<f(\bar{x}+\alpha )\)
-
(2)
\(f(\bar{x}+\alpha )<g(\bar{x}+\alpha )<\bar{y}<g(\bar{x}-\alpha )<f(\bar{x}-\alpha )\)
-
(3)
\(f(\bar{x}-\alpha )<g(\bar{x}+\alpha )<\bar{y}<g(\bar{x}-\alpha )<f(\bar{x}+\alpha )\)
-
(4)
\(f(\bar{x}+\alpha )<g(\bar{x}-\alpha )<\bar{y}<g(\bar{x}+\alpha )<f(\bar{x}-\alpha )\)
Then \((\bar{x},\bar{y})\) is globally asymptotically stable on \(\mathbb {R}^2\).
Rights and permissions
Copyright information
© 2016 Springer International Publishing Switzerland
About this paper
Cite this paper
Kapçak, S. (2016). Stability of a Certain 2-Dimensional Map with Cobweb Diagram. In: Gervasi, O., et al. Computational Science and Its Applications – ICCSA 2016. ICCSA 2016. Lecture Notes in Computer Science(), vol 9786. Springer, Cham. https://doi.org/10.1007/978-3-319-42085-1_4
Download citation
DOI: https://doi.org/10.1007/978-3-319-42085-1_4
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-42084-4
Online ISBN: 978-3-319-42085-1
eBook Packages: Computer ScienceComputer Science (R0)