
Abstract
Tire models for vehicle dynamics studies have been developed for many years to suit the needs of automobiles and the automotive industry. Recently, the growing use of advanced simulation techniques in design of wheeled mobile robots calls for analysis of the possibility to use the existing automotive tire models in the wheeled mobile robots dynamics studies. This analysis is especially important in the case of the skid-steered lightweight mobile robots, which are very common type of design, but exhibit many differences in the tire–ground system as compared to a typical car. In the present work the differences between lightweight wheeled robots and automobiles are examined in the following areas: tires, environment, maneuvers, ways of control, and vehicle systems. The influence of the found differences on the tire–ground system is examined in detail. Finally, the requirements for the tire models of the lightweight wheeled mobile robots are formulated with emphasis on the requirements different than those for tire models of the automobiles.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
In the process of design of wheeled mobile robots, the modern methods of computer-aided engineering analysis (CAE) become more widespread and more important. This design approach is promoted in the 2014–2020 strategic research agenda proposed by the public private partnership for robotics in Europe—SPARC [1] under the topic of “Improving Designs and Systems”.
Computer-aided engineering methods enable development of virtual prototypes of machines and investigation of their dynamic properties in advance of building physical prototypes.
The virtual prototypes of mobile robots are based on mathematical models of dynamics, in which the key element is the model describing the effector interaction with environment. The purpose of this model is determination of forces and moments of force, which besides the gravity force, virtually alone determine motion of a robot. In case of the wheeled mobile robots, the role of effectors is played by wheels, most often equipped with rubber tires which interact with grounds of various properties.
So far, the problems of modeling of the tire–ground system were tackled mainly from the point of view of requirements of automotive vehicles, which over the years resulted in development of multiple tire models with diverse capabilities [2]. However, it turns out that the wheeled mobile robots, especially lightweight robots, differ significantly from automotive vehicles in terms of applications, maneuvers performed, types of ground, vehicle design, and parameters of tires. It seems that there is very little work done so far in the field of modeling of tire–road interaction for lightweight wheeled robots. This gap is sometimes noticed by researchers as in [3], where authors observe that tire–terrain models for lightweight robots on rigid terrain are not as readily available as models for heavier vehicles. Several studies concern wheel–terrain interaction of planetary rovers, where a rigid wheel is considered [4] or a flexible wheel of special design made primarily of metal [5].
Aim of the present work is to determine specific requirements with respect to tire models of the lightweight wheeled mobile robots.
This is the starting point for analysis of the existing automotive tire models from the point of view of their application in simulation studies of the lightweight wheeled mobile robots, which is planned by the authors.
2 Scope and Method of Analysis
In the present work requirements for tire models of the wheeled mobile robots will be determined as a result of the analysis carried out according to the procedure outlined below.
-
Step 1.
Analysis of differences between automobiles (especially passenger cars) and lightweight wheeled mobile robots in the following areas which affect the tire–ground system:
-
tires,
-
environment,
-
vehicle systems,
-
ways of control,
-
maneuvers,
-
allowable extreme vehicle body motions.
-
The first step of the analysis is based on the literature studies, documentation of the Proteus Project [6], and consultations with the specialists from Industrial Research Institute for Automation and Measurements PIAP.
-
Step 2.
Analysis of the influence of the differences between automobiles and lightweight wheeled mobile robots identified in Step 1 on elements of the tire–ground system:
-
wheel hub,
-
tire and its components,
-
tire–ground contact,
-
ground surface.
-
-
Step 3
Selection of those phenomena and properties of the tire–ground system which specifically pertain to the wheeled robots, and may be less relevant in case of the automobiles.
In the present work, we especially seek those tire model requirements which are different than requirements for the automotive tire models. Those requirements, unique for the tire models of mobile robots, can be the basis for evaluation of the existing tire models and as a result help identify weak spots and assess if the existing tire models satisfy the needs of the mobile robots or maybe some developments are necessary.
The reason for comparing the regular automobiles with the wheeled mobile robots follows from the fact that vast majority of the existing tire models was developed to satisfy requirements of the regular automobiles. Those tire models are readily available in the literature, and are used by researchers in the mobile robots community in simple simulation scenarios.
The scope of the analysis in this work is limited to the rigid grounds, and the focus is on the lightweight wheeled mobile robots.
3 Tire Modeling Background
In the present work the term “tire model” refers to a component of the multibody model of a full vehicle, which generates forces and moments of force in the assumed point of connection with the vehicle body (a wheel hub) depending on the operating conditions of the tire, including kinematic state of the tire and properties of the tire and the ground. This kind of “tire model” finds its application in studies of dynamics of a vehicle for the purpose of synthesis of a control system [7] or optimization of design [8].
The forces and moments of force, as well as principal kinematic quantities, typically studied in the vehicle dynamics, are listed below and shown in Fig. 1:
- α :
-
slip angle,
- γ :
-
camber angle,
- W F x :
-
longitudinal tire–ground reaction force,
- W F y :
-
lateral tire–ground reaction force,
- W F z :
-
normal tire–ground reaction force,
- W M x :
-
overturning moment,
- W M y :
-
rolling resistance moment,
- W M z :
-
(self-)aligning moment.

Tire coordinate systems
Conventionally, tire forces and moments of force depend on the kinematic state of the wheel expressed by slip ratio (or longitudinal slip) λ [2]:
and lateral slip tan(α):
where H v x and H v y —respectively, longitudinal and lateral components of velocity of the wheel center, r e —effective rolling radius, Ω—angular velocity of spin of the wheel.
In case of typical automotive tires, the dependency of longitudinal force W F x on slip ratio λ has the form depicted in Fig. 2. The curve can be characterized by its initial slope, called longitudinal slip stiffness, the value of peak force at a certain slip ratio of about 10–20 %, and the value of sliding force at 100 % slip ratio.

Example of force–slip ratio characteristic
It should be emphasized that only the slip ratio equal to 100 % describes the state of full sliding of the tire tread on the road surface, and slip ratios over 0 % and below 100 % (excluding the range limits) describe the situation where part of the tire contact patch does not slide on the road (i.e., adheres to the road), and the remaining part does slide. In particular, for the small slip ratios, of the order of a few percent, the sliding is negligible.
In case of typical automotive tires, the dependency of lateral force W F y on the slip angle α has similar (but not identical) nonlinear shape as the W F x (λ) dependency. Also in cases of simultaneous wheel driving/braking and turning, the shape of W F x (λ) dependency is strongly affected by the value of α, and the shape of the W F y (α) by the value of λ; this phenomenon is associated with limited tire–ground friction force and its distribution between W F x and W F y force components.
Modeling of tires for the purpose of automobile dynamics studies started in the first half of the twentieth century, and over the years resulted in several tens of automotive tire models from various authors. Many of those models are described in [2].
According to [9], the existing automotive tire models can be broadly classified into three–four categories shown in Fig. 3. The models are divided into categories according to growing complexity of formulation (e.g., number of model elements) and the frequency spectrum of input/output signals covered by the model.

Classification of the automotive tire models, following Ammon [9]
The first category is comprised of the models based on mathematical expressions which best fit the measurement results of real tires, e.g., a polynomial or the Pacejka model [10]. The second and third categories include models formulated based on the available knowledge of the tire, but they differ as to the complexity (analytical models). An example of the model from the second category is the Dugoff model [11], and from the third category the FTire model [12]. The fourth category comprises accurate finite element models, which, however, rarely can be used for vehicle dynamics studies due to the computational complexity. An example of this kind of model can be work [13].
4 Analysis of Differences Between Lightweight Wheeled Robots and Automobiles
In the present section discussion of differences between automobiles and lightweight wheeled mobile robots in the aspects which affect the tire–ground system is carried out, which comprises Step 1 of the analysis.
4.1 Tires
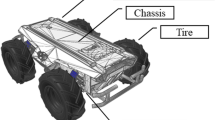
In Fig. 4 are shown examples of two types of tires used with the PIAP SCOUT lightweight robot produced in the Industrial Research Institute for Automation and Measurements PIAP [14]. Comparison of the most important mechanical design properties of robot tires with tires of other categories of vehicles is shown in Table 1. A reference custom-made robot tire (Fig. 4b), the automotive off-road tire (Fig. 5a), and the tractor tire (Fig. 5b) were chosen for comparison. The SUV tire and tractor tire were chosen because they have tread of relatively large depth.

Tires of the lightweight PIAP SCOUT wheeled mobile robot: a 2009 version, b 2014 version

It is evident that rubber tires of the lightweight robots have several times smaller unloaded diameter than the automotive/tractor tires. Robot tires are usually non-pneumatic, that is, they are not filled with the gas under pressure, but contain a foam insert (Figs. 6 and 7b). Also the rubber shell of the robot tires is often not reinforced, whereas the automotive/tractor tires contain carcass and belt made of materials different than rubber.

Cross section of a non-pneumatic tire of the type used in the lightweight wheeled mobile robots (source of the background image: Pro-Line racing [17])

Components of the robot wheel: a wheel hub, b foam insert (visible gaps after material samples cut out for testing)
In case when robot tires are equipped with block tread (usually they are, because block tread improves obstacle climbing capabilities), the ratio of the block tread depth to the tire unloaded radius (TD/UR) is usually greater than in SUV tires, but similar as in tractor tires.
It should be noted that various very diverse tread patterns can be used with robot tires, including patterns typical for passenger car tires, SUV tires, and agricultural tires.
In case of the robot tires interesting is also the asymmetric wheel hub (Fig. 7a), which is designed for tires with one sidewall of height smaller than another.
4.2 Environment
In case of automobiles their intended working environments are the outdoor environments, especially the engineered roads, hence their tires are optimized to operate on asphalt or concrete pavements.
Lightweight wheeled mobile robots can operate in various outdoor environments, in urban and natural scenarios, in the environmental conditions similar to the automobiles. Additionally, by advantage of their small size they can operate inside buildings, especially in the areas designed for people, like office spaces or industrial passages.
In Table 2 are listed some typical materials with which the rubber tire of a robot interacts by friction during normal operation.
In Table 3 are shown typical shapes of the ground encountered by a wheeled mobile robot during normal operation. The shape of the ground affects the conditions of contact between the tire and the ground surface. The lightweight mobile robots are often used for reconnaissance and inspection tasks, so they must be able to operate on a broad range of grounds. Steel gratings are commonly used in the industrial environments for catwalks and decks. Their contact configurations with tires having block tread can be especially complex. The “bumps” category may include, for example, curbstones and doorsteps. Sometimes a wheeled robot must operate on extremely irregular terrain like debris, however for this kind of terrain other means of locomotion like legs might be better suited.
Stairs deserve special attention because they are frequently encountered during robot inspection missions inside buildings, but are very uncommon for automobiles.
4.3 Vehicle Systems
Table 4 presents differences between cars and lightweight robots in the vehicle systems which affect tire–ground working conditions, i.e., suspension, steering, and power train.
Car suspension systems are typically equipped with springs and shock absorbers, which are not typical for the small robots. The small robots usually have suspensions with no damping capabilities. Often the axle is rigidly connected to the body without any possibility of travel.
There is a big difference in the suspended mass, which is 1–2 orders of magnitude larger in case of cars than in case of small robots. This translates to smaller vertical loads of wheels in case of small robots which are about 100 N per wheel, as compared to several thousand Newtons per wheel (about 2300 N in case of cars from the European Commission A-segment, e.g., Toyota Aygo, Fiat 500).
The steering systems of cars and robots differ in the number of steered wheels and the range of steering of the individual wheel.
In the case of lightweight wheeled robots the most popular steering principle at the moment is the differential steering, where turning is achieved by means of a difference of speeds of wheels at the left- and right-hand side of a vehicle. This kind of design allows individual wheels not to turn with respect to vehicle body (non-steered wheels). It also permits to achieve zero-radius turns, but is not energy efficient in case of multiple non-steered wheel designs due to inherent large wheel slip during turns.
Another possibility is the steering system typical for automobiles, i.e., Ackermann steering, where individual wheels turn in relatively narrow limits with respect to vehicle body depending on the desired radius of the turn. This design is rather rare in case of wheeled robots at the moment. Common solutions of this kind of steering do not allow zero turning radius.
The third possibility is all-wheel steering where individual wheels turn in wide limits with respect to vehicle body (e.g., ±90°). This design is popular in the planetary rovers, because it enables turning with zero turn radius, but is more energy efficient than differential steering with multiple wheels (skid-steering).
Lightweight wheeled mobile robots are commonly powered by DC electric motors (one motor per wheel is common), in contrast to internal combustion engines used in the automobiles (one engine per whole vehicle with distribution of mechanical power to driving wheels is common). The lightweight wheeled robots require relatively low power to drive and also range between refill of energy storage is not so critical as in case of cars, so it is possible to use electric motors only and fulfill the design requirements (this is usually not possible in case of cars). As a rule each driving wheel has its dedicated electric motor, so the drivetrain system of a robot requires much simpler mechanical design than that of a car.
4.4 Ways of Control
Table 5 compares ways of motion control of robots and automobiles. In the basic (traditional) mode, both robots and cars are controlled by a human, who commands the desired motion by means of appropriate human–machine interface, i.e., steering wheel and pedals in case of a car and elements of the control panel in case of a robot. The fundamental difference lies in the position of the human with respect to vehicle. In the case of mobile robots operator is not on-board of the vehicle, and sometimes cannot even directly observe the vehicle, but must issue commands based on picture from the onboard cameras. The absence of a human on-board has profound influence on robot design starting from applications (dangerous and tedious tasks), through size and mass, to suspension system and robot body design.
With advancement of technology, mobile robots are equipped with more and more complex control systems which make the work of a human operator easier in the semiautonomy mode (operator has to issue high level commands instead of manually setting motion of individual joints). From the point of view of cybernetics and robotics, the ultimate design goal is to reduce the need of human supervision and control of the robot to the minimum, so that robot can perform tasks autonomously, for example, search debris and maybe rescue casualties by itself or call the rescue team to help if necessary.
By having no people on-board and without need of human participation in the low-level control loop, the better performance of control can be achieved, increasing speed and accuracy of maneuvers performed by the robot to the level restricted by machine limitations rather than by human perception or motor skills.
4.5 Maneuvers
In Table 6 are summarized basic maneuvers that can be performed by automobiles and wheeled robots. Possibility of realization of a particular maneuver depends on design of the steering system of a vehicle, exclusive of the last maneuver listed in the table which is strictly associated with overall design and application of the robot.
Maneuvers are commanded or initiated by the operator (the driver), or by a vehicle itself in case of autonomous vehicles.
Crabbing is the kind of straight-line motion that takes place not in the longitudinal direction of a vehicle—it requires turning all wheels through the same angle, in particular by 90°, and is possible only when the vehicle is equipped with the all-wheel steering system. This kind of maneuver is generally not implemented in the contemporary automobiles, but it is usually present in planetary rovers.
Ackermann turns are typical for automobiles and are characterized by turning radius greater than zero—in practical applications greater than certain minimum turning radius depending on the steering system design and vehicle wheelbase.
A 90° turn is typical for wheeled robots which have the differential steering system. This kind of turn is characterized by a very small turning radius (close to zero, because sideways skid of the wheels is possible).
The single one maneuver which differentiates automobiles (Ackermann steering) from wheeled robots (differential or all-wheel steering) is the turn with zero radius (or the pivot turn).
The last-mentioned maneuver, that is hand throw, concerns a robot particularly designed to allow such action and to withstand the associated conditions [14]. The human operator picks up the robot using the handle on the side of the robot body and rotates himself to pass velocity to the robot, then releases it (this can be seen, e.g., in the movie [20] at 5:26 min.). The robot rotates during flight and then hits the ground, usually with one of the wheels. Another example of maneuver from this category is 1–8 m high jump performed by the Sand Flea robot of Boston Dynamics using an integrated piston actuator and onboard fuel supply [21]. Jump trajectory can be precisely controlled by changeable initial conditions and stabilization during the flight phase.
4.6 Allowable Extreme Vehicle Body Motions
During operation in real conditions, vehicle body may be subjected to large roll and pitch angles, and also tire impacts with the ground.
Table 7 gives some examples of the situations, where vehicle body undergoes high to extreme roll and pitch rotation.
In case of regular straight-line motion with significant speed on hilly terrain, a condition may occur when the automobile hops (looses contact of wheels with the ground), flies for a very short period of time after which wheels come to contact with the ground again. During short period of the flight, the vehicle center of mass moves along a parabolic path, and angles describing orientation of the body change only by small values. This condition is generally allowable by all automobile designs and most robots.
In case when the jump has higher profile and lasts longer, vehicle body orientation may change significantly during the phase of flight resulting in impact which is damaging to the vehicle body. This situation can be sometimes seen during automobile rally championships, where the vehicle is seriously damaged after ground impact.
In case of lightweight inspection wheeled mobile robots, like already mentioned PIAP SCOUT [14], the robot body by design may undergo large roll and pitch rotations without damage—for example, the ground impact after being thrown by the operator described earlier.
Particularly interesting is robot immunity to rollover condition, that is, the robot body can rotate upside down about roll axis, and continue motion with no influence on its health.
5 Requirements for Tire Models of the Lightweight Wheeled Mobile Robots
The presented differences between automobiles and lightweight wheeled mobile robots influence the vehicle tire–ground system in certain ways, which are not described here in detail due to space limitations. Below are presented only those findings of the analysis which are particular to the wheeled robots, especially lightweight wheeled robots. Those findings regarding tire–ground system which are common for wheeled robots and automobiles are not mentioned. The findings are formulated in the form of requirements concerning modeling and identification of the tire–ground system.
One should note that in order to fully take advantage of the benefits offered by vehicle dynamics simulation of wheeled robots, a comprehensive tire model should satisfy the requirements formulated in the present section and summarized in Table 8.
5.1 Wheel Hub Kinematics
Requirement 1. The tire model should be accurate in the conditions of large slip angles α (about 45°) and combined slip.
This requirement must be satisfied when the wheeled robot is skid-steered. In this case, during pivot turns, the robot wheel moves with approximately constant slip angle, whose value depends on robot chassis geometry, so it is a design constant. In many skid-steered robot designs the value of the angle α (Fig. 8) is about 45°. Robot tires work in the conditions of this slip angle during every pivot turn, so this is the frequently occurring condition. In contrast, automobile tires usually move with slip angles below 25°, and only occasionally reach higher values of slip angles [9]. It should be also emphasized that tires of skid-steered wheeled robots during turning always move in the condition of combined slip, that is, simultaneous longitudinal slip and lateral slip.

Slip angle α of a skid-steered wheeled robot during pivot turn
Requirement 2. More emphasis should be put on nonlinear regions of force–slip (moment–slip) dependencies on the rigid grounds. This requirement follows from the fact that robot automatic controllers are able to utilize the friction potential existing on the ground to a larger extent than the human driver does. Realization of time-critical tasks will lead to necessity of taking advantage of the peak friction forces and possibly to explore opportunities offered by agility dynamics (controlled sliding) of the kind described in the work [22].
5.2 Tire-Ground Contact
Requirement 3. Effects of large circumferential curvature of a small-size tire should be considered in the tire model.
With small tire radius, the curvature of the tire shell is relatively large, as compared with automotive tires. The large tire curvature affects the tire–ground contact conditions, the contact area being generally smaller. This leads to a situation where tire–ground contact on a rigid ground may reduce to a single tread block contact.
Requirement 4. Contact of tire with rigid ground should be modeled also on tire shoulder and tire sidewall.
Typically, the contact of tire with rigid grounds is restricted to the tread area. However, in case of lightweight wheeled robots without manipulator a situation of body rollover is a normal operating condition, allowed by design. Because tires are the most protruded elements of the robot body, during vehicle rollover the contact between tire and the ground occurs on the tread area, on tire shoulder and on tire sidewall.
5.3 Ground Surfaces
Requirement 5. Frictional interaction of rubber tire with ground surfaces typical for lightweight wheeled robots and nontypical for automobiles should be considered.
A range of ground surfaces on which the robot usually moves, which are however not typical for automobile tires, can be indicated as in Table 2. This statement is especially true for ground surfaces found in spaces dedicated for humans, like offices. The parameters describing tire interaction with those surfaces like maximum and sliding friction coefficient, peak and sliding adhesion coefficient, coefficient of rolling resistance are usually not available in the literature.
5.4 Tire Structure Design
Requirement 6. Heights of tire sidewalls should be considered in tire modeling.
Heights of tire sidewalls, together with tire width, are the basic geometric parameters which determine the shape of tire cross section. With known material properties of the tire structure including shell and internal filling, the cross-sectional shape determines tire stiffness and damping. Tire stiffness belongs to the key factors which influence the vehicle dynamics of automobiles. It should be emphasized, that in case of lightweight wheeled robot tires, the height of one sidewall can be different than the height of another one (Fig.7).
Requirement 7. Nontypical tire filling should be considered in tire model.
Tire filling with foam inserts instead of typical gas under pressure, creates different conditions for tire structure deformation under load than in case of pneumatic tires. The influence of this nontypical tire structure on generated forces and moments of force should be analyzed in detail.
5.5 Tread Design
Requirement 8. Mass and flexibility of individual tire tread blocks should be included in the tire model.
It is evident that relative depth of the tread blocks of the robot tires is greater than relative depth of tread blocks of automotive tire (Table 1). Individual tread blocks flexibility may influence the force and moment generated by the tire. This effect should be included in tire modeling and its importance should be investigated. Because of significant volume of tread blocks, the effect of masses of individual tread blocks on tire vibrations should be considered as well.
Requirement 9. Tread pattern and shapes of individual tread blocks should be included in the tire model.
Tire tread should be modeled at high level of detail in order to enable contact with ground surface not only on the external faces of tread blocks, but also on tread block side area. The geometry of individual tread blocks and their layout on the tire (i.e., tread pattern) should be modeled. Satisfaction of this requirement is necessary to adequately model robot tire interaction with various non-smooth, non-flat ground surfaces like stair steps or deck gratings, where gear interaction of tread with ground plays major role besides friction (Fig. 9).

Example of interaction of tire tread block with rigid obstacle—the tread block contacts obstacle with its side surface
5.6 Required Empirical Data
There is a deficiency of empirical data characterizing the small tires form the point of view of vehicle dynamics. In order to carry out identification and verification/validation of tire models one would like to have at least the following dependencies describing tire forces and moments:
-
normal force on normal tire deformation,
-
longitudinal force on longitudinal tire deformation,
-
lateral force on lateral tire deformation,
-
longitudinal force on longitudinal slip (on various ground surfaces, especially indoor surfaces) including influence of the lateral slip (combined slip case),
-
lateral force on lateral slip, including influence of the longitudinal slip (combined slip case).
Attempts to obtain parameters of small robotic tires on the basis of automotive tire data using the scaling method were made for tire rotational stiffness and damping by one of the authors [23], where the conclusion was that the method of scaling may not be the most appropriate for such tires.
6 Conclusion
A comparative analysis of properties of lightweight wheeled mobile robots and automobiles from the point of view of their influence on the tire–ground system was carried out. The differences found were the basis for formulation of requirements that tire models of wheeled robots must satisfy in order to get the most of the wheeled robot dynamics studies by means of computer simulation.
The existing tire models, developed for the needs of the automotive industry, should be tested against those requirements to find out if they are suitable for mobile robot dynamics analysis. Research like that is planned by the authors.
Verification and validation of the tire models is not possible without empirical data of the real tire. Gathering of required empirical data concerning robot tires is planned by the authors.
References
SPARC: Strategic Research Agenda For Robotics in Europe. 2014–2020. http://www.eu-robotics.net/cms/upload/PPP/SRA2020_SPARC.pdf
Pacejka, H.B.: Tire and Vehicle Dynamics. Elsevier, New York (2012)
Ray, L.R., Brande, D.C., Lever, J.H.: Estimation of net traction for differential-steered wheeled robots. J. Terramech. 46, 75–87 (2009)
Kobayashi, T., Fujiwara, Y., Yamakawa, J., Yasufuku, N., Omine, K.: Mobility performance of a rigid wheel in low gravity environments. J Terramech. 47, 261–274 (2010)
Heverly, M., Matthews, J., Lin, J., Fuller, D., Maimone, M., Biesiadecki, J., Leichty, J.: Traverse performance characterization for the Mars Science Laboratory rover. J. Field Robotics. 30, 835–846 (2013)
Proteus—Integrated mobile system for supporting anti-terrorist and crisis management operations. http://www.projektproteus.pl/en/
Hendzel, Z., Trojnacki, M.: Neural network control of a four-wheeled mobile robot subject to wheel slip. In: Awrejcewicz, J., Szewczyk, R., Trojnacki, M., Kaliczyńska, M. (eds.) Mechatronics—Ideas for Industrial Applications, pp. 187–201. Springer International Publishing, Cham (2015)
Zboiński, M., Trojnacki, M.: Motion modeling and simulation of small robot for reconnaissance using MD Adams software (in Polish: Modelowanie i symulacja ruchu małego robota do rozpoznania terenu z zastosowaniem oprogramowania MD Adams). Pomiary Automatyka Robotyka 15(2), 454–461 (2011)
Ammon, D.: Vehicle dynamics analysis tasks and related tyre simulation challenges. Vehicle Syst. Dyn. 43, 30–47 (2005)
Bakker, E., Nyborg, L., Pacejka, H.B.: Tyre Modelling for Use in Vehicle Dynamics Studies. SAE International, Warrendale (1987)
Dugoff, H.: Tire performance characteristics affecting vehicle response to steering and braking control inputs. Final Report (1969)
Gipser, M.: FTire—the tire simulation model for all applications related to vehicle dynamics. Veh. Syst. Dyn. 45, 139–151 (2007)
Wilk, Ł., Trojnacki, M., Dąbek, P., Cader, M.: Modeling of non-typical tire of Scout mobile robot using CAx systems (in Polish). Mechanik 1–8 (2014)
PIAP SCOUT mobile robot, EOD equipment, EOD robot, surveillance robot. http://www.antiterrorism.eu/product/en/scout
Toyo Tires: Open Country M/T. http://toyotires.com/tire/pattern/open-country-mt-off-road-maximum-traction-tires?cat=10
MICHELIN AgriBib tire: the standard size tire for all North American tractor applications. www.michelinag.com/Agricultural-tires/Tractors/MICHELIN-AGRIBIB
Pro-Line Racing|Most-winning RC parts and accessories!|RC Parts, Traxxas Parts, RC Crawler, RC Wheels, RC Tires, RC Bodies. http://www.prolineracing.com/
PREMIUM GRATING—Professional Steel Grating Manufacturer. http://www.premiumgrating.com/
New Cars, Used Cars, Hybrid Cars, Small Cars|Toyota UK. https://www.toyota.co.uk/
PIAP Scout promotional movie (in Polish). www.youtube.com/watch?v=GIktOv0gqWk
Boston Dynamics: Dedicated to the Science and Art of How Things Move. http://www.bostondynamics.com/robot_sandflea.html
Yi, J., Li, J., Lu, J., Liu, Z.: On the Stability and Agility of Aggressive Vehicle Maneuvers: A Pendulum-Turn Maneuver Example. IEEE Trans. Control Syst. Technol. 20, 663–676 (2012)
Dąbek, P., Szosland, A.: Identification of rotational properties of a non-pneumatic tyre of a mobile robot (in Polish: Identyfikacja parametrów skrętnych opony niepneumatycznej robota mobilnego). Pomiary Automatyka Robotyka 15(2), 495–503 (2011)
Acknowledgments
The work has been realized as a part of the project entitled “Dynamics modeling of four-wheeled mobile robot and tracking control of its motion with limitation of wheels slip.” The project is financed from the means of National Science Centre of Poland granted on the basis of decision number DEC-2011/03/B/ST7/02532.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 Springer International Publishing Switzerland
About this paper
Cite this paper
Dąbek, P., Trojnacki, M. (2016). Requirements for Tire Models of the Lightweight Wheeled Mobile Robots. In: Awrejcewicz, J., Kaliński, K., Szewczyk, R., Kaliczyńska, M. (eds) Mechatronics: Ideas, Challenges, Solutions and Applications. Advances in Intelligent Systems and Computing, vol 414. Springer, Cham. https://doi.org/10.1007/978-3-319-26886-6_3
Download citation
DOI: https://doi.org/10.1007/978-3-319-26886-6_3
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-26885-9
Online ISBN: 978-3-319-26886-6
eBook Packages: EngineeringEngineering (R0)