
Abstract
Mineral extraction works in mines can be accompanied by problems derived from water infiltration. The networks of galleries are receptors of infiltration water that are transformed into small subway watercourses that circulate towards the lower points of exploitation.
The need to evacuate the water to the exterior makes it necessary to channel the water from the different galleries to a drainage gallery at the lowest level, and from there, it is conveyed to a surface hydraulic network.
Already in Roman times, different systems for lifting and pumping water were developed, which were mentioned by Vitruvius: the Tympanum, bucket wheel, bucket chain, Archimedes’ screw, and Ctesibius’ machine.
This paper analyzes a system devised about 2000 years ago and attributed to the Roman architect and engineer Vitruvius. The mechanism called Paternoster or Patenotre is a vertical pumping system that resembles a rosary; it has a rope-type traction system with knots or discs that push the water through a tube by the force of a wheel at the top of the well or work site. To complete the study, geometric modeling was carried out using a computer-aided design program, obtaining a three-dimensional model of the Roman mechanism and providing detailed documentation with sketches and plans. Subsequently, the 3D printing of the mechanism and a mechanical and similarity analysis were carried out.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
The model is based on the autonomous water lifting machine of the Leninz salt mines in Gipuzkoa, Spain, as well as on the manually operated system of the Wieliczka salt mines in Krakow, Poland. The 3D modeling of the system allows to explain the assembly and mechanical operation of this Vitruvian invention, showing both its simplicity and reliability.
After the mechanism is modeled and assembled, it is studied under mechanical working conditions. Therefore, the scale model is subjected to a similarity analysis by means of load work on the main elements of the system, analyzing the force factors and their effects on the shaft. At the same time, the study allows recreating the model using a different scale and applying the formulas to obtain the appropriate working conditions for the similarity analysis.
The development of CAD (Computer Aided Design) models began at the second half of the 20th century [1], and new modules continue to be developed today [2, 3]. Many 3D or vector design techniques, among others, have their origin in CAD modeling programs or applications. Over time, these models have evolved due to the impetus of industry, particularly the automotive and aerospace industries, and due to the innovation of engineers with a strong focus on developing new modeling techniques. According to M. Groover and E. Zimmers it is “a technology focused on the use of digital computers to perform certain functions in design and production” [4]. The great advantage of this type of programs, and that has made possible the development of this work, is the adaptation to changes in scales, modifications of the model or adaptations to the measures required by the manufacturer. Therefore, the main focus of CAD software development is to facilitate the creation of components through computer models with high repeatability and low investment in prototypes, changes or scrap. Engineers can develop components and complete models of machines or tools that, if produced by traditional industrial-era methods, would require a greater investment in both time and money.
Currently, to increase the accuracy and efficiency in production, advanced software is used to design components, subassemblies and systems in an integrated manner. This software allows the creation of complex systems with mechanical, electrical or electronic characteristics, and the analysis of components and systems according to their properties [5, 6]. For the development of this work, additive manufacturing or 3D printing has been used [7,8,9,10].
Technological advances are undeniable (software, 3D printing, …), but nothing would have been possible without the “inventors”, historical figures who designed using techniques that today are used by assisted design software. Polymaths like Leonardo Da Vinci, Heron of Alexandria and Archimedes of Syracuse defied known laws and created revolutionary mechanisms or structures. Ancient civilizations had instruments capable of achieving design accuracies that would have been unimaginable in their time. The first documented attempts to mechanize vertical water transport date back to the 16th century. However, it is known that ancient civilizations had mechanisms capable of fulfilling the functions required for mineral extraction or well work. As for hydraulic systems, the Minoan civilization excelled in the mastery of irrigation techniques and other systems such as cisterns, wells, aqueducts and springs. Mathematicians, architects and engineers designed large-scale hydraulic systems, such as the Copais drainage, the supply tunnel of the island of Samos or the Halis canal [11].
Archimedes invented the first water pump with his “Archimedes screw” in the 3rd century BC, although it had already been used by King Sennacherib of Assyria four centuries earlier. The machine is a helical gravimetric system that lifts large quantities of water or materials [12]. Heron of Alexandria invented the fountain and the Aeolipila, a hollow chamber suspended on an axis between two vertical pipes, which is the precursor invention of the steam engine. The fountain is the system most closely related to a water-lifting mechanism and works with air and water pressures, causing the liquid to rise through a pipe and exit vertically following the diagram in Fig. 1 [13].

Diagram of Heron's sources.
Juanelo Turriano, one of the greatest engineers of the Spanish Renaissance, advised the Philip II king technicians and engineers in the construction of dams and canals in the second half of the 16th century. After completing his work, the engineer Turriano, known as the “Renaissance Archimedes”, moved to Toledo and there he created the marvellous Toledo Artificio in 1569, a water elevation system based on the seesaw movement. This system consisted of different tubes attached at their center to a vertical axis with a collecting bowl at one end and an outlet hole at the other, and was used in a complete structure that included a bucket wheel in the first stage and the dipper towers in the second. The movement of the upper semicircle of the Toledo Artificio affected the balance of the seesaw, causing the liquid to move from end to end, depositing the water at the next level [14].
2 The Roman Patenotre
The first attempts to mechanize vertical water transport were documented in the 16th century, but it is known that ancient civilizations had mechanisms to extract water in flooded mines. Thus, the Romans used for water extraction a mechanism called Paternoster or Patenotre, which had a chain of leather knots or wooden discs, hence its similarity to the rosary and the association of the name to the system. Its description can be found in 16th century works such as “De reta metallica libri XII” by Georgii Agricolae [15], as well as in the book entitled “Los veintiún libros de los ingenios y de las máquinas”, detailing its operation and referring to its construction, illustrating the mechanism as shown in Fig. 2 [14, 16].

Illustration of the system according to Turriano [16].
The most renowned architect, writer and engineer of the first century B.C., Vitruvius, did not leave any documents about the creation of a machine like the one described above, however, there are a lot of references to his work at that time [17]. The important relationship that shows the rosary or Patenotre system with a chain wheel of buckets, transporting water through a driving wheel by means of a system of ropes and links, has caused people to assume that Vitruvius was the creator, without having exposed his ideas in a known writing.
Nevertheless, the use of the Patenotre system in the 16th century had a great impact on mines and wells across the European continent [18]. The mechanism was easy to assemble and operate, making it a valuable tool for raising water to depths of up to 60 m. Miners no longer had to carry water pots or use pulleys with buckets, but had a continuous pumping system that allowed them to dislodge entire chambers to avoid possible collapse due to humidity or the weight of the liquid. The operation was based on the impermeability between the knots or discs of the chain and the interior of the liquid elevation conduit. Thanks to the sealing with the walls of the tube, the water rose with the circular movement of the rope, remaining trapped in the walls of the tube. However, the drawback was the resistance of the discs inside the pipe, which reduced the tightness and thus the efficiency of the system. In addition, corrosion occurred due to the saline environment in which it was used. Therefore, with the development of new mechanisms, this system was replaced, except in some salt mines. Today, machines like the one described above can be found in the Leintz Gatzaga salt museum in Gipuzkoa, Spain, (Fig. 3 a) or in the Wieliczka salt mines in Krakow, Poland (Fig. 3 b).

Patenotre: a) Leintz Gatzaga mechanism. b) Wieliczka mechanism.
Although the machinery used in the salt museum and the salt mines operate in a similar way and are used for the same purpose, their propulsion system is different. In the museum, the power of a river and a wheel dragging a chain are used to lift the saline liquid to a height of eight meters, while in the mines, two workers operate a manual system to lift the water to a height of sixty meters. After analyzing both mechanisms, it was decided to focus the present study on the autonomous mechanism using the power of the river.
3 3D Modeling
3.1 Overall View
The Roman Patenotre is an hydraulic mechanism of which there is a lack of precise information about its dimensions or the components necessary for its operation.
Throughout the centuries, various civilizations have incorporated this system to other water elevation mechanisms, managing to develop a functional version such as the one present in Gipuzkoa and Wieliczka. By analyzing images and enlarging photographs, it has been possible to model the different parts of the mechanism, considering Vitruvius’ references on the use of the water wheel and the chain with platens. Figure 4 shows a draft of the mechanism without established dimensions [18]. In order to assign dimensions, the use of the water wheel and the rosary chain has been considered.

Elevation plan of the system [18].
It is a simple assembly mechanism, but the complexity lies in the chain that carries the sealing elements to pull the water, and which is placed on the traction wheel. The length of this chain depends entirely on the height of the system above the groundwater level, which directly affects the size of the water collecting pipe. The scaled dimensions of the system found in Gipuzkoa have been taken into account for the realization of this model. Figure 5 and Fig. 6 show the whole mechanism and its exploded view, allowing to visualize all the components that are part of the system.

Overall drawing of the mechanism.

Exploded view.
3.2 Main Detail Drawings
In order to analyze the system mechanically, it is necessary to examine detailed drawings of some of its main components. Therefore, it is relevant to present drawings with accurate dimensions.
Figure 7 shows the detailed drawing of the water wheel with the dimensions corresponding to the real mechanism. The model of this component is fundamental to perform the similarity analysis and the dimensional analysis to be carried out later, since the design measurements will influence the final results. This element consists of twenty paddles that collect the flow of a river, generating the driving force of the system and allowing the impeller wheel to lift the liquid from the lower water table. The inclusion of the water wheel makes it an autonomous system as it is driven by a river current. It should be noted that this component can be replaced by a manual or even electric propulsion system, depending on the conditions of use of the mechanism.

Waterwheel drawing.
Secondly, the detailed drawing of the drive wheel of the water lifting system illustrated in Fig. 8 is included. The operation of this wheel is closely related to the movement of the water drag chain and the forces it exerts on the wheel.

Traction wheel drawing.
The third element to analyze is the axle of the system. This will be examined in greater detail since the forces generated by the movement of both wheels, which have a direct impact on the performance and durability of the mechanism, must be considered. Through a fatigue study, it will be possible to know the working conditions to which the model may be subjected. Figure 9 shows the dimensions of the axle, paying special attention to diameter changes and stress concentration points, such as keyways. By analyzing the incident or induced forces on the drive and water wheels, as well as the bearing support points, it will be possible to evaluate the life of the shaft and the safety coefficients with which it will be able to operate.

Shaft drawing
3.3 Layout
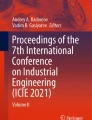
Once the design of the model was completed using Solid Edge software, it was 3D printed, as shown in Fig. 10. PLA (polylactic acid) filament was used as working material to manufacture the parts of the system. This made it possible to obtain a scale model of the Patenotre.

Printed 1:50 scale model.
Figure 11 shows the detail of the 3D printing of the two wheels of the system.

Detail of impression: a) Waterwheel, b) Drive wheel.
A detail of the assembly of the upper part of the assembly with and without chain is shown below (Fig. 12):

Detail of mock-up assembly: a) Assembly of main shaft, wheels, and side bearings, b) Complete assembly including water lifting chain.
4 Study Hypothesis
A manually driven mechanism, taking as a reference the indications of the machine present in Wieliczka, would require an approximate energy effort of 803 kJ/d, a realistic figure assuming that an operator working 8 h a day can generate an average power of 47 W, translating into 1,354 kJ/d. In the opposite case, where the mechanism operates autonomously, such as the one in Gipuzkoa, the water wheel must provide the same thrust as the operator to maintain the lifting flow rate under similar conditions [18]. In Fig. 13, the study model is included.

Schematic diagram of the system for the mechanical study
Fundamental Design
To perform the analysis of the mechanism, the dimensions presented in Table 1 will be used as a reference. These dimensions will serve as the basis for associating the new working conditions to the 1:50 scale model. The source of energy that puts the mechanism into operation is the hydraulic energy of a stream of water that strikes the water wheel with a velocity of 2.22 m/s, which gives it an angular velocity of 1.88 rad/s. By applying Bernoulli's Eq. (1), the thrust force is obtained, which, when multiplied by the radius of the wheel, results in a torque of 311 Nm. As a result, the mechanism is able to start up, the torque being responsible for moving the wheel and twisting the shaft, with a force in the water lifting chain (2).
The shaft stress state reflects the fact that the lifting chain and hydraulic forces generate alternating normal stresses, while the torsion generates average shear stresses.
Taking into account the data provided and following the mechanical similarity analysis method, the main operating variables of a scale model will be determined. The variables of velocities, both angular and linear, flow rates, forces and moments, will be recalculated under similar conditions of use in the designed model. Since the study will be carried out on the autonomous model, propelled by the water wheel, everything will be related to its movement and the thrust it may have, controlling the flow of input to the model.
5 Similarity Analysis
The concept of mechanical similarity involves evaluating a model with the goal of adapting the conditions of use to a prototype that is easier to analyze and study. This allows engineers to test their creations under conditions similar to those that real systems will experience. To achieve this, it is necessary to understand the basic units of measurement that will form the core of the dimensional equations used to express mechanical aspects of the study. These quantities are then applied and solved to obtain results applicable to real models. The meter (L) is used as the unit of length, the second (T) as the unit of time and the kilogram (M) as the unit of mass, which are all fundamental units of measurement, and are related to the basic magnitudes of the study problem, as shown in Table 2.
To perform the analysis of the Patenotre system, using the mechanical similarity in the model in question, it is necessary to consider the dimensions indicated in Table 2, since the geometric relationship will be of great importance in this study. For this purpose, the geometric similarity is established by comparing the dimensions of the model with those of the real system, as shown below:
In this case, the factor takes a value of 0.02 which can be interpreted as a scale of 1:50, knowing that the layout will have the dimensions expressed in the design drawings while the real model will work in similar conditions.
Once the geometrical similarity of the system is established, we proceed to analyze its kinematic similarity in terms of working speeds. In this analysis, the variables known in real conditions are related and, using the previously established geometrical similarity, the working conditions in the scale model are obtained. In other words, the fundamental relationship between the variables is based mainly on the geometrical relationship between the model and the real system. In the context of kinematic analysis, Reynolds and Froude numbers are considered, the latter being the one used to solve the problem in question to obtain the velocity parameters for the model.
The Froude number (Eq. 6) considers the fluid velocity (V), gravity (g) and the hydraulic working depth (Y). To obtain the velocity, the Froude number of the model is equated with the real system, clearing the velocity quotient.
From the speed the time factor can be established, which is determined from the distance and working speed of model and actual system.
The kinematic similarity is achieved when the geometric similarity is fulfilled, which allows reaching the dynamic similarity. The latter depends on the two previous ones, as well as on the system of forces acting on the mechanism, sized according to the current problem. In the study, special attention is paid to the hydrostatic force on the contact surface, subsequently equating the forces in the model and in the real system to obtain the necessary relationships. These forces will depend on the specific gravity of the fluid (γ), the distance to the center of pressure (hcg), the area (A) and gravity (g). Equations (12–15).
In the same way, we can assign the torsion caused by the hydraulic and lifting chain forces on the shaft (Eq. 16), knowing that this moment is the resultant of the force (F) times the distance, in this case the wheel radius.
Once the geometrical, kinematic and dynamic factors are known, the problem can be solved for the working conditions of the model. That is to say, by applying the similarities found, the working speeds will be obtained, as well as the forces exerted on the wheels of the system, translated to the shaft, and the torsional moments they generate.
6 Conclusions
Ancient water elevation systems are still in use today because they are robust mechanisms, with great adaptability to the environment in which they worked. Their function was to facilitate human tasks by reducing the load that an operator would have to bear or even eliminate human labor and make use only of natural energies, such as hydraulics in the case of waterwheels.
In this study we have recovered the drawings of a water elevation system from the Roman period, called Patenotre. It is a simple and very original system that served to evacuate water from the mines. The system has been analyzed mechanically by modeling all its components and obtaining the manufacturing drawings. Subsequently, by means of additive manufacturing, a model of the system was obtained. In addition, the operating conditions of the mock-up were calculated by mechanical similarity.
The use of additive manufacturing, in conjunction with system modeling, reduces construction costs because materials adaptable to test conditions can be used. In other words, depending on the requirements of the prototype, it can be printed in recycled or low-priced materials, and the necessary analysis can be performed on it without increasing the costs arising from the use of materials with higher purchase prices.
Finally, the study of mechanisms under mechanical similarity reduces the need to build full-scale systems. By performing a mechanical study with a similar system, accurate results are obtained, which can be applied to the working conditions in which the real system will be found.
References
Landes, D.S.: MIT Lincoln laboratory: technology in the national interest. ISIS J. Hist. Sci. Soc. 88(2) (1997). E.C. Freeman, Ed
Marchante, A.: 3Dnatives. CATIA, el software que trasciende la tecnología de diseño CAD (2020). https://www.3dnatives.com/es/catia-software-tecnologia-cad-080720202/#!. Accessed 9 Feb 2022
Jaycon Systems: Exporting 3D files: stl vs. obj vs. iges vs. step (2022). https://jayconsystems.com. Accessed 1 Mar 2022
Groover, M.P.: CAD/CAM: Computer-Aided Design and Manufacturing. Pearson Education (2013). ISBN 8177584162
Rosamond, Z.: All3DP (All About 3D Printing). What Is SolidWorks? – Simply Explained (2020). https://all3dp.com/2/what-is-solidworks-simply-explained. Accessed 26 Feb 2022
Marchante, A.: 3Dnatives. Solid Edge, ¿qué características tiene esta solución de modelado 3D? (2020). https://www.3dnatives.com/es/solid-edge-solucion-modelado-021120202/#!. Accessed 19 Feb 2022
Andújar, B.: Amizar Alcor Grupo Additive Manufacturing. ¿Qué es la fabricación aditiva? (2016). https://mizaradditive.com/que-es-fabricacion-aditiva/. Accessed 28 Feb 2022
3DSourced: The Complete History of 3D Printing: From 1980 to 2022 (2021). https://www.3dsourced.com/guides/history-of-3d-printing/. Accessed 5 Mar 2022
Cubo, N.: Aquae Fundación. Bioprinting: imprimiendo tejidos humanos (2016). https://www.fundacionaquae.org/bioprinting-imprimiendo-tejidos-humanos/. Accessed 10 Mar 2022
E3D: Never Forget Your Roots: A Brief History of RepRap (2020). https://e3d-online.com/blogs/news/history-of-reprap. Accessed 3 Mar 2022
Argudo García, J.J.: iaqua, Grecia o el origen de la ingeniería (2019). https://www.iagua.es/blogs/juan-jose-argudo-garcia/gestion-agua-distintas-civilizaciones-grecia-actualidad-ii. Accessed 5 Mar 2022
Instrumentos de Medición: Tornillo de Arquímedes: Qué es, características y funcionamiento (2022). https://instrumentosdemedicion.org/general/tornillo-de-arquimedes/. Accessed 10 Mar 2022
Oficina Española de Patentes y Marcas, y Universidad Autónoma de Madrid: Herón de Alejandría (2016). http://historico.oepm.es/museovirtual/galerias_tematicas.php?tipo=INVENTOR&xml=Her%C3%B3n%20de%20Alejandr%C3%ADa.xml. Accessed 3 Mar 2022
Lerma, R., Álvaro, L.: El ingenio de Juanelo Turriano. Técnica Ind. 322, 92–94 (2019)
Agricolae, G.: De re metallica libri XII. Basileae (1556)
Lastanosa, P.J.d.: Los veinte y un libros de los yngenios, y máquinas de Juanelo Turriano (1600)
Ortiz y Sanz, J.F.: Los diez libros de architectura de M. Vitruvio Poleón. Imprenta Real, Madrid (1787)
Ugalde, T.: Máquinas de elevación de agua en la minería romana. Traianvs 2010, 327–345 (2010)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2024 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Gómez Amador, A.M., Joya Machado, Á., Prieto Fernández, L., Quesada González, A., Rubio Alonso, H. (2024). Modeling, 3D Printing and Mechanical Analysis of Roman Patenotre. In: Ceccarelli, M., Aslan Seyhan, I. (eds) Explorations in the History and Heritage of Machines and Mechanisms. HMM 2024. History of Mechanism and Machine Science, vol 47. Springer, Cham. https://doi.org/10.1007/978-3-031-54876-5_28
Download citation
DOI: https://doi.org/10.1007/978-3-031-54876-5_28
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-54875-8
Online ISBN: 978-3-031-54876-5
eBook Packages: EngineeringEngineering (R0)