
Abstract
A flexible bar-and-joint framework is said to be moving expansively if the distance between any two of its joints either increases or stays the same. Expansive motions of finite 2D frameworks have been fully characterized. Here, we investigate their periodic counterparts. The key to their understanding is a family of one-degree-of-freedom mechanisms called periodic pointed pseudo-triangulations. Expansive infinitesimal motions for mechanisms with several degrees of freedom form a polyhedral cone whose extremal rays are obtained from different completions of the framework to pseudo-triangulations. We illustrate its structure on a framework associated to a stellated tiling of the plane.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others

Keywords
1 Introduction
In this chapter we study the kinematics of a remarkable family of planar periodic bar-and-joint frameworks: those which possess periodic expansive deformations. For instance, we show that the periodic framework from Fig. 1 has locally a smooth 4-dimensional space of periodic deformations and all directions for expansive trajectories are contained in a polyhedral cone which has a natural geometric description and can be determined with precision. By definition, a one-parameter deformation of a flexible framework is expansive if the distance between any pair of joints either increases or stays the same. Taken in reverse, an expansive motion is contractive. Of particular interest are those one-degree-of-freedom (1dof) mechanisms which are expansive in some neighborhood of the initial configuration. We show that all expansive deformations are, infinitesimally, linear combinations with non-negative coefficients of underlying 1dof expansive mechanisms.

A periodic bar-and-joint framework
Expansion is a type of kinematic behavior with multiple applications which include deployable structure design and nano-mechanics. A popular example of a truss structure with reversible expansion/contraction properties is Hoberman’s sphere [8]. Kovacs et al. [9] describe a kinematic model of a virus and argue that it has expansive properties. More recently, Tanaka et al. [17, 18] study repetitive assemblies with expanding properties. Expanding or auxetic features, as considered in the materials science literature [4–6, 10, 12] have been shown in [3] to be implied by the stronger expansive property as defined above. In dimension two, finite expansive framework deformations have applications to robot arm motion planning [14, 15] and are well-understood mathematically [13–15]. One-degree-of-freedom expansive frameworks arise from a planar pointed pseudo-triangulation with a convex hull edge removed [15]. In the expansive interval, such a framework has a smooth configuration space. Infinitesimal expansive motions of mechanisms with more than one degree-of-freedom form a polyhedral cone [13] whose extremal rays correspond to refinements with just 1dof of the given linkage. Our purpose here is to demonstrate a similar structure underlying planar periodic frameworks.
2 Preliminaries: Periodic Frameworks and Deformations
2.1 Planar Periodic Frameworks
A periodic bar-and-joint framework \((G,\varGamma , p,\pi )\) in the plane is given by an infinite graph \(G\), a periodicity group \(\varGamma \) acting on \(G\), a placement \(p\) of the vertices of \(G\) in the Euclidean plane and a representation \(\pi \) of the periodicity group \(\varGamma \) by a lattice of translations. The edges are viewed as rigid bars: they may rotate freely around their incident joints, and maintain their lengths during framework deformations. The graph \(G=(\mathsf {V},\mathsf {E})\) has an infinite set of vertices \(\mathsf {V}\) and (unoriented) edges \(\mathsf {E}\) and is connected. The periodicity group \(\varGamma \) is a free Abelian group of rank two acting on \(G\) without fixed vertices or fixed edges. We assume that the quotient multigraph \(G/\varGamma \) is finite, and denote the number of vertex and edge orbits by \(n=|\mathsf {V}/\varGamma |\) and \(m=|\mathsf {E}/\varGamma |\). For example, the periodic framework in Fig. 1 has 6 vertex orbits and \(9\) edge orbits. The function \(p:\mathsf {V}\rightarrow \mathbb {R}^2\) gives a specific placement of the vertices as points in the plane, in such a way that any two vertices joined by an edge in \(\mathsf {E}\) are mapped to distinct points. The placement is periodic in the obvious sense that the abstract action of the periodicity group \(\varGamma \) is replicated by the action of the periodicity lattice \(\varLambda =\pi (\varGamma )\) on the placed vertices.
2.2 Periodic Deformations
A one-parameter periodic deformation is a family of placements and a family of lattices parametrized by time \((p(t), \pi (t))_t\), such that all bar lengths are maintained and the same abstract periodicity group \(\varGamma \) acts on all the frameworks of the deformed family. A periodic framework is rigid if it has no periodic deformations other than the trivial ones resulting from Euclidean isometries. The configuration space of the periodic framework is obtained from the placements of vertex orbits, subject to the algebraic constraints of prescribed (squared) lengths for edges. We factor out the \(3\)-dimensional space of planar rigid transformations. This concept of periodic deformation was introduced in [1]. A framework is rigid when corresponding to an isolated point of the configuration space; otherwise it is flexible. After choosing vertex representatives for all vertex orbits and two generators for the periodicity lattice, the Jacobean matrix at a given placement \(p\) is a \((2n+4)\times m\) matrix (called the periodic rigidity matrix and denoted by \(R\)) whose rank thus cannot exceed \(2n\,+\,1\). At a regular point the rank of the Jacobean equals the dimension of the configuration space in a small neighborhood. We say that a periodic framework is infinitesimally rigid if its periodic rigidity matrix has the maximum rank of \(2n+1\). In this case, the framework must have at least \(2n+1\) edges, properly placed. In [2], we have characterized the graphs which are periodically minimally rigid, when generically placed. A finite graph is said to be of “\(2n-2\)”-sparsity type if it has exactly \(2n-2\) edges (where \(n\) is its number of vertices), and any of its subsets of \(n'\le n\) vertices spans at most \(2n'-2\) edges.
Theorem 1
[2] A (multi)graph with \(2n+1\) edges (on \(n\) vertices) is the quotient graph of a minimally rigid periodic framework if and only if it contains a subgraph of \(2n-2\) sparsity type spanning all the vertices.
A framework is minimally rigid if it is infinitesimally rigid and the removal of any edge turns it into a flexible framework. Classical arguments can be used to show that infinitesimal (periodic) rigidity implies (periodic) rigidity and that, if a periodic framework is obtained from a minimally rigid one by the removal of \(k\) edges then the rank of its rigidity matrix is \(2n+1-k\) and its deformation space has dimension \(k\) in a neighborhood of the given placement. We say, in this case, that the framework has \(k\) degrees of freedom.
2.3 Periodic Expansive Motions
A one-parameter deformation \((p(t), \pi (t))_{t\in (-\varepsilon ,\varepsilon )}\) of a flexible framework is said to be expansive if, as the time \(t\) increases, all the distances between pairs of vertices increase or stay the same. Here, \((p(0),\pi (0))\) gives the initial framework and the corresponding infinitesimal deformation is the tangent vector to the deformation space given by the derivative at \(0\).
We describe now a family of planar periodic frameworks distinguished by two elementary and easy to verify properties.
2.4 Non-crossing Periodic Graphs
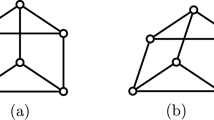
A periodic framework is non-crossing if all pairs of non-incident bars are disjoint (they do not cross, touch or overlap). All the frameworks illustrated in this chapter are non-crossing. A non-crossing framework subdivides the plane into two-dimensional regions, called faces. The periodicity group of the given framework also acts on its set of faces. The examples in Fig. 2 have 3, 2, 3 and 3 face orbits, colored distinctly. Euler’s formula \(n-m+f=0\) for the torus relates the numbers \(n, m\) and \(f\) of vertex, edge and face orbits.
2.5 Periodic Pseudo-Triangulations
A pseudo-triangle is a simple closed planar polygon with exactly three internal angles smaller than \(\pi \). A set of vectors is pointed if no subset allows a linear combination with strictly positive coefficients that sums to \(0\). Equivalently, for a pointed set of vectors, some consecutive pair (in the circular rotational order around the common vertex) induces an angle larger than \(\pi \). A planar non-crossing periodic framework is a periodic pointed pseudo-triangulation when all faces are pseudo-triangles and the framework is pointed at every vertex. An illustration for \(n=3\) is given in Fig. 2d.
Proposition 2
[3] A periodic pseudo-triangulation has \(m=2n\), that is, the number of edge orbits \(m=card(\mathsf {E}/\varGamma )\) is twice the number of vertex orbits \(n=card(\mathsf {V}/\varGamma )\).
Combined with Theorem 1, this proposition shows that periodic pointed pseudo-triangulations have the right number of edges to be smooth one-degree-of-freedom periodic mechanisms. The fact that this is indeed the case was proved in [3] based on our generalization to the periodic setting of Maxwell’s Theorem [11] on liftings and stresses of planar bar-and-joint frameworks, where we showed that a periodic pseudo-triangulation cannot have nontrivial periodic stresses.
Proposition 3
[3] The local deformation space of a periodic pseudo-triangulation is smooth and one-dimensional and continues to be so as long as the deformed framework remains a pseudo-triangulation. This is true for any relaxation of periodicity \(\tilde{\varGamma }\subset \varGamma \) of finite index.
Finally, we have proved the following, most remarkable property of periodic pseudo-triangulations.
Theorem 4
[3] Let \((G,\varGamma ,p,\pi )\) be a planar periodic pseudo-triangulation. Then the framework has a one-parameter periodic deformation, which is expansive for the entire open interval where it remains a pseudo-triangulation.
In the rest of this chapter, we extend this result from periodic pointed pseudo-triangulations to arbitrary pointed and non-crossing periodic frameworks and show how to design expansive trajectories for them. Ultimately, we obtain a complete characterization of the frameworks which support expansive motions. In addition, we give a precise procedure for calculating the set of all possible infinitesimal expansive motions of a given framework, which we show to be a polyhedral cone, called the cone of expansive infinitesimal motions. Expansive trajectories can be obtained by integrating an appropriate vector field of expansive infinitesimal motions belonging, at each point, to the corresponding cone.

Four pointed periodic tilings from [7]

The periodic framework from Fig. 2a can be turned into pointed pseudo-triangulations by the addition of three edges on the large stellated face, placed in \(14\) distinct ways (shown here up to symmetries)
3 Designing Expansive Trajectories: Examples
We illustrate the theory presented so far with the four periodic frameworks from Fig. 2, where they are depicted with colored face orbits and highlighted face representatives to facilitate the visual identification of the periodicity lattice. These examples are the stellated planar tilings of [7] (p. 239). They are all non-crossing and pointed, but only (d) is a pseudo-triangulation.
3.1 Counting Degrees of Freedom
An argument similar to the one used in [3] (based on our periodic extension of Maxwell’s Theorem) can be applied to show that none of the examples in Fig. 2 (more generally, no periodic non-crossing and pointed framework) supports a periodic stress. In particular, this implies that Theorem 1 can be applied to compute their degrees of freedom, as follows.
Framework (a) has \(n=6, m=9, f=3\), and \(k=2n+1-m=4\) dofs. Framework (b) has \(n=4, m=6, f=2\), and \(k=2n+1-m=3\) dofs. Framework (c) has \(n=6, m=9, f=3\), and \(k=2n+1-m=4\) dofs. Framework (d), which has \(n=3, m=6, f=3\), and \(k=2n+1-m=1\), has a well-defined one-parameter expansive trajectory. This framework is a deformed configuration of the familiar Kagome framework [3, 16]. Our goal now is to explain our approach for designing expansive trajectories for the other three frameworks (a), (b) and (c).
3.2 Subdividing Faces
The faces of a periodic non-crossing and pointed framework which are not pseudo-triangles can be subdivided by new edges which maintain non-crossing and pointedness. This is always possible (Theorem 5 below), but not uniquely. Figure 3 illustrates three of the ways in which the large stellated face of the framework from Fig. 2a can be subdivided; the others are obtained by applying appropriate symmetries to these three types of constructions, for a total of \(14\) possibilities.
3.3 Designing Expansive Trajectories
For the example under discussion, each of the \(14\) pseudo-triangulations induces a distinct expansive trajectory of the original framework. However, these are not the only possibilities. One may imagine the following scenario: start with one pseudo-triangulation and deform the original framework for a small time step \(\delta t\) according to its induced trajectory. Since the points have not moved too much, there will still be \(14\) ways of pseudo-triangulating the deformed framework, so now we may choose a different one. This can be continued for as long as each of the intermediate pseudo-triangular frameworks retains its pointedness. We remark that no crossings of edges will occur during an expansive motion: joints move away from each other, by definition, and the same holds for arbitrary points on the edges.
This scenario can be further refined. If we make the time step \(\delta t\) infinitesimally small, we may look not just at the finite motions induced by the pointed pseudo-triangular completions of the original framework, but also at the corresponding infinitesimal expansive motions.
3.4 Cone of Infinitesimal Expansive Motions
Given an infinitesimal deformation and a pair of vertices, the condition expressing the infinitesimal increase of the squared distance between the vertices is a linear inequality: infinitesimal deformations on one side of the equality subspace produce infinitesimal increase and on the other side infinitesimal decrease. It follows that all expansive infinitesimal motions must lie in a polyhedral cone with the apex at the origin which is the intersection of all half-spaces determined by pairs of vertices. The extremal rays of this cone correspond to the possible refinements of the framework to periodic pseudo-triangulations. For the example in Fig. 2a there are \(14\) possibilities (Fig. 3), hence a section of the cone away from the origin will result in a convex polyhedron in \(R^3\), with \(14\) vertices (Fig. 4). The combinatorics of this polyhedron can be explained as follows: each face corresponds to adding one more (non-crossing, pointedness respecting) edge-orbit to the given framework (in \(9\) ways); an edge of the polyhedron corresponds to adding two edge-orbits to the framework (\(21\) ways), and a vertex of the polyhedron corresponds to adding three edges, i.e. to one of the \(14\) ways in which the framework can be completed to a pseudo-triangulation.

A section of the cone of infinitesimal expansive motions for the 4dof framework from Fig. 2a
3.5 Convex Faces and Rigid Components
The frameworks (b) and (c) in Fig. 2 each have a convex face with more than \(3\) vertices. Such faces can be subdivided in many ways, but when all the possible edges have been added, the result is a triangulation of the convex face. Since each triangle is rigid, the triangulated face becomes a (periodically repeated) rigid component. The pseudo-triangulation ultimately obtained will expand in a manner that does not depend on how the convex face was triangulated. Therefore, although the framework in Fig. 2b can be extended in \(4\) ways (two ways for the convex face and 2 ways for the non-convex face) to a pseudo-triangulation, only two of them lead to distinct expansive trajectories. The framework in Fig. 2c has only one face that can be further subdivided, and it is convex: this framework supports exactly one expansive trajectory, in spite of the fact that it can also be pseudo-triangulated in \(14\) ways.
4 Kinematics of Periodic Expansive Motions
We now present a complete characterization of the frameworks which support expansive motions. First, we show that any periodic non-crossing and pointed framework can be extended to a pointed pseudo-triangulation by subdividing faces. The next goal is to understand the rigid components, as we have already seen in the previous examples that they play a role in determining the expansive behavior of a periodic non-crossing and pointed framework.
4.1 Extending a Periodic Non-crossing Pointed Framework to a Pseudo-Triangulation
There is a simple procedure for designing frameworks similar to those shown in Fig. 3: start with an arbitrary periodic point set in general position (i.e. triplets of points are collinear only when they belong to the same orbit). Then insert edge representatives, one by one, maintaining non-crossing and pointedness, and replicate them periodically. The following theorem proves the correctness of this procedure.

Extending a periodic pointed non-crossing framework which is not a pseudo-triangulation. a All graph cycles are trivial homology cycles. b Cycles span a one-dimensional homology subspace. c, d Cycles span the full (rational) homology group of the torus
Theorem 5
Let \(G\) be a non-crossing and pointed periodic framework which is not a pseudo-triangulation. Then there exists a new edge orbit which can be added, while maintaining the non-crossing and pointedness of the framework.
Proof
Compared to the proof for finite pseudo-triangulations [15], in the periodic setting we have to show that it is not possible that the only non-crossing edges that could be inserted have endpoints in the same orbit. The proof proceeds through a case analysis of three possible situations, differentiated by the nature of the cycles of the quotient graph \(G/\varGamma \), when viewed as a graph embedded on the (flat) torus: (a) all graph cycles are trivial homology cycles; (b) cycles span a one-dimensional homology subspace and (c) cycles span the full homology group of the torus. We now reason in the Euclidean plane and for the infinite framework \(G\). In case (a), \(G\) is disconnected and all its connected components (which repeat periodically) are finite frameworks (Fig. 5a). Vertices in the same orbit do not belong to the same component, and the planar subdivision induced by \(G\) has exactly one unbounded face \(F\). If two such connected components are visible to each other, then a standard geometric argument as in [15], based on (piecewise linear) geodesic paths, shows the existance of a tangent edge. Since it lies in the unbounded face, the tangent does not cross any existing edge, and since it is tangent, its endpoints are pointed, hence it satisfies the conclusion. In case (b) (illustrated in Fig. 5b), \(G\) is still disconnected but at least one of its connected components (as a subgraph) is infinite (and so are all of its periodically repeated copies). The existence of a tangent segment, with endpoints lying on two different connected components, and not in the same vertex orbit, follows by taking a geodesic path between two non-adjacent, inner convex vertices on the infinite face: such a path is piecewise linear and contains at least one tangent edge. Finally, in case (c) (illustrated in Fig. 5c, d) all the face cycles of the periodic graph \(G\) are finite and thus enclose polygonal regions (which may have holes). However, such a face cycle may contain vertices belonging to the same orbit (Fig. 5c, d). If such a face is not an empty pseudo-triangle, then it will have an internal tangent along the geodesic path joining two inner convex vertices. All that remains to be shown is that the two endpoints of one such tangent are not in the same vertex orbit. This follows from two observations: (a) on any simple polygonal cycle, the vertices in the same orbit appear with an inner reflex angle at most once, and (b) if an edge is tangent to a polygonal chain, then the inner angles of the polygonal cycle at these endpoints are both reflex.
The examples in Fig. 5 (where vertices of the same color indicate that they are in the same orbit) have been chosen to illustrate the properties used in the proof of the theorem. Each subsequent framework is obtained by inserting a tangent in the previous one.
As a corollary we obtain:
Corollary 6
(Flips in pseudo-triangulations) If we remove an edge orbit from a periodic pointed pseudo-triangulation, then there always exists a different edge orbit that can be added to obtain another pointed pseudo-triangulation.

A flip in a periodic pointed pseudo-triangulation
Proof We use an idea from finite pointed pseudo-triangulations [15], namely that the removal of one edge creates a face with four inner convex angles (as in Fig. 6, middle), which can be pseudo-triangulated in two ways by two distinct tangents (Fig. 6, left and right). The argument from case (c) of Theorem 5 shows that the endpoints of these tangents belong to distinct vertex orbits.
4.2 Kinematically Equivalent Frameworks
A flexible framework decomposes into rigid parts called rigid components (Fig. 7). Two periodic frameworks on the same point set are kinematically equivalent if one is obtained from the other by placing differently the bars inside rigid components, while maintaining them rigid. Such frameworks have the same configuration space. An example is illustrated in Fig. 7. Since adding a bar to a rigid component does not change the deformation space, we assume that our frameworks are non-redundant, i.e. they use the minimum number of bars on all rigid components.
Proposition 7
A rigid component of a periodic pseudo-triangulation is a finite pointed pseudo-triangulation; in particular, it is contained in its convex hull.
Proof
We only need to prove that a rigid component is finite. Then we apply a result from [15] about finite pointed pseudo-triangulations, which are contained in their convex hulls. An infinite rigid component must be, as an induced graph, periodically rigid, hence its quotient graph (on \(n'\) vertices) has \(2n'+1\) edges. As an induced graph, it is still pointed and non-crossing, hence it has at most \(2n'\) edges, a contradiction. Hence there can’t be any infinite rigid components.
Theorem 8
A non-redundant periodic framework is an expansive 1dof mechanism if and only if it is a periodic pointed pseudo-triangulation, or is kinematically equivalent to one. A periodic framework has an expansive deformation if and only if it is pointed and non-crossing or is kinematically equivalent to one.

A rigid component in a periodic pseudo-triangulation and a kinematically equivalent framework
Proof Indeed, if a set of points belong to a rigid component, the way they are interconnected does not matter (they stay at the same distance anyway), so we can replace the interconnecting pseudo-triangulation with any finite minimally rigid (Laman) graph. The construction may violate pointedness and it may be self-intersecting, but only in the interior region of the rigid component convex hull. Figure 7 illustrates the idea.
4.3 The Cone of Infinitesimal Expansive Motions of a Periodic Non-crossing and Pointed Framework
It is possible to compute with precision how many, and which edges can be used for subdividing a face into pseudo-triangles. This information is related to a combinatorial characterization of the polyhedral cone of expansive motions, and is a natural generalization of a similar result for the finite case [13].
Theorem 9
A planar periodic non-crossing and pointed framework with \(n\) vertex orbits and \(m=2n-k\) edge orbits has a smooth local deformation space of dimension \(k+1\) and allows expansive deformation trajectories. The set of all possible directions for these expansive trajectories forms a polyhedral cone in the infinitesimal deformation space of the given framework. This cone of expansive infinitesimal motions has dimension at most \(k+1\) and all its extremal rays are obtained from completions of the framework to periodic pointed pseudo-triangulations.
Proof
(Sketch) The first statement is a direct consequence of the previous discussion and of the results in [2]. The cone of expansive motions is given as the half-space intersection of the set of all linear inequalities that express the property of infinitesimal expansiveness for a pair of vertices in the periodic framework. Corollary 6 characterizes the edges of the cone. The extension to faces of all dimensions is a direct generalization of the argument used in the finite case [13].
As a final remark, we point out that if a non-crossing and pointed periodic framework has convex faces, these faces must be rigid in any expansive deformation. Any triangulation of a convex face will serve the purpose of rigidifying it.
5 Conclusion
In this chapter, we have characterized those planar non-crossing periodic bar-and-joint frameworks which allow an expansive deformation trajectory. Those with a single degree of freedom are the periodic pointed pseudo-triangulations or are obtained from them by simple replacement operations on rigid components. For several degrees of freedom, we investigated all completions of the framework to 1dof expansive mechanisms (up to kinematic equivalence). Infinitesimally, they provide the extremal rays of the cone of infinitesimal expansive motions.
References
Borcea, C.S., Streinu, I.: Periodic frameworks and flexibility. Proc. Roy. Soc. Lond. A 466, 2633–2649 (2010)
Borcea, C.S., Streinu, I.: Minimally rigid periodic graphs. Bull. Lond. Math. Soc. 46, 1093–1103 (2011)
Borcea, C.S., Streinu, I.: Liftings and stresses of periodic frameworks. In: Proceedings of the 30th Annual Symposium on Computational Geometry (SoCG’14), Kyoto, June (2014) (To appear)
Greaves, G.N., Greer, A.I., Lakes, R.S., Rouxel, T.: Poisson’s ratio and modern materials. Nat. Mater. 10, 823–837 (2011)
Grima, J.N., Alderson, A., Evans, K.E.: Auxetic behaviour from rotating rigid units. Phys. Status Solidi B 242, 561–575 (2005)
Grima, J.N., Chetcuti, E., Manicaro, E., Attard, D., Camilleri, M., Gatt, R., Evans, K.E.: On the auxetic properties of generic rotating rigid triangles. Proc. Roy. Soc. A 468, 810–830 (2012)
Grünbaum, B., Shephard, G.C.: Tilings by regular polygons. Math. Mag. 50, 227–247 (1977)
Hoberman, C.: Reversibly expandable doubly-curved truss structure. US Patent no. 4–942-700 (1991)
Kovacs, F., Tarnai, T., Guest, S.D., Fowler, P.W.: Double-link expandohedra: a mechanical model for expansion of a virus. Proc. Roy. Soc. Lond. A 460, 3191–3202 (2004)
Lakes, R.: Foam structures with a negative Poisson’s ratio. Science 235, 1038–1040 (1987)
Maxwell, J.C.: On reciprocal figures, frameworks and diagrams of forces. Trans. Roy. Soc. Edinb. 26, 1–40 (1870)
Mitschke, H., Robins, V., Mecke, K. Schröder-Turk, G.E.: Finite auxetic deformations of plane tessellations. Proc. Roy. Soc. A 469, 20120465 (2013)
Rote, G., Santos, F., Streinu, I.: Expansive motions and the polytope of pointed pseudo-triangulations. Discrete Comput. Geom. 25, 699–736 (2003)
Streinu, I.: A combinatorial approach to planar non-colliding robot arm motion planning. In: Proceedings of ACM/IEEE Symposium on Foundation of Computer Science (FOCS), pp. 443–453 (2000)
Streinu, I.: Pseudo-triangulations, rigidity and motion planning. Discrete Comput. Geom. 34, 587–635 (2005)
Sun, K., Souslov, A., Mao, X., Lubensky, T.C.: Surface phonons, elastic response, and conformal invariance in twisted kagome lattices. Proc. Nat. Acad. Sci. 109, 12369–12374 (2012)
Tanaka, H.: Bi-stiffness property of motion structures transformed into square cells. Proc. Roy. Soc. A 469, 20130063 (2013)
Tanaka, H., Shibutani, Y., Izumi, S., Sakai, S.: Planar mobility modes of 8-bar-jointed structures with a single degree of freedom. Int. J. Solids Struct. 49, 1712–1722 (2012)
Acknowledgments
The authors are partially supported by National Science Foundation grant CCF-1319366. This research was conducted while visiting Technische Universität München, with funding for the second author from the DFG-Collaborative Research Center TRR109, Discretization in Geometry and Dynamics.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2014 Springer International Publishing Switzerland
About this chapter
Cite this chapter
Borcea, C.S., Streinu, I. (2014). Kinematics of Expansive Planar Periodic Mechanisms. In: Lenarčič, J., Khatib, O. (eds) Advances in Robot Kinematics. Springer, Cham. https://doi.org/10.1007/978-3-319-06698-1_41
Download citation
DOI: https://doi.org/10.1007/978-3-319-06698-1_41
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-06697-4
Online ISBN: 978-3-319-06698-1
eBook Packages: EngineeringEngineering (R0)