
Abstract
The paper presents a robust nonlinear output feedback control system for the attitude control of satellites, with unstructured (unmodelled) dynamics in elliptic orbits, using solar radiation pressure. The nonaffine-in-control spacecraft model includes the gravity gradient torque, the control torque produced by two solar flaps, and external time-varying disturbance torque. The objective is to control the pitch angle of the spacecraft using the solar flaps. A robust feedback linearizing control law is derived for the trajectory control of the pitch angle. The controller includes a high-gain observer, which estimates the derivatives of the pitch angle as well as a lumped unstructured nonlinearity including the external disturbance moment in the pitch dynamics for synthesis. In the closed-loop system, the designed output feedback law accomplishes large angle rotational maneuvers. Simulation results are presented which show that in the closed-loop system, precise pitch angle control is accomplished, despite unmodelled nonlinearities and external disturbance torque in the model.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
Spacecraft and interplanetary probes, orbiting beyond the Earth’s detectable atmosphere, experience physical pressure caused by impinging solar radiation. Researchers have considered use of solar radiation pressure (SRP) exerted on control surfaces mounted on satellites for the purpose of control. Researchers have proposed a variety of control surface configurations including trailing cone, reflector-collector, weathervane tail, mirror arrays, solar paddles, and solar sails for deriving solar control forces [PV1]. In the Mariner IV mission [S1] and the OTS-2 mission of the European Space Agency [R1] solar vanes and flaps were employed for the control of geostationary communication satellites.
In the past, a variety of control systems for the attitude control of satellites using solar radiation pressure have been developed. A time optimal control law for pitch angle control has been designed [R1]. The control of an Earth-pointing satellite has been also considered [PV2]. Optimal control laws for inertially-fixed attitude control have been designed [PV3, VP]. A control law for large angle maneuver has been proposed [Ve]. Joshi and Kumar designed attitude control systems for satellites orbiting in elliptic orbits [JK1]. A nonlinear feedback linearizing attitude control law has been developed [SY2]. Authors have also considered design of attitude control systems for satellite models in the presence of uncertainties. The variable structure control systems [PKB1, PKB2] and adaptive sliding mode control systems [VK1, V1] have been proposed. The solar pressure adaptive controllers for attitude control have also been developed [SY2, LS1, LS2, LS3]. Recently, an \( {\mathbf{\mathcal{L}}}_1 \) adaptive pitch angle controller using SRP has been designed [LS3]. Also a solar attitude controller [SL1] for a finite-time regulation based on a higher-order sliding mode control technique, has been developed. But for the synthesis of control law in [SL1], measurements of the first and second derivatives of the pitch angle are required. The adaptive laws developed in [PKB1, PKB2, VK1, LS2] also assumed availability of the complete state vector. Certainly, it is desirable to use fewer sensors for measurement. As such it is of interest to develop adaptive SRP attitude control systems for satellite models with unmodelled dynamics which require only the pitch angle measurement for feedback.
The contribution of this paper lies in the derivation of a robust output feedback control system for large pitch angle control of satellites in elliptic orbits using the SRP, despite uncertainties. The nonaffine-in-control model of the satellite includes unmodelled nonlinear functions, unknown inertial and solar parameters and time-varying disturbance input. The satellite is equipped with two rotating reflective control surfaces (solar flaps) for the purpose of control. It is assumed that only the pitch angle is measured for synthesis. The control torque derived from the SRP is an implicit function of the deflection angles of the solar flaps. A robust nonlinear feedback linearizing control law is designed for large angle rotational maneuvers of the satellite in the pitch plane. The control system includes a high-gain observer to obtain the estimates of the derivatives of the pitch angle and the lumped unmodelled nonlinearities in pitch dynamics for synthesis. Simulation results are presented which show that in the closed-loop system precise pitch angle trajectory control of the spacecraft moving in an elliptic orbit is accomplished, in spite of large parameter uncertainties, unmodelled nonlinearites and external disturbance moment in the model.
2 Dynamics of Spacecraft
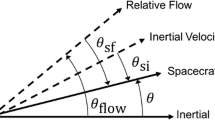
Fig. 1 shows an unsymmetrical satellite with its center of mass S rotating in an elliptic orbit about the Earth’s center O. The chosen inertial (XYZ), rotating orbital ( X 0 Y 0 Z 0) and body-fixed ( X b Y b Z b ) coordinate systems are also shown in the figure. (The axes Z, Z 0 and Z b normal to the orbital plane are not shown in the figure.) The solar aspect angle is denoted by ϕ, and ω and θ are the argument of perigee and true anomaly, respectively. The pitch angle α is equal to λ +θ, where λ is the angle between the body-fixed axis X b and the local vertical axis X 0. The solar radiation torque is produced by two identical, highly reflective, lightweight control surfaces P 1 and P 2 mounted on the satellite. The center of pressure of each control surface lies on the X b axis. The rotation angles of the two flaps measured from the axis X b are δ 1 and δ 2. Since the radiation forces on these control surfaces are directed along the surface normals, only the rotation of the satellite about the axis normal to the orbital plane is produced by the solar radiation pressure.

Orbital and satellite coordinate systems
The second-order differential equation describing the pitch attitude of the spacecraft is described by [PV2]
where M s is the net solar torque, M g is the gravitational torque, and M d (t) denotes the external time-varying disturbance torque. Of course, the chosen model is valid under the assumption that the roll and yaw angles of the satellite are controlled by means of additional solar flaps and actuators so that its axis Z b remains normal to the orbit. The net solar torque produced by the control surfaces is a nonlinear function of δ i . It has been shown in [PV1, PV2] that it is given by
where \( {\varDelta}_i= s g n\left( \sin \right(\alpha +{\beta}_s+{\delta}_i\left)\right) \), i = 1, 2 and \( \delta ={\left({\delta}_1,{\delta}_2\right)}^T \) and the nonlinear function ψ is defined in equation (1). The functions σ s and β s are
The solar aspect angle varies from 0 to 2π radians in a year; and therefore, it is a slowly varying function of θ.
The parameter \( {C}_s^{\prime } \) is \( {C}_s^{\prime }=2{\rho}_s p{A}_s l \), where A s is the surface area of the solar flap exposed to impinging photons, p is the nominal SRP constant, ρ s is the fraction of impinging photons specularly reflected, and l is the distance between the center of pressure on the solar flap and the system center of mass. The gravity gradient torque M g acting on the spacecraft is given by
where I x , I y and I z are the moments of inertia of the satellite about the body-fixed axes (X b , Y b , Z b ) and R(θ) is the distance of the satellite center of mass from the Earth’s center.
For the satellite moving in an elliptic orbit, R(θ) and the orbital angular velocity are given by [PKB2]
where e is the eccentricity, a denotes the semi-major axis of the orbit, and the mean orbital rate is \( \varOmega ={\left(\mu \slash {a}^3\right)}^{1\slash 2}\). Now instead of the time t, the true anomaly θ is treated as an independent variable. For simplicity in notation, the derivatives of functions with respect to θ will be denoted by overdots. Using Eqs.(1) and (5), it can be shown that the derivative of the pitch angle with respect to θ satisfies [PKB2, LS2]
where \( K=\left({I}_x-{I}_y\right){I}_z^{-1} \), \( {C}_s={C}_s^{\prime }{\left({I}_z{\varOmega}^2\right)}^{-1} \), and
Solving for \( \ddot{\alpha} \), Eq. (6) gives
where the nonlinear functions f 0 and v are
Note that the disturbance input M d is included in the nonlinear function f 0. For the design of the controller, it is assumed that the nonlinear function f 0 as well as the solar parameter C s are not known.
Suppose that α r is a given reference pitch angle trajectory. The objective is to design a robust control law such that the pitch angle α asymptotically converges to the reference trajectory α r , despite the presence of disturbance input. Furthermore, controller is to be synthesized using only the pitch angle α.
3 Robust Feedback Linearizing Control Law
In this section, a feedback linearizing control system is designed. Because the solar torque is an implicit function of the solar plate deflection angles, it will be convenient to treat \( \dot{\delta} \) as control input vector. Differentiating Eq. (8), it can be shown that the third derivative of the pitch angle with respect to θ satisfies
where \( x={\left(\alpha, \dot{\alpha},\ddot{\alpha}\right)}^T \), \( u=\dot{\delta}\in {R}^2 \) and the input matrix is
For the derivation of the control law, it is assumed that the function f a is represents an unstructured nonlinear function and the solar parameter C s is not known. We are interested in the region Ω s of the state space in which the rank of B s (α, θ, δ) is 1. For the derivation of control law, the unknown nonlinear function f a (x, θ, δ) and the unknown parameter C s are decomposed as
where functions with ‘*’ are the nominal values and the unknown parts are denoted with Δ(.) Then one can write Eq.(10) as
where \( \dot{\alpha}=\alpha -{\alpha}_r \) is the tracking error. Because the vector function B s is known, consider a new input signal
Define a lumped nonlinear function η ∈ R as
Then one can write Eq.(13) as
In view of Eq. (16), a feedback linearizing control law is chosen as
where p i are the feedback gains. Substituting the control law (17) in (16) gives
where s denotes the Laplace variable. The feedback gains are chosen such that the roots of λ(s) = 0 are stable. For such a choice of feedback gains, \( \dot{\alpha} \) converges to zero. But the control law (17) is not implementable because the nonlinear function η and the derivatives of α are not known.
Let z 1, z 2, z 3 and z 4 be the estimates of \( \dot{\alpha} \), \( \dot{\tilde{\alpha}} \), \( \ddot{\tilde{\alpha}} \) and η, respectively. Then, in view of Eq. (17), one chooses a modified feedback linearizing control law as
Using Eq. (19) for u a , now \( \dot{\delta}= u \) can be obtained as
Note that if the estimation errors \( \left(\dot{\alpha}-{z}_1\right) \), \( \left(\dot{\tilde{\alpha}}-{z}_2\right) \), \( \left(\ddot{\tilde{\alpha}}-{z}_3\right) \) and (η − z 4) are zero, then the control law Eq. (19) becomes the exact feedback linearizing control law Eq. (17).
4 Estimator Design
In this section, the design of an estimator is considered. The structure of the estimator is based on the results of [A1, EK1, KE]. Here the nonlinear function η is treated as a state variable. Differentiating η gives
Note that the derivative of u a can be obtained by using Eq. (19). The nonlinear function f η is not known. For the derivation of the estimator, consider a set of equations
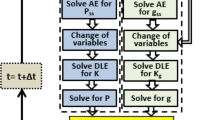
For obtaining estimates \( \left({z}_1,{z}_2,{z}_3,{z}_4\right) \) of \( \left(\tilde{\alpha},\dot{\tilde{\alpha}},\ddot{\tilde{\alpha}},\eta \right) \), a high-gain estimator is designed. The advantage of this estimator is that the estimation error converges to zero in a very short period. In view of Eq. (22), the observer is selected as
where d i , (i = 1, 2, 3, 4), are real numbers, and ε > 0 is a small parameter. The parameters d i are selected so that the roots of
are stable.
Define the estimation errors as \( {e}_1=\dot{\alpha}-{z}_1 \), \( {e}_2=\dot{\dot{\alpha}}-{z}_2 \), \( {e}_3=\ddot{\tilde{\alpha}}-{z}_3 \) and \( {e}_4=\eta -{z}_4=\tilde{\eta} \). Subtracting Eq. (23) from (22), one obtains the dynamics of the estimation error as
Introduce a change of variables as (i = 1, 2, 3, 4)
Using the definition of ξ i , Eq. (25) can be written as
where \( \xi ={\left({\xi}_1,{\xi}_2,{\xi}_3,{\xi}_4\right)}^T\in {R}^4 \) and the stable matrix A 0 is
Equation (27) is in a singularly perturbed form. It has been shown in [A1,EK1,KE] that for sufficiently small ε, the error ξ i converges to zero in a short time. For convergence analysis, one may follow the steps in the derivation of [A1, EK1]; and therefore, it is not repeated here. As the estimation error converges to zero, the control law Eq. (19) becomes a feedback linearizing control law, and in the closed-loop system including the high-gain observer Eq. (23), the performance of the deterministic feedback controller is recovered after a very short transient process. It is pointed out that in contrast to parameter adaptive systems, here the lumped unstructured nonlinear function is adapted using the dynamic estimator.
5 Simulations results
This section presents the results of digital simulation. The complete closed-loop system including the satellite model Eq. (8), the control law Eq. (19) and the high-gain observer Eq. (23) with and without external disturbance moment is simulated for a set of values of K, C s , eccentricity e, orbit inclination i and solar aspect angle ϕ. The solar aspect angle ϕ is a slowly varying function. The function ϕ given by
is used here for computation, where ϕ 0 = ϕ(θ 0). The inclination of the orbital plane of the geosynchronous satellite is i = 23. 5o. The semi-major axis is a = 42, 241 km and I z is 500 kg.m 2. The initial conditions of the spacecraft are chosen as θ o = 0, \( \alpha \left({\theta}_o\right)=10{0}^o \) and \( \dot{\alpha}\left({\theta}_o\right)=0 \). The initial values of the flap deflections are \( {\delta}_1\left({\theta}_o\right)={0}^o \) and \( {\delta}_2\left({\theta}_o\right)={0}^o \). The nominal parameter C s ∗ is set to 6.2. The nonlinear nominal function f a ∗(x, θ, δ) is assumed to be zero for simplicity in implementation; that is, f a (x, θ, δ) = Δ f a . Apparently, such a choice of Δ f a represents a large uncertainty in the model. The reference pitch angle trajectory is generated by a fifth-order reference generator given by
where α ∗ is the target pitch angle. The initial conditions are \( {\alpha}_r(0)=10{0}^o \) and \( {d}^j{\alpha}_r(0)\slash d{\theta}^j=0 \), j = 1, 2. . . 4. The poles of the reference generator are at -1, -1.5, -2.5, and -2. The roots of λ(s) in Eq.(18) are set at -2.5, -3, -4, and -3.5. The roots of Eq. (24) for the observer are -1.5, -2.5, -2, and -1; and the ε is selected to be 0.005. These controller parameters have been selected by observing the simulated responses.
Robust attitude control despite sinusoidal, random and pulse disturbance input \( {M}_d:\kern2.77695pt K=0.5,{C}_s=5, e=0.2,\kern2.77695pt i=23.{5}^o,\kern2.77695pt {\phi}_0=4{5}^o,\kern2.77695pt {\alpha}^{\ast }={0}^o \)

C s = 5, K = 0. 5, i = 23. 5, e = 0. 2, ϕ 0 = 45o, α ∗ = 0o; (a) response for sinusoidal disturbance, (b) random disturbance (c) pulse type disturbance
Simulation is done to examine the performance of the adaptive controller in the presence (i) sinusoidal, (ii) random and (iii) pulse type disturbance inputs, shown in the left, center, and right column in Fig. 2, respectively. The random disturbance is generated by passing a white noise with unit variance through a transfer function \( F(s)=5\times 1{0}^{-10}\slash \left( s+5\right) \). The initial value is α(0) = 0o, and it is desired to control the pitch angle to zero. Note that the nominal values f a ∗ and C s ∗ are zero and 6.2, respectively. It is observed in Fig. 2 that the controller achieves the regulation of the pitch angle to the target value in the presence of each disturbance input in about one orbit time. In the steady-state, it is observed that flap deflection is a periodic function in the presence of sinusoidal disturbance (Fig. 2, left column). The maximum value of control surface deflection is about (23, 22) (deg). The control signal C s v is also shown in the figure.
Extensive simulation has been performed for several values of the solar aspect angle, the eccentricity e of the orbit, the orbit inclination i, and the model parameters K and C s . These results showed that the designed control law accomplishes robust regulation of the pitch angle trajectory, even in the presence of disturbance input.
6 Conclusions
The design of a robust output feedback adaptive control system for the pitch angle control of spacecraft, orbiting in elliptic orbits, using solar radiation pressure was considered. The parameters of the nonaffine-in-control spacecraft model were assumed to be unknown, and external disturbance input was assumed to be acting on the satellite. It was assumed that only the pitch angle is measured for feedback. A robust feedback linearizing control law was designed for the tracking of reference pitch angle trajectory. For the synthesis of the control law, a high-gain estimator was designed for the estimation of the pitch angle derivatives as well as the lumped unmodelled nonlinear function in the pitch dynamics. In the closed-loop system, the controller accomplished precise pitch attitude control, despite uncertainties and disturbance input.
References
Alvarez-Ramirez,J.: Adaptive Control of Feedback Linearizable Systems: A Modeling Error Compensation Approach. Int. J. Robust Nonlin. Contr. 9 (1999) 361–377
Esfandiari, F., Khalil, H. K.: Output Feedback Stabilization of Fully Linearizable Systems. Int. J. Control. 56(5) (1992) 1007–1037
Joshi, V. K., Kumar, K.: New solar attitude control approach for satellites in elliptic orbits. J. Guidance, Control, and Dynamics. 3(1) (1980) 42–47
Khalil, H.K., Esfandiari,F.: Semiglobal Stabilization of a Class of Nonlinear Systems Using Output Feedback. IEEE Tr. Automat. Control. 38(9) (1993) 1412–1415
Lee, K.W., Singh, S.N.: Non-certainty-equivalent adaptive satellite attitude control using solar radiation pressure. Proc. IMechE. Part G: J. Aerospace Eng. 223 (2009) 977–988
Lee, K.W., Singh, S.N.: Attractive manifold-based adaptive solar attitude control of satellites in elliptic orbits. Acta Astronautica 68(1-2) (2011) 185–196
Lee, K.W., Singh, S.N.: \( {\mathbf{\mathcal{L}}}_1 \) adaptive attitude control of satellites in elliptic orbits using solar radiation pressure. Proc. IMechE. Part G: J. Aerospace Eng. 228 (2014) 611–626
Pande, K.C., Davies, M.S., Modi, V.J.: Time-optimal pitch control of satellites using solar radiation pressure. J. Spacecraft and Rockets. 11(8) (1974) 601–603
Patel, T.R., Kumar, K.D., Behdinan, K.: Satellite attitude control using solar radiation pressure based on non-linear sliding mode control. Proc. IMechE. Part G: J. Aerospace Eng. 222 (2008) 379–392
Patel, T.R., Kumar, K.D, Behdinan, K.: Variable structure control for satellite attitude stabilization in elliptic orbits using solar radiation pressure. Acta Astronautica. 64(2-3) (2009) 359–373
Pande, K.C., Venkatachalam, R.: Semipassive pitch attitude control of satellites by solar radiation pessure. IEEE Tr. Aerosp. Electron. Syst. 15(2) (1979) 194–198
Pande, K.C., Venkatachalam, R.: Solar pressure attitude stabilization of earth-pointing spacecraft. IEEE Tr. Aerosp. Electron Syst. 17(6) (1981) 748–756
Pande, K.C., Venkatachalam, R.: Optimal solar pressure attitude control of spacecraft - I: inertially-fixed attitude stabilization. Acta Astronautica. 9(9) (1982) 533–540
Renner, U.: Attitude control by solar sailing-a promising experiment with OTS-2. European Space Agency Journal. 3 (1979) 35–40
Scull, J.R.: Mariner IV revisited, or the tale of the ancient mariner. Proc. 20th International Astronautical Federation Congress, Argentina. (1969) 747–758
Srinivasan, L., Lee, K.W., Singh, S.N.: Finite-time control of satellites in elliptic orbits despite uncertainties using solar radiation pressure. AIAA SciTech (2014)
Singh, S. N., Yim, W.: Feedback linearization and solar pressure satellite attitude control. IEEE Tr. Aerosp. Electron. Syst. 32(2) (1996) 732–741
Singh, S.N., Yim, W.: Nonlinear Adaptive Spacecraft attitude control using solar radiation pressure. IEEE Tr. Aerosp. Electron. Syst. 41(3) (2005) 770–779
Varma, S.: Control of satellites using environmental forces: aerodynamic drag/ solar radiation pressure. Ph. D. Thesis, Ryerson University, Toronto, Canada (2011)
Venkatachalam, R.: Large angle pitch attitude maneuver of a satellite using solar radiation pressure. IEEE Tr. Aerosp. Electro. Syst. 29(4) (1993) 1164–1169
Varma, S., Kumar, K.D.: Fault tolerant satellite attitude control using solar radiation pressure based on nonlinear adaptive sliding mode. Acta Astronautica. 66 (2010) 486–500
Venkatachalam, R., Pande, K.C.: Optimal solar pressure attitude control of spacecraft - II:large-angle attitude maneuvers. Acta Astronautica. 9(9) (1982) 541–545
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2015 Springer International Publishing Switzerland
About this paper
Cite this paper
Srinivasan, L., Lee, K.W., Singh, S.N. (2015). Robust Output Feedback Attitude Control of Spacecraft Using Solar Radiation Pressure. In: Selvaraj, H., Zydek, D., Chmaj, G. (eds) Progress in Systems Engineering. Advances in Intelligent Systems and Computing, vol 366. Springer, Cham. https://doi.org/10.1007/978-3-319-08422-0_2
Download citation
DOI: https://doi.org/10.1007/978-3-319-08422-0_2
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-08421-3
Online ISBN: 978-3-319-08422-0
eBook Packages: EngineeringEngineering (R0)