
Abstract
This paper presents a procedure to calculate the characteristic value of braking forces of road bridges using monitored data and stochastic simulation. In the model, the braking force is a random variable characterized by a probability distribution. In addition to the properties of the bridge such as length, number of lanes, as well as stiffness and damping in longitudinal direction, the model also takes into account all essential stochastic variables that characterize a braking process. That is the composition of the traffic as a temporal sequence of vehicles, the weight of heavy vehicles according to vehicle type, the individual reaction time of the respective vehicle driver, the individual deceleration of each vehicle involved in the braking process and the probability of the occurrence of a braking process. All model parameters of these variables were characterized with traffic data monitored on Swiss motorways (automatic vehicle counting and weigh-in-motion stations) and data from naturalistic driving studies. Parameter studies with the simulation model show that the braking force strongly depends on the bridge length, the fundamental frequency of the bridge in longitudinal direction, the spontaneous clustering behavior of heavy vehicles, the frequency of hard braking events, and the return period. Since the return period is explicitly included in the model as a parameter, the model can be used for both the design of new and the assessment of existing bridges.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
- road bridges
- braking force
- traffic data
- naturalistic driving studies
- dynamic amplification
- Monte Carlo simulation
1 Introduction
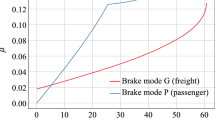
The characteristic values of braking force in Swiss structural codes have significantly increased since their first introduction more than 50 years ago (Fig. 1a). While before completely neglected, the code SIA 160 introduced for the first time in 1970 [1] braking forces (characteristic values) that achieved a maximum of 300 kN for bridges longer than 100 m. This code model was applied for more than 30 years and was replaced in 2003 by the code model of SIA 261 [2], which was substantially based on the Eurocode model [3]. In this model, the braking force exceeded the maximum of the old code model for all bridges and achieved a maximum of 900 kN for bridges longer than 200 m.
While the SIA 261 model was intended for new bridges, for the assessment of existing bridges, the code SIA 269/1 (introduced in 2011, [4]) reduced the braking forces to a maximum was 600 kN that represented the average between the maxima of the SIA 160 and SIA 261 models. Considering that approximately 90% of the motorway bridges in Switzerland were set in operation applying the code model of SIA 160 (Fig. 1b), these bridges have been designed for a braking force that is approximately 50% the one being required for existing structures.

a) Braking force models of Swiss codes. b) Increase in bridges on the Swiss motorway network (100% refers to the year 2020).
Due to a complete lack of experimental data, the characteristic value of braking forces in the Swiss codes and Eurocode have been determined with a deterministic model that does not consider the aleatory nature of the phenomena [5]. As a result, the return period of the characteristic value as well as the probability of failure due to braking forces is unknown. Therefore, there is a significant uncertainty concerning the safety margin of existing bridges.
In order to increase the efficiency of maintenance measures and in particular to avoid bridge damages including traffic interruptions and unnecessary, costly retrofitting measures, FEDRO (Swiss Federal Roads Office), the authority responsible for the national road infrastructure in Switzerland, supported research projects to estimate braking force on road bridges on a more empirical basis. Similar to vertical traffic forces [6], the aim was to estimate the characteristic value of braking forces with a stochastic model that heavily rely on traffic data monitored on Swiss motorways and data of instrumented vehicles.
2 Stochastic Model
2.1 Overall Procedure
The stochastic model to compute the characteristic value of the braking force is composed of four parts, each one addressing a different aspect. The first part addresses the traffic and models it as a sequence of vehicles (traffic configuration) representing the traffic characteristics of a specific location of the road network. This traffic configuration must consist of light as well as heavy vehicles because light vehicles influence the braking kinematics of the traffic configuration. Each vehicle is characterized by speed, length, weight, and distance to the front vehicle.
The second part models the braking kinematics of a subset of the traffic configuration (traffic scenarios). It starts by attributing randomly a deceleration time history (deceleration profile) to the leading vehicle, which can be a light or heavy vehicle. For each following vehicle, a driver reaction time and a deceleration profile are assigned. The reaction time is randomly generated reflecting both the distance between consecutive vehicles and the speeds of the vehicles. To consider the different braking performance, different deceleration profiles are assigned to heavy and light vehicles. Furthermore, the assignment is performed so that vehicles neither collide nor drivers overreact. Afterwards, the horizontal component of the driving force transmitted by braking vehicles to the bridge deck is computed considering the vehicles’ masses, the deceleration profiles, and the positions of the vehicles in each instant. The position of the vehicles is considered to make sure that the force transmitted to the bridge deck occurs only if the vehicle is at least partly on the bridge. If a vehicle is entirely outside of the bridge, the driving force is equal to zero.
In the third part, the sum over time of the driving force transmitted by braking vehicles to the bridge deck is applied as excitation force for determining the dynamic response of the bridge. A simple linear elastic and viscously damped single degree oscillator is used to model the bridge’s longitudinal behavior. This simplification is based on the assumptions that the longitudinal stiffness of the bridge deck is sufficiently high enough to be modelled as a rigid body and the possible nonlinearity of the longitudinal vibration of the bridge induced by bearings, piers and non-structural components is small.
In the last part, a Monte Carlo Simulation is performed with ten thousands of traffic scenarios to generate an empirical probability distribution of braking forces. In each traffic scenario, the braking force is given by the peak force of the oscillator's response, which corresponds to the peak force that is transferred by the piers and bearings to the ground. Finally, the last stage of the stochastic model evaluates the characteristic value of the braking force associated to a given return period. Since the characteristic value is always located in the upper tail of the probability distribution of the braking force, the numerical implementation uses several strategies to reduce computational time. A detailed description of the stochastic model is found in [7].
2.2 Traffic Data
The computation of traffic configurations on motorways is founded on a quite solid database. FEDRO operates eight weigh-in-motion (WIM) installations and more than 300 Swiss Automatic Road Traffic Count (SARTC) stations. WIM stations are equipped with inductive loop sensors and a piezo-elastic WIM sensor while SARTC stations are only equipped with inductive loop sensors. WIM installations record exclusively heavy vehicles (weight greater than 3.5 t) while SARTC stations record both light and heavy vehicles. In principle, WIM stations are able to record also light vehicles. However, the operator decided to restrict the recording to heavy vehicles in order to reduce the data size. WIM and SARTC stations record common data such as vehicle arrival date and time, vehicle class (Swiss 10 classification), vehicle speed, vehicle length, driving direction and lane. In addition, WIM stations record the number of axles, axle weights, and inter-axle distances of heavy vehicles.
Since WIM stations record only heavy vehicles, constructing traffic configurations requires fusing the data from WIM as well as SARTC stations. In addition, since WIM and SARTC stations share not the same location, in order to represent the same traffic situations, fusing such data requires that the stations are not too far away from each other. Even in such cases, however, WIM and SARTC stations provide inconsistent data concerning heavy vehicles. Table 1 displays the number of heavy vehicles on two locations subdivided into vehicle classes during a period of four weeks. Class 8 refers to trucks, class 9 to trucks with trailer, and class 10 to articulated trucks. SARTC stations generally record more heavy vehicles than WIM stations. Concerning the estimation of braking forces, consistency between both data sets is important for these classes, because their number, length, speed as well as their distance to the foregoing vehicle are key parameters that influence braking forces. The exceedance of SARTC stations is particularly strong for class 8 vehicles (simple trucks). A detailed analysis shows that SARTC stations confuse class 8 with class 5 vehicles (delivery van or small trucks). This incorrect classification is due to the similarity of the vehicles, which generates a similar induction loop footprint, and to a rigid length criterion for classification that assigns class 8 to each vehicle exceeding 7.5 m independently of the vehicle speed. In fact, a comparison of class 8 vehicles between WIM and SARTC stations shows that the exceedance of SARTC stations is concentrated on vehicles up to 8.5 m and with a speed faster than 90 km/h (Fig. 2). Therefore, for class 8 vehicles, consistency between WIM and SARTC stations data can be achieved by classifying too fast class 8 vehicles as class 5 vehicles in SARTC station data. Generally, the WIM data has been considered more reliable and the SARTC data was updated to agree statistically to the WIM data.
Table 1 shows that the composition of heavy vehicles is very different between the two locations. Denges/Préverenges represent the east-west domestic traffic and Monte Ceneri the north-south international traffic. In domestic traffic, class 8 vehicles (trucks) have the relative majority of heavy vehicles while in international traffic class 10 vehicles (articulated trucks) dominate over the other heavy vehicle types. Considering the weight flux associated to vehicles classes, the dominance of class 10 vehicles is with more than 60% of total mass flux even more pronounced.

Histograms of speed (a) and length (b) of class 8 vehicles of WIM and SARTC stations at Denges/Préverenges.
An additional parameter that influences braking forces is the spontaneous clustering of heavy vehicles. A quite common observation on motorways is that heavy vehicles tend to form spontaneous convoys. If such convoys are involved into a braking event braking force is likely to be high depending of the vehicles’ weights and speeds and the distances between the vehicles. Fig. 3a displays the number of trucks that are travelling as single vehicle and as a convoy composed of two or more vehicles on an average working day at Monte Ceneri. For most of the time, vehicles travelling in a spontaneous convoy are equal or more than vehicles travelling alone. Convoys of two vehicles occur more often (Fig. 3b) than convoys composed of three or more vehicles. Nevertheless, convoys of four and five vehicles are still rather common.

Number of trucks in convoys (a) and number of convoys (b) of an average working day at Monte Ceneri (2017).
2.3 Rate of Braking Events
While in the case of vertical loads, traffic data provides all the information needed to estimate its characteristic value, braking forces require an additional parameter, which describes how often braking events occur [8]. The rate of braking events is of paramount importance for estimating the characteristic value of braking forces. In fact, the more likely are braking events the greater are braking forces. An adequate definition of braking rate is the likelihood that a vehicle will engage in a hard braking event per travelled unit distance (e.g. 1 m). Clearly, in such a definition the term hard braking needs to be quantified. This quantification can be done in different ways. The most common is by setting a deceleration threshold that has to be exceeded during a braking event. Clearly, the higher the threshold the smaller the likelihood of hard braking events. However, if this threshold is too high, the number of braking events in the data may be too small to be statistically reliable. On the other side, if the threshold is too small, there is likely to incur into a waste of computational time analyzing the data and simulating braking events that are not relevant for safety assessment. Furthermore, the chosen threshold should have little influence on the characteristic value of the braking force for any return period.
Unfortunately, the data basis for estimating the braking rate is not as good as for describing the traffic. Data generated by on-road traffic studies with instrumented vehicles provide information of hard braking events. The first large scale on-road traffic study was the 100-Car Naturalistic Driving Study described in [9], which collected data from 100 light vehicles covering a total of 3.3 MVKT (million vehicle kilometers travelled). Using a deceleration threshold of 4 m/s2 a rate of braking events of 7.1 × 10–8 (veh·m)−1 was estimated. In this study, events were defined as situations requiring braking or steering to avoid crashing.
In another on-road traffic study, Olson et al. [10] investigated driver distraction of commercial vehicles with data covering approximately 5 MVKT. The analyzed events comprise crash, near crash and other crash relevant events. One of the parameters used to identify events was a deceleration higher than 2 m/s2, but swerving or activating a critical incident was also considered. A rate of events of 6.5 × 10–7 (veh·m)−1 was finally computed. This value is about ten times higher than the rate of the 100-Car study, since it classifies other events than just hard braking events.
Martin et. al. [7] describes a method to estimate hard braking rates from part of the data of the Dutch AOS study [11] on accident prevention. Each vehicle’s dataset contained:
-
Minimum, mean and maximum speeds over two-minute intervals;
-
Minimum and maximum accelerations over two-minute intervals;
-
Travelled distance covered over two-minute intervals;
-
GPS coordinates every minute.
Identifying a minimum acceleration with an amplitude greater than 4 m/s2 as hard braking event provided a statistically reliable data set. However, the exact locations of these braking events are imprecise, which could impair the classification according to road hierarchy. Furthermore, the coarse time resolution may affect the evaluation of the proximity of the vehicle to an infrastructure constraint at the time of braking. The aim was to evaluate the rate of braking events on a road section free of constraints such as traffic lights, stop signals, pedestrian crossings, sharp curves, etc. This definition was supposed to reflect situations that are most likely to occur on the location of road bridges.
A supervised learning classification algorithm was developed to compute the distance travelled per road type (motorway, regional and local roads). It predicts the road type using only the speed profile of a truck [7]. Following a metaheuristic procedure, the algorithm was trained using 500 instants from the data set (134 instances of motorway, 225 regional roads and 141 local roads). The performance of the algorithm was good achieving a likelihood of more than 80% for correctly identifying motorways and local roads and more than 75% for correctly identifying regional roads. With this information and a matching categorization of braking events, it was possible to estimate a braking probability on motorways of approximately 7 × 10–7 and on regional roads of approximately 5.5 × 10–6.
3 Results
A typical result of the stochastic model is displayed in Fig. 4. It shows the characteristic value of the braking force at the locations Denges/Préverenges and Monte Ceneri for a return period of 1000 years, which corresponds to the return period of new bridges. In each plot, the curve represents the average value of three Monte Carlo simulations while the markers represent the results of each Monte Carlo simulation. The different colored areas show the number of heavy vehicles that determine the value of the characteristic braking force. In this context, the term bridge length means a part of the bridge superstructure between two joints that permits its unconstrained motion.

Characteristic value of the braking force for the locations Denges/Préverenges (a) and Monte Ceneri (b).
In both locations, the braking force increases rapidly for bridges shorter than 50 m. With increasing bridge length, the slope diminishes continuously and vanishes at length greater than 350 m. In general, given a constant rate of hard braking events, the observed increase of braking force with bridge length is because the number of hard braking events increases with increasing bridge length. More events means that the likelihood to have a very heavy truck performing a very hard braking increases. This fact, the high rate of single trucks in heavy traffic and the increasing likelihood of having several axes of a truck braking simultaneously with increasing bridge length explain the rapid increase at very short bridges. For longer bridges (and shorter than 100 m), two simultaneously braking trucks are determining the braking force. The likelihood to have two very heavy trucks performing a very hard braking is less likely and therefore the slope diminishes. This observation applies also to long bridges involving three or more simultaneous braking heavy vehicles. The effect is to further reduce the slope until a saturation is achieved.
In Fig. 4, when several vehicles determine the characteristic value, the braking force at Denges/Préverenges is smaller than at Monte Ceneri. At Denges/Préverenges the number of heavy vehicles determining the characteristic value is limited to three also for long bridges. Meanwhile, at Ceneri, the number of heavy vehicles is four or even five. At Denges/Préverenges two vehicles determine the braking force up to a bridge length of 125 m while at Monte Ceneri the braking force of a bridge of 90 m is already determined by three vehicles. This result is due to the higher clustering rate of heavy vehicles at Monte Ceneri in comparison to Denges/Préverenges. Higher clustering rate means that the likelihood of several simultaneously hard braking vehicles is higher thus generating greater braking forces. At Denges/Préverenges, the increase observed for braking events with three vehicles is solely due to the increasing number of braking events with increasing bridge length and is therefore smaller than when 4 or more vehicles are involved.

Impact of natural frequency on characteristic value of the braking force (Denges/Préverenges).
As mentioned before, braking vehicles induce a dynamic motion of the bridge that amplify the force transmitted by the vehicles because of the inertial force of the bridge (dynamic amplification). Aiming a simplification, braking force model in codes are independent of the dynamic properties of the bridge. In the background studies of EC1-2 dynamic amplification factor (DAF) up to 1.8 are considered [6]. However, such a high value of DAF is not likely to occur, as displayed in Fig. 5, which plots the characteristic value of braking force for different natural frequencies of the longitudinal vibration mode.
Braking force increases with decreasing natural frequency. The braking force for a natural frequency of 10 Hz corresponds essentially to a bridge with a rigid support in longitudinal direction. In this case, no dynamic amplification occurs and the braking force is equal to the maximum force transferred by the vehicles to the bridge deck. The smaller dynamic amplification compared to the code is because in the code model the action of the vehicles rises instantaneously (ideal impact force). This assumption is conservative, because in practice, even at very hard braking the gradient of the deceleration profile of heavy vehicles is finite [12]. In addition, it is very unlikely that in real-life circumstances, the braking of several vehicles induces resonance phenomena. With smaller natural frequencies, however, the rising of vehicle's action approaches the sudden rising of an ideal impact force so that the dynamic amplification increases.
Figure 6 compares the characteristic value of the braking of Swiss codes with the estimation for the location Denges/Préverenges. For all bridge lengths, the braking force is significantly greater than the force of the code SIA 160. This means that the majority of motorway bridges in Switzerland have been designed for a braking force smaller than the one that may occur during their lifetime. However, as was demonstrated with tests, such bridges may still have an acceptable performance [12]. The code model for existing bridges (SIA 269/1) fits reasonably well with the braking force of the stochastic model. Since short bridges are usually not designed with floating articulation, the lower bound of the stochastic model applies. The code model tends to underestimate the braking force, of long bridges with low natural frequency. Comparing Fig. 4b, it is evident that at the location Monte Ceneri the braking force of long bridges estimated by the stochastic model exceeds substantially the braking force of the code SIA 269/1.

Comparison of characteristic value of the braking in codes in Denges/Préverenges.
4 Conclusions
When assessing existing bridges, inspection, testing, and monitoring provide qualitative as well as quantitative data for characterizing the state and performance of a bridge. This information is bridge specific and may change significantly from bridge to bridge. However, an assessment requires also information about the actions. Using action models of structural codes does not account for the specific situation of a particular bridge and reduces the effectiveness of the assessment and possibly of the maintenance activity. This paper has demonstrated that the usage of traffic data and data recorded on instrumented vehicles combined with stochastic simulations allows designing the action for a specific bridge. However, the quality of this action depends very much on the quality of data. Since the data concerning the braking of heavy vehicles is still scarce, further investigations are necessary to improve data quality and, consequently, the quality of the estimated braking forces. Since modern heavy vehicles are instrumented with many sensors, the availability of such data may in the future allow improving the knowledge about traffic action on bridges.
References
Schweizerischer Ingenieur- und Architektenverein SIA: Norm für die Belastungsannahmen, die Inbetriebnahme und Überwachung der Bauten, Norm SIA 160 (1970)
Schweizerischer Ingenieur- und Architektenverein SIA: Einwirkungen auf Tragwerke, Norm SIA 261 (2003)
EN 1991-2:2003: Eurocode 1: Actions on structures - Part 2: Traffic loads on bridges. CEN, European Committee for Standardization: Brussels (2003)
Schweizerischer Ingenieur- und Architektenverein SIA: Erhaltung von Tragwerken - Einwirkungen, Norm SIA 269/1 (2011)
Merzenich G, Sedlacek G. Hintergrundbericht zum Eurocode 1 - Teil 3.2: Verkehrslasten auf Straßenbrücken. Bundesminister für Verkehr, Abt. Straßenbau: Bonn-Bad Godesberg, Germany (1995)
Bailey, S.: Basic principles and load models for the structural safety evaluation of existing road bridges. Lausanne, EPF Lausanne. PhD: 187 (1996)
Martins, J., Feltrin, G.: Updated braking forces for the assessment of road bridges, Bundesamt für Strassen, Bern (2016). https://www.mobilityplatform.ch/de/research-data-shop/product/704
Martins, J., Fénart, M.-A., Feltrin, G., Dumont, A.-G., Beyer, K.: Deriving a load model for the braking force on road bridges: comparison between a deterministic and a probabilistic approach. In: Caner, A., Gülkan, P., Mahmoud, K. (eds.) Developments in International Bridge Engineering. STTT, vol. 9, pp. 27–39. Springer, Cham (2016). https://doi.org/10.1007/978-3-319-19785-2_3
Dingus, T.A., et al.: The 100-Car Naturalistic Driving Study, Phase II – Results of the 100-Car Field Experiment. Report No. DOT HS 810 593. National Highway Traffic Safety Administration, Washington, DC, USA (2006)
Olson, R.L., Hanowski, R.J., Hickman, J.S., Bocanegra, J.: Driver Distraction in Commercial Vehicle Operations. Report No. FMCSA-RRR-09-042. U.S. Department of Transportation, Washington, D.C., USA (2009)
Wiki, Fot-Net: AOS. http://wiki.fot-net.eu/index.php?title=AOS. Accessed 1 Nov 2023
Feltrin, G., Breveglieri, M.: Dynamic tests with hard braking heavy vehicles on a motorway bridge. In: EVACES 2023 (Experimental Vibration Analysis for Civil Engineering Structures), Milan, Italy (2023)
Acknowledgments
The research work was financed through a grant by the Federal Roads Office in Switzerland to project AGB 2011-003. This contribution is gratefully acknowledged.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Breveglieri, M., Feltrin, G. (2023). Determining Braking Forces on Bridges Using Monitored Traffic Data and Stochastic Simulation. In: Limongelli, M.P., Giordano, P.F., Quqa, S., Gentile, C., Cigada, A. (eds) Experimental Vibration Analysis for Civil Engineering Structures. EVACES 2023. Lecture Notes in Civil Engineering, vol 433. Springer, Cham. https://doi.org/10.1007/978-3-031-39117-0_11
Download citation
DOI: https://doi.org/10.1007/978-3-031-39117-0_11
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-39116-3
Online ISBN: 978-3-031-39117-0
eBook Packages: EngineeringEngineering (R0)