
Abstract
Monitoring, inspection, maintenance, construction, and restoration are nowadays challenging activities conducted during the process of civil infrastructure management, due to the revolutionary impact of mechatronics and information technology for their automation. In this paper, numerical simulations are proposed for a Cable-Driven Parallel Manipulator designed for inspection and monitoring of buildings and structures. Robots can effectively replace personnel for performing dangerous or unsafe operations. Referring to structures’ inspection, autonomous or tele-operated solutions can be used. In addition to conventional robotics, such as drones, mobile robots and climbing robots, which have become a reality in the last years, Cable-Driven Robots can be used, as completely new application, to locate the terminal link, i.e., the end-effector, carrying suitable sensors and/or specific tools, in wide application areas. In this paper, we address the problem of considering a specific type of buildings, those for which there are not regularly shaped walls or edges. We consider steel glass-façades buildings, with irregular shape. For this kind of buildings, the inspection can be very difficult, time consuming and quite expensive. Considering an irregular shape building, design consideration and simulations results of the inspection are proposed in this paper.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Automation in production has become the key issue for ensuring the requested quality with reasonable manufacturing costs. Conventional commercial robots, due to their limited workspace, or the high cost of the large gantry robots for construction engineering, leaves the manipulation of heavy payloads over large workspaces still done with traditional non-automated cranes. Handling of heavy loads in a huge workspace can be labor-intensive and involves multiple cranes operated by several individuals. This kind of task has drawbacks related to the limited flexibility and orientation capabilities of the cranes, including the increase the possibility of labor accidents [1].
In order to overcome these drawbacks, robotics and mechatronics were introduced to many sectors, including industrial and construction companies, but also for non-conventional applications related to agriculture [2], search and rescue [3], remote exploration [4], monitoring of historical sites [5], motion assisting devices [6], just to mention some. The above-mentioned robotic systems are constituted by rigid links parts connected by multiple joints and uses different types of actuators commanded by suitable control. Robotics have been developed and can be applied for performing NDE of infrastructure. However, still a limited number of initiatives are developed towards semi-autonomous/fully autonomous systems that can reduce the overall time and resources taken to provide regular health monitoring services for civil infrastructures. It is for this reason that the current situation warrants the development of robust, replicable and cost-effective technological platforms for the SHM of civil infrastructure studies.
As completely new application, CDPM initially developed as laboratory prototypes, then haptic systems, large-scale 3D printing [7] and camera pointing systems [8] are starting to be designed for automation in construction activities, laser distance-measuring device [9], maintenance of vertical green gardens [10], large scale assembly of solar panels [11], washing of large areas such as airplanes, windows, walls, curtain widows, automated assembly, repair and maintenance of facades panels [12]. Applications as mobility assistance are reported in [13, 14]. Current applications and main characteristics are reported in [15]. A recent application is referring to automatic curtain wall mounting using a CDPM was proposed in [16]. Large-scale 3D printing was proposed and experimentally tested in [17]. Authors in [18] have proposed a solution for robotic refurbishment by using CDPM. According to the latest research and results in very recent years, CDPM are starting to be addressed for Logistics because they can quickly handle pallets and storage in automated mode, in naval construction and renewable energy, because they can operate on large and heavy parts and structures, also involving welding, sandblasting, painting, inspection and deconstruction. In nuclear industry they can move material and equipment, perform maintenance, inspection, monitoring in radioactive areas,
In this paper, we present an application of a CDPM for inspection and monitoring of buildings and structures, but instead of considering regularly those with regularly shaped walls, typically horizontal or vertical and squared or rectangular we focus the attention on steel glass-façades buildings, with irregular shape. For this kind of buildings, the inspection can be very difficult, time consuming and quite expensive, because they involve large scaffoldings, or experienced personnel as sky climbers.
As an illustrative case of study, we consider a building with elliptical base, having the roof made of thin glassy skin supported by vertical steel blades and an elliptical steel ring. Steel pilasters sustain the drome, as it will described in the next section. Considering an irregular shape building, design consideration and simulations of the inspection are proposed in this paper. Simulation tools are very effecting when it is not possible to reproduce phenomena with real scale prototypes or construction, or in the case of monumental buildings or architectures that cannot be accessed in advance or have strict rules in the access. Moreover, the use of advanced tools makes possible to take into account several environmental conditions, as it was reported in [14]. In this paper we propose the modelling a glass and steel building and simulation of inspection/interaction with the glass façade.
2 Design Considerations for Infrastructure Inspection Robots
Existing structures and infrastructures often need periodic inspections for detecting possible deterioration and programming their maintenance. Inspections can be classified as initial inspections, routine inspections, damage inspections, in-depth inspections, fracture-critical inspections, underwater inspections, and special inspections. The final goal of all of them is to extend the construction life and avoid critical failure. However, taking into account that different size, geometry, complexity of conservation, environmental conditions, etc., are present in constructions, the design of automated procedures for executing these inspections and maintenance tasks is a challenging matter.
Worldwide, large amount of funds is invested each year for infrastructure inspection using Non-Destructive Testing/Evaluation (NDT/NDE) technologies. Structures that were built worldwide in the mid-20th century or earlier are becoming an important problem, because they are reaching their life expectancy leaving questions about their structural integrity and deterioration levels, and thus have strong needs for routine inspection and maintenance to ensure sustainability.
Parallel cable-driven robotics provides the best cost-effective solution, automated and manually controlled, over large or very large workspaces. They are able to position any kind of tooling or another anthropomorphic robot, accurately in along a wide workspace withstanding external loads just by using cables.
According to the specific application related to the inspection and monitoring of large surfaces of buildings, the following issues should be considered.
Primarily, the task to be accomplished is to located sensors installed on the terminal link, called end-effectors in the environment. According to that, the first choice is to design the way of the movement of the robot. Traditionally, the first choice and also the most used one in outdoor inspection is using Unmanned Aerial Vehicles (UAVs), [19], which offer the great advantage of high flexibility, reliable wireless information transmission, suffering of the well-known drawback of limited time of flight and payload. On the other hand, for indoor inspection and monitoring of infrastructures and confined spaces Unmanned Ground Vehicles (UGV) have been designed and used extensively, as reported in [20]. Mobile robots may have wheels, legs, track or combination of the latter being hybrid solutions. They can operate both autonomously, without the use of navigation devices in an unstructured environment, or along a predetermined route, by using navigation devices in a relatively controlled environment. a special type of mobile robots are those related to pipe inspection for Oil&Gas or water distribution lines, the design is specific, therefore they have been named as serpentine or snake robots, as [21]. These systems must negotiate with narrow and long confined working volume, having the ability of negotiating obstacles and curved pipes.
A new type of robot is the CDPM, a special type of parallel manipulator in which the rigid links constituting the legs are replaced by cables, which connects the fixed frame to the end-effector.
A cable-driven parallel robot is mainly composed by few components. The winches, which include motor, encoder, drum; the cables, which are wounded around the drum and whose lengths are changed by controlling the motors; the pulleys that are needed to redirect cables conveniently, the fixed frame and moving platform (end-effector) for anchoring the cables both sides; finally, the controller and drives.
The pulleys in particular, can be strategically located for allowing the cable going from the winch to the desired output point. Pulleys can be fixed on the building or on a dedicated frame, according to the specific needs.
The lengths of the cables must be synchronized to perform the requested task and controlled in order to provide the desired end-effector motion in the Cartesian space. CDPMs open business perspectives in multiple sectors with a wide range of applications, as it was detailed in the Introduction.
Referring to the mechatronic systems, main components, are the mechanical part, the control device, software for the control device, sensors, a drive, and a set of actuators. The control device is usually a microcontroller, laptop or personal computer. Software used for Robotics applications can be a low-level language, a high-level language, or special software for real-time systems. The used sensors can be internal, i.e. depends on the functionality of the robot, and level of autonomy, for example, accurate calculation, contact or non-contact proximity sensors, collision avoidance, positioning and other specific applications. External sensors’ suite [22] depend specifically on the addressed application.
Vision systems are widely used in robots for inspection and monitoring, for perception of the environment, as well as for acquiring specific data related on the survey. Thanks to this type of robot sensing system it possible to generate signals for controlling the robot based on the perception and processing of video information.
Currently, serial production of a wide variety of robot vision systems is expanding worldwide.
3 Cable-Driven Parallel Manipulators
Cable-driven parallel manipulators are a class of parallel robots that consist of a fixed base and mobile platform, which are connected by several cables. Due to the nature of cables, they posses in general good characteristics such as: good inertial properties, which give the possibility to reach high accelerations. Moreover, the actuation and transmission systems can be conveniently fixed on the base. Cables are lightweight and CDPMs can have higher payload-to-weight ratio, which makes them effective for many applications. Moreover, they can be relatively low-cost, modular, and easy to reconfigure according to their design.
Cable manipulators have been classified into two basic types, the fully-constrained and under-constrained types, based on the extent to which the end-effector is constrained by cables only [23] or they rely on gravity, as it is schematically shown in Fig. 1. The necessary but not sufficient condition for a mobile platform with n degrees-of-freedom to have a fully-controlled motion is considering at least m = n + 1 cables, which refers to a completely restrained positioning mechanisms defined in [24], since many cable robots can be over-determined with respect to forward kinematics but under-determined with respect to cable forces distribution [23]. Therefore, an issue for their use is the evaluation of the cable force distributions. Classification based on attachment points is given in Fig. 2.

Schematic representation for classification of CDPMs: a) fully constrained, b) over-constrained; c) under-constrained (suspended).

Schematic representation for attachment points for CDPMs: a) point-mass, b) multiple-points; c) pulley solution proposed in [25] for model simplification.
Point-mass CDPMs are those in which all cables are joining at the same point on the mobile platform, the advantage is avoiding cables’ interferences, the disadvantage is not controlling the orientation. The multiple-points connection is the most used because it is possible to control position and orientation of the moving platform, but the pulleys dimension must be taken into account in the model. In order to operate the robot avoiding the need of including the pulleys dimension in the mathematical model, a design concept has been introduced in [25] and successfully used, it will be applied in the design of CDPM simulated in this paper.
Considering multiple cables, the motion of the mobile platform can be obtained by increasing the number of actuated cables, which will also reduce the tension in each cable for a given payload, but the workspace will be limited by possible interferences among cables and cables with mobile platform, the problem has been investigated in [26]. Several workspace classifications have been proposed for fully constrained cable robots, namely the controllable, wrench feasible, dynamic and force-closure workspaces. They are defined as the set of poses at which the mobile platform (or end-effector) can physically reach while all the cables have positive tension, and some additional constraints are met. In particular, the controllable workspace has been defined in [27] as the set of all poses at which the end-effector can statically balance a specific set of external wrench with all positive cable forces. The wrench feasible workspace [27] refers to the wrench set of poses that can balance a specified range of external wrenches with all positive cable tensions. Under-constrained and cable-suspended robots rely on gravity force. In a cable suspended parallel robot, the moving platform is suspended and operated by the attached cables that are connected to the base.
4 Simulations of a Case of Study
Modern architecture demands transparency, lightness and elegance and facade design with steel and glass is perfect to meet these requirements. Steel and glass constructions combine a modern glass aesthetics with a filigree, but stable statics and optimal structural properties. Thanks to innovative design solutions and ultra-modern manufacturing technologies, in the last two decades a wide variety of geometric shapes have been realized. Considering steel-glass structures, exceptionally large spans are possible, especially for large roofs [28]. As the two materials are often combined in the construction industry, steel and glass have been widely used in the roofs and facades of office buildings, residential buildings, and transport infrastructures.
As illustrative example, we have considered a steel glass structure, as it is shown in Fig. 3, in which the main dimensions are shown. Figure 4 shows a photo sequence of the simulation that has been carried out. A 4–4 CDPM has been considered, meaning a spatial suspended cable robot having 4 cables with 4 different attachment points at the end-effector.

An illustrative example for a steel-glass structure being inspected, in the scheme1) path, 2) tool, 3) fixed pulleys, 4) steel-glass structure, 5) horizontal surface, 6) vertical surface.

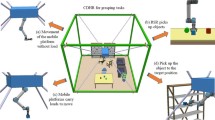
A photo sequence for the simulation of the operation for the CDPM applied to the steel-glass structure, configuration at: a) 0 s; b) 3 s; c) 4 s; d) 8 s: e) 12 s; f) 14 s.
The choice is to maximize the workspace below the end-effector. The disadvantage is not being able to control all the degrees of freedom of the system, but for monitoring applications we can use the positioning capability and using additional systems for orienting the tool, although it would be advisable to completely restrain the tool, for such irregularly shaped architectures is rather impossible to have multiple cables working in any directions.
The fixed attached points (fixed pulley in Fig. 3) are chosen conveniently taking advantage of the buildings in the surroundings. The actuation is mounted on the ground, cables are wound around drums, displayed in Fig. 5a), and they are rolled in and out thanks to the actuation systems. The cables are sent through suitable pulley mounted on top and displayed in Fig. 5b) to the end-effector tool, shown in Fig. 5c) and 5d). Figures 6, 7 and 8 shown numerical results for the simulation shown in Fig. 4.

Mechanical design for the CDPM: a) Pulleys; b) end-effector tool.

Numerical results for the simulation reported in Fig. 4: a) End-effector tool position; b) end-effector tool velocity components.

Numerical results for the simulation reported in Fig. 4: a) angular configuration for the four motors Mi; b) angular velocity of the four motors; c) cable lengths; d) angular acceleration of the four motors.

Numerical results for the simulation reported in Fig. 4: a) End-effector tool acceleration components in X and Y; b) End-effector tool acceleration normal and tangential components.
It is worth noting that the shape of the end-effector is designed according to the principles reported in [25] in order to simply the kinematic model and have better position capabilities. Realistic dimensions for the tool and commercial cables have been considered for the simulations. According to the overall dimensions and end-effector tool, simulations have been run neglecting the cable sagging effects.
Simulations have been carried out in CAD environment by using motion tool. The simulations are kinematics, indeed they refer to the positioning capability of the system.
The considered building has a complex shape, and it is planned to design a CDPM for inspection purposes, whose main scope is to carry a camera to take pictures, thermal images and/or point clouds thanks to a 3D scan, according to the information that is required. The systems must be eventually able to carry suitable end-effector for positioning sensors or cleaning, which would require an interaction between the end-effector and the structure. Having the possibility of using advanced tools for simulation and testing of the proposed solutions, it would be possible to realized advanced maintenance programs based on simulation results [29], as those reported in this paper. Realistic simulations can be very effective also for the development of Digital Twins related to real structures, in order to update and operate them, remotely, as described in [30, 31].
Future developments are related to the realization of more advanced cables’ model taking into account the mass and related sagging effects, and the possible interaction with the structure, simulating cleaning or maintenance. Cable modelling for realistic simulations of CDPM is still an open issue to be further explored, although some recent analytical models have been proposed by [32]. The proposed solution, although designed for a given case of study of monumental structure, can be properly applied to vertical surfaces, like building facades, for cleaning, painting, monitoring, placing smart sensors.
The use of CDPM is well suited because it allows placing the actuators conveniently, according to the needs and the shape of the structures. The use of additional cables and fully-constrained solutions allows better control of the tool.
5 Conclusions
In this paper, the design and simulation results for a large scale Cable-Driven Parallel Manipulator (CDPM) have been detailed. CDPM have attracted the attention of Academia and applied research for their features, mainly related to large span capabilities. Indeed, applications are increasing enormously, reaching inspection and monitoring of structures and infrastructures, when other types, conventional solutions, cannot be used. In this context, we have explored the possibility of applying such robot to the inspection and eventually maintenance of steel-glass structures, which are challenging because with very complex shapes. In this paper, the design and simulation results are shown for a realistic case of study referring to a complex shaped steel-glass structure, for which the inspection of the top roof is proposed. First results are shown, future work is related to the development of more advanced model, taking into account the sagging of the cables, and interaction between the end-effector tool and the top roof, simulating an operation of maintenance. Currently, a scaled prototype is under construction in laboratory environment to test the feasibility of the proposed approach and testing on the application for smart sensors positioning for monitoring structures and infrastructures.
References
Neitzel, R., Seixas, N., Ren, K.: A review of crane safety in the construction industry. Appl. Occup. Environ. Hyg. 16, 1106–1117 (2002). https://doi.org/10.1080/10473220127411
Acaccia, G.M., Michelini, R.C., Molfino, R.M., Razzoli, R.P.: Mobile robots in greenhouse cultivation: inspection and treatment of plants. In: Proceedings of ASER 2003, 1st International Workshop on Advances in Service Robotics, Bardolino (2003)
Habibian, S., Dadvar, M., Peykari, B., et al.: Design and implementation of a maxi-sized mobile robot (Karo) for rescue missions. Robomech J. 8, 1 (2021). https://doi.org/10.1186/s40648-020-00188-9
Schreckenghost, D., Fong, T., Milam, T., Pacis, E., Utz, H.: Real-time assessment of robot performance during remote exploration operations. In: 2009 IEEE Aerospace Conference (2009). https://doi.org/10.1109/AERO.2009.4839310
Rea, P., Pelliccio, A., Ottaviano, E., Saccucci, M.: The heritage management and preservation using the mechatronic survey. Int. J. Arch. Herit. 11(8), 1121–1132 (2017). https://doi.org/10.1080/15583058.2017.1338790
Rea, P., Ottaviano, E.: Functional design for customizing sit-to-stand assisting devices. J. Bionic Eng. 15(1), 83–93 (2018). https://doi.org/10.1007/s42235-017-0006-4
Bosscher, P., Williams, R., Bryson, L., Castro-Lacouture, D.: Cable-suspended robotic contour crafting system. Autom. Constr. 17(1), 45–55 (2007)
SkyCam (2023). https://www.spidercam.tv/
Idà, E., Marian, D., Carricato, M.: A deployable cable-driven parallel robot with large rotational capabilities for laser-scanning applications. IEEE Robot. Autom. Lett. 5(3), 4140–4147 (2020)
Schröder, S.: Under constrained cable-driven parallel robot for vertical green maintenance. In: Gouttefarde, M., Bruckmann, T., Pott, A. (eds.) CableCon 2021. MMS, vol. 104, pp. 389–400. Springer, Cham (2021). https://doi.org/10.1007/978-3-030-75789-2_31
Pott, A., Meyer, C.A.V.: Large-scale assembly of solar power plants with parallel cable robots. In: International Symposium on Robotics and German Conference on Robotics (2010)
Bock, T., Iturralde, K.: Automated and robotic process lifecycle of prefabricated facades. In: Neue Entwicklungen Im Betonbau, Beuth Verlag GmbH, pp. 117–129 (2019). ISBN: 978-3-410-29067-4
Ottaviano, E., Ceccarelli, M., De Ciantis, M.: A 4–4 cable-based parallel manipulator for an application in hospital environment. In: 15th Mediterranean Conference on Control and Automation – MED07, Athens (2007)
Castelli, G., Ottaviano, E., Rea, P.: A Cartesian cable-suspended robot for improving end-users’ mobility in an urban environment. Robot. Comput. Integr. Manuf. 30(3), 335–343 (2014)
Idà, E., Carricato, M.: Cable-Driven Parallel Robots, theoretical challenges and industrial applications (2020). https://i-rim.it/wp-content/uploads/2020/12/I-RIM_2020_paper_41.pdf
Iturralde, K., et al.: Cable-driven parallel robot for curtain wall module installation. Autom. Constr. 138, 104235 (2022). ISSN 0926-5805. https://doi.org/10.1016/j.autcon.2022.104235
Izard, J.-B., et al.: Large-scale 3D printing with cable-driven parallel robots. Constr. Robot. 1, 1–8 (2017). https://doi.org/10.1007/s41693-017-0008-0
Schlandt, M., Iturralde, K., Bock, T.: Robotic refurbishment of façades using textile. In: Proceedings of the CIB IAARC W119 CIC 2017 Workshop, Munich (2017)
Bugaj, M., Novak, A., Stelmach, A., Lusiak, T.: Unmanned aerial vehicles and their use for aircraft inspection. In: Conference: 2020 New Trends in Civil Aviation (NTCA), pp. 45–50 (2020). https://doi.org/10.23919/NTCA50409.2020.9290929
Bruzzone, L., Baggetta, M., Nodehi, S.E., Bilancia, P., Fanghella, P.: Functional design of a hybrid leg-wheel-track ground mobile robot. Machines 9, 10 (2021). https://doi.org/10.3390/machines9010010
Trebuňa, F., Virgala, I., Pástor, M., Lipták, T., Miková, L.: An inspection of pipe by snake robot. Int. J. Adv. Robot. Syst. 13 (2016). https://doi.org/10.1177/1729881416663668
Rea, P., Ottaviano, E.: Design and development of an inspection robotic system for indoor applications. Robot. Comput. Integr. Manuf. 49, 143–215 (2018)
Verhoeven, R.: Analysis of the workspace of tendon-based Stewart platforms, Ph.D. thesis, University of Duisburg-Essen (2004)
Pham, C.B., Yeo, S.H., Yang, G., Kurbanhusen, M.S., I-Ming, C.: Force-closure workspace analysis of cable-driven parallel mechanisms. Mech. Mach. Theory 41, 53–69 (2006)
Gonzalez-Rodriguez, A., Castillo-Garcia, F.J., Ottaviano, E., Rea, P., Gonzalez-Rodriguez, A.G.: On the effects of the design of cable-driven robots on kinematics and dynamics models accuracy. Mechatronics 43, 18–27 (2017). https://doi.org/10.1016/j.mechatronics.2017.02.002
Wischnitzer, Y., Shvalb, N., Shoham, M.: Wire-driven parallel robot: permitting collisions between wires. Int. J. Robot. Res. 27(9), 1007–1026 (2008)
Riechel, A., Ebert-Uphoff, I.: Wrench-based analysis of cable-driven robots. In: IEEE International Conference on Robotics and Automation, New Orleans, pp. 4950–4955 (2004)
Tahmasebinia, F., et al.: Advanced structural analysis of innovative steel-glass structures with respect to the architectural design. Buildings 11(5), 208 (2021). https://doi.org/10.3390/buildings11050208
Antosz, K., Jasiulewicz-Kaczmarek, M., Paśko, Ł., Zhang, C., Wang, S.: Application of machine learning and rough set theory in lean maintenance decision support system development. Eksploatacja i Niezawodność 23(4) (2021)
Leão, C.P., et al.: Web-assisted laboratory for control education: remote and virtual environments (2012). https://doi.org/10.1007/978-3-642-28816-6_7
Barros, C., Leão, C.P., Soares, F., Minas, G., Machado, J.: RePhyS: a multidisciplinary experience in remote physiological systems laboratory. Int. J. Online Eng. 9(SPL.ISSUE5), 21–24 (2013). https://doi.org/10.3991/ijoe.v9iS5.2756
Arena, A., Ottaviano, E., Gattulli, V.: Dynamics of cable-driven parallel manipulators with variable length vibrating cables. Int. J. Non Linear Mech. 151, 104382 (2023)
Acknowledgments
This work is a part of the research Project ERIS “Estensimetri nanocaricati collocati da Robot per Il monitoraggio delle Strutture monumentali” supported by LAZIO INNOVA (n. G09493 - PO FESR LAZIO 2014/2020).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2024 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Ottaviano, E., Rea, P. (2024). Design and Simulation of a Cable-Driven Parallel Manipulator for Monitoring and Inspection of Structures. In: Burduk, A., Batako, A.D.L., Machado, J., Wyczółkowski, R., Dostatni, E., Rojek, I. (eds) Intelligent Systems in Production Engineering and Maintenance III. ISPEM 2023. Lecture Notes in Mechanical Engineering. Springer, Cham. https://doi.org/10.1007/978-3-031-44282-7_11
Download citation
DOI: https://doi.org/10.1007/978-3-031-44282-7_11
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-44281-0
Online ISBN: 978-3-031-44282-7
eBook Packages: EngineeringEngineering (R0)