
Abstract
This research investigates the effect of Ultra-Wide Band (UWB) pulse duration on accurate localization in positioning systems. Through comprehensive analysis and simulations, we explore the trade-offs between pulse duration, localization accuracy, and tracking speed, specifically focusing on Time-of-Arrival (TOA)-based positioning. The study sheds light on how different pulse durations influence time resolution, signal-to-noise ratio (SNR), and the system’s ability to track dynamic movements. Our findings offer valuable insights to guide the selection of optimal pulse durations for precise localization in a variety of practical applications, striking the right balance between accuracy and real-time tracking.
Supported by organization x.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
- Ultra-Wide Band (UWB)
- power efficiency
- IoT applications
- Time-of-Arrival (TOA)
- satellite communications
- signal-to-noise ratio (SNR
1 Introduction
1.1 Background of Ultra Wide Band (UWB) Signal
Ultra-Wide Band (UWB) technology has gained significant attention in recent years due to its potential to revolutionize various industries, especially in the Internet of Things (IoT) domain. UWB signals offer a unique combination of high data rates, precise localization capabilities, and low power consumption, making them ideal for a wide range of IoT applications [7]. However, to fully realize their potential, improvements in power efficiency are necessary. In this article, we delve into the history of UWB technology, explore existing products and services, and discuss several aspects of how power efficiency can be improved to make UWB signals more suitable for IoT applications. The history of UWB technology goes back to early 20th-century, when Heinrich Hertz and Guglielmo Marconi experienced UWB for wireless communication [9]. UWB was not widely used until the 1960 s when researchers began exploring its applications in military communications such as radars. Later in the 1990 s, a wide spectrum for unlicensed UWB use was allocated by the Federal Communications Commission (FCC), which lead to a surge in relevant researches and industrial and commercial development [2]. UWB started to receive more attraction in 2000 s with applications in IoT sectors. Various companies have incorporated the UWB technology into their products and services. Some of the well known products are Apple’s U1 Chip uses UWB for spatial awareness and precise indoor positioning [3], vehicle tracking and short range communication’s application in automotive application [10], and Pet tracking in smart home applications [4].
2 Frequency Comparison of GPS, Bluetooth, and UWB Technologies
Global Positioning System (GPS), Bluetooth, and UWB are all wireless communication technologies that operate at different frequency ranges. A comparison is illustrated in Fig. 1, which shows that the GPS operates mainly in around 1.6 GHz and secondly in around 1.2 GHz. These microwave range frequencies are allocated for satellite navigation systems and are relatively low compared to some other wireless technologies. GPS signals are primarily used for accurate positioning, navigation, and timing across various applications such as mapping, vehicle tracking, and outdoor location-based services.

Comparison of UWB versus GPS, and Bluetooth
It is seen on Fig. 1 that the Bluetooth technology operates within the 2.4 GHz Industrial, Scientific, and Medical (ISM) band. Specifically, it uses frequencies between 2.402 GHz and 2.480 GHz. This frequency range is widely used for various wireless communication technologies due to its unlicensed nature. Bluetooth offers short-range wireless connectivity for devices such as smartphones, laptops, headphones, and smart home devices. Its frequency band is shared with other wireless technologies, which can sometimes lead to interference and congestion in crowded areas.
The UWB operates at a much higher frequency range compared to GPS and Bluetooth. It leverages a wide spectrum of frequencies spanning from 3.1 GHz to 10.6 GHz, which is significantly broader than the frequency ranges of GPS and Bluetooth. UWB pulses have very short durations, allowing them to occupy such a wide bandwidth. UWB’s unique frequency range enables high data rates, precise localization, and robustness against interference. It’s suitable for applications requiring accurate indoor positioning, high-data-rate communication, and ranging [18].
In summary, GPS operates in the microwave range at L1 and L2 frequencies, Bluetooth operates in the 2.4 GHz ISM band, and UWB spans a wide frequency range from 3.1 GHz to 10.6 GHz. The choice of frequency range for each technology is driven by factors such as signal propagation, interference considerations, regulatory constraints, and the specific use cases they are designed to address.
2.1 Characteristics of Ultra-Wide Band (UWB) Signals
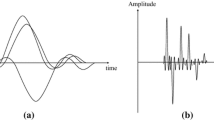
A UWB pulse signal is Visualized in Fig. 2. The pulse is centered at 2.5GHz with a Gaussian shape and a duration of 100 ns. Time domain signal is shown in the Fig. 2(a) which exhibits the Gaussian pulse shape with fast rise and fall times. It can be seen that the signal’s duration is very short and this enables high data rates and precise localization.
Frequency spectrum of the UWB pulse using the fast Fourier transform (FFT) is shown in Fig. 2(b). As expected, the UWB pulse exhibits a wide frequency spectrum, spanning over a large bandwidth due to its short pulse duration. As a result, high data rate and robustness against multi-path interference can be achieved by UWB signal. Moreover, wide bandwidth makes the power usage more efficient and makes it suitable for various IoT applications, such as satellite communications, and aerospace.
3 Precision Positioning with Ultra-Wide Band (UWB)
The Ultra-Wide Band (UWB) signal’s short duration, allows for high data rates and precise localization. A basic UWB pulse with a Gaussian shape and duration of \(T\) seconds can be expressed by Eq. 1:
where \(t\) represents time, and \(T\) is the duration of the pulse. In the other hand, the bandwidth of a UWB signal which is defined as the range of frequencies over which the signal’s energy can be considered significant can be represented by (\(B\)), and for a Gaussian-shaped UWB pulse, the bandwidth (\(B\)) can be calculated in time domain using the expression as follows:
The constant factor \(0.35\) in Eq. 2 is approximately equal to \(\frac{1}{2\pi }\). The constant factor \(0.35\) is approximately equal to \(\frac{1}{2\pi }\) and it is due to the Gaussian function and its Fourier transform. A Gaussian function in the time domain is given by:

UWB Pulse with Gaussian shape at 2.5 GHz
The Fourier transform of this Gaussian function generates a Gaussian function in the frequency domain. The standard deviation (\(\sigma \)) of the frequency domain Gaussian function is inversely proportional to the standard deviation of the time-domain Gaussian pulse, which is related to the pulse duration (\(T\)) as:
The bandwidth (\(B\)) of a Gaussian-shaped pulse can be considered as the range of frequencies where the Fourier transform of the pulse is non-zero, i.e., within \(\pm \sigma \). Therefore, the bandwidth (\(B\)) is given by:
The \(B\) can be expressed in terms of \(0.35\) instead of \(\pi \) as \(\ B = \frac{0.35}{T}\). This approximation simplifies the expression for bandwidth, and it is quite close to the actual value of \(\frac{1}{2\pi }\). More precisely, \(0.35 \approx \frac{1}{2\pi }\). Thus, the constant factor \(0.35\) in the expression for bandwidth reflects the relationship between the pulse duration (\(T\)) and the bandwidth (\(B\)) in Gaussian-shaped UWB signals. Therefore, the constant factor \(0.35\) is approximately equal to \(\frac{1}{2\pi }\) due to the mathematical properties of the Gaussian function and its Fourier transform. This approximation simplifies the expression for bandwidth and highlights the inverse relationship between pulse duration and bandwidth in UWB signals. Moreover, from this equation, it can be observed that as the duration \(T\) decreases, the bandwidth \(B\) increases proportionally. In other words, the shorter the pulse duration, the wider the bandwidth of the UWB signal. As discussed earlier, the UWB signal has a wide bandwidth, i.e. 3 GHz as shown in the simulated plot in Fig. 2, which used a Gaussian pulse shape with a duration of \(T = 100\) ns. The bandwidth (\(B\)) can be calculated using \( B = \frac{0.35}{T}\). Substituting the value of \(T = 100\) ns (or \(T = 100 \times 10^{-9}\) seconds) into the equation \(B = \frac{0.35}{100 \times 10^{-9}} = 3.5 \times 10^9\,Hz\), the bandwidth of the simulated UWB signal is calculated to be approximately \(3.5\) GHz. This range of bandwidth enables UWB to transmit data at high rates, as the Shannon-Hartley theorem [8] states that the maximum data rate (\(R\)) that can be achieved over a communication channel is:
where the SNR is the signal-to-noise ratio. With UWB’s wide bandwidth, the channel capacity [\(\log _2(1 + SNR)\)] increases, allowing for higher data rates compared to narrow-band systems. The relationship between the Ultra-Wide Band (UWB) signal’s bandwidth, its duration, data rate, and range is analyzed and the following figures are presented to visualize these relationships. Figure 3 illustrates the bandwidth and data rate changes with UWB signal’s duration.
As it can be seen on Fig. 3(a), as the pulse duration decreases (\(T\)), the bandwidth (\(B\)) increases. This inverse relationship aligns with the theoretical expression \(B = \frac{0.35}{T}\) for a Gaussian-shaped UWB pulse, where \(0.35\) is approximately equal to \(\frac{1}{2\pi }\). Hence, shorter pulse durations result in wider bandwidths, which is a desirable characteristic for achieving high data rates. This effect is illustrated by Fig. 3(b). A fixed signal-to-noise ratio (SNR) of 10 dB is used in order to calculate the data rate based on the Shannon-Hartley theorem. This is due to the fact that in wireless communication, the SNR signifies the balance between the strength of the desired signal and the level of background noise and interference. In the context of the Shannon-Hartley theorem, a standardized SNR value, often set at 10 dB, is employed to calculate data rates.
This fixed SNR value acts as a practical reference for analyzing communication system performance, facilitating straightforward comparisons across various technologies. The choice of 10 dB simplifies calculations and offers a common ground for evaluation.
For instance, in the Shannon-Hartley theorem, which relates channel capacity C to bandwidth B and SNR \(\text {SNR}\), so we can see that \(C = B \cdot \log _{2}(1 +\text {SNR})\), where C denotes capacity in bits per second and B represents bandwidth in hertz, the utilization of an SNR of 10 dB results in a clear numerical outcome. Decibels \(\text {dB}\) represent a logarithmic scale that conveniently condenses a wide range of values into a comprehensible format.
By incorporating an SNR of 10 dB in data rate calculations, the relationship between bandwidth and data transmission capacity becomes lucid. While actual SNR values in real-world scenarios can vary, this standardized reference value serves as a valuable comparative tool, illustrating the influence of different bandwidths on data rates under typical signal-to-noise circumstances.

a) UWB Bandwidth vs. Pulse Duration, b) UWB Data Rate vs. Pulse Duration
Operating Ultra-Wide Band (UWB) signals close to the noise level offers a range of strategic advantages in wireless communication. By utilizing UWB’s wide frequency spectrum and low power spectral density, this approach optimizes spectrum utilization and enhances coexistence with other signals. UWB’s innate resistance to narrowband interference is particularly potent in this configuration, ensuring robust data transmission in noisy environments. Moreover, operating UWB near the noise floor amplifies its security profile, as its low probability of detection hinders unauthorized signal interception. This strategy aligns with energy efficiency goals, as UWB’s thin spread of energy across the spectrum reduces its impact on noise levels for other communication systems. Additionally, regulatory compliance is more easily maintained. Altogether, this methodology harnesses UWB’s distinctive traits to achieve resilient and efficient wireless communication.
It should be noted that UWB signals are uniquely set apart from noise by their distinct characteristics. With their wide frequency spectrum distribution and low power spectral density, UWB signals exhibit a spread of energy across frequencies, enabling easy differentiation from the more concentrated and unstructured nature of noise. Their utilization of extremely short pulses, often in the nanosecond range, facilitates precise temporal patterns that stand out against noise. This, coupled with their exceptional time resolution, allows for accurate time-of-arrival measurements. UWB signals also benefit from a favorable Signal-to-Noise Ratio (SNR) due to their wide bandwidth and low power density, ensuring clear distinction from background noise. UWB’s compliance with regulatory frameworks further ensures its differentiation from other electromagnetic emissions. Collectively, these distinctive attributes empower UWB signals to effectively and reliably overcome the challenges posed by noise, making them well-suited for applications demanding accurate positioning, high data rates, and robust communication in complex wireless environments. The range of UWB is also analyzed by varying the pulse duration (\(T\)), and using time-of-arrival (TOA) method.

UWB Range vs. Pulse Duration
Figure 4 shows as the pulse duration increases, the range also increases, as the longer pulse allows for more accurate time-of-arrival measurements. This is because a longer pulse provides a better-defined signal presence, making it easier for the receiver to precisely determine when the pulse arrived. Shorter pulses with rapid rise and fall times can lead to timing uncertainties, resulting in less accurate TOA measurements. In essence, longer pulses offer higher time resolution, enhancing the receiver’s ability to pinpoint the exact arrival time of the signal. This accuracy directly improves distance calculation and localization precision, essential for reliable positioning systems.
This direct relationship indicates that by achieving high data rate, the UWB signal is capable of reaching further distance as desired in many long distance IoT applications. High bandwidth and high data rate makes UWB signals well-suited for real-time communication, fast tracking applications in IoT devices. The short and rapid pulse allows for highly accurate time-of-arrival (TOA) measurements, making it ideal for precise localization and indoor positioning of IoT applications such as indoor trackings and healthcare applications.
4 UWB Tracking and Positioning
The tracking process is done through time-of-arrival (TOA) or time-difference-of-arrival (TDOA) measurements [11], which involves determining the time it takes for the UWB signal to travel between a transmitter and receiver or receivers [12].
4.1 Time-of-Arrival (TOA) Localization
In TOA localization, the UWB transmitter emits a short-duration pulse, and UWB receivers within the range detect the transmitted pulse [13]. Each receiver records the time at which it received the pulse with high precision [14]. The distance between the transmitter and each receiver is calculated based on the time difference between the transmission time and reception time [11]. Using the speed of light as a constant, the distance can be determined as:
where c is the speed of light and TOA is the time-of-arrival. The factor of \(2\) in the denominator accounts for the round-trip time of the signal. Since the speed of light is constant (\(c \approx 3 \times 10^8\) meters per second), the accuracy of distance measurements mainly depends on the precision of TOA measurements. Trilateration (2D) or multilateration (3D) techniques are then applied to determine the position of the transmitter based on the distances from three or more receivers [15]. For example if a UWB pulse is transmitted at time \(t_t\) and received at time \(t_r\). The TOA, is calculated by \(t = t_r - t_t \).
4.2 Time-Difference-of-Arrival (TDOA) Localization
TDOA localization requires at least two UWB receivers to detect the transmitted pulse [19]. Each receiver records the time at which it received the pulse, similar to TOA [13]. The time difference between the arrivals of the pulse at different receivers, known as TDOA, is then calculated [16]. Using the speed of light, the difference in distances between the transmitter and the two receivers can be determined based on the TDOA:
multilateration techniques together with the TDOA from multiple receiver pairs, determines the position of the transmitter in 2D or 3D space [11]. In TDOA localization, multiple UWB receivers are used to detect the same UWB pulse transmitted by a single UWB transmitter. The TDOA between the arrivals of the pulse at different receivers is measured. For example if two receivers, \(R_1\) and \(R_2\) are considered, the pulse is received at times \(t_{r_1}\) and \(t_{r_2}\), respectively, therefore, the TDOA, is calculated by \(t_{12} = t_{r_1} - t_{r_2}\). By combining the TDOA measurements from multiple receivers, the location of the transmitter can be determined using multilateration techniques, such as the intersection of hyperbolas or spheres corresponding to the measured TDOAs.
4.3 Real Time Tracking and Accuracy
To achieve real-time tracking, specially when the object or person is moving, the UWB system can continually update the position of the transmitter based on new TOA or TDOA measurements received from the UWB receivers [17]. The accuracy of UWB-based localization depends on several factors, including the synchronization accuracy between transmitter and receivers, multipath effects, and resolution of TOA/TDOA measurements. UWB localization is known for its high accuracy, and in clear line-of-sight environments, With precise timing and synchronization techniques, UWB localization can achieve centimeter-level accuracy. However, in a complex indoor environments with multipath reflections, the accuracy may degrade as the signal suffers from interference and reflections.
4.4 The Impact of Pulse Duration on Tracking
There is a trade-off between localization accuracy and tracking speed. The pulse duration directly influences the Time-of-Arrival (TOA) or Time-Difference-of-Arrival (TDOA) measurements, which are essential for accurate localization in UWB systems. Shorter pulses provide better time resolution, enabling more precise TOA or TDOA measurements. This results in higher localization accuracy, especially in environments with multipath reflections and noise. In the other hand, shorter pulses reduce the energy per pulse, which can lead to weaker received signal strength at the receivers.
This can affect the tracking speed as the system may require more pulses to achieve a reliable tracking update. Longer pulses, while providing more energy and better tracking performance, might reduce the localization accuracy due to lower time resolution. The effect of Pulse Duration on Localization Accuracy and Tracking Speed are analyzed and the results are visualized in the Fig. 5. It is observed from Fig. 5(a) that localization accuracy changes with varying pulse durations, and as the pulse duration decreases, better time resolution is achieved and therefore the localization accuracy improves. Figure 5(b) displays the relationship between the tracking speed and different pulse durations. It is observed that as the pulse duration decreases, shorter pulses allow for more frequent updates, and it results in better tracking speed. This analysis helps in understanding the trade-offs between localization accuracy and tracking speed in UWB positioning systems and can guide the selection of an appropriate pulse duration for a specific application’s requirements.

a) Effect of Pulse Duration on Localization Accuracy, b) Effect of Pulse Duration on Tracking Speed
5 Factors Influencing UWB Localization Accuracy
Signal propagation, interference, and environmental conditions play crucial roles in influencing the performance of Ultra-Wide Band (UWB) localization and its accuracy. Here’s a detailed explanation of their impacts:
-
UWB signals are known by their wide bandwidth, which makes them strong to multi-path propagation. However, certain signal propagation phenomena can still affect them. For example, Reflections can introduce delays in the signal arrival. In indoor environments, UWB signals can reflect off walls, floors, and objects. The delays in the signal arrival, leads to errors in time-of-arrival (TOA), which may degrade localization accuracy, if not compensated. Multipath Fading may occur due to bouncing and reflections and makes the signal to take multiple paths to reach the receiver. From signal processing point of view, the constructive and/or destructive interference of various paths can result in fluctuations in signal strength, affecting the accuracy of the measured distance.
-
Another phenomena is known as interference of signals from other wireless devices and electronic signals operating in the same or close frequency range that can disrupt UWB communication and localization. The interference can add extra noise to the received signal which leads to inaccurate time measurement. This can result in errors in TOA or time-difference-of-arrival (TDOA) calculations and subsequently impact the localization. Moreover data can get corrupted due to interference which leads to loss of data and errors in the transmitted information, therefore, the acuracy of the position may degrade.
-
Additionally, environmental Conditions in which UWB systems operate can also impact their localization accuracy. For example physical obstructions such as walls, obstacles, and furniture can reflect of block the UWB pulses. This can lead to signal delays, attenuation, and changes in signal propagation paths, affecting the accuracy. Moreover,it should be noted that in ideal Line of Sight (LOS) scenarios, where there is a direct and unobstructed path between the transmitter and receiver, UWB accuracy can be higher. In Non-Line-of-Sight (NLOS) scenarios, where there are obstacles or reflections, accuracy may decrease due to complex signal paths. Changes in the environment, such as moving objects or changing layouts, can also affect UWB signal propagation and accuracy. Therefore, a dynamic environment requires an adaptive algorithm to maintain accurate localization. The noise from environment such as electromagnetic interference from other devices transmitting nearby, can affect the accuracy of the UWB system’s sensors and transceivers and it is necessary to consider employing filters to mitigate the impact of noise on accuracy.
The impacts of signal propagation, interference, and environmental conditions on UWB localization accuracy indicates the need for sophisticated algorithms, signal processing techniques, and hardware design to minimize these effects. Therefore, error correction methods, adaptive algorithms, and careful calibration are generally fundamental features of a UWB system in order to ensure accurate and reliable localization in various operating conditions.
6 Future Works
The integration of UWB technology into the Internet of Things (IoT) heralds a new era of innovation. Drawing from the extensive discussions on UWB’s attributes, power efficiency enhancements, and their implications for IoT landscapes, the horizon is rife with exciting prospects and untapped potential across diverse domains. Such as:
-
UWB’s Trailblazing Path: UWB technology’s trajectory is marked by relentless progress. Ongoing research seeks to enhance hardware, algorithms, and protocols. Advancements include sophisticated UWB transceivers, tailored waveform designs, and robust error mitigation tactics combating interference and attenuation. The synergy between academia and industry is set to yield breakthroughs, elevating performance and expanding UWB’s adoption.
-
Elevating Precision in Localization: The pursuit of pinpoint accuracy persists, poised to transition UWB into fusion-driven strategies. Collaborations with sensor fusion, Wi-Fi, and Bluetooth will heighten accuracy in complex environments. Dynamic adaptive algorithms are anticipated, recalibrating UWB parameters contextually to maintain robustness amid signal propagation challenges.
-
UWB’s Dance with Mobility and Tracking: The integration of UWB into real-time tracking systems promises a symphony of possibilities. Novel tracking algorithms are set to empower UWB with seamless updates on mobile entities and individuals. This advancement holds profound implications for scenarios ranging from industrial asset tracking to seamless navigation within healthcare and retail domains.
-
UWB as a Sentinel of Security and Privacy: UWB’s distinctive attributes also open the gateway to fortified communication security and individual privacy in the IoT arena. Future endeavors will delve into encryption techniques and authentication protocols specially curated for UWB signals, creating an impregnable fortress for data integrity and user confidentiality within UWB-enabled ecosystems.
-
Breathing Life into Ultra-Low Power IoT Devices: Energy efficiency remains a cornerstone of IoT architecture. Future trajectories envision a further reduction in UWB-powered device energy consumption, ensuring extended battery longevity for wearables, smart sensors, and remote monitoring instruments.
-
The Marriage of UWB with 5G and Beyond: The synergy between UWB and the cascading waves of 5G and its successors is poised for exploration. The harmonious integration with 5G networks is projected to fortify UWB’s range and reliability, broadening its vistas beyond short-range scenarios.
-
Navigating Regulation and Standardization: As UWB sets sail, the currents of regulation and standardization merit careful navigation. Future inquiries will unravel regulatory intricacies, champion spectrum accessibility, and contribute to standardization endeavors that pave the way for a seamless global embrace of UWB.
-
Uncharted Research Horizons: Emerging research frontiers beckon. The aerospace sector holds great promise, with UWB poised to revolutionize satellite communication, navigation, and surveillance systems. Moreover, as safeguarding becomes paramount, UWB’s security virtues can fortify critical infrastructure with resilient and secure connectivity.
UWB technology’s narrative unfolds dramatically in aerospace and safeguard applications. In aviation and satellite systems, UWB reshapes navigation, communication, and tracking, while its security attributes fortify critical infrastructure with resilient connectivity. This unfolding saga marks an era where UWB orchestrates a symphony of accuracy, efficiency, and connectivity, weaving seamlessly into IoT and beyond. With vast research potential, these frontiers promise transformative discoveries that will shape UWB’s next evolutionary phase.
7 Conclusion
This research extensively investigates the impact of Ultra-Wide Band (UWB) pulse duration on precise localization in positioning systems. Through comprehensive analysis and simulations, the trade-offs between pulse duration, localization accuracy, and tracking speed has been explored with a specific focus on Time-of-Arrival (TOA) and Time-Difference-of-Arrival (TDOA) methods. We observe that shorter pulses offer improved time resolution, leading to higher localization accuracy, while longer pulses enhance tracking speed by providing more energy. The results contribute significantly to understanding the balance between localization accuracy and tracking speed in UWB positioning systems, assisting in the selection of an appropriate pulse duration tailored to the specific requirements of each application. This research provides valuable knowledge to advance the application of UWB technology in various domains, including IoT, satellite communications, aerospace, and healthcare.
References
Dardari, D., Decarli, N., Decarli, M.: Ultra-Wideband Radar Sensing: Theory and Applications. CRC Press (2019)
Federal Communications Commission (FCC). Ultra-Wideband (UWB) Technology (2021). https://www.fcc.gov/engineering-technology/policy-and-rules-division/general/unlicensed-devices/ultra-wideband-uwb-technology
Apple Inc. \(U1\)- Chip Ultra-Wideband Technology Overview (2021). https://developer.apple.com/documentation/uikit/u1chip
Dardari, D., Conti, A., Ferner, U., Giorgetti, A., Win, M.Z., Zanier, M.: Ranging with ultrawide bandwidth signals in multipath environments. Proc. IEEE 101(6), 1390–1402 (2013)
Kim, J., Kim, K.: Power-efficient ultra-wideband communication systems. IEEE Trans. Circuits Syst. I Regul. Pap. 67(2), 610–623 (2020)
Khatun, S., Islam, S.M., Hossain, M.S., Islam, M.T.: Energy harvesting and transfer for next-generation wireless communications: a comprehensive survey. IEEE Access 9, 78913–78930 (2021)
Dardari, D., Decarli, N., Decarli, M.: Ultra-Wideband Radar Sensing: Theory and Applications. CRC Press (2019)
Gragido, W., Pirc, J., Selby, N., Molina, D.: Chapter 4 - signal-to-noise ratio. In: Gragido, W., Pirc, J., Selby, N., Molina, D. (eds.) Blackhatonomics, Syngress, pp. 45–55 (2013). https://doi.org/10.1016/B978-1-59-749740-4.00004-6. ISBN 9781597497404
Hertz, H., Marconi, G.: UWB technology: Early 20th-century experiments in wireless communication, Journal of Wireless Communication History
Kocks, C.: A localization and tracking application for UWB. In: 2nd International Symposium on Applied Sciences in Biomedical and Communication Technologies, Bratislava, Slovakia 2009, pp. 1–5 (2009). https://doi.org/10.1109/ISABEL.2009.5373696
Liu, C., Pan, C., Wei, T., Wu, Y.: Ultra-wideband positioning and its applications. IEEE Trans. Industr. Electron. 67(5), 3911–3921 (2020)
Huang, Y., Gao, F.: Principles and challenges of ultra-wideband technology in wireless sensor networks. Int. J. Distrib. Sens. Netw. 16(3), 1550147720910455 (2020)
Alshbatat, A.M., Abu Tarboush, H.F.: A survey on localization algorithms in wireless sensor networks. Int. J. Distrib. Sens. Netw. 13(3), 1550147717699203 (2017)
He, M., Xiao, B., Wang, Z., Shen, L.: Time synchronization for ultra-wideband-based wireless sensor networks. IEEE Trans. Industr. Inf. 15(1), 341–350 (2019)
Rahman, S.M.M., Khan, M.F.M., Rahman, M.T.: Performance evaluation of time of arrival (TOA) and time difference of arrival (TDOA) based localization techniques for wireless sensor networks. J. Commun. Networks 22(1), 50–57 (2020)
Thomas, J.L., Veen, A.J.V., Molisch, A.F.: Ultra-wideband indoor positioning systems: a comparative survey. IEEE Commun. Surv. Tutorials 21(1), 16–34 (2019)
Mo, L., Yiu, S.M., Mamoulis, N.: Accurate and efficient range-based indoor localization. IEEE Trans. Mob. Comput. 15(5), 1201–1214 (2016)
Inpixon: Ultra-Wideband (UWB) Technology. https://www.inpixon.com/technology/standards/ultra-wideband
Huynh, T., Brennan, C.: Efficient UWB indoor localization using ray-tracing propagation. In: 9th IT and T Conference, School of Computer Sciences, Technological University Dublin (2009)
Acknowledgement
This publication has emanated from research conducted with the financial support of Science Foundation Ireland (SFI) under Grant Number 13/RC/2077_P2.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Mohammady, S. (2023). An In-Depth Examination of Ultra-Wide Band (UWB) Pulse Duration for Accurate Localization. In: Zhang, Y., Zhang, LJ. (eds) Web Services – ICWS 2023. ICWS 2023. Lecture Notes in Computer Science, vol 14209. Springer, Cham. https://doi.org/10.1007/978-3-031-44836-2_8
Download citation
DOI: https://doi.org/10.1007/978-3-031-44836-2_8
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-44835-5
Online ISBN: 978-3-031-44836-2
eBook Packages: Computer ScienceComputer Science (R0)