
Abstract
In order to solve the problem of poor positioning effect of Marine Mobile buoys, a passive positioning method of Marine Mobile buoys based on vibration signal extraction is proposed. First of all, using the principle of signal extraction, the operational characteristic data of Marine Mobile buoys are obtained. Secondly, the interference value of the abnormal vibration signal is cleaned and removed to remove the interference signal. Finally, according to the frequency relationship between the satellite signal and the buoy transmission signal, the passive positioning of the marine mobile buoy is completed. Finally, the experiment proves that the passive location method of Marine Mobile buoy based on vibration signal extraction has high practicability and fully meets the research requirements.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Buoy is one of the important means of ocean observation. In order to achieve fine-grained observation of marine environmental parameters, it is often necessary to deploy a large number of buoys in the observation area. However, the buoy observation data without position information is meaningless. The accurate position information of the buoy observation data provides important decision support information for fishery production scheduling, search and rescue, early warning, emergency handling, behavior decision and other applications. Therefore, it is necessary to accurately locate the position of the buoy.
However, in the marine observation environment, because the buoy is relatively close to the sea surface, the radio signal is attenuated seriously in the transmission process, and its nonlinear attenuation model is more complex. Due to the influence of environmental noise, reflection, multipath, nonlinear attenuation and other negative factors in the transmission process of wireless signals, as a result, the distance estimation between the unknown buoy (the buoy whose position information is unknown and to be located) and each reference buoy (the buoy whose position information is known) has different degrees of error, resulting in low positioning accuracy.
Reference [1] proposes an ocean buoy positioning method based on asymmetric round-trip ranging, which uses the time difference between asymmetric receiving and sending ranging information between nodes to calculate the sound speed of seawater between nodes and the distance between unknown buoy nodes and their neighbor reference nodes. Convert the three-dimensional distance information into two-dimensional, and use the least square method to complete the positioning calculation. Reference [2] proposes an ocean buoy positioning method based on acoustic target motion elements, establishes an optical buoy observation mathematical model including buoy positioning error, observation time error and optical observation blur error, and uses Monte Carlo simulation method to give the positioning accuracy index of different numbers of optical buoys considering the above errors and aiming at mobile targets, and analyzes the influence of various factors on multi buoy joint positioning. Reference [3] proposes an ocean buoy positioning method based on the product season model. In view of the time series characteristics of the light buoy position data, the product season model is used to establish a mathematical model of buoy positioning, and the position information of the ocean buoy can be obtained by solving the mathematical model to complete the ocean buoy positioning.
Passive positioning is that the observation station passively receives the electromagnetic wave of the target from the vibration signal source without transmitting any vibration signal, and determines the position and motion state information of the target according to various parameters of these vibration signals. Compared with active location, passive location has the following advantages: good concealment; It can obtain a detection range much larger than that of the active radar, and can find the target in advance; Low cost. Passive positioning and guidance technology can detect and find long-range vibration signals on the sea surface and stealth targets as soon as possible, and improve the passive positioning accuracy of Marine Mobile buoys. According to the frequency of the vibration signal, the positioning of the marine mobile buoy can be divided into single station passive positioning and multi station passive positioning. In order to further improve the positioning accuracy of Marine Mobile buoys, this paper proposes a passive positioning method of Marine Mobile buoys based on vibration signal extraction.
2 Passive Positioning of Marine Mobile Buoys Based on Vibration Signal Extraction
2.1 Extraction of Vibration Signal of Marine Mobile Buoy
The marine data buoy is an ocean observation platform designed to meet the needs of marine scientific research. The development of buoy technology is closely related to marine engineering technology and sensor technology. Therefore, the development level of marine data buoys also reflects the level of marine science and technology in a country. According to different classification methods, the vibration signals of marine mobile buoys can be divided into different types, as shown in Table 1.
The marine data buoy includes body, communication, power supply, control, sensor and other parts involving structural design, data communication, sensor technology, energy and power technology and automation control. Due to the high cost of developing ocean data buoys, only a few major oceanic countries currently have the ability to produce, deploy and maintain large quantities of ocean buoys [4]. The buoy technology in Europe and the United States and other major marine countries started early. After years of accumulation of technology and practical experience, the buoy business has achieved a large scale. The buoy communicates between the underwater instrument and the water terminal through inductive coupling. The principle of inductive coupling communication is shown in Fig. 1.

Structure of coupling and transmission of vibration signal of marine mobile buoy
Both the above-water terminal and the underwater sensor are connected to the magnetic rings through coils, all the magnetic rings pass through a plastic-coated steel cable with bare ends, and the steel cable forms a loop through seawater. In the process of sending data from the water terminal to the underwater sensor, the carrier signal with the command information will be placed in the primary winding connected with the magnetic ring, and the magnetic ring can excite the induced current in the single-turn coil composed of the steel cable and the seawater, the induced current induces a voltage signal with command information in the secondary winding of the lower magnetic ring, and the sensor filters and demodulates the voltage signal to obtain the corresponding command [5]. The same process is used for the sensor to send data to the terminal on the water. The sampling period is set according to the density requirements of various meteorological factors in scientific research, and different sensors have different sampling frequencies. The underwater sensor CTD is sampled every half an hour, the meteorological sensor is collected every hour, and the GPS information is obtained every three hours, as shown in Fig. 2.

Operation and management process of vibration signals of marine mobile buoys
The operation and management process of the vibration signal of the marine mobile buoys is actively initiated by the buoy control. Each sensor is either powered on regularly, or is awakened by the controller for data communication, and is not the party that initiates the communication actively. As a host, the controller must have an accurate clock to ensure accurate data sampling and communication time [6]. During the communication between the controller and the GPS module, the satellite time at the moment will be obtained, the buoy time will be calibrated, and the platform terminal and the satellite can communicate in both directions. The uplink adds a high-speed channel on the basis of retaining the ARGOSI/2 generation standard and low-power channel. The frequency band is 401.580 MHz–401.610 MHz, the center frequency is 401.595 MHz, the bandwidth is ±15 kHz, and the rate is 4800 bps, using GMSK modulation. The downlink center frequency is 4659875 MHz, the bandwidth is ±15 kHz, and the rate is 400 bps or 200 bps (Table 2).
The search and acquisition of the serial vibration signal of the marine mobile buoy refers to the use of a digital correlator to scan the dimension of the Doppler frequency shift of the specified signal in the time domain. This algorithm is relatively easy to implement. The structure of the acquisition circuit is shown in Fig. 3.

Flow chart of serial sequential paving method
As can be seen from the figure, the module circuit can be completed only by a number of digital correlators, which greatly reduces the workload of the designer and saves resources. These correlators can also be multiplexed in subsequent signal tracking modules [7]. After determining the search range of the signal Doppler frequency shift, the linear search acquisition algorithm usually starts from the frequency band corresponding to the middle value of the frequency search range, and then gradually searches the frequency bands on both sides alternately, until finally detected signal or until all frequency bands are searched. Assuming that the search range of Doppler frequency shift is 2 ± 10 kHz, and the search step size is set to 500 Hz, then the receiver starts to search from the middle frequency band with Doppler frequency shift of 2kHz, and then searches for the center frequency of 1.5 kHz, 2.5 kHz, there are a total of 41 frequency bands such as 1.0 kHz and 3.0 kHz [8]. This “Christmas tree”-shaped frequency search sequence helps improve the receiver's probability of finding a satellite signal quickly. When searching for a signal in a certain frequency band, the receiver replicates a carrier signal whose frequency is the center frequency of the frequency band, and mixes it with the received signal to capture the received signal whose actual frequency is within the frequency band.
2.2 Algorithm for Interference of Vibration Signals of Marine Mobile Buoys
The marine environment is changing rapidly. As a test platform at sea, the buoy is often affected by the wind and wave environment at sea. The buoy is constantly swaying in the sea water. When the instability is too large, the marine environment measurement and communication of the drifting buoy will be affected. Therefore, stability is very important for buoys [9]. The stability of the target is not only that the electronic cabin equipment of the buoy, the temperature and depth measurement part and the environmental noise measurement part of the buoy are working normally, but also that the surface antenna and other parts can still work normally and reliably. The formula for calculating the natural frequency of the buoy signal swing is:
Among them: \(G\) is the gravity; \(L\) is the height of the buoy's stable center; \(I\) is the moment of inertia of the buoy mass relative to the horizontal axis of the center of mass. The GPS positioning method has fast observation speed and high positioning accuracy. It only needs to install GPS receivers on the aircraft and buoys, and there is no restriction on the maneuverability of the aircraft. The overhead detection method is a simple positioning indication method, but it requires the aircraft to fly over the buoy, which severely limits the aircraft's maneuverability and cannot perform long-distance positioning. The estimated state is often a part of all the states in the model. If the states that do not play a big role in the model are removed, and the influence of such states on other states is fully considered in the filter design, it may be possible to reduce the filter performance. Effectively reduce the amount of computation. Mathematical model 2 of the vibration signal localization algorithm reduces the number of states for buoy positioning from 13 to 6. In this study, we try to continue to simplify the model and reduce the order to the number of states required to be estimated, so as to find a simpler calculation method [10]. The equation can be simplified to
By describing the statistics of the noise, there will hopefully be enough degrees of freedom in position updates to compensate for any sonobuoy drift. However, this method was not completely successful. The drift of the buoy directly affects the position of the buoy. To ensure that the state vibration signal does not diverge, the drift action of the buoy must be considered. The preset position of marine buoy measurement and control is arranged in the middle and rear of the track, which is an equipment structure with actual carrying tasks. In the marine buoy measurement and control trajectory, there are three main measurement and control units including the intermediate position node, which are named “initial preset position”, “approaching preset position” and “correction preset position”, and each Each type of position structure corresponds to a relatively independent marine buoy measurement and control stage.
-
1)
Initial preset position: The initial preset position corresponds to the primary marine buoy measurement and control behavior. During this process, the marine buoy equipment always maintains the initial state, which is the first type of data information referenced by the entire preset position positioning process.
-
2)
Approaching the preset position: Approaching the preset position corresponds to the measurement and control behavior of the intermediate marine buoys. During this process, the behavior of the marine buoy equipment changes for the first time, which is the second type of data information referenced by the entire preset position positioning process.
-
3)
Correction of the preset position: The correction of the preset position corresponds to the monitoring and control behavior of the marine buoy at the end. During this process, the behavior of the marine buoy equipment gradually becomes stable, but the overall value level is much lower than the initial stage. This is the entire preset position. The third type of data information referenced by the positioning process. Let \(Q_{1}\), \(Q_{2}\), and \(Q_{3}\) represent the first type of data information, the second type of data information, and the third type of data information, respectively, and the above-mentioned physical quantities can be combined to define the division of the preset stage of ocean buoy measurement and control as:
$$ E = \frac{{\sqrt {\left( {\lambda_{1} Q_{1}^{2} + \lambda_{2} Q_{2}^{2} + \lambda_{3} Q_{3}^{2} } \right) - \overline{y}^{2} } }}{{\left| {QQ^{\prime}} \right|}} $$(3)
Among them, \(\lambda_{1}\), \(\lambda_{2}\), and \(\lambda_{3}\) respectively represent the marine buoy measurement and control behavior coefficients in the three preset stages, \(\overline{y}\) represents the numerical weight of the preset position in the trajectory, and \(\left| {QQ^{\prime}} \right|\) represents the positioning vector from the starting position to the ending position.
2.3 Anchor Point Layout for Preset Positions
The layout of the preset position positioning points takes the marine buoy measurement and control nodes in the ocean as the operation target, and plans the guiding direction of the positioning vector in the behavioral coordinate system according to the structural characteristics of different preset stages. In the weighted transoceanic coordinate system, \(A_{0}\) represents the initial position information of the preset position of the marine buoy measurement and control, and \(A_{n}\) represents the final position information of the preset position of the marine buoy measurement and control. The simultaneous formula can coordinate the positioning point of the preset position. The principle of planning Expressed as:
Among them, \(\mathop {A_{0} A_{n} }\limits^{ \to }\) represents the marker vector of marine buoys pointing from the initial position to the final position, \(n\) represents the specific real-valued quantity of the preset position of marine buoy measurement and control from the initial position to the final position, and \(\beta\) represents the established curvature condition of the curve in the weighted transoceanic coordinate system, \(\dot{u}\) represents the planning regression coefficient in the measurement and control trajectory. On the premise of ensuring that the overall planning position of the preset position does not change, taking the given time \(T\) as the counting condition, among all the possible curvature values in the weighted transoceanic coordinate system, a vector is randomly selected and defined as \(\beta^{\prime}\), and let \(R_{0}\) represents the lower limit layout boundary parameter, \(R_{1}\) represents the upper limit layout boundary parameter, and the simultaneous formula can express the positioning point layout discriminant of the preset position of the marine buoy measurement and control as:
In the above formula, \(\overline{p}\) represents the average speed of the ocean buoy measurement and control device in the weighted super-ocean system, and \(\chi^{\prime}\) represents the layout authority parameter of the positioning point. While it was observed that the general direction of drift of the buoy was correct. When the buoy control unit starts to work, it is powered on and initialized first, and the parameters are loaded after the power is successfully powered on. Due to the variability of the sea test environment, it is impossible to configure the parameters during the test. It is necessary to configure the parameters in advance before the test, and configure the operating variables in advance. The configuration of the control unit port, the initial state of the main control chip, the parameter configuration of the data transmission radio, the serial port configuration of the temperature depth measurement node, the serial port configuration of the GPS module, the configuration of the power-on time, the configuration of the acquisition time, the configuration of the sleep time and other parameters. After these parameters are configured, it is necessary to judge whether the GPS is ready, and check whether the working status of the GPS unit can be properly timed. If not, you need to continue to wait. If the GPS module is ready, wait to start. At this time, it is necessary to judge whether the measured control unit can be powered on and collected. If it cannot be powered on and collected normally, continue to wait for the start time. If it can be powered on and collected normally, perform the normal polling acquisition mode. Finally, it is judged whether the collection of the entire unit is completed. If the collection is not completed, the polling collection is continued. If the collection is completed, the operation of the entire program is completed. The overall control flow chart of the buoy control unit is shown in the figure below (Fig. 4).

Workflow of the buoy signal control unit
The process of configuring parameters of the buoy control unit for measuring marine environmental parameters is firstly powered on and initialized. After initialization, check whether the upper computer is connected. If it is not connected, continue to wait. If the computer is already connected, continue to the next step to check. The next step is to check the configuration of the temperature and depth measurement nodes. Through the host computer software and the buoy control panel, interactively check, check how many temperature and depth measurement probes are connected to the entire marine environment parameter measurement buoy, and check whether these temperature and depth measurement probes are all easy to use. If all the probes are available normally, proceed to the next step. If one or several probes fail, remove the failed probes before proceeding to the next step. After the probe detection is completed, the noise measurement node is detected to check whether the connected noise measurement node can work normally. The inspection method is basically the same as the detection method of the temperature and depth measurement point in the previous step.
2.4 Realization of Passive Positioning of Marine Mobile Buoy
Single-satellite frequency measurement passive positioning is to use the Doppler frequency of the signal obtained by the receiver to measure multiple times to determine the location of the radiation source (buoy). The schematic diagram of positioning is shown in Fig. 5.

Schematic diagram of passive positioning of buoys
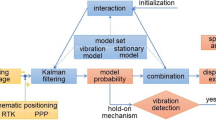
When the satellite passes over the ground radiation source, the satellite receives the signal from the radiation source and measures the frequency of the received signal. Usually a low-orbit satellite passes over the radiation source for 10 to 20 min. During this time, the satellite measures the signal frequency at multiple different times, stamps it with a time stamp, and stores it. When the satellite passes over the ground station, the ground station sends an instruction to the satellite to recover the Doppler frequency of the signal measured by the satellite. Since the ephemeris of the satellite is known (obtained by means of ground measurement and control), the time to read the satellite is obtained. Press the stamp to match the time of satellite frequency measurement with the ephemeris of the satellite at that time, and then the position coordinates and speed of the satellite at the time of frequency measurement can be obtained. The above data are sent to the data processing center together, and after a certain processing, the coordinates of the radiation source can be solved, and the positioning of the target can be completed. The process of signal processing is shown in the figure (Fig. 6):

Single-satellite passive positioning processing flow
According to the principle of vibration signal, the frequency \(f\) of the signal received by the satellite and the frequency \(f_{T}\) of the signal transmitted by the buoy have the following relationship
In the formula, the speed of the buoy at time \(i\) is set to \(V_{i}\), the frequency received at the viewing time is set to \(\theta\), the frequency of the buoy transmission is set to \(c\), and the angle between the buoy connection and the direction of the satellite speed is set to \(Z\) is the vibration frequency. Based on this, the passive positioning target of the marine mobile buoy is realized to ensure the positioning accuracy.
3 Analysis of Results
In order to effectively verify the correctness of the positioning method and the performance of the receiver, the research group built a complete set of ground test platforms. The built test platform can effectively complete the data registration of the host to the PMT and the sampling of the PMT transmitted signal, and prepares for the data processing and analysis of the software receiver in the next step. Two models of FVCOM and ROM are selected. The main purpose of this experiment is to compare and study various situations of drifting buoys at different depths, and compare the influences between them. Since the result of each experiment is the longitude and latitude of the model or drifting buoy at each time point, it is necessary to convert the difference of longitude and latitude into distance difference. The following formula is used in this experiment:
Increasing the measurement range to 10 V, its resolving power does not exceed 1 uV, and the accuracy exceeds 3 PPM. In this way, the calculation results of the nanovoltmeter can be used as the precise value of the measurement. The fitting and fitting relationship of Vstd-Vm of each channel is obtained by the least square method. In subsequent tests, in order to obtain more accurate measurement data, this formula must be used to correct the test data. Select several different voltage values to measure it, each with five different values, to get the average of the values. The vibration signal extraction method is fitted with origin. The vibration signal extraction method for each simulated transformed channel and its second order factor are listed in the table (Table 3).
Through the VI editor, the underwater data acquisition program and the communication program of the floating buoy platform are written respectively. Through the GDB debugging tool, you can easily debug the program under the Linux of the host computer, and you can set breakpoints for debugging. Compile and generate executable files, and write Makefile files. Using the extended vibration signal algorithm, combined with the Doppler frequency shift and satellite ephemeris data generated by STK simulation, the radiation source can be better located. The positioning results are shown in the figure (Fig. 7).

Convergence diagram of buoy positioning error
In the calculation of the daily average wrong distance, the hourly distance deviation value is divided by the time-weighted value, that is, the hourly distance deviation value is divided by 24 min of work time. Every hour will get the wrong data of one kilometer per day, and then divide this value by 24, you can get the real wrong data of the next day. Horizontally, the ocean can be divided into many layers, and at each layer, the flow direction and speed of the water flow are also different, and the flow of one layer cannot be used to replace the overall flow of water. However, in this state, in order to express the data more accurately and to facilitate experiments, the ocean is often divided into several levels and divided according to different environments. The experiment used floating buoys to analyze currents at all levels of the ocean (Fig. 8).

The detection results of buoy positioning at different depths
The depth unit positioning test is carried out in the pool. The depth component of MS5837 is detected and corrected by high-precision motorized buoys. The motorized buoys have high accuracy and can be positioned within the range of ±0.05%. The average value of the mobile buoy and the MS5837 positioning data set at each test point, and the comparison between the two is as follows (Fig. 9).

Pressure values at different heights
The marine mobile buoy can move according to the command of the host, and at the same time, it can also collect the information from the buoy. During the test process, the input signal can continuously excite the entire system and excite the oscillation of the entire working area, which depends on the working state of the simulation positioning platform, and requires a running curve within 0.5, so as to obtain an operating state close to the real one. Simulation results (Figs. 10 and 11).

The localization detection results of the method in reference [2]

Localization detection results of the method in this paper
The results show that the positioning and monitoring performance and efficiency of the method in this paper are significantly better than those in reference [2], and the tracking and positioning of the target's entry point and track are realized.
The above process verifies the performance of the positioning method. In order to verify the performance of the proposed positioning method more comprehensively, the method in this paper is compared with the method in reference [3] with the positioning time as the experimental comparison index. The comparison results of the positioning time of the two methods are shown in Fig. 12.

Comparison results of positioning time
It can be seen from the comparison results of positioning time-consuming shown in Fig. 12 that the positioning time-consuming of the method in this paper is far lower than that of the method in reference [3]. The maximum positioning time-consuming of the method in this paper is no more than 10 s, and the maximum positioning time-consuming of the method in reference [3] is 40 s. Therefore, it shows that the method in this paper can reduce the time-consuming of passive positioning of Marine Mobile buoys.
4 Concluding Remarks
Taking the buoy positioning as the design background, the main research contents are the design and simulation of the positioning algorithm according to the requirements; the second is the software design of the display and control platform; the third is the analysis of the test data and the processing of the vector buoy array positioning. The measurement of the target water entry position and the tracking of the flight segment trajectory, according to the different signal types during target detection, the positioning algorithm is divided into a pure azimuth passive measurement algorithm based on azimuth measurement and a hyperboloid intersection positioning algorithm based on time delay measurement. The location of the target water entry point is located by using the azimuth and time delay information of the target's sound of hitting the water. According to the actual situation, two algorithms are used to complete the combination; Calculate. According to the requirements, the optimal design of the formation is carried out, and the accuracy of the two positioning algorithms in different formations is analyzed, which lays a good foundation for the design of the display and control software. The design of the display and control platform mainly uses the object-oriented design method, based on the Visual c++ 60 software development platform to complete. The experimental results show that the method in this paper is stable and has good performance, and the display and control positioning has completed the predetermined function.
References
Qin, Y., Liu, H., Deng, Y., et al.: A new localization method for marine wireless sensor networks based on asymmetric round-trip ranging. Acta Metrologica Sinica 41(09), 1039–1047 (2020)
Guo, J., Sun, J., Wang, K.: Multi-optical buoys joint localization algorithm and simulation. J. Unmanned Undersea Syst. 29(02), 176–182 (2021)
Wu, Z., Xiang, L., Xiao, H., et al.: Prediction the position of light buoy using multiplicative seasonal ARIMA model. Electron. Meas. Technol. 44(14), 8–16 (2021)
Xu, L., Jin, Y., Xue, H., et al.: Buoy drifting position modeling based on telemetry data. J. Shanghai Maritime Univ. 42(04), 26–32 (2021)
Liu, X., Zheng, J., Wu, H., et al.: LoRa buoy network coverage optimization algorithm based on virtual force. Appl. Res. Comput. 37(12), 3768–3772 (2020)
Luo, Q., Song, Y.: Maximum likelihood localization of buoy for marnine environmental observation. Wirel. Internet Technol. 17(22), 7–10 (2020)
Gao, S., Li, J., Hu, C., et al.: Design of positioning communication device for marine environmental monitoring buoy based on BDS. (09), 41–45+68 (2020)
Liu, X., Nan, Y., Xie, R., et al.: DDPG optimization based on dynamic inverse of aircraft attitude control. Comput. Simul. 37(07), 37–43 (2020)
Li, L., Lv, T., Zhang, J.: Design of satellite communication and positioning system applied to smart float. Transd. Microsyst. Technol. 39(01), 91–94 (2020)
Lu, K., Rao, X., Wang, H., et al.: The influences of different mooring systems on the hydrodynamic performance of buoy. Acta Armamentarii 43(01), 120–130 (2022)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 ICST Institute for Computer Sciences, Social Informatics and Telecommunications Engineering
About this paper

Cite this paper
Li, X., Du, Y. (2023). Passive Positioning Method of Marine Mobile Buoy Based on Vibration Signal Extraction. In: Fu, W., Yun, L. (eds) Advanced Hybrid Information Processing. ADHIP 2022. Lecture Notes of the Institute for Computer Sciences, Social Informatics and Telecommunications Engineering, vol 468. Springer, Cham. https://doi.org/10.1007/978-3-031-28787-9_4
Download citation
DOI: https://doi.org/10.1007/978-3-031-28787-9_4
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-28786-2
Online ISBN: 978-3-031-28787-9
eBook Packages: Computer ScienceComputer Science (R0)