
Abstract
Receptors are the most important targets for therapeutic drugs [570]. Therefore, it is important to explore the mechanisms of receptor modulation and drug action in intact in vivo systems. Also, the need for a more mechanism-based approach in pharmacokinetic-dynamic modeling has been increasingly recognized [571, 572]. Hill [573] made the first explicit mathematical model of simulated drug action to account for the time courses and concentration–effect curves obtained when nicotine was used to provoke contraction of the frog rectus abdominis muscle.
The master of the oracle at Delphi does not say anything and does not conceal anything, only hints.
Heraclitus of Ephesus (544–483 BC)
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others

Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
Receptors are the most important targets for therapeutic drugs [570]. Therefore, it is important to explore the mechanisms of receptor modulation and drug action in intact in vivo systems. Also, the need for a more mechanism-based approach in pharmacokinetic-dynamic modeling has been increasingly recognized [571, 572]. Hill [573] made the first explicit mathematical model of simulated drug action to account for the time courses and concentration–effect curves obtained when nicotine was used to provoke contraction of the frog rectus abdominis muscle.
Simple mathematical calculations by the first pharmacologists in the 1930s indicated that structurally specific drugs exert their action in very small doses and do not act on all molecules of the body but only on certain ones, those that constitute the drug receptors. For example, Clark [574] calculated that ouabain applied to the cells of the heart ventricle, isolated from the toad, would cover only 2. 5% of the cellular surface. These observations prompted Clark [574, 575] to apply the mathematical approaches used in enzyme kinetics to the effects of chemicals on tissues, and this formed the basis of the occupancy theory for drug–receptor interaction. Thus, pharmacological receptor models preceded accurate knowledge of receptors by many years.
1 Occupancy Theory in Pharmacology
According to the occupancy theory , which has evolved chronologically from the original work of Clark [574, 575], the drug effect is a function of two processes:
-
binding of drug to the receptor and drug-induced activation of the receptor, and
-
propagation of this initial receptor activation into the observed pharmacological effect, where the intensity of the pharmacological effect is proportional to the number of receptor sites occupied by drug.
Therefore, the drug–receptor interaction follows the law of mass action and may be represented by the equation
where γ molecules of drug activate a receptor and give an activated receptor usually called the drug–receptor complex. Although γ is defined as the number of molecules interacting with one receptor , it is in practice merely used to provide better data fits. Rate constants k +1, k −1 characterize the association and dissociation of the complex, respectively. The ratio k −1∕k +1 is defined in pharmacology as the dissociation constant k D of the complex. The proportionality constant k 2 relates the drug–receptor complex concentration \(\upsilon \left (t\right )\) with the pharmacological effect \(E\left (t\right )\), through the equation
When the total number of receptors r 0 is occupied, the effect will be maximal:
For drug concentration \(c\left (t\right )\) and a total receptor concentration r 0 we thus have
In the equilibrium state (\(\mathop{\upsilon }\limits^{\cdot }\left (t\right ) = 0\) assumption H1) we have
where c ∗, \(\upsilon ^{{\ast}}\) are the drug and drug–receptor complex concentrations in the equilibrium, respectively. By combining the last equation with (12.2) and (12.3), we obtain the working equation for the so-called sigmoid \(E_{\max }\) model :
where E ∗ is the pharmacological effect at equilibrium. From the last equation, it can be seen that the dissociation constant k D expresses also the γ-power of drug concentration needed to induce half maximal effect (\(E_{\max }/2\)). When γ is set to 1, the model is called the basic \(E_{\max }\) model, but this model offers less flexibility in the shape of the function compared to the sigmoid \(E_{\max }\) model.
Assuming relatively rapid drug–receptor equilibrium with respect to \(c\left (t\right )\) variations, then \(c^{{\ast}}\approx c\left (t\right )\) (assumption H2), so the previous equation becomes
where \(E^{{\ast}}\left (t\right )\) indicates that the effect is driven by the pharmacokinetic time.
With γ = 1, (12.6) has been used extensively in pharmacology to describe the effect of chemicals on tissues in the modified form:
where \(\varepsilon\) is the intrinsic efficacy (inherent ability of the chemical to induce a physiological response). In other words, \(\varepsilon\) is the proportionality constant k 2 relating the receptor density r 0 with the maximal effect \(E_{\max }\) (12.3). In order to avoid the use of the efficacy term (due to its ad hoc nature), Black and Leff [576] introduced in 1983 the operational model of drug action
where ρ is equal to the ratio of the receptor density over the concentration of the complex that produces 50% of the maximal tissue response. In reality, this constant ratio characterizes the propensity of a given chemical–tissue system to yield a response.
Since the development of the occupancy theory , the mathematical models used to explain the action of ligands at receptors have been subject to continuous development prompted by new experimental observations. Currently, pharmacological studies deal with drug–receptor or drug–tissue interactions to get estimates for receptor (tissue) affinity and capacity. Thus, the operational model enjoys widespread application in the field of functional receptor pharmacology [577]. Although this model is routinely applied to in vitro studies, the estimates for receptor affinity and capacity can be used for prediction of the effect in vivo. In principle, k D should be of the same order as the unbound Ec 50 γ, where Ec 50 is the concentration at half maximal effect in vivo. In this context, Visser et al. [578] correlated the in vitro measurements with in vivo observations in rats when studying the effect of γ-aminobutyric acid receptor modulators on the electroencephalogram .
2 Empirical Pharmacodynamic Models
Combined pharmacokinetic-dynamic studies seek to characterize the time course of drug effects through the application of mathematical modeling to dose–effect–time data. This definition places particular emphasis on the time course of drug action. Pharmacodynamics is intrinsically related to pharmacokinetics , which encompasses the study of movement of drugs into, through, and out of the body. The term pharmacodynamic models exclusively refers to those models that relate drug concentration with the pharmacological effect.
The most common function used to relate drug concentration c with effect is the \(E_{\max }\) model:
where \(E_{\max }\) is the maximum effect and Ec 50 is the concentration at half the maximal observable in vivo effect. Equation (12.8) corresponds to (12.6) with Ec 50 γ substituting k D . It is also clear that (12.8) is a static nonlinear model in which c corresponds to the equilibrium point c ∗. If we consider c as a time course \(c\left (t\right )\), we must implicitly assume that equilibrium is achieved rapidly throughout \(c\left (t\right )\), so \(c^{{\ast}}\equiv c\left (t\right )\) (assumption H2).
If a baseline E 0 is introduced to the previous equation,
we obtain the \(E_{\max }\) model describing either stimulation or inhibition of the effect by the concentration of the drug. Parameters \(E_{\max }\), Ec 50, and γ are assumed constant and independent of the drug dose as well as the drug and receptor concentrations.
Other simpler empirical models have also been used since the early days of pharmacodynamics [579, 580] to describe the drug concentration–effect relationship. The linear model relies on a linear relationship between E and c:
where α is the slope indicating the sensitivity of the effect to concentration changes. The intercept β can be viewed as the baseline effect. Equation (12.9) reveals that the linearity between c and E is unlimited, and this feature is undoubtedly a drawback of the model. Besides, a log-linear model between E and c can also be considered:
Due to the logarithmic expression of concentration in this model a larger concentration range is related “linearly” with the effect. As a rule of thumb, 20 to 80% of the concentration range of the \(E_{\max }\) model can be approximately described with (12.10).
Although these empirical approaches may quantify and fit the data well, they do not offer a physical interpretation of the results.
3 Pharmacokinetic-Dynamic Modeling
In the mid-1960s, G. Levy [579, 580] was the first to relate the pharmacokinetic characteristics with the in vivo pharmacological response of drug using the above-mentioned linear models. In fact, as the pharmacological responses \(E\left (t\right )\) and the drug concentration \(c\left (t\right )\) can be observed simultaneously and repeatedly as a function of time, a combined pharmacokinetic-dynamic model is needed to describe these time courses. From the simple models, the discipline of pharmacokinetic-dynamic modeling emerged gradually, and in actuality even complex physiological processes controlling drug response can be modeled. The key mechanisms intrinsic to pharmacokinetic-dynamic models are the following:
-
the processes may take place under either equilibrium or nonequilibrium conditions for the pharmacodynamic part,
-
the binding of drug with the receptor may either be reversible or irreversible, and
-
the bound drug may induce its effect directly or indirectly.
A general scheme for the basic components of pharmacokinetic-dynamic models is depicted in Figure 12.1. According to this scheme, the drug at the prereceptor phase is considered to distribute to an effect compartment ; then it reacts with the receptors under equilibrium (direct link, assumption H3) or nonequilibrium (indirect-link) conditions, and finally, at the postreceptor phase , the activated receptors can either produce the response directly (direct response, assumption H4) through the transducer function \(\mathcal{T}\) (which is usually a proportionality constant like k 2 in equation 12.1) or they can interfere with an endogenous or already existing process that produces the final response (indirect response). In fact, all the processes of the general model depicted in Figure 12.1 are not necessarily incorporated in the final model used in practice. Almost always, one of these steps is considered to be the limiting one, and the model reduces to one of the basic models described below.

Schematic of the basic processes involved in pharmacokinetic (PK)-dynamic (PD) models. The phases I, II, and III refer to processes that take place in the prereceptor, receptor, and postreceptor proximity, respectively. The symbols are defined in the text
3.1 Link Models
During the first decades of the development of pharmacokinetic science, a lag time in pharmacological response after intravenous administration was often treated by applying a compartmental approach. If the plasma concentration declined in a biexponential manner, the observed pharmacodynamic effect was fitted to plasma or “tissue” compartment concentrations. Due to the lag time of effects, a successful fit was sometimes obtained between effect and tissue drug level [581]. However, there is no a priori reason to assume that the time course of a drug concentration at the effect site must be related to kinetics in tissues that mainly cause the multiexponential behavior of the plasma time–concentration course. A lag time between drug levels and dynamic effects can also occur for drugs described by a one-compartment model.
Segre [582] was the first author to consider the possibility that the time course of pharmacological effect could itself be used to describe the transfer rate of a drug to the biophase . Thus, the lag time of the effect was modeled by including two hypothetical tissue compartments between the plasma compartment and the pharmacodynamic response compartment.
The idea of Segre was further developed, in an elegant way, by Sheiner and associates [583, 584] by linking the effect compartment to a kinetic model. This approach has since been called the link model . The time course of the drug in the effect site is determined by the rates of transfer of material into and from the effect compartment ; the lag time of the effect-site concentration is controlled by the elimination rate constant of the effect compartment . The beauty of this approach is that instead of relating the pharmacodynamic response to drug concentrations in some more or less well-defined tissue, it is related to the plasma drug level, which in clinical practice is of great importance.
3.1.1 Direct Link
Strictly speaking, pharmacodynamic models are employed to relate the receptor site drug concentration to pharmacological response at any given time using data mainly from in vivo experiments. However, the receptor site drug concentration normally cannot be measured directly. Thus, the simplest pharmacokinetic-dynamic mechanistic model arises from assuming that the drug concentration in the blood, \(c\left (t\right )\) (far left compartment of Figure 12.1), is the same at the receptor site, \(y\left (t\right )\). Strictly speaking, this assumption expresses a prereceptor equilibrium (H3) and the resulting model does not utilize concentrations at the effect site.
Further, under equilibrium conditions H1, we can use (12.6) to relate the pharmacological effect E ∗ with the drug concentrations c ∗, or in addition, use (12.7) to relate the time courses \(E^{{\ast}}\left (t\right )\) and \(c^{{\ast}}\left (t\right )\) under the supplementary assumption H2. Thus, the simplest mechanistic models are once again the basic and the sigmoid \(E_{\max }\) models, but now they have a specific physical interpretation in terms of drug–receptor reaction kinetics.
As is implicit from all the above, the measured concentration in plasma is directly linked to the observed effect for these simple mechanistic, pharmacokinetic-dynamic models . Accordingly, these models are called direct-link models since the concentrations in plasma can be used directly in (12.6) and (12.7) for the description of the observed effects. Under the assumptions of the direct-link model, plasma concentration and effect maxima will occur at the same time, that is, no temporal dissociation between the time courses of concentration and effect is observed. An example of this can be seen in the direct-link sigmoid \(E_{\max }\) model of Racine-Poon et al. [585], which relates the serum concentration of the anti-immunglobulin E antibody CGP 51901, used in patients for the treatment of seasonal allergic rhinitis, with the reduction of free anti-immunglobulin E.
Under the assumptions of the direct-link model, neither a counterclockwise (Figure 12.2) nor a clockwise hysteresis loop (Figure 12.4) will be recorded in an effect vs. concentration plot. In principle, the shape of the effect vs. concentration plot for an ideal direct-link model will be a curve identical to the specific pharmacodynamic model , relating effect with concentration, e.g., linear for a linear pharmacodynamic model, sigmoid for the sigmoid \(E_{\max }\) model etc.

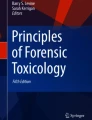
Normalized effect–plasma drug concentration state space for the indirect-link model. As time flows (indicated by arrows) a counterclockwise hysteresis loop is formed. The rate constant for drug removal from the effect compartment k y characterizes the temporal delay, that is, the degree of hysteresis
3.1.2 Indirect Link: The Effect-Compartment Model
In the direct-link model, concentration–effect relationships are established without accounting for intrinsic pharmacodynamic temporal behavior, and relationships are valid only under the assumption of effect site, prereceptor equilibrium H3. In contrast, indirect-link models are required if there is a temporal dissociation between the time courses of concentration and effect, and the observed delay in the concentration–effect relationship is most likely caused by a functional delay between the concentrations in the plasma and at the effect site.
When a lag time of \(E\left (t\right )\) is observed with respect to the \(c\left (t\right )\) time course, the use of a combined pharmacokinetic-dynamic model , the indirect-link model , is needed to relate the drug concentration \(c\left (t\right )\) to the receptor site drug concentration \(y\left (t\right )\) (which cannot be measured directly) and the \(y\left (t\right )\) to the pharmacological response \(E\left (t\right )\).Footnote 1
The effect-compartment model relaxes the assumption H3 and it stems from the assumption of prereceptor nonequilibrium between drug concentration in the blood or plasma \(c\left (t\right )\) and the receptor site \(y\left (t\right )\). According to this model, an additional compartment is considered, the effect (or biophase ) compartment, and concentration \(y\left (t\right )\) in that compartment reacts with the receptors, Figure 12.1.
Notation:
-
V c and V y denote the apparent volumes of distribution of the plasma and effect compartments , respectively.
-
k c and k y denote the first-order rate constants for the drug transfer from plasma to effect site and for drug elimination from the effect site, respectively.
Then assuming that the mass-flux equality holds for the effect compartment , i.e., V c k c = V y k y , the drug concentration \(y\left (t\right )\) in the effect compartment can be described by the linear differential equation
This equation can be solved by applying the Laplace transformation and convolution principles (cf. Appendix E):
where \(\tilde{y}\left (t\right )\) is defined as the apparent effect site drug concentration and it is given by
The time symbols \(t^{{\prime}}\), t denote the temporal dissociation between the time courses of concentration and effect, respectively. For various types of drug administration, the function \(c\left (t\right )\) is known and therefore analytic solutions for \(\tilde{y}\left (t\right )\) have been obtained using the integral defined above. Substituting (12.12) into (12.7), we obtain the fundamental equation for the \(E_{\max }\) indirect-link model:
where \(\tilde{y}_{50}\) is the apparent effect site drug concentration producing 50% of the maximum effect.
In this model, the rate constant k y was originally considered to reflect a distributional delay of drug from plasma to the effect compartment . However, it can also be regarded as a constant producing the delay in effects in relation to plasma, irrespective of whether this is caused by distributional factors, receptor events, production of a mediator of any kind, etc.
The basic feature of the indirect-link model is the counterclockwise hysteresis loop that is obtained from plotting the observed values of the effect vs. the observed plasma drug concentration values, Figure 12.2. In other words, the effect is delayed compared to the plasma drug concentration and this is reflected in the effect–concentration state space.
Numerous applications of pharmacokinetic-dynamic models incorporating a biophase (or effect) compartment for a variety of drugs that belong to miscellaneous pharmacological classes, e.g., anesthetic agents [586], opioid analgesics [587–589], barbiturates [590, 591], benzodiazepines [592], antiarrhythmics [593], have been published. The reader can refer to a handbook [594] or recent reviews [572] for a complete list of the applications of the biophase distribution model.
In actual practice, nonlinear regression is used to fit a suitable pharmacokinetic model described by the function \(c\left (t\right )\) to time–concentration data. Then, the estimated parameters are used as constants in the pharmacodynamic model to estimate the pharmacodynamic parameters. Alternatively, simultaneous fitting of the model to the concentration–effect–time data can be performed. This is recommended as \(c\left (t\right )\) and \(E\left (t\right )\) time courses are simultaneously observed.
Example 1.
Bolus Intravenous Injection
An example of the indirect-link model after bolus intravenous injection can be seen in Figure 12.3. The arrow indicates time flow. Each point represents a uniquely defined state and only one trajectory may pass from it. The state space has a point attractor , i.e., a steady state , which is obviously the point (c = 0, E ∗ = 0) reached at theoretically infinite time. Three different initial conditions of the form \(c\left (0\right ) = q_{0}/V _{c}\), \(E^{{\ast}}\left (0\right ) = 0\), are used to generate three different trajectories, all of which end up at the point attractor . The integrated equations of the system are
where q 0 is the dose, V c and k are the volume of distribution and the elimination rate constant for pharmacokinetics, k y is the effect-site elimination rate constant, \(E_{\max }\) is the maximum effect, and \(\tilde{y}_{50}\) is the concentration at which 50% of the maximum effect is observed. Parameter values were set at
where all units are arbitrary. ■

Indirect-link model with bolus intravenous injection. (a) The classical time profiles of the two variables \(c\left (t\right )\) (solid line) and \(E^{{\ast}}\left (t\right )\) (dashed line) for dose q 0 = 0. 5. (b) A two-dimensional phase space for the concentration \(c\left (t\right )\) vs. effect \(E^{{\ast}}\left (t\right )\) plot using three doses 0. 5, 0. 75, and 1 (solid, dashed, and dotted lines, respectively)
3.2 Response Models
Time is not an independent variable in the presented models. Dynamic behavior is either a consequence of the pharmacokinetics or the observed lag time by means of the effect compartment . Dynamic models from the occupancy theory and described by differential equations, such as (12.4), are scarce [595, 596].
Neglecting dynamic models in pharmacodynamics [597] is perhaps due to the fact in that instant equilibrium relationships between concentration and effect appear to occur for most drugs. For some drugs, such as cytotoxic agents, this delay is often extremely long, and attempts to model it are seldom made. One can describe these relationships as time-dissociated or nondynamic because the temporal aspects of the effect are not linked to the time–concentration profile.
In recent years, new models overcoming these defaults have been developed as the indirect physiological models introduced by Jusko and associates [598]. According to this last type of model, an endogenous substance or a receptor protein is formed at a constant rate and lost with a first-order rate constant. The drug concentration in plasma produces an effect by either stimulating or inhibiting the synthesis or removal of the endogenous substance leading to a change in the observed pharmacodynamic effect described by a suitable pharmacodynamic model .
3.2.1 Direct Response
The standard effect-compartment model, usually characterized as an atypical indirect-link model, also constitutes an example of what we will call a direct-response model in contrast to the indirect-response models . Globally, the standard direct-response models are models in which \(c\left (t\right )\) affects all dynamic processes only linearly.
3.2.2 Indirect Response
Ariens [599] was the first to describe drug action through indirect mechanisms. Later on, Nagashima et al. [600] introduced the indirect-response concept to pharmacokinetic-dynamic modeling with their work on the kinetics of the anticoagulant effect of warfarin, which is controlled by the change in the prothrombin complex synthesis rate. Today, indirect-response modeling finds extensive applications especially when endogenous substances are involved in the expression of the observed response.
From a modeling point of view, the last equilibrium assumption that can be relaxed, for the processes depicted in Figure 12.1, is H4, between the activated receptors (\(\upsilon\) variable in the occupancy model) and the response E. Instead of the activated receptors directly producing the response, they interfere with some other process, which in turn produces the response E. This mechanism is usually described mathematically with a transducer function \(\mathcal{T}\) which is no longer linear (cf. Section 12.4.1). This type of pharmacodynamic model is called indirect response and includes modeling of the response process usually through a linear differential equation of the form
where k o is a first-order rate constant , and k i represents an apparent zero-order production rate of the response. Stationarity conditions set the initial response value \(E\left (0\right )\) at the ratio k i ∕k o . Functions \(g_{i}\left (t\right )\) and \(g_{o}\left (t\right )\) depend on the drug concentration through \(E_{\max }\) functions and can produce either stimulation or inhibition , respectively:
In these expressions, \(g\left (t\right )\) is either \(g_{i}\left (t\right )\) or \(g_{o}\left (t\right )\), \(S_{\max }\) is maximum stimulation rate, \(I_{\max }\) is maximum inhibition rate with \(I_{\max } < 1\), Sc 50 and Ic 50 are the drug concentrations at which \(g\left (t\right ) = 1 + \left (S_{\max }/2\right )\) and \(g\left (t\right ) = 1 -\left (I_{\max }/2\right )\), respectively. Consequently, four basic models are formulated: inhibition of k i , inhibition of k o , stimulation of k i , and stimulation of k o , Figure 12.1.
This family of the four basic indirect-response models has been proven to characterize diverse types of pharmacodynamic effects and it constitutes the current approach for pharmacokinetic-dynamic modeling of responses generated by indirect mechanisms. Thus, indirect-response models have been used to interpret the anticoagulant effect of warfarin, adrenal suppression by corticosteroids, cell trafficking effects of corticosteroids, the antipyretic effect of ibuprofen, aldose reductase inhibition, etc. [601]. Basically, the indirect-response concept is appropriate for modeling the pharmacodynamics of drugs that act through inhibition or stimulation of the production or loss of endogenous substances or mediators.
However, the general model described above is considered to be mechanistic. It is opposed to the completely empirical approach, since it is based on a general physiological process like receptor activation. But it is too general and abstract to describe complicated drug processes. Stimulation and inhibition of a baseline through the saturable \(E_{\max }\) function is often not enough, since drugs interplay with complicated physiological processes. Thus, during the last ten years Jusko’s group and other investigators have expanded the application of indirect-response mechanisms to real mechanistic pharmacodynamic modeling and have included detailed modeling of the underlying physiology and then modeled the effect of drugs on it. These models are called extended indirect-response models [602] and they have been used to describe tolerance and rebound phenomena [603], time-dependency of the initial response [604, 605], cell trafficking dynamics [606], etc.
It is rather obvious that an indirect-response mechanism, whatever the detailed processes involved, results in a counterclockwise hysteresis loop for the effect–concentration relationship, Figure 12.2. Here, however, the elaboration of the observed response is usually secondary to a previous time-consuming synthesis or degradation of an endogenous substance(s) or mediator(s). Since both the indirect-link and indirect-response models have counterclockwise hysteresis effect–concentration plots, an approach based on the time of the maximum effect has been applied to furosemide data [607] for indirect (link or response) model selection.
When one looks into the basic functions of the link and indirect-response models, it is clear that one of the differences resides in the input functions to the effect and the receptor protein site, respectively. For the link model a linear input operates in contrast to the indirect model, where a nonlinear function operates. For the link model the time is not directly present and the pharmacological time course is exclusively dictated by the pharmacokinetic time, whereas the indirect model has its own time expressed by the differential equation describing the dynamics of the integrated response.
4 Other Pharmacodynamic Models
A number of other pharmacodynamic approaches focusing either on prereceptor or postreceptor events have been proposed in the literature and are discussed below.
4.1 The Receptor–Transducer Model
First, mention can be made of cases in which the measured effect, instead of being proportional to the activated receptors, follows a more general function \(E = \mathcal{T}\left (\upsilon \right )\). This model is called receptor–transducer and was introduced by Black and Leff [576]. The function \(\mathcal{T}\) is called a transducer function and its most common form is yet again the \(E_{\max }\) function, which when replaced in (12.5) results in an \(E_{\max }\) model but with different shape parameters called an operational model [608].
4.2 Irreversible Models
All the above-mentioned pharmacokinetic-dynamic models are characterized by reversibility of the drug–receptor interaction. In several cases, however, drug action relies on an irreversible bimolecular interaction; thus, enzyme inhibitors and chemotherapeutic agents exert their action through irreversible bimolecular interactions with enzymes and cells (bacteria, parasites, viruses), respectively.
The irreversible inactivation of endogenous enzymes caused by drugs, e.g., the antiplatelet effect of aspirin after oral administration [609], the 5α-reductase inhibition by a new nonsteroidal inhibitor [610], and the H+, K+-ATPase inactivation by proton pump inhibitors [611], is modeled with turnover models. The simplest model [609] includes terms for the production rate k i and loss rate k o of the response E, coupled with a function \(g\left (c\right )\) representing the change of plasma or effect-compartment drug concentration:
where k i and k o have the same meaning as defined for (12.14) while the function \(g\left (c\right )\) is either linear or of Michaelian type.
The models used for the irreversible effects of chemotherapeutic agents quantify the response \(E\left (t\right )\) in terms of the cell number since irreversible inactivation leads to cell killing. In these models, the function of the natural proliferation of cells \(r\left (E\right )\) is combined with the cell-killing function \(g\left (c\right )\), which again represents the change of plasma or effect-compartment drug concentration:
The function \(r\left (E\right )\) can take various forms describing the natural growth of the cell population in the absence of drug [539, 612], while \(g\left (c\right )\) can be either linear or nonlinear [602, 613, 614]. Due to the competitive character of the functions \(r\left (E\right )\) and \(g\left (c\right )\), the cell number vs. time plots are usually biphasic with the minimum effective concentration of drug being the major determinant for the killing or regrowth phases of the plot.
4.3 Time-Variant Models
Contrary to the already mentioned models, which include constant parameters, pharmacodynamic models may include time-varying parameters as well. Typical examples include models of drug tolerance or sensitization , where the parameters vary as a function of the dosing history. Other examples concern modeling of circadian rhythms where parameters depend explicitly on time through biological clocks, e.g., the baseline of a pharmacological response, and it is necessary to include periodicity in the pharmacokinetic-dynamic modeling . This is usually done by empirical periodic functions directly on the baseline, such as trigonometric functions, for example. An example is the effect of fluticasone propionate on cortisol [605]. All models associated with these phenomena are called time-variant.
4.3.1 Drug Tolerance
This phenomenon is characterized by a reduction in effect intensity after repeated drug administration. The explanation for the diminution of the effect as a function of time is attributed either to a decrease in receptor affinity or a decrease in the number of receptors. These changes result in a clockwise hysteresis loop when the effect is plotted vs. the plasma concentration, Figure 12.4. Usually, tolerance phenomena are discussed with respect to the \(E_{\max }\) model. In this case, tolerance is associated with either a decrease in \(E_{\max }\) over time or an increase in Ec 50 γ over time (12.8). An example of this kind of time dependency is the work of Meibohm et al. [615] on the suppression of cortisol by triamcinolone acetonide during prolonged therapy.

Normalized effect–plasma drug concentration state space for tolerance phenomena. As time flows (indicated by arrows) a clockwise hysteresis loop is formed
Apart from the decrease in the number or affinity of the receptors, more complex mechanisms have been proposed for tolerance phenomena. In the so-called counterregulation models, the development of tolerance is driven by the primary effect of drug perhaps via an intermediary transduction step. This mechanism was postulated by Bauer and Fung [616] for hemodynamic tolerance to nitroglycerine. According to these authors, initial nitroglycerin-induced vasodilatation controls the counterregulatory vasoconstrictive effect. Moreover, the desensitization of receptors can reduce the drug effects on prolonged exposure. The receptor-inactivation theory [617] can be used to model this mechanism.
4.3.2 Drug Sensitization
This term is used to describe the increase in pharmacological response with time to the same drug concentration. The up-regulation of receptors is considered to be the primary cause for sensitization. This phenomenon is observed when the negative feedback of an agonist is removed. A clinical example of sensitization is the chronic administration of beta-blockers, which induces up-regulation of beta-adrenoreceptors. This leads to increased adenyl cyclase activity and hypersensitivity to catecholamines after sudden withdrawal of the antagonist [618]. Due to the increase of the effect over time in sensitization phenomena, the effect–plasma concentration plots have a counterclockwise hysteresis loop, Figure 12.2.
4.4 Dynamic Nonlinear Models
Using the approach of Sheiner and Verotta [619], a large number of pharmacodynamic models can be considered as hierarchical models composed of a series of submodels. These submodels are linear or nonlinear, static or dynamic input–output , elementary models. Several possible combinations of such submodels have been considered, but they have systematically associated the linear with dynamic features, and the nonlinear with static ones. Is there hesitation or fear of using nonlinear dynamics in the traditional pharmacokinetic-dynamic modeling context?
The most interesting case arises by removing assumption H1, i.e., when the reaction between drug and receptor is not at equilibrium [595]. This happens when relatively slow rates of association and dissociation of the complex are observed. Under these conditions, a slow dynamic receptor-binding model is most applicable. By maintaining the proportionality between the effect and the concentration of the drug–receptor complex, (12.4) can be written in terms of the effect
This equation is a nonlinear differential equation describing the time course of the effect and using an intrinsic pharmacodynamic time. An application of this model can be found in the work of Shimada et al. [596], who applied the drug–receptor nonequilibrium assumption to model the pharmacodynamics of eight calcium channel-blocking agents in hypertensive patients on the basis of their in vitro binding data. This model is rarely used because it produces profiles similar to the indirect-link model described above. However, the drug–receptor nonequilibrium model has more theoretical and practical interest since more complex solutions are also feasible by adding a feedback component to the effect of the drug [620]. The resulting model has a very rich dynamic behavior and is the essence of Chapter 13
Table 12.1 summarizes assumptions and equations for the above-presented pharmacodynamic models.
5 Unification of Pharmacodynamic Models
Historically, delays between drug exposure and effect have been described with the so-called effect-compartment model, first described by Segre [582] and popularized by Sheiner and coworkers [583, 584]. Recently, Dayneka [598] focused attention on a set of indirect-effect models to introduce intrinsic pharmacodynamic time. The relevance of combined pharmacokinetic-dynamic modeling has been largely recognized [621, 622]. The discussion in Section 12.3 indicates that the development of the various pharmacokinetic-dynamic models was based on the dominating assumption for one of the drug processes depicted in Figure 12.1. Thus, the pharmacokinetic-dynamic models can be classified kinetically on the basis of the assumptions associated with:
-
the prereceptor equilibrium,
-
the drug–receptor interaction, and
-
the postreceptor equilibrium.
A very general scheme for relating effects to concentration, of which both the effect-compartment and the indirect-effect models are special cases, was outlined by Sheiner and Verotta [619]. The models presented in the study can be considered to be a special case of that unified scheme. As judiciously presented by these authors, both direct-response and indirect-response models are composed of one nonlinear static submodel and one dynamic submodel, but the placement of the submodels in the global model differs:
-
In a direct-response model, the output of a linear dynamic model (the link model ) with input \(c\left (t\right )\) drives a nonlinear static model (usually the \(E_{\max }\) model) to produce the observed response.
-
In an indirect-response model, the above order of models is reversed and now the static model precedes the dynamic one. The dynamic model describes the formation and loss of the response variable through a linear differential equation whose parameters are nonlinear saturable forms of the driving concentration \(c\left (t\right )\).
All these models introducing the prereceptor and postreceptor events have an interesting appeal with respect to physiologically implied mechanisms. Sheiner and Verotta [619] pointed out the importance of knowing where the rate-limiting step is located in a series of events from pre- to postreceptor drug interactions.
The fundamental assumption and equations governing the effect–concentration relationship for each one of the models considered are listed in Table 12.1. The presence or not of a hysteresis loop in the effect–plasma concentration plot of each model is also quoted in Table 12.1. At present, the methodology for performing efficient pharmacokinetic-dynamic modeling is well established [572, 623, 624].
Notes
- 1.
In the classical pharmacokinetic-pharmacodynamic literature, the effect-site concentration and the effect-site elimination rate constant are denoted by c E and k E0, respectively. Here, the symbols \(y\left (t\right )\) and k y are used instead.
Bibliography
Seber, G., Wild, C.: Nonlinear Regression Analysis. Wiley Series in Probability and Mathematical Statistics. Wiley, New York (1989)
Black, J.: Receptors as pharmaceutical targets. In: Foreman, J., Johansen, T. (eds.) Textbook of Receptor Pharmacology, 2nd edn., pp. 271–278. CRC, New York (2002)
Gieschke, R., Reigner, B., Steimer, J.: Exploring clinical study design by computer simulation based on pharmacokinetic/pharmacodynamic modelling. Int. J. Clin. Pharmacol. Ther. 55(10), 469–474 (1997)
Derendorf, H., Meibohm, B.: Modeling of pharmacokinetic/pharmacodynamic (PK/PD) relationships: concepts and perspectives. Pharm. Res. 16(2), 176–185 (1999)
Hill, A.: The mode of action of nicotine and curari, determined by the form of the contraction curve and the method of temperature coefficients. J. Physiol. 39, 361–373 (1909)
Clark, A.: Applied Pharmacology, 5th edn. Churchill, London (1933)
Clark, A.: General Pharmacology. Handbook of Experimental Pharmacology Series, vol. 4. Springer, Berlin (1937)
Black, J., Leff, P.: Operational models of pharmacological agonism. Proc. R. Soc. Lond. B. Biol. Sci. 220(1219), 141–162 (1983)
Kenakin, T.: Principles: receptor theory in pharmacology. Trends Pharmacol. Sci. 25(4), 186–192 (2004)
Visser, S., Wolters, F., Gubbens-Stibbe, J., Tukker, E., VanDerGraaf, P., Peletier, L., Danhof, M.: Mechanism-based pharmacokinetic/pharmacodynamic modeling of the electroencephalogram effects of GABAA receptor modulators: in vitro-in vivo correlations. J. Pharmacol. Exp. Ther. 304(1), 88–101 (2003)
Levy, G.: Relationship between elimination rate of drugs and rate of decline of their pharmacological effects. J. Pharm. Sci. 53, 342–343 (1964)
Levy, G.: Kinetics of pharmacologic effects. Clin. Pharmacol. Ther. 7, 362–372 (1966)
Wagner, J., Aghajanian, G., Bing, O.: Correlation of performance test scores with ‘tissue concentration’ of lysergic acid diethylamide in human subjects. Clin. Pharmacol. Ther. 9(5), 635–638 (1968)
Segre, G.: Kinetics of interaction between drugs and biological systems. Il Farmaco 23, 907–918 (1968)
Sheiner, L., Stanski, D., Vozeh, S., Miller, R., Ham, J.: Simultaneous modeling of pharmacokinetics and pharmacodynamics: application to d-tubocurarine. Clin. Pharmacol. Ther. 25(3), 358–371 (1979)
Holford, N., Sheiner, L.: Kinetics of pharmacologic response. Pharmacol. Ther. 16, 143–166 (1982)
Racine-Poon, A., Botta, L., Chang, T., Davis, F., Gygax, D., Liou, R., Rohane, P., Staehelin, T., VanSteijn, A., Frank, W.: Efficacy, pharmacodynamics, and pharmacokinetics of CGP 51901, an anti-immunoglobulin E chimeric monoclonal antibody, in patients with seasonal allergic rhinitis. Clin. Pharmacol. Ther. 62(6), 675–690 (1997)
D’Hollander, A., Delcroix, C.: An analytical pharmacodynamic model for nondepolarizing neuromuscular blocking agents. J. Pharmacokinet. Biopharm. 9(1), 27–40 (1981)
Perry, S., Inturrisi, C.: Analgesia and morphine disposition in burn patients. J. Burn Care Rehabil. 4(4), 276–279 (1983)
Scott, J., Cooke, J., Stanski, D.: Electroencephalographic quantitation of opioid effect: comparative pharmacodynamics of fentanyl and sufentanil. Anesthesiology 74(1), 34–42 (1991)
Stanski, D., Hudson, R., Homer, T., Saidman, L., Meathe, E.: Pharmacodynamic modeling of thiopental anesthesia. J. Pharmacokinet. Biopharm. 12(2), 223–240 (1984)
Homer, T., Stanski, D.: The effect of increasing age on thiopental disposition and anesthetic requirement. Anesthesiology 62(6), 714–724 (1985)
Dingemanse, J., Haussler, J., Hering, W., Ihmsen, H., Albrecht, S., Zell, M., Schwilden, H., Schuttler, J.: Pharmacokinetic-pharmacodynamic modelling of the EEG effects of Ro 48-6791, a new short-acting benzodiazepine, in young and elderly subjects. Br. J. Anaesth. 79(5), 567–574 (1997)
Salazar, D., Much, D., Nichola, P., Seibold, J., Shindler, D., Slugg, P.: A pharmacokinetic-pharmacodynamic model of d-sotalol Q-Tc prolongation during intravenous administration to healthy subjects. J. Clin. Pharmacol. 37(9), 799–809 (1997)
Derendorf, H., Hochhaus, G.: Handbook of Pharmacokinetic/Pharmacodynamic Correlation. CRC, Boca Raton (1995)
Iliadis, A., Cano, J.: A new pharmacodynamic modelling approach based on receptors theory. In: Aiache, J., Hirtz, J. (eds.) 3th European Congress of Biopharmaceutics and Pharmacokinetics, vol. 3, pp. 65–74. Imprimerie de l’Universite, Clermont-Ferrand/Freiburg (1987)
Shimada, S., Nakajima, Y., Yamamoto, K., Sawada, Y., Iga, T.: Comparative pharmacodynamics of eight calcium channel blocking agents in Japanese essential hypertensive patients. Biol. Pharm. Bull. 19(3), 430–437 (1996)
Karlsson, M., Molnar, V., Bergh, J., Freijs, A., Larsson, R.: A general model for time-dissociated pharmacokinetic-pharmacodynamic relationships exemplified by paclitaxel myelosuppression. Clin. Pharmacol. Ther. 63, 11–25 (1998)
Dayneka, N., Garg, V., Jusko, W.: Comparison of four basic models of indirect pharmacodynamic response. J. Pharmacokinet. Biopharm. 21(4), 457–478 (1993)
Ariens, E.: Affinity and intrinsic activity in the theory of competitive inhibition. I. Problems and theory. Archives Internationales de Pharmacodynamie et de Therapie 99(1), 32–49 (1954)
Nagashima, R., O’Reilly, R., Levy, G.: Kinetics of pharmacologic effects in man: the anticoagulant action of warfarin. Clin. Pharmacol. Ther. 10, 22–35 (1969)
Jusko, W., Ko, H.: Physiologic indirect response models characterize diverse types of pharmacodynamic effects. Clin. Pharmacol. Ther. 56(4), 406–419 (1994)
Mager, D., Wyska, E., Jusko, W.: Diversity of mechanism-based pharmacodynamic models. Drug Metab. Dispos. 31(5), 510–518 (2003)
Sharma, A., Ebling, W., Jusko, W.: Precursor-dependent indirect pharmacodynamic response model for tolerance and rebound phenomena. J. Pharm. Sci. 87(12), 1577–1584 (1998)
Lew, K., Ludwig, E., Milad, M., Donovan, K., Middleton, E., Ferry, J., Jusko, W.: Gender-based effects on methylprednisolone pharmacokinetics and pharmacodynamics. Clin. Pharmacol. Ther. 54(4), 402–414 (1993)
Chakraborty, A., Krzyzanski, W., Jusko, W.: Mathematical modeling of circadian cortisol concentrations using indirect response models: comparison of several methods. J. Pharmacokinet. Biopharm. 27(1), 23–43 (1999)
Li, H., Meno-Tetang, G., Chiba, K., Arima, N., Heining, P., Jusko, W.: Pharmacokinetics and cell trafficking dynamics of 2-Amino-2-[2-(4-octylphenyl)ethyl]propane-1,3-diol Hydrochloride (FTY720) in cynomolgus monkeys after single oral and intravenous doses. J. Pharmacol. Exp. Ther. 301(2), 519–526 (2002)
Wakelkamp, M., Alvan, G., Paintaud, G.: The time of maximum effect for model selection in pharmacokinetic-pharmacodynamic analysis applied to frusemide. Br. J. Clin. Pharmacol. 45(1), 63–70 (1998)
Trzeciakowski, J.: Analysis of stimulus-response chains using nonlinear dynamics. J. Pharmacol. Toxicol. Methods 36(2), 103–121 (1996)
Yamamoto, K., Abe, M., Katashima, M., Yamada, Y., Sawada, Y., Iga, T.: Pharmacodynamic analysis of antiplatelet effect of aspirin in the literature. Modeling based on inhibition of cyclooxygenase in the platelet and the vessel wall endothelium. Jpn. J. Hosp. Pharm. 22, 133–141 (1996)
Katashima, M., Yamamoto, K., Tokuma, Y., Hata, T., Sawada, Y., Iga, T.: Pharmacokinetic and pharmacodynamic study of a new nonsteroidal 5 alpha-reductase inhibitor, 4-[3-[3-[Bis(4-isobutylphenyl)methylamino]benzoyl]-1H-indol-1-yl]-butyric acid, in rats. J. Pharmacol. Exp. Ther. 284(3), 914–920 (1998)
Abelo, A., Eriksson, U., Karlsson, M., Larsson, H., Gabrielsson, J.: A turnover model of irreversible inhibition of gastric acid secretion by omeprazole in the dog. J. Pharmacol. Exp. Ther. 295(2), 662–669 (2000)
Mouton, J., Vinks, A., Punt, N.: Pharmacokinetic-pharmacodynamic modeling of activity of ceftazidime during continuous and intermittent infusion. Antimicrob. Agents Chemother. 41(4), 733–738 (1997)
Jusko, W.: Pharmacodynamics of chemotherapeutic effects: dose-time-response relationships for phase-nonspecific agents. J. Pharm. Sci. 60(6), 892–895 (1971)
Zhi, J., Nightingale, C., Quintiliani, R.: Microbial pharmacodynamics of piperacillin in neutropenic mice of systematic infection due to Pseudomonas aeruginosa. J. Pharmacokinet. Biopharm. 16(4), 355–375 (1988)
Meibohm, B., Hochhaus, G., Derendorf, H.: Time dependency of the pharmacologic response to glucocorticoids. Clin. Pharmacol. Ther. 61(2), 155 (PI–71) 1997
Bauer, J., Fung, H.: Pharmacodynamic models of nitroglycerin-induced hemodynamic tolerance in experimental heart failure. Pharm. Res. 11(6), 816–823 (1994)
Kenakin, T.: Pharmacological Analysis of Drug-Receptor Interaction. Lippincott-Raven, New York (1997)
VanDenMeiracker, A., ManIn’tVeld, A., Boomsma, F., Fischberg, D., Molinoff, P., and Schalekamp, M.: Hemodynamic and beta-adrenergic receptor adaptations during long-term beta-adrenoceptor blockade. Studies with acebutolol, atenolol, pindolol, and propranolol in hypertensive patients. Circulation 80(4), 903–914 (1989)
Sheiner, L., Verotta, D.: Further notes on physiologic indirect response models. Clin. Pharmacol. Ther. 58(2), 238–240 (1995)
Tallarida, R.: Further characterization of a control model for ligand-receptor interaction: phase plane geometry, stability, and oscillation. Ann. Biomed. Eng. 18, 671–684 (1990)
Paalzow, L.: Integrated pharmacokinetic-dynamic modeling of drugs acting on the CNS. Drug Metab. Rev. 15, 383–400 (1984)
Perez-Urizar, J., Granados-Soto, V., Flores-Murrieta, F., Castaneda-Hernandez, G.: Pharmacokinetic-pharmacodynamic modeling: why? Arch. Med. Res. 31, 539–545 (2000)
Gabrielsson, J., Weiner, D.: Methodology for pharmacokinetic/pharmacodynamic data analysis. Pharm. Sci. Technol. Today 2(6), 244–252 (1999)
Meibohm, B., Derendorf, H.: Pharmacokinetic/pharmacodynamic studies in drug product development. J. Pharm. Sci. 91(1), 18–31 (2002)
Author information
Authors and Affiliations
Rights and permissions
Copyright information
© 2016 Springer International Publishing Switzerland
About this chapter
Cite this chapter
Macheras, P., Iliadis, A. (2016). Classical Pharmacodynamics. In: Modeling in Biopharmaceutics, Pharmacokinetics and Pharmacodynamics. Interdisciplinary Applied Mathematics, vol 30 . Springer, Cham. https://doi.org/10.1007/978-3-319-27598-7_12
Download citation
DOI: https://doi.org/10.1007/978-3-319-27598-7_12
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-27596-3
Online ISBN: 978-3-319-27598-7
eBook Packages: Mathematics and StatisticsMathematics and Statistics (R0)