
Abstract
An accurate calculation of steel stresses is essential for assessing reinforced concrete structures’ serviceability limit state, e.g., assessing crack widths. The steel stresses in elements loaded in bending are not known but are estimated by steel stress calculations. To get a more accurate crack width prediction, the calculated steel stress should approximately represent the actual steel stress at the location of the crack after the crack has been formed. Existing methods for calculating steel stresses are frequently based on numerous assumptions; e.g., the tensile stresses or tension softening effects in the cross-section are neglected, and a linear stress-strain distribution is assumed for the concrete in compression. This paper presents a method to calculate steel stresses based on existing constitutive theoretical relations that consider concrete's non-linear behaviour in compression and tension. They are compared with strain measurements of the reinforcement bars using distributed optical fiber sensors obtained from experiments described in the literature. Results showed that existing methods frequently overestimated the steel stress, especially when the first cracks were formed. Therefore, a method was developed for an improved calculation of steel stresses in elements loaded in bending with a rectangular cross-section. The paper demonstrated that the developed method could estimate steel stresses more accurately from the first to the final crack. The presented method applies to rectangular cross-sections with a single reinforcement layer but can be straightforwardly extended to other shapes in a similar procedure and can be used to assess the accuracy of crack width formulations based on experimental results.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
An accurate description of crack widths \(w\) is essential to check if crack width limits \(w_{{{\text{lim}}}}\) for ingress rates are met [1–3]. The values of \(w\) can be calculated by crack width formulations, e.g., as described in EN1992–1-1 [4]. In these formulations, an important parameter is the steel stress \(\sigma_{{\text{s}}}\), at the location of the considered crack [5]. \(\sigma_{{\text{s}}}\) can readily be obtained for elements subjected to a pure tension force with symmetric reinforcement since the strain over the height \(h\) of the cross section is uniform, leading to an equal force distribution in the reinforcement. However, obtaining an accurate value for \(\sigma_{{\text{s}}}\) for elements loaded in bending, is more complex than for the pure tension case, since the non-linear behavior at the compressive side of the element and the tension softening part of the cracked section partly determine the internal force distribution in the concrete [6]. Therefore, numerous methods were developed based on simplifications to estimate \(\sigma_{{\text{s}}}\) at the location of a crack, denoted as \(\hat{\sigma }_{{\text{s}}}\) [7–9]. The methods frequently assume a linear-elastic behaviour of concrete in compression and neglect the contribution of concrete in tension [10], leading to an overestimation of \(\sigma_{{\text{s}}}\), especially for the stage when the first cracks in the element are developing. This can lead to an overestimation of crack widths, which results in a higher reinforcement ratio \(\rho\), thus increasing costs. Moreover, a comparison between various crack width formulations shows that the influence of \(\hat{\sigma }_{{\text{s}}}\) on the crack width varies [5, 11]. To conclude, a workflow and method are needed to accurately estimate these steel stresses in reinforced concrete elements loaded in bending.
The goal of this paper is to develop a method to calculate \(\sigma_{{\text{s}}}\) for the entire cracking process for elements loaded in bending. First, a short literature review discusses various methods for calculating \(\sigma_{{\text{s}}}\). Then, a new semi-analytical approach is presented, including concrete's non-linear compression and tension softening behaviour, based on existing constitutive relations. Afterwards, the model is validated based on existing experiments using distributed optical fiber sensors (DOFs). Finally, the paper discusses how the results can be used for further research and how they can be improved.
2 Methods for Calculating \({\varvec{\sigma}}_{{\mathbf{s}}}\) in Elements Loaded in Bending
2.1 Assuming a Triangular Compression Zone
Frequently, \(\hat{\sigma }_{{\text{s}}}\) is calculated based on equilibrium equations. The concrete compression zone \(x_{{\text{c}}}\), in the case of a rectangular cross-section with a single layer of reinforcement, is often derived analytically, based on horizontal equilibrium and under the assumption of a triangular shape of the compression zone [7]. The triangular shape follows from the assumption that plane sections remain plane, and a linear stress-strain relation is adopted for concrete in compression. The formula for \(x_{{\text{c}}}\) based on these assumptions is given by
where \(d\) is the working height, \(\rho\) the longitudinal reinforcement ratio and \(\alpha_{{\text{e}}} = E_{{\text{s}}} /E_{{\text{c}}}\), where \(E_{{\text{s}}}\) denotes the modulus of elasticity of the reinforcement steel. In this paper, the short-term modulus of elasticity of concrete \(E_{{\text{c}}}\) is used since it coincides with adopted constitutive relations later in this paper that also make use of the short-term \(E_{{\text{c}}}\). \(\hat{\sigma }_{{\text{s}}}\), at the location of a crack, can be calculated as
where \(M_{{{\text{ext}}}}\) denotes the applied bending moment and \(A_{{\text{s}}}\) the reinforcement area. Equations (1) and (2) are based on the assumptions of a rectangular cross-section, the presence of pure bending, the neglection of tensile stresses in the concrete below the neutral axis, and an evenly distributed tensile force over the various reinforcement bars, having a single layer of reinforcement. Van der Schrier [7] derived Eqs. (1) and (2); therefore, in this paper, the method based on these equations is called the Schrier method.
2.2 Assuming Linear Interpolation Between \({\varvec{M}}_{{{\mathbf{ext}}}}\) and \({\varvec{M}}_{{\mathbf{R}}}\)
Another frequently used method is to estimate \(\sigma_{{\text{s}}}\) based on the ratio of the bending moment \(M_{{{\text{ext}}}}\) in the SLS, and the ultimate bending moment capacity \(M_{{\text{R}}}\). The latter is calculated as
and can be derived from horizontal and moment equilibrium. In Eq. (3), \(b\) denotes the width of the cross-section, \(f_{{{\text{cm}}}}\) the mean value of the compressive strength of the concrete and \(f_{{\text{y}}}\) the yield strength of the reinforcement. The factor \(14/27\) is based on the stress-strain relation for concrete classes up to C50/60 [4]. According to [8], \(\hat{\sigma }_{{\text{s}}}\) can now be calculated as
This method is based on the same assumptions as the Schrier method, except that the height of \(x_{{\text{c}}}\) is based on an interpolation of \(M_{{{\text{ext}}}} /M_{{\text{R}}}\). Equations (3) and (4) will be called the Interpolation method in this paper.
3 Development of the New Semi-analytical Method
Like the previously presented methods, the derivation of the semi-analytical method started with the analytical derivation of the horizontal and bending moment equilibrium equations. For the assumed directions in the equilibrium, see Fig. 1. The resulting equations for the horizontal force and bending moment are, respectively, given by
and
where the reference point for the bending moments was taken on the horizontal symmetry line. The various parts of Eqs. (5) and (6) are depicted in Fig. 1 and are further explained and calculated in Eqs. (7)–(23).

A non-linear concrete compression stress-strain relation represents the concrete compression behaviour. The assumed relation was adopted from EN1992–1-1 [4] and fib Model Code 2010 [6] and is given by.
With
where \(\sigma_{{\text{c}}}\) denotes the concrete compression stress, \(f_{{{\text{cm}}}}\) the average concrete compression strength, \(\varepsilon_{{\text{c}}}\) the strain in the concrete element, which varies linearly over the height of the cross-section by the adoption of the assumption that plane sections remain plane during bending, \(\varepsilon_{{{\text{c}},1}}\) the strain at maximum compressive stress, \(\varepsilon_{{{\text{c}},{\text{lim}}}}\) the maximum allowable \(\varepsilon_{{\text{c}}}\), \(E_{{{\text{c}},i}}\) the tangent short-term modulus of elasticity of concrete and \(E_{{{\text{c}},1}}\) the secant modulus from the origin to the peak of the compression curve. The concrete compression force, \(F_{{\text{c}}}\), was then computed by integrating \(\sigma_{{\text{c}}}\) over the height of the compression zone, thus
The corresponding centre of gravity \(z_{{\text{c}}}\) of \(F_{{\text{c}}}\) is given by
The tensile part of the cross-section \(F_{{{\text{t}},1}}\), corresponding to \(\sigma_{{\text{t}}} \le f_{{{\text{ctm}}}}\), is given by
where \(x_{{{\text{t}},1}}\) represents the height of the part of the cross-section related to \(F_{{{\text{t}},1}}\), and can be calculated by
where \(\varepsilon_{{{\text{c}},{\text{top}}}}\) denotes the strain at the top of the concrete element. \(x_{{{\text{t}},1}}\) was calculated based on the assumed distribution of \(\varepsilon_{{\text{c}}}\) over the height of the concrete element, see Fig. 1. For the part related to \(\sigma_{{{\text{ct}}}} > f_{{{\text{ctm}}}}\), the tension softening curve developed by Hordijk et al. [12–14] was selected, which is presented by
where \(\sigma_{{{\text{ct}}}}\) indicate the tensile stress, which is a function of the crack width \({\Delta }u_{{\text{n}}}\) according to the tension softening curve. The implementation of the Hordijk curve allowed for a non-linear calculation of \(\sigma_{{{\text{ct}}}}\). Linear softening stress-strain relationships also exist but are simplifications of the non-linear ones [6]. The ultimate crack width \(\Delta u_{{{\text{n}},{\text{ ult}}}}\) is the crack width \({\Delta }u_{{\text{n}}}\) where the concrete still can transfer \(\sigma_{{{\text{ct}}}}\). \(c_{1}\) and \(c_{2}\) are coefficients which define the shape of the tension softening curve. Eq. (13) is only valid for \({\Delta }u_{{\text{n}}} < {\Delta }u_{{{\text{n}},{\text{ult}}}}\), which is associated to case 1, otherwise \(\sigma_{{{\text{ct}}}}\) is \(0\) MPa. If \({\Delta }u_{{{\text{n}},{\text{ ult}}}}\) in the cross section is reached, then \(\sigma_{{{\text{ct}}}} = 0\) in the parts of a specific crack where \(w > {\Delta }u_{{{\text{n}},{\text{ult}}}}\). This is described by case 2. This implies that the distribution of \(w\) over the height of the crack is needed. However, in this paper, it was assumed that \(w\) is proportional to the strain distribution over the height of the cross-section, allowing that only one point of \(w\) needs to be measured. In this paper measurements of \(w\) at the most tension face were used; this will be discussed in the results section. If \(w \le {\Delta }u_{{{\text{n}},{\text{ ult}}}}\), tension softening according to Eq. (13) Was applied; this is called case 1. \({\Delta }u_{{{\text{n}},{\text{ult}}}}\) is calculated by
where \(G_{{\text{f}}}^{I}\) represents the fracture energy according to fracture mode I and was estimated according to [6]. To convert \(\Delta u_{{{\text{n}},{\text{ ult}}}}\) to an ultimate strain \(\varepsilon_{{{\text{n}},{\text{ult}}}}\), \({\Delta }u_{{{\text{n}},{\text{ ult}}}}\) was smeared over a crack bandwidth \(l_{{{\text{cs}}}}\) according to [6] \({\Delta }u_{{{\text{n}},{\text{ ult}}}}\) can then be converted to an ultimate strain by
In Eq. (15), \(s_{{{\text{r}},{\text{m}}}}\) denotes the average crack spacing and \(y\) the distance from the N.A. to the bottom tension fibre, evaluated based on a cracking analysis in the elastic phase, neglecting the residual tensile strength of the concrete. \(F_{{{\text{t}},2,{\text{case}}1}}\), representing the force related to the non-linear Hordijk Softening curve based on case 1, was then calculated as
where the centre of gravity \(z_{{{\text{t}},2,{\text{case}}1}}\) is described by
Finally, the tensile force in the reinforcement \(F_{{\text{s}}}\) is given by
derived again based on the strain distribution according to Fig. 1. By substituting Eqs. (7)–(18) into Eqs. (5) and (6), the complete model was determined for case 1.
\(F_{{{\text{t}},2}}\) for case 2, \(F_{{t,2,{\text{case}}2}}\), was obtained using a similar procedure; the ultimate strain is reached in the cross-section, thus
The height of the cross-section related to the tension softening zone for case 2, \(x_{{{\text{t}},2,{\text{case}}2}}\), is described by
and the centre of gravity is given by
Equations (19) and (21) were expressed in terms of strains instead of stresses by a scaling factor in front of the integral in order to emphasize that the transition between cases 1 and 2 is determined by \(\varepsilon_{{{\text{n}},{\text{ult}}}}\). Like case 1, for case 2, the strain distribution was entirely determined by substituting Eqs. (7)–(15) and Eqs. (18)-(21) into Eqs. (5) and (6). The derived non-linear Eqs. (5) and (6) were solved numerically for \(\varepsilon_{{{\text{c}},{\text{top}}}}\) and \(x_{{\text{c}}}\), making it a semi-analytical method. In order to find physically admissible solutions or to increase the speed of convergence, an initial guess was used. The initial guess was based on Eq. (1) since that equation expresses \(x_{{\text{c}}}\) in closed form, leading to \(x_{{{\text{c}},{\text{ init}}}}\). From the found \(x_{{{\text{c}},{\text{ init}}}}\), \(\varepsilon_{{{\text{c}},{\text{ top}},{\text{ init}}}}\) was based on an initial guess for \(\varepsilon_{{{\text{c}},{\text{top}}}}\). \(\varepsilon_{{{\text{c}},{\text{ top}},{\text{ init}}}}\) was derived by applying moment equilibrium on the assumptions related to the Schrier method. \(\varepsilon_{{{\text{c}},{\text{ top}},{\text{ init}}}}\) is given by
Finally, from the solved \(x_{{\text{c}}}\) and \(\varepsilon_{{{\text{c}},{\text{ top}}}}\) from Eqs. (5) and (6), \(x_{{\text{c}}}\) and \(\varepsilon_{{{\text{c}},{\text{ top}}}}\) were back substituted into Eq. (18), from which \(\hat{\sigma }_{{\text{s}}}\) was computed by
The complete calculation procedure is summarized in Fig. 2.

Workflow for calculating \(\hat{\sigma }_{{\text{s}}}\) of the developed method.
4 Results and Validation
The model was validated based on the experiments of Berrocal et al. [15]. In these experiments, \(\varepsilon_{{\text{s}}}\) was measured using DOFs, and \(w\) was estimated using digital image correlation (DIC). In this paper, the measured value of \(\varepsilon_{{\text{s}}}\) was converted to \(\sigma_{{\text{s}}}\) by multiplying \(\varepsilon_{{\text{s}}}\) with \(E_{{\text{s}}}\). The experimental program consisted of six beams, tested in a three-point bending test, see Fig. 3. The load at mid-span was applied in a displacement-controlled manner. From the experimental program by [15], beams no. (1) and (2) were selected, which were monotonically loaded, to exclude the effect of load repetitions. The beams had cross-section dimensions of \(b\)=100 mm, \(h\)=150 mm, and \(d\)=120 mm. The reinforcement consisted of two reinforcement bars with a diameter \(\emptyset\) of 10 mm and \(E_{{\text{s}}}\)=200 GPa. The span of the beams was 800 mm. Even though the slenderness \(\lambda = L/h\) of the beam is close to 5; still the assumption of plane sections remaining plane was adopted due to the lack of other experiments with larger values of \(\lambda\). The mean cubic strength \(f_{{{\text{cm}},{\text{cube}}}}\), following from testing cubes 150x150x150 mm from the concrete batch, was 61 MPa and \(f_{ctm}\) was based on a mean splitting tensile strength of 4 MPa. In this paper, based on these provided material properties of [15], the characteristic cylindrical compression strength \(f_{{{\text{ck}}}}\), which is needed for further validating the developed model, was determined by
Eq. (24) Was derived using linear regression applied to the concrete compression properties described in [6]; the regression approach was inspired by Wijte et al. [16]. Applying Eq. (24) And inserting 61 MPa for \(f_{{{\text{cm}},{\text{ cube}}}}\) led to a \(f_{{{\text{ck}}}}\) of 46.9 MPa.
Regarding the measurements of [15], the DOFs had a spatial resolution of 0.625mm and a sampling rate of 5 Hz. This is larger than the sampling rate of the applied DIC system of 0.2 Hz. The spatial resolution of the DOFs was small compared to \(l_{{{\text{cs}}}}\), thus the measurement of \(\varepsilon_{{\text{s}}}\) of the DIC in the vicinity of a crack was very similar to the situation that \(\varepsilon_{{\text{s}}}\) would be measured in a crack. This implied that \(\varepsilon_{{\text{s}}}\) could be determined accurately, whether the spatial point of the DOF was located in a crack or in the vicinity of that specific crack. The noise value was 10 με (microstrain), corresponding to an estimated noise for \(\sigma_{{\text{s}}}\) of 2 MPa. The crack pattern was also visualized using DIC, which provided an accuracy of 8.5 μm for the described DIC setup.

Experimental setup from [15]
During the experiments of [15], the applied force \(F_{{{\text{ext}}}}\) was measured at the same time intervals as the DIC. However, due to the difference between the sampling rates of the DIC and DOFs and to be able to validate the presented method in this paper with the provided data from [15], linear interpolation was performed on the forcing and time scale of the DIC to compare results from DIC with DOFs.
The estimation of \(l_{{{\text{cs}}}}\) according to Eq. (15) required the computation of \(s_{{{\text{r}},{\text{m}}}}\) and \(y\). . Since only crack (4) \(w\) was estimated by DIC, \(s_{{{\text{r}},{\text{m}}}}\) was in this paper calculated based on the average of the crack spacing \(s_{{\text{r}}}\) between crack (3) and (4) and the spacing between crack (4) and crack (5), see Fig. 4. \(w\) was rather estimated than calculated since DIC was used by [15] to analyze \(w\) at the tension face of the beams, which might differ from \(w\) located at the reinforcement bars. Nonetheless, due to the limited width of 100 mm, it was assumed that the estimated \(w\) is close to the observed \(w\) by DIC. This led for beam (1) and (2) to \(s_{{{\text{r}},{\text{m}}}} = 101\) mm and \(s_{{{\text{r}},{\text{m}}}} = 86\) mm, respectively. These values were comparable to the distance from the N.A. to the bottom fibre according to Eq. (15), hence for \(l_{{{\text{cs}}}}\) the mean crack spacing was implemented.

Location of cracks, A) beam 1, B) beam 2. The crack number \(i\) is denoted as \(\left( i \right)\). \(s_{{\text{r}}}\) is indicated with black arrows; the distances are indicated in m. \(u_{0}\) denotes the imposed deformation, which represents the applied load on the concrete element, varying between a lower \(F_{{{\text{low}}}}\) and an upper \(F_{{{\text{up}}}}\) bound.
For beam (1) and beam (2), 4147 and 2, 4200 measurement points from [15] were selected, respectively. The number of analyses was related to the selected applied forces \(F\) resulting from the displacement controlled loading, which resulted in \(M_{{{\text{ext}}}}\) at the location of crack (4). The lower bound of \(F\) was selected as the point where for crack \(\left( 4 \right)\) a width of 0.05 mm was reached. The choice of 0.05 mm was based on two reasons: 1) it was used as a lower bound \(F_{{{\text{low}}}}\) for the determination of the crack locations in the paper of [15]; 2) a small \(w \le 0.05\) mm cannot be measured by DIC with the same relative accuracy compared to a larger \(w\). The upper bound \(F_{{{\text{up}}}}\) of the applied force was chosen before some NaN values were encountered, close to the end of the measurements. With these starting and ending points of the analyses, almost all available information was considered. See Fig. 5 for the considered moments and the related crack widths, with their corresponding time. The effect of the load due to a self-weight of 0.375 kN/m was neglected since the applied external bending moment \(M_{{{\text{ext}}}}\), , at the location of crack (4), due to a load of \(F_{{{\text{low}}}} ,\) was over 50 times the bending moment due to self-weight. The results showed an approximately linear correlation between \(M_{{{\text{ext}}}}\) and \(w\).

Loading sequences. Left figure: beam (1). Right figure: beam (2).
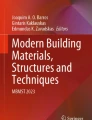
In Fig. 6, \(\hat{\sigma }_{{\text{s}}}\) is presented versus the estimated \(w\) according to DIC. \(\hat{\sigma }_{{\text{s}}}\) according to the Schrier and Interpolation method are compared with the developed method in this paper, and the computed \(\sigma_{{\text{s}}}\) according to the measured strains. The figure reveals that all methods in these ranges were approximately describing a linear relation between \(\hat{\sigma }_{{\text{s}}}\) and \(w\). This is reasonable since a single crack is considered; thus, \(w\) is then more or less proportional to \(\sigma_{{\text{s}}}\). The developed method showed less overestimation of \(\hat{\sigma }_{{\text{s}}}\) with respect to \(\sigma_{{\text{s}}}\), calculated based on \(\varepsilon_{{\text{s}}}\) measured by the DOFs. The overestimation was still most severe in the early stage of the cracking process, thus when \(M_{{{\text{ext}}}}\) was close to \(M_{{{\text{ext}}}}\) at \(F_{{{\text{low}}}}\), but provided in these regions still \(\approx 30 - 50\%\) less overestimation compared to the Schrier and Interpolation methods. The reason is that the strains over the height of the cross-section, based on the assumption of the developed method, are relatively small compared to the Schrier method, leading to a smaller value of \(\varepsilon_{{\text{s}}}\). The \(\varepsilon_{{{\text{c}},{\text{ top}}}}\) for the developed method compared to the Interpolation method is small; however, the developed method has a larger \(x_{{\text{c}}}\), leading to a smaller \(\varepsilon_{{\text{s}}}\) and thus a smaller \(\hat{\sigma }_{{\text{s}}}\). This is depicted in Fig. 7. Interestingly, the Interpolation method led to minor stresses than the Schrier method. This was reasonable since the first method is computed as an interpolation of \(M_{{{\text{ext}}}} /M_{{\text{R}}}\), leading to smaller \(x_{{\text{c}}}\), consequently a larger \(z\) and thus a smaller \(\hat{\sigma }_{{\text{s}}}\). The three methods converge for larger \(w\) and thus a larger \(F_{{{\text{ext}}}}\). Since the tension softening effect decreases for large loads, \(\hat{\sigma }_{{\text{s}}}\) according to the developed method leads to approximately the same value of \(\hat{\sigma }_{{\text{s}}}\) according to the Schier and the Interpolation methods. The described behaviour was generally the same for beams (1) and (2).

\(\sigma_{{\text{s}}}\) vs. estimated crack width \(w\) for the Schrier, Interpolation and the developed method for the calculation of \(\hat{\sigma }_{{\text{s}}}\). In red: \(\hat{\sigma }_{{\text{s}}}\) based on the measured values of \(\varepsilon_{{\text{s}}}\) according to [15], for beams (1) and (2).

Strain distribution over the height of the cross-section depicted for beam (1), for \(M_{{{\text{ext}}}}\) at \(F_{{{\text{low}}}}\). The results of beam (2) show similar behaviour and are therefore not depicted.
5 Conclusions and Discussion
This paper discussed the Schrier and Interpolation methods to calculate steel stresses in reinforced concrete elements subjected to bending with a rectangular cross-section and compared them with a method based on more complex constitutive relations for reinforced concrete. It demonstrated that the existing Schrier and Interpolation methods underestimate the steel stress, especially in the initial cracking stage. It also showed that existing methods describe the steel stress relatively accurate at the end of the cracking process. The developed method can estimate the steel stresses during the complete cracking stage with less overestimation and more accuracy. Furthermore, the resulting stresses have the same magnitude as those calculated based on DOFs. However, before the developed method can be applied, it could be simplified and verified based on more experiments tested with DOFs and DICs. More slender beams should be tested in future experiments to satisfy the assumption that plane sections remain plane during bending since that assumption was adopted for the presented semi-analytical method. The results in this paper present a workflow and method for comparing various methods to calculate steel stresses and are not meant for a final comparison since only measurements from two beams were used. This can be done in future research using more measurements from the combined application of DOFS and DICs. The presented method can easily be extended to several cross-sections or more sophisticated reinforcement configurations like multiple reinforcement layers. It can also describe steel stresses more accurately when comparing crack width formulations.
References
Otieno, M., Alexander, M., Beushausen, H.: Corrosion in cracked and uncracked concrete - influence of crack width, concrete quality and crack reopening. Mag. Concr. Res. 62(6), 393–404 (2010)
Scott, A., Alexander, M.: The influence of binder type, cracking and cover on corrosion rates of steel in chloride-contaminated concrete. Mag. Concr. Res. 59(7), 494–505 (2007)
Otieno, M., Beushausen, H., Alexander, M.: Resistivity-based chloride-induced corrosion rate prediction models and hypothetical framework for interpretation of resistivity measurements in cracked RC structures. Mater. Struct. 49(6), 2349–2366 (2015). https://doi.org/10.1617/s11527-015-0653-z
EN 1992–1–1 - Eurocode 2: Design of concrete structures - Part 1–1: General rules and rules for buildings (2011)
Allam, S.M., Shoukry, M.S., Rashad, G.E., Hassan, A.S.: Crack width evaluation for flexural RC members. Alex. Eng. J. 51(3), 211–220 (2012)
Model Code 2010. International Federation for Structural Concrete fib, Lausanne, Switzerland (2010)
van der Schrier, W.: Bouwen in Gewapend Beton, ‘s-Gravenhage’: Argus (1965)
Tomislav, K., Ivan, P.: Preliminary dimensioning of reinforced concrete sections. J. Croatian Assoc. Civil Eng. 66(12), 1125–1140 (2015)
Balázs, G., et al.: Design for SLS according to fib Model Code 2010. Struct. Concr. 14(2), 99–123 (2013)
Allam, S.M., Shoukry, M.S., Rashad, G.E., Hassan, A.S.: Evaluation of tension stiffening effect on the crack width calculation of flexural RC members. Alex. Eng. J. 52(2), 163–173 (2013)
Lapi, M., Orlando, M., Spinelli, P.: A review of literature and code formulations for cracking in R/C members. Struct. Concr. 19(5), 1481–1503 (2018)
Diana FEA: 21.1.3 Nonlinear Tension Softening (Hordijk et al.), 29 November (2010). https://manuals.dianafea.com/d943/MatLib/node305.html. (Accessed 24 11 2022).
Hordijk, D.A.: Local approach to fatigue of concrete. W.D. Meinema b.v., Delft, The Netherlands (1991)
Cornelissen, H., Hordijk, D., Reinhardt, H.: Experimental determination of crack softening characteristics of normalweight and lightweight. Heron 31(2), 45–56 (1986)
Berrocal, C.G., Fernandez, I., Rempling, R.: Crack monitoring in reinforced concrete beams by distributed optical fiber sensors. Struct. Infrastruct. Eng. 17(1), 124–139 (2021)
Wijte, S.: Onderzoek constructieve veiligheid breedplaatvloeren in bestaande utiliteitsgebouwen. Adviesbureau ir. J.G. Hageman B.V., Rijswijk (ZH) (2019)
Acknowledgements
The authors thank Rijkswaterstaat Grote Projecten en Onderhoud (GPO) for their financial support and valuable feedback while writing this paper. The support of Carlos G. Berrocal for the provision of data and explanation is much appreciated.
Funding
The source code for the computation is available online: https://github.com/iavdesch.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
van der Esch, I.A., Wolfs, R., Wijte, S. (2023). Calculation of Steel Stresses in Cracked Reinforced Rectangular Concrete Elements Loaded in Bending. In: Jędrzejewska, A., Kanavaris, F., Azenha, M., Benboudjema, F., Schlicke, D. (eds) International RILEM Conference on Synergising Expertise towards Sustainability and Robustness of Cement-based Materials and Concrete Structures. SynerCrete 2023. RILEM Bookseries, vol 43. Springer, Cham. https://doi.org/10.1007/978-3-031-33211-1_94
Download citation
DOI: https://doi.org/10.1007/978-3-031-33211-1_94
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-33210-4
Online ISBN: 978-3-031-33211-1
eBook Packages: EngineeringEngineering (R0)