
Abstract
Wireless communication services have been in high demand, increasing the capacity of the system. Increasing bandwidth would be the most straightforward solution. However, the electromagnetic spectrum is becoming increasingly congested, making this a more and more challenging task. In this paper, we present a standard LMS algorithm that can detect taps based on NLMS and active detection. The proposed scheme takes advantage of refining the convergence rate and special filtering to reduce data transmission bandwidth requirements. The NLMS algorithm which is based on the frequency domain was simulated with a MATLAB simulator under multipath effects and multiple users. Comparing the results of the simulations with those of previous work suggests an improvement in the convergence rate, which leads to better efficiency of the system.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
The idea behind smart antennas is to increase the gain in a chosen direction to systematically improve wireless communication performance. The primary lobes of the antenna-beam patterns can be directed in the direction of the intended users to accomplish this. The radiation and/or reception pattern of a smart antenna system are automatically optimized in retort to the indication environment by combining several antenna rudiments with a signal processing capacity. The smart antenna system can automatically guide one or more nulls of the directivity pattern towards one or more sources of interference in addition to pointing the main lobe's direction in the direction of a selected user. Consuming a smart antenna system for a wireless system has several advantages, including greater coverage, better SNR and capacity, using less energy for equivalent performance, giving spatial diversity, etc. Long projected to perform significantly better than smart antenna systems [1, 2] Smart antennas need the Direction-of-arrival (DOA) algorithm to be able to determine upon arrival, the direction of the signal is determined and, consequently, aim the array beam in that direction with the help of adaptive beam shaping. Earlier work on DOA estimation typically fails to consider the mutual coupling between isotropic parts [3,4,5,6,7]. Systems of multiple inputs and outputs (MIMO) and smart antennas provide performance improvements over omnidirectional antennas as well as communication on 5G systems thanks to their advantages over omnidirectional antennas[8]. Various experimental works using directional antenna arrays and DOA algorithms, including Bartlett [9], MUSIC [10,11,12], and Matrix Pencil [11], are also available. The management of nonlinear adaptive smart antenna resources for 5G communications through surveillance systems was well described by Subha et al. [13]. A new technology called 5G evolution in mobile telecommunications can transmit data at a rate of about 10 Gbps. High-frequency waveforms with increased bandwidth are needed to achieve such high-speed data. 5G uses a technique called massive MIMO beam forming (BF) for providing higher frequency and it uses Millimeter Wave (mm). Printing antennas are integrated into a multifunctional composite structure called a skin antenna structure. An antenna structure embedded with fiber Bragg grating strain sensors is described in [14].
Using the same channel, smart antennas can broadcast (or take delivery of) several packets simultaneously in diverse beams. Nevertheless, transmission scheduling greatly affects network performance. There are two transmission scheduling schemes proposed to improve the throughput of networks and reduce transmission delays [15]. It takes into account communication restrictions and packet sizes as well as exploits parallel transmission opportunities to ensure network throughput is maximized and latency is minimized. Mobile ad hoc networks (MANETs) require DMAC tactics to overcome the restrictions caused by omnidirectional antennas. The overall MAC performance can be enhanced by a sectorized antenna approach and a frame scheduling mechanism [16]. Channel equalization is the major criterion in a communication channel. There is some research work proposed by Mohapatra et al. [17,18,19,20,21,22] on channel equalization problems.In this work, the purpose of this study is to examine how the frequency domain normalized LMS method is used for the identification of active taps and beam patterns for two white signals with three DOAs each.
The following is the organization of this paper. The smart antenna system describes in Sect. 2. Section 3 describes the NLMS and FDNLMS algorithms followed by active tap detection in Sect. 4. Simulation and conclusion describe in Sects. 5 and 6.
2 Smart Antenna Systems (SAS)
Among the various types of SAS are phased array, adaptive antenna systems, and digital beam shaping systems. However, switching beam or adaptive array systems are the typical classifications for smart antennas. Regarding the manner of operation, smart antennas may be categorized into two groups.
2.1 Switched Beam
Patterns with a fixed number of predefined and fixed parameterswithout channel feedback. Multi-beam systems with high sensitivity in desired directions are used in this system. As the mobile moves through the sector, the antenna switches from one beam to another depending on the signal strength. Rather than combining the output of multiple antennas into finely directional beams with more spatial selectivity than conventional, single-element approaches can, switched beam systems combine the output of multiple antennas to form finely directional beams with the metallic properties and physical design of a single element, as shown in Fig. 1.

Switch beam
2.2 Adaptive Array
Variable parameters, such as channel noise conditions, can modify this pattern in real time. The most advanced smart antenna approach is based on adaptive array antenna technology. The adaptive system uses an array of new signal-processing algorithms to dynamically minimize interference while maximizing intended signal reception by effectively locating and tracking various types of signals. The adaptive system provides optimal gain while simultaneously detecting, tracking, and minimizing interference while simultaneously identifying, tracking, and optimizing gain based on the location of the user. Figure 2 shows a main lobe that extends toward a co-channel interferer and a null pointing toward it.

Adaptive Array
Multiple fixed beams can be formed in some directions by switching beam antennas. A mobile device moving about a specific area can switch between a fixed, predefined beam and one of these antenna systems, which monitor signal strength. As a result, they create a static beam that becomes automatically controllable. A more efficient approach to locating and tracking signals is to use adaptive antenna technology, which relies on adaptive algorithms to dynamically reduce interference and improve signal reception. In this instance, the shaped beam is changeable and adjusts to the state of the broadcast channel with a dynamically changing weight array over time. In this situation, nodes estimate the DOA or AOA using the spatial structure. However, both systems make an effort to boost gain based on the user's location. The following graphic provides a summary of the fundamental SAS operation principle.

Principles of SAS operation
Figure 3 inputs \({s}_{1}\left(t\right), {s}_{2}\left(t\right),\dots \dots .{s}_{m}\left(t\right)\) are multiplied by elements of the weight vector \(\overline{w }={w}_{1}, {w}_{2}, \dots \dots {w}_{m}\) The output is y(t) and the error is e(t), and both are functions of discrete time t, a version of the algorithm using adaptive arrays is the only one that uses the adaptive algorithm. Switching beams can, however, be compared to not running an adaptive algorithm at all, since there is no weight array involved. SAS can be divided into several categories according to the type of created geometry pattern. The circular, hexagonal, and rectangular arrays are the most prevalent types. In contrast, antenna arrays in 5G technology must be adaptive and must be able to guide the key beam in the required path while directing the nulls in the unwanted interfering directions. When this adaptive mechanism is adjusted, the system's output will always attain the best signal-to-interference noise ratio [23]. An efficient and dynamic genetic algorithm was developed based on the received signal strength indicator (RSSI) of the node to find its optimal location value with the smallest localization error [24].
3 Normalized Least Mean Square Algorithm
The stability, convergence time and volatility of the LMS and step size is always determining factor in the adaptation process. The update step size can be effectively overcome by the normalizing variance of the input signal, \({\sigma }_{u}{(t)}^{2}\). Therefore, the following equation shows the weight update formula:
This results in the LMS algorithm's asymptotic performance being independent of the N number of taps, it has a significant impact on the convergence rate. Poorer convergence rates are the result of more taps.
3.1 Modified Form of LMS [25]
Figure 4 shows the suggested algorithm which is a modified form of LMS(FDLMS) with active taps detection. Adaptive processes and active tap detection make up the suggested approach. Active tap detection determines what taps need upgrading, while adaptive processes update tap weights.
Equation 1 can be modified to give the following weight update equation:
Here, the weight vector, and waveform of error are denoted as W(k), and e(k)respectively. The parameters μ, N are identified as step size, and the number of taps mentioned in the figure, whereas X(k) is used as FFT of the acknowledged signal.
The error is nothing but the difference between transmitted u(k) and received signal x(k) which also mentioned in Eq. (3).

LMS algorithm with frequency domain normalization
However, when there are a lot of adaptive taps, it is noted that the NLMS method has a poor convergence rate and high processing requirements. For mobile communication situations with extensive multipath components, this poses a serious issue because the numerous active taps needed could result in a lower convergence rate. To solve this issue, researchers suggested a detection-guided NLMS estimator. To distinguish between dynamic and sedentary sections or taps inside the channel is the function of the detection technique. We only need widely spaced elements since the taps or elements of a smart antenna correspond to various DOAs in the spatial domain to develop an NLMS algorithm in the spatial frequency domain, we propose to:
Here, the tap number is Aj(k), while tap j is the active tap. If the tap is active then Aj = 1, or else for an inactive tap Aj = 0.
4 Detection of Active Tap
The key to using the “active” tap detection method is figuring out if a certain unknown channel tap is active or not. Similar to research, this strategy is based in part on intuition. As was already noted, different DOAs correlate to various Smart Antenna elements or taps in the spatial domain. Using the active taps that match the required signal, we can then create an activity measure and to understand the unknown channel, we begin by assuming that it's linear, time-invariant, and stationery.
Here, the acknowledged signal is r(k), noise n(k) at sampling prompt k from the activity measure M. Now, we have
At sampling instant k, a measure of activity M is derived from a signal r(k) and noise n(k). Ѓ,
Finally, the spatial angle activity metric M is given by,
Here, the Ѓ is the discrete Fourier transform of γ.
Based on the following threshold, active and inactive taps can be distinguished.
Therefore, the jth tap at the instant k is active if, the threshold spread is controlled by this parameter.
The active tap detection which is based on FDNLMS is described in Fig. 5. A sample interval of k is measured separately in the array utilizing Eq. 10.
5 Simulation and Results
Based on the suggested algorithm (FDNLMS), we estimate its convergence rate, active tap number, and beam pattern. For those simulations with many multi-paths, each multipath experiences a variable gain, which incorporates both amplitude and phase components to recreate genuine mobile settings.
Receiving 2 signals with 3 DOA will allow us to evaluate the performance of the suggested algorithm critically. Figures 5 & 6 shows received signal error and beam pattern for white Signals with DOAsThe Smart Antenna system used for analysis is displayed in this choice. To maintain a level of accuracy, the following will be kept constant throughout all smart antenna simulations:
-
To imitate a transmitter delivering binary values, each of the 640 input signals has a signed value of 1 or -1.
-
Convergence parameter μ was taken as 0.006
-
400MHz is the carrier frequency, fc
-
Here, 0.84m is considered as the wavelength (λ)
-
A value of 0.375 is set for element spacing
Transmission to the first antenna element is delayed by 100 μs for simulations with a single transmitted signal, and 150 μs for simulations with a second transmitted signal.

Received Signal error for FDNLMS algorithm, with α = 0.1
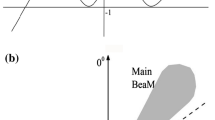
Figure 6 illustrates four beam patterns from both signals, with the third multipath pattern having two lobe-like projections pointing in the right direction for the second and third multipath. Figure 6 describes different Beam patterns for FDNLMS, α = 0.1 with respect to DOA’s of signal 1 and signal 2. Figure 7 shows FDNLMS-based active tap detection with respect to DOA’s of signal 1 and signal 2.

Beam patterns for FDNLMS, α = 0.1,

Number of active taps for proposed algorithm, α = 0.1
6 Conclusions
The idea of smart antenna systems and how they affect mobile communication networks has been effectively discussed in this research. This paper analyses active tap detection, beam pattern, and signal error of two signals. Our goal was to develop an algorithm for Smart Antenna systems that integrates frequency domain normalized LMS algorithms. The proposed activity threshold for the detection-guided FDNLMS algorithm, however, yields a variety of results. The system's performance is considerably hampered by the narrower threshold levels, although it exhibits noticeably quick convergence rates and reduced computational cost.
References
Alexiou, A., Haardt, M.: Smart antenna technologies for future wireless systems: trends and challenges. IEEE Commun. Mag. 42(9), 90–97 (2004)
Boukalov, A.O., Haggman, S.G.: System aspects of smart-antenna technology in cellular wireless communications-an overview. IEEE Trans. Microw. Theory Tech. 48(6), 919–929 (2000)
Karim, D.A., Mohammed, J.R.: Strategies for selecting common elements excitations to configure multiple array patterns. Prog. Electromagnet. Res. C, 118, 135–145 (2022)
Li, R., Shi, X., Chen, L., Li, P., Xu, L.: The non-circular MUSIC method for uniform rectangular arrays. In: 2010 International Conference on Microwave and Millimeter Wave Technology, pp. 1390–1393. IEEE (2010)
Jin, L., Wang, H.: Investigation of different types of array structures for smart antennas. In: 2008 International Conference on Microwave and Millimeter Wave Technology, vol. 3, pp. 1160–1163. IEEE (2008)
Aboumahmoud, I., Muqaibel, A., Alhassoun, M., Alawsh, S.: A review of sparse sensor arrays for two-dimensional direction-of-arrival estimation. IEEE Access 9, 92999–93017 (2021)
Bo, W.: Realization and simulation of DOA estimation using MUSIC algorithm with uniform circular arrays. In: The 2006 4th Asia-Pacific Conference on Environmental Electromagnetics, pp. 908–912. IEEE (2006)
Kayithi, A., et al.: Design and simulation of smart planar array antenna for sub (6 GHz) and 5G applications. In: 2022 International Conference on Communication, Computing and Internet of Things (IC3IoT), pp. 1–4. IEEE (2022)
Abusultan, M., Harkness, S., LaMeres, B.J., Huang, Y.: FPGA implementation of a Bartlett direction of arrival algorithm for a 5.8 GHZ circular antenna array. In: 2010 IEEE Aerospace Conference, pp. 1–10. IEEE (2010)
Mustafa, I.A.Y.: Energy Efficient Switched Parasitic Array Antenna For 5G Network and lot (Doctoral dissertation) (2022)
Hirata, A., Taillefer, E., Yamada, H., Ohira, T.: Handheld direction of arrival finder with electronically steerable parasitic array radiator using the reactance-domain MUltiple signal classification algorithm. IET Microwaves Antennas Propag. 1(4), 815–821 (2007)
Kong, D., Li, X., Ren, X., Gao, S.: A smart antenna array for target detection. In: WSA 2021, 25th International ITG Workshop on Smart Antennas, pp. 1–5. VDE (2021)
Subha, T.D., Perumal, C.A., Subash, T.D.: Nonlinear adaptive smart antenna resource management for 5G through to surveillance systems. Mater. Today: Proc. 43, 3562–3571 (2021)
Zhou, J., Cai, Z., Kang, L., Tang, B., Xu, W.: Deformation sensing and electrical compensation of smart skin antenna structure with optimal fiber Bragg grating strain sensor placements. Compos. Struct. 211, 418–432 (2019)
Chang, C.T., Chang, C.Y., Wang, T.L., Lu, Y.J.: Throughput enhancement by exploiting spatial reuse opportunities with smart antenna systems in wireless ad hoc networks. Comput. Netw. 57(13), 2483–2498 (2013)
De Rango, F., Inzillo, V., Quintana, A.A.: Exploiting frame aggregation and weighted round robin with beamforming smart antennas for directional MAC in MANET environments. Ad Hoc Netw. 89, 186–203 (2019)
Kumar Mohapatra, P., et al.: Application of Bat algorithm and its modified form trained with ANN in channel equalization. Symmetry 14(10), 2078 (2022)
Acharya, B., Parida, P., Panda, R.N., Mohapatra, P.K.: A novel approach for BOA trained ANN for channel equalization problems. J. Inf. Optim. Sci. 43(8), 2121–2130 (2022)
Mohapatra, P.K., Rout, S.K., Bisoy, S.K., Sain, M.: Training strategy of Fuzzy-Firefly based ANN in non-linear channel equalization. IEEE Access 10, 51229–51241 (2022)
Mohapatra, P.K., Rout, S.K., Panda, R.N., Meda, A., Panda, B.K.: Performance analysis of fading channels in a wireless communication. In: Innovations in Intelligent Computing and Communication: First International Conference, ICIICC 2022, Bhubaneswar, Odisha, India, 16–17 December 2022, Proceedings, pp. 175–183. Springer, Cham (2023). https://doi.org/10.1007/978-3-031-23233-6_13
Mohapatra, P.K., Panda, R.N., Rout, S.K., Samantaroy, R., Jena, P.K.: A novel application of HPSOGWO trained ANN in nonlinear channel equalization. In: Proceedings of the 6th International Conference on Advance Computing and Intelligent Engineering: ICACIE 2021, pp. 159–174. Springer, Singapore (2022). https://doi.org/10.1007/978-981-19-2225-1_15
Mohapatra, P.K., Panda, R.N., Rout, S.K., Samantaroy, R., Jena, P.K.: A novel cuckoo search optimized RBF trained ANN in a nonlinear channel equalization. In: Proceedings of the 6th International Conference on Advance Computing and Intelligent Engineering: ICACIE 2021, pp. 189–203. Springer, Singapore (2022). https://doi.org/10.1007/978-981-19-2225-1_18
Mohapatra, P., Sahu, P.C., Parvathi, K., Panigrahi, S.P.: Shuffled frog-leaping algorithm trained RBFNN equalizer. Int. J. Comput. Inf. Syst. Ind. Manag. Appl. 9, 249–256 (2017)
Rout, S.K., Mohapatra, P.K., Rath, A.K., Sahu, B.: Node localization in wireless sensor networks using dynamic genetic algorithm. J. Appl. Res. Technol. 20(5), 520–528 (2022)
Haykin, S.S.: Adaptive Filter Theory. Pearson Education India, Noida (2002)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Mohapatra, P.K., Rout, S.K., Panda, R.N., Gupta, N., Swain, N.K. (2023). Performance Analysis of Smart Antenna in Wireless Communication System. In: Chaubey, N., Thampi, S.M., Jhanjhi, N.Z., Parikh, S., Amin, K. (eds) Computing Science, Communication and Security. COMS2 2023. Communications in Computer and Information Science, vol 1861. Springer, Cham. https://doi.org/10.1007/978-3-031-40564-8_19
Download citation
DOI: https://doi.org/10.1007/978-3-031-40564-8_19
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-40563-1
Online ISBN: 978-3-031-40564-8
eBook Packages: Computer ScienceComputer Science (R0)