
Abstract
In the paper the analysis of e-call system informing about accidents in land transport with application of public standards GSM and GPS is shown. Based on Markov processes the two models are introduced: reliability model for hardware and behavioral model describing man-system co-operation (including level of equipment and environmental conditions together with weather). The reliability and maintenance parameters correspond to typical reliability characteristics of GPS/GSM devices and time characteristics related to service, monitoring and management of critical events using such devices. Presented results (probabilistic and time) may be also adapted to another applications such mountain tourism and extreme sports, but even in railway transport with GPS positioning in the regional lines (without typical centralized railway control infrastructure).
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
One of the elements of the use of modern telematics solutions in land transport is among other thing improvement the functionality and increasing the safety level. The influence of new solutions is a part of the safety studies in transport [5], including driver behavior [8, 9]. Modern ICT (Information and Communication Technologies) solutions take information from sensors and cameras and allow for safer movement of objects (cars, trains, boats). In addition, in the event of an incident (a road traffic collision, capsizing the boat) allows to faster their localization and sending the appropriate emergency services. One of the priorities, when it comes to road transport, is to build an appropriate infrastructure to receive reports of traffic accidents (ang. Public Safety Answering Point - PSAP).In Poland the function of PSAP fulfil the Rescue Notification Center “112” (pol. CPR).Such projects are part of the European Commission’s strategy, and its part is e-Call system. The paper presents an analysis of the notification system about an accident in land transport, using GSM and GPS standard. Information about the location of the transport object with a number of passengers at the time of the dangerous event (immediately life-threatening) getting from the GPS together with additional data is transmitted to the monitoring center on the GSM connection. For cars it is the extension of the e-Call system, but similar system is proposed to the yachts on inland waters [4, 5]. It is the authors’ original concept, designed to show how the combination of this type of equipment can significantly improve safety. In the rail transport such solution is based on GSM-R, [2, 3]. In this case GSM-R cooperate with typical identification train devices (for example – balise, insulate rail section). In order to determine probability, characterizing safety of such type of the notification systems (with respect to devices used in the proposed system), authors applied the analysis of stochastic processes. These processes describe the events, also critical, connected with mobility of objects (vehicles, boats, etc.) in different conditions. On the basis of Markov processes the models were proposed: reliability model for electronic devices, and exploitation model for system including an influence of a man. The second model takes into consideration a degree equipment object in system, but also the typical environmental conditions, including weather. Reliability and exploitation data are based on typical reliabilities characteristics of popular devices GPS/GSM and temporal characteristics connected with services, monitoring and crisis management using such ICT systems. The results (probabilistic and time) can be adapted to other uses, mountaineering and extreme sports, but also in rail transport that can make use of GPS positioning on regional lines (usually such lines are not equipped with centralized rail control systems) [7].
2 E-Call System
E-Call is designed first of all to improve the effectiveness of emergency services. In its own assumption it can to contribute to a reduction in the number of victims and to alleviate ailment of injuries sustained during road accidents. E-Call system was developed based on a three-dimensional approach [1]. The system consists of: the system of in- vehicle, communication network (GSM) and points PSAP. Diagram of the system is shown in Fig. 1.

Scheme of e-Call system [own study]
In motor vehicles e-Call system consists of GSM /GPS. Currently in Poland it is possible to make a call to the emergency number “112” without having registered and active GSM module SIM card. Thus, even foreign vehicles that have the module can use the emergency notification system. System module can be integrated with the airbag in the car. In the event of a traffic incident, shot in a car airbag module initiates the connection e-Call. The basic idea of the system is shown in Fig. 2.

In case of car accident to the emergency call center is transmitted information about the event and location data. During the call, the operator will try to talk to the victims in order to obtain the details of the event. In the absence of GPS signal, vehicle position is determined on the basis of data from the GSM base station (BTS). In this case, the discrepancy between the actual locations can be up to several hundred meters. In the case of built-up area it may be a few streets away. In addition, in the vehicle is installed emergency button for manual notifications (e.g. we are witnessed the incident). Due to the lack of full coverage of the GSM network in Poland, may be a situation in which there will not be possible to notify the rescue services about incident.
3 Emergency Notification System for Tourists Yachts
Another solution based at telematics systems is proposed by the authors [4, 5], emergency notification system about dangerous incident in inland waters. Proposed system is similar to the e-Call system (systemis at the stage of building a prototype) and will be equipped in GSM and GPS modules. The system also based atthree-dimensional approach: the system-board (modules GPS /GSM), the GSM network, and center of emergency services (pol. Aquatic Volunteer Emergency Corps). In the case of an event (capsizing the boat) tilt sensor installed in the system will activate the module and will send the sms with the appropriate information and geographical location. In the absence of actual GPS position, the system will read the last saved position (buffer - last 15 min.). System diagram is shown in Fig. 3.

Scheme of proposed ENoS [own study]
4 Markov Models
There is a group of physical phenomena, which owing to their complexity there is no possible description of deterministic. Carrying out in the same test conditions give different results. In such cases, we are dealing with random phenomena. To the group of these phenomena includes all kinds of events on the road or on the waters. Hence the authors decided to use Markov processes, which are one of the ways of safety analysis. Random process {Xt} is called a Markov process, if, for each time t0 the probability of any position in the future (t > t0) depends only on the position at time t = t0 and does not depend on the course of the past. Because the proposed to the safety analysis models have countable states, and it is possible to accidentally move between them, thus we have deal with the process with discrete states. For the analysis assumed stationary, ergodic and homogeneous character of Markov processes. Figure 4 shows the model of the system with respect to the transmission of GPS and GSM. The proposed model is a tool for analysis of the solutions presented in Sects. 2 and 3. The model assumes that the most undesirable state is 1 and 3. It was assumed, that in states 1 and 3 is not possible to send any messages concerned event due to lack of GSM network, and also position based at GPS. In the event of such a situation, the rescue services will be informed by the victims or by accidental witnesses. Due to lost a GSM connection it is possible, that in many places the time of waiting for help may take longer (up to several hours).

Markov model for GPS/GSM [own study]
where:
-
λ- failure rate of electronic devices (both GSM and GPS),
-
λ1, λ2 - intensity of disappearance of GSM and GPS signals,
-
µ- repair rate of electronic devices,
-
µ1,µ2 - intensity of service in GSM and GPS,
In the model from Fig. 4 we can distinguish the following states:
-
0 –state of safety. In the event of danger situation system is correctly working and sending the messages.
-
1 –no GSM signal.
-
2 –no GPS signal.
-
3 –no GPS and GSM signal.
We can also ascribe, for model from Fig. 4, transition matrix:
where \( 0 \le p_{jk} \le 1 \), and \( \sum\limits_{k = 1}^{j} {p_{jk} = 1} \) j,k = 1,2, …, n.
In order to solve the equations used mathematical apparatus in the form of operator equations (Laplace equation), and also computer aided - the Mathematica software. The window of the analysis is shown in Fig. 5.

The window of analysis [own study]
To calculate the values, the parameters were assumed: λ1 = 0,000114, λ2 = 0,000114, λ = 0.0001 h−1, µ = 1/t1 = 0, 1 h−1, µ1 = 1/t1 = 2 h−1, µ2 = 1/t2 = 2 h−1. Based at assumption, the estimated value of safety S is equal:
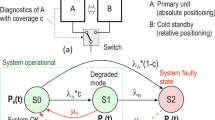
Figure 6 shows the model takes into consideration the addition reactions of the emergency services.

Markov model for vehicles/yachts with notification system [own study]
In the model form Fig. 6 we can distinguish:
-
0 –state of correct work. System is working,
-
1 –state of danger. Vehicle/yacht equipped with system,
-
2 –state of danger. Vehicle/yacht not equipped with system,
-
11 –no GPS signal,
-
12 –no GSM signal,
-
p – the probability of equipment vehicles/yachts in the system.
To calculate the safety value, the parameters were assumed:
-
λ – one hundred dangerous accidents/year.
-
λ1 – no GPS - 1 h/y.
-
λ2 – no GSM- 1 h/y.
-
λ3 – intensity 60/1 h
-
µ1 = 1/t1, t1 –after 30 min. emergency service arrives (in spite of GPS defects, system sends the position on the basis of BTS. The rescue services need additionally 10 min. due to lack the information about correct position).
-
µ2 = 1/t2, t3 – after 20 min. arrive the emergency service,
-
µ3 = 1/t3, t3 – after 2 h arrive the emergency service.
The model assumes that the most dangerous state is 2 and 12 (there is no possibility to send information about accident). To calculate the value of safety S, the probabilities P2 and P12 were estimated:
According to the formula (3) and (4) the analysis of safety depending on the percentage of the equipment of vehicles/yachts in the system, is shown in the Table 1.
The results presented in the Table 1 show, that the equipment of vehicles/boats in automatic notification system increase safety. Figure 7 shows the number of critical events per 10 000 occurred, depending on the percentage fitment of the system.

Number of critical events in 10000 of all events as a function of the equipment in the system [own study]
Lack notification system causes, that in 10000 events with 10 % participation vehicles with installed system there are average 98 critical events, and with 80 % participation there are only 22 critical events.
5 Conclusion
Systems described in the paper can speeds up time of reaction emergency services in case of event, thus in this way have an influence on reducing the number of victims. Analysis of safety rate introduced in the paper shows, how the probability of a critical events depends on the equipment of vehicles (yachts), but also on the timing related to the availability of GPS and GSM. In the case of e-Call, system is already used in many countries. Currently in Poland points CPR “112” are already prepared to receive information in the form of sms. The CPR Radom in 2014 registered only two such application, but with increase the number of devices installed in vehicles, such application may be more. Thanks to telematics solutions, additionally information about the incidents and traffic jams may be transferred to road managers. This may cause changes in the organization of movement, but the movement will be continual, [6]. Should also be taken into consideration reduction the probability of secondary accidents. In the case of the concept of the system described in Sect. 2, such solutions are not yet applied in inland water. The system is in the process of construction and verification. In this solutions type, the problem can be absence in many places GSM network. Therefore, suggested in Sect. 3 Markov models reflect the typical behaviour of the system (no signals, failures). On the basis of proposed models the safety analysis has been done. The analysis allows for estimate the numerical values of safety, and to determine an influence of the system on the quantity of critical events. Analysis shows, that with the increase of installed systems significantly decreases the number of critical events.
References
COM/2013/0315. Decision of the European Parliament and of the Council on the Deployment of the Interoperable EU-wide e-Call
Lewiński, A., Łukasik, Z., Perzyński, T., Ukleja, P.: The future generation of railway control systems for regional lines including new telematic solutions. In: Mikulski, J. (ed.) Telematics in the Transport Environment, CCIS 471, pp. 13–17. Springer, Heidelberg (2014)
Lewiński, A., Perzyński, T.: The analysis of electronics railway control and management systems with computers AID. In: Infraszyn 2014’, pp. 125–139. (in Polish)
Łukasik, Z., Perzyński, T.: Telematics systems to aid of safety in water inland turists. In: Mikulski, J. (ed.) Telematics in the Transport Environment CCIS 395, pp. 89–96. Springer, Heidelberg (2013)
Perzyński, T.: The application of new technologies in management, logistics and safety in water tourism and recreation. In: LOGISTYKA nr. 3/2014, CD pp. 1231–5478. (in Polish)
Perzyński, T.: Telematics in management of city transport. In: LOGISTYKA nr. 3/2014, CD pp. 5030–5035. (in Polish)
Perzyński, T., Ukleja, P.: Contemporary railway control and management systems. In: Solutions, Safety, Logistic. LOGISTYKA nr. 6/2014, CD pp. 8542–8547. (in Polish)
Sumiła, M., Siergiejczyk, M.: Method of dynamic identification of hazardous driver behavior by traffic parameters detection. In: Nowakowski, A.F., et al. (eds.) Safety and Reliability Methodology and Applications, pp. 109–114. CRC Press Taylor & Francis Group, London (2015). ISBN 978-1-138-02681-0
Sumiła, M.: Evaluation of the drivers’ distraction caused by dashboard MMI interface. In: Mikulski, J. (ed.) Telematics in the Transport Environment CCIS 471, pp. 396–403. Springer, Heidelberg (2012)
Crash test prověřil e-Call. www.motorinfo.cz. Accessed on 2nd December 2015
CAN communication and e-Call. www.can-cia.org. Accessed on 2nd December 2015
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2015 Springer International Publishing Switzerland
About this paper
Cite this paper
Perzyński, T., Lewiński, A., Łukasik, Z. (2015). Safety Analysis of Accidents Call System Especially Related to In-Land Water Transport Based on New Telematic Solutions. In: Mikulski, J. (eds) Tools of Transport Telematics. TST 2015. Communications in Computer and Information Science, vol 531. Springer, Cham. https://doi.org/10.1007/978-3-319-24577-5_9
Download citation
DOI: https://doi.org/10.1007/978-3-319-24577-5_9
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-24576-8
Online ISBN: 978-3-319-24577-5
eBook Packages: Computer ScienceComputer Science (R0)