
Abstract
Satellite and ground-based interferometric radars have the potential to measure the displacement of active rockslides. Data describing the spatial- and temporal displacement patterns of a rockslide are essential contributions to the total understanding of a rockslide. A better overview of the kinematics will in turn improve the quality of a risk assessment. In this study we have processed TerraSAR-X satellite data, collected since 2009, from both ascending and descending satellite tracks together with ground-based interferometric radar observations of an active rockslide in Northern Norway. Findings show that both the satellite and the ground-based data delimit the active rockslide area and that the displacement rates are highest in the upper part of the rockslide. In the lower parts of the rockslide, the displacement pattern shows a possible compressional toe-zone together with a fast moving lobate shaped landform.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction and Motivation
Rockslides have a high socioeconomic and environmental importance in many countries. Norway is particularly susceptible to rockslides due to its steep mountains, and it is therefore very important to identify and monitor potential unstable rock slopes. The Lyngen region in Troms County has an unusually high density of large unstable rock slopes (Blikra et al. 2006; Osmundsen et al. 2009). In this study, we take the example of an unstable rock slope referred to as “Gamanjunni3.” (Bunkholt et al. 2011).
In order to fully understand the kinematics and geometric configurations susceptible for sliding, it is imperative to obtain precise measurements of deformation taking place in potential unstable rock slopes. Geodetic techniques, such as the use of Global Navigation Satellite Systems (GNSS) monuments, laser total stations and precise leveling, produce sparse networks of measurements. The cost of establishing such networks can be high, and they are often surveyed infrequently due to expensive infrastructure and logistics.
Long-term deformation mapping using space borne Synthetic Aperture Radar (SAR) interferometry (InSAR) makes it possible to detect both spatial and temporal displacement patterns related to rockslides (Lauknes et al. 2010; Henderson et al. 2011; Lauknes 2011).
By using an in situ ground-based radar imaging system, most of these limitations can be overcome. Ground-based systems can be installed to optimize imaging geometry, increasing sensitivity to deformation along the line-of-sight (LOS). The shorter wavelength also provides higher sensitivity to motion. Ground-based interferometric radar systems are complementary to spaceborne InSAR because data can be acquired continuously in order to track rapid deformation and mitigate the effects of temporal decorrelation and atmospheric phase variability.
2 Study Area
The Gamanjunni3 rockslide is situated on the west-facing valley side of Manndalen, in Troms County in Northern Norway. This locality is under investigation by the Geological Survey of Norway and preliminary calculations suggest a maximum collapse volume of 3.8 Mm3 (Henderson et al. 2010). The upper part of the Gamanjunni3 consists of a block, ~300 m in north direction, ~200 m in east direction and ~200 m in vertical direction that has moved down an approximately 40 degree sliding plane. Horizontal displacement is 120 m and vertical displacement is 100 m. The overall morphology resembles a complex slide with large moving intact blocks, fast moving talus lobes, ridges, anti-ridges, benches and more intact bedrock with congruent cracks opening.
3 Methods and Available Data
TLS LiDAR investigations (Bunkholt et al. 2011) have revealed eight different sets of discontinuities in addition to the foliation. The most important structures controlling the wedge-formed geometry are the back-scarp and the south-east-bounding lateral release surface.
We have processed displacement data from three different LOS directions (Fig. 33.1). TerraSAR-X satellite stripmap data in both ascending and descending geometries over the Lyngen area has been collected since 2009. This radar operates at X-band (9.6 GHz). The satellite has a repeat cycle of 11 days. Images have been collected during the snow-free season.

Location of Gamanjunni3 rockslide with Line of Sight (LOS) of the available radar datasets
During six weeks in July and August 2012 we observed the Gamanjunni3 rockslide using the GPRI (Gamma Portable Radar Interferometer) instrument developed by Gamma Remote Sensing AG (Werner et al. 2008, 2009). This instrument operates at Ku-band (17.2 GHz) and has measurement sensitivity better than 1 mm. The radar data were acquired with a temporal sampling as often as every three minutes. All satellite data have been processed using a Persistent Scatterer Interferometry (PSI) algorithm implemented in the GSAR software package (Larsen et al. 2006).
4 Results and Discussion
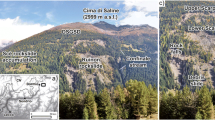
Figure 33.2 illustrates some of the results we have obtained. Figure 33.2a shows the area of the rockslide. Figure 33.2b shows the LOS deformation calculated from a single, 21-day interferogram generated from the GPRI data. Negative displacements (red) are towards the instrument. Figure 33.2c shows the average LOS velocity over four years calculated from the ascending TerraSAR-X data. Figure 33.2d shows the average LOS velocity over four years calculated from the descending TerraSAR-X data. For the satellite data, negative values are away from the satellite. The area of movement is clearly defined in all three datasets.

Gamanjunni3 rockslide. a Area of the rockslide. b GPRI data from 21-day interferogram. Red 25 mm towards radar. Blue 15 mm away from radar. c Mean descending TerraSAR-X data (2009–2012). Red 9,5 mm/y away from radar. Blue 16 mm/y towards radar. d Mean descending TerraSAR-X data (2009-2012) Purple 68,5 mm/y towards radar. Blue 8 mm/y away from radar
The displacement maps produced from the satellite and ground-based interferometric radar data (Fig. 33.2b–d) delimit the active rockslide area observed in the field and from orthophoto. The displacement rates are highest in the upper part of the slide confirming field observations. In the bottom part the data show patterns that can originate from a toe-zone. The lower part of the slide contains a fast moving lobate shaped landform, visible in the high velocity area in (Fig. 33.2b). It has the characteristics of a rock glacier with steep front and a rough surface with large blocks floating on top.
5 Summary and Conclusions
Satellite interferometric synthetic aperture radar (InSAR) data is very useful for detecting, characterizing, and quantifying the stability of large rockslides. In particular, high-resolution spaceborne SAR systems such as RADARSAT-2 and TerraSAR-X are well suited for monitoring displacements at fine spatial and temporal scale. However, spaceborne InSAR systems are constrained by the specific SAR imaging geometry and relatively long revisit times. In the future we will be able to compute the absolute movement directions in the areas of overlap by combining the data from all sensors along the various LOS. This will reveal even more details about the displacement patterns and kinematics of moving areas.
The next step will be to combine all datasets to find the total displacement vector. With the help of geometry, the horizontal and vertical displacement components together with the direction of the total displacement vector can be found.
References
Blikra LH, Longva O, Braathen A, Anda E, Dehls JF, Stalsberg K (2006) Rock slope failures in Norwegian Fjord areas: examples, spatial distribution and temporal pattern. In: Evans S, Mugnozza G, Strom A, Hermanns R (eds) Landslides from massive rock slope failure, vol 49. Springer, The Netherlands, pp 475–496
Bunkholt H, Osmundsen PT, Redfield T, Oppikofer T, Eiken T, L’Heureux J-S, Hermanns R, Lauknes TR (2011) ROS fjellskred i Troms: status og analyser etter feltarbeid 2010: NGU Rapport 2011.031, p 135
Henderson IHC, Osmundsen PT, Redfield T (2010) ROS Fjellskred i Troms: status og planer 2010: NGU Rapport 2010.021
Henderson IHC, Lauknes TR, Osmundsen PT, Dehls J, Larsen Y, Redfield TF (2011) A structural, geomorphological and InSAR study of an active rock slope failure development, vol 351. Geological Society, London (Special Publications)
Lauknes TR, Piyush Shanker A, Dehls JF, Zebker HA, Henderson IHC, Larsen Y (2010) Detailed rockslide mapping in northern Norway with small baseline and persistent scatterer interferometric SAR time series methods. Remote Sens Environ 114(9):2097–2109
Lauknes TR (2011) Rockslide mapping in Norway by means of interferometric SAR time series analysis. PhD dissertation, University of Tromsø, p 124
Larsen Y, Engen G, Lauknes TR, Malnes E, Høgda KA (2006) A generic differential interferometric SAR processing system, with applications to land subsidence and snow-water equivalent retrieval. In: Fringe 2005 Workshop, vol 610, p 56)
Osmundsen PT, Henderson IHC, Lauknes TR, Larsen Y, Redfield TF, Dehls J (2009) Active normal fault control on landscape and rock-slope failure in northern Norway. Geol Soc America 37:135–138
Werner C, Wiesmann A, Strozzi T, Wegmüller U (2008) Gamma’s portable radar interferometer. In: Proceedings on 13th FIG international symposium deformation measurements and analysis, 4th IAG Symposium Geodesy Geotechnology Structuring Engineering, Lisbon, 372 Portugal, May 12–15
Werner C, Strozzi T, Wegmüller U, Wiesmann A (2009) A real-aperture radar for groundbased differential interferometry. In: Proceedings of the IGARSS, Boston, MA, 6–11 July 2009
Acknowledgements
The first three years of TerraSAR-X data were provided through the German Aerospace Centre (DLR) TerraSAR-X AO projects #GEO0565 and GEO0764. This work was supported in part by the Geological Survey of Norway, by the Norwegian Space Centre, and by the Regional Research Fund for Northern Norway.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2015 Springer International Publishing Switzerland
About this paper
Cite this paper
Eriksen, H.Ø., Lauknes, T.R., Larsen, Y., Dehls, J.F., Grydeland, T., Bunkholt, H. (2015). Satellite and Ground-Based Interferometric Radar Observations of an Active Rockslide in Northern Norway. In: Lollino, G., Manconi, A., Guzzetti, F., Culshaw, M., Bobrowsky, P., Luino, F. (eds) Engineering Geology for Society and Territory - Volume 5. Springer, Cham. https://doi.org/10.1007/978-3-319-09048-1_33
Download citation
DOI: https://doi.org/10.1007/978-3-319-09048-1_33
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-09047-4
Online ISBN: 978-3-319-09048-1
eBook Packages: Earth and Environmental ScienceEarth and Environmental Science (R0)