
Abstract
Laser interference frequency ratio counting method is widely used in absolute vibration standard devices. However, it can only measure amplitude, and cannot get vibration phase. This paper studies a method of measuring vibration phase by using the relationship between laser interference fringes and vibration displacement of vibrostand, and gives a mathematical model of vibration phase measurement by laser interference waveform demodulation. Based on the homodyne Michelson laser interferometer, this method uses a high-speed data collector to synchronously collect laser interference signals and sensor signals, and demodulates the vibration waveform on the virtual instrument software platform, realizing the real-time measurement of vibration amplitude and phase.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
- Vibration metrology
- Waveform demodulation
- Homodyne Michelson interferometer
- Phase frequency characteristic
1 Introduction
Homodyne Michelson interferometer is a type of laser interferometer widely used in the field of vibration metrology. At present, the fringe counting method established by the homodyne Michelson interferometer is used as the absolute measurement method of vibration. However, it can only measure the vibration amplitude, and cannot measure the vibration phase [1]. The absolute measurement method of vibration amplitude and phase studied in this paper is realized on the basis of homodyne Michelson laser interferometer, using high-speed data acquisition card and virtual instrument technology. While the vibrostand produces a displacement of a half laser wavelength, an interference fringe will be produced. The interference fringe will output a sinusoidal signal similar to frequency modulation through a photomultiplier tube. The data acquisition system collects this signal with the source signal as the gate signal, and then demodulates the vibration displacement waveform on the virtual instrument software platform, realizing the simultaneous measurement of the amplitude and phase of the standard vibrostand and the vibration sensor data [2]. This method realizes the automatic measurement of vibration amplitude and phase, provides a new means for the phase calibration of vibration sensors.
2 Vibration Parameters
In sine linear vibration measurement, there are three basic vibration parameters: displacement, velocity and acceleration, of which acceleration is the main parameter. In the field of engineering applications, vibration accelerometer is generally used to obtain vibration acceleration values. For the verification and calibration of vibration accelerometers, the complex sensitivity of vibration accelerometer sets is obtained by comparison method and absolute method [3, 4].
The complex sensitivity of accelerometer is expressed by the complex-valued function of frequency:
wherein, \(\hat{S}_{a} = \frac{{\hat{u}}}{{\hat{a}}}\) is the sensitivity amplitude of the accelerometer; \(\hat{u}\) is the amplitude of the output voltage \(u\) of the accelerometer; \(\hat{a}\) is the amplitude of the speed \(a\); \(\varphi_{u}\) is the initial phase of the output signal of the accelerometer; \(\varphi_{a}\) is the initial phase of the vibrostand acceleration; \(\Delta \varphi = \varphi_{u} - \varphi_{a}\) is the phase shift of the complex sensitivity of the accelerometer. The phase shift in formula (1) is the difference between the electrical output phase of the accelerometer and the mechanical vibration input phase. The variation curves of accelerometer sensitivity amplitude \(\hat{S}_{a}\) and phase shift \(\Delta \varphi\) in frequency domain are called amplitude-frequency characteristics and phase-frequency characteristics of sensitivity respectively [5].
3 Homodyne Michelson Laser Interferometer
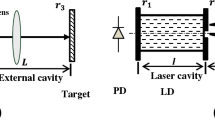
Homodyne Michelson laser interferometer is used in this paper. The measurement principle is shown in Fig. 1. The emitted laser beam is divided into two beams through the beam splitter: the reflected beam (reference beam) is reflected by the reference mirror, then returns to the beam splitter, and is emitted to the photodetector through the beam splitter; the transmitted beam (measuring beam) is reflected by the mirror fixed on the acceleration, then returns to the beam splitter for reflection, and is also emitted to the photodetector [6]. Let the light intensity of the reference beam be E1 and the light intensity of the measuring beam be E2.

Schematic diagram of measurement principle.
where in: E10, E20—light intensity amplitudes of the reference beam and the measuring beam; L1, L2—optical paths of the reference beam and the measuring beam;
ω0—optical angular frequency;
λ—light wavelength;
ϕ—initial phase of light wave.
The photodetector responds to the average intensity of the optical signal, and the photocurrent I
Substitute the formula (2) into the formula (3) and discard the DC part that the photodetector cannot respond to. The AC voltage U of the photoelectric signal taken out from the sampling resistor is:
wherein: d0cos(ω t + ϕo) is the vibration displacement; d0 is the single peak of vibration displacement; ω is the angular frequency, and ϕo is the initial phase;
L0—optical path difference without vibration, which is a constant phase after simplification. If there is motion interference, it can be expressed as φ0(t).
The formula (4) can be written as
wherein:

Correspondence between photoelectric signal (solid line) and vibration displacement signal (dotted line).
It can be seen from the equation that the interference waveform of sinusoidal vibration (that is, the AC voltage U of the photoelectric signal taken out by the sampling resistor) is a signal similar to the frequency modulation waveform, as shown in Fig. 2.
4 Laser Interference Waveform Demodulation
The sinusoidal interference waveform is a signal similar to the frequency modulation waveform. If high-speed data acquisition is used to collect a series of zero-crossing time ti (I = 1, 2, 3, 4,…) of photoelectric signal from positive direction (or negative direction) (as shown in Fig. 2). Note that t1, t2… are unequal interval time.
The displacement increment between two adjacent points in the sequence is ±λ∕2. If the homodyne Michelson interferometer is used, the Z of zero-crossing points from the positive (or negative) direction in N whole vibration periods is calculated, which is equal to the number in the fringe counting method. Based on this, the vibration displacement d0 = λZ/8N can be obtained. Its technical index is the same as that of the fringe counting method [7].
For the vibration displacement signal x(t),
Displacement difference Δx between two sampling points (7)
Wherein: Δf(ti) = 1/(ti + 1-ti).
From this
x′ is a new vibration displacement signal with the same amplitude and angular frequency as the original vibration displacement signal x(t), it has a phase shift of 900.
Although the homodyne Michelson interferometer cannot identify the vibration direction, when cooperating with the sinusoidal signal driving the vibrostand and referring to the direction of the zero-crossing point of the signal source, we can completely determine the vibration direction of the vibrostand, and reproduce the consistent waveform of the vibrostand by the laser interference waveform. Figure 2 shows the correspondence between the laser interference waveform (solid line) and the vibration displacement signal (dotted line).
According to the acquisition scheme shown in Fig. 1, the obtained vibration displacement motion curve is consistent with the motion of the vibrostand. When the output of the calibrated sensor is synchronously acquired, the output signal of the sensor will make a transfer function for the vibration signal obtained, and the corresponding amplitude and phase characteristics of the sensor at this frequency point can be obtained, where the angle is the phase shift of the sensor [8]. Therefore, the phase calibration system of vibration measurement system is constructed. To get better results, the transformed x′ can be approximated by a trigonometric function. Namely:
Similarly, A, B and C can be obtained by the least square method, and the vibration displacement and phase can be calculated.
5 Experiments and Results
When the vibrostand is displaced a half of the laser wavelength, an interference fringe will be produced. The interference fringe outputs a sinusoidal signal similar to frequency modulation through a photomultiplier tube, and the pulse signal and the standard signal source signal are input into the data acquisition system at the same time. The data acquisition system counts the pulse signal with the source signal as the gate signal [9]. Then, the pulse signal is converted into a sequence of pulse numbers, and the number of pulses corresponds to the displacement value in the cycle time. The software platform of the measurement system is based on the signal frequency solved by the time interval of peak point. By searching the maximum value of pulse sequence and correcting the three points before and after the maximum value by proportional operation, the maximum point and its position are obtained, so as to determine the peak/bottom position of waveform. Then the signal amplitude is solved by the number of pulse sequences at the peak. The pulse sequence is used to fit and demodulate the reproduced displacement waveform and the amplitude and phase of acceleration [10].
This method can realize the calculation and display of waveforms and parameters such as laser interference signal fitting waveform, signal source input waveform, demodulated displacement waveform, sensor input waveform, peak acceleration value, single peak displacement value, distortion degree and phase shift value. The experimental data compared with those of the sine approximation method measurement are shown in Table 1, and the sensor used is quartz flexible acceleration sensor. From the data comparison, it shows that the phase measured by this method is basically consistent with that measured by sine approximation method, which proves that this method is accurate and feasible.
6 Conclusion
The method of measuring vibration phase based on homodyne Michelson laser interferometer is a new method of absolute phase measurement besides sine approximation method. Compared with the sine approximation method, the measurement system realized by this method has simpler structure, lower establishment cost, automatic control, automatic measurement, real-time display and other functions, It’s also more accurate for the parameter control of the vibrostand.
References
ISO 16063-11: Methods for the calibration of vibration and shock transducers. Part 11: Primary vibration calibration by laser interferometry
Wabinski, W., von Martens, H.J.: Time interval analysis of interferometer signals for measuring amplitude and phase of vibrations. Physikalisch-Technische Bundesanstalt (PTB) Fürstenwalder Damm 388,12587 Berlin, Germany
JJF 1265-1990: Technical specification for low frequency vertical vibration reference operation
JJF 1263-1990: Technical specification for low frequency horizontal vibration reference operation
National Metrological Verification Regulation. JJG233-2006. Piezoelectric Accelerometer
Yang, Z., Dacheng, L., et al.: Realization method and characteristics of heterodyne laser interferometer. Metrol. Technol. 7, 2–5 (1996)
Jiamin, X., Wei, Z., et al.: Vibration compensation method based on coefficient search for correcting interference fringes of atomic gravimeter. J. Phys. (2022)
Mingjian, M.: Data Acquisition and Processing Technology, 2nd Edition. Xi'an Jiaotong University Press, Xi'an (2005)
Leping, Y.: LabVIEW Programming and Application. Electronic Industry Press, Beijing (2001)
Xihui, C., Yinhong, Z.: LabVIEW8.20 Programming from Beginner to Proficient, 1st Edition. Tsinghua University Publishing House, Beijing (2007)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Cheng, H., Zhu, S. (2022). Research on Vibration Phase Measurement Technology Based on Laser Interference Waveform Demodulation. In: Neri, F., Du, KL., Varadarajan, V.K., Angel-Antonio, SB., Jiang, Z. (eds) Computer and Communication Engineering. CCCE 2022. Communications in Computer and Information Science, vol 1630. Springer, Cham. https://doi.org/10.1007/978-3-031-17422-3_14
Download citation
DOI: https://doi.org/10.1007/978-3-031-17422-3_14
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-17421-6
Online ISBN: 978-3-031-17422-3
eBook Packages: Computer ScienceComputer Science (R0)