
Abstract
This work proposes a novel receptance-based robust structural modification method of the natural frequency assignment. Potential perturbation of the target natural frequency, which arises from uncertainties in physical parameter modifications, is quantified by utilizing analytical sensitivity formulae derived in this research. The proposed sensitivity formula is introduced to the natural frequency assignment optimization calculation as an extra term penalizing poor-robust solutions. Such an improvement can boost obtaining the nominal values of structural modifications with high robustness in preserving the model-free superiority of receptance-based techniques. The numerical validation of the proposed method on a five-degree-of-freedom system demonstrates its capability to compute high-robust modifications in meeting the prescribed requirements and satisfying all the constraints.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Nowadays, the energy density of a machine has significantly increased because such a machine tends to transfer a great amount of power or operate more efficiently than before. As a result, the dynamic strength failure caused by the resonance between the operating frequency and natural frequency is the most outstanding vibration control problem for a machine system [1]. From a structural dynamics point of view, employing inverse structural modification to shift its natural frequency away from the operating frequency is a useful way to avoid resonance and achieve better dynamic performance [2]. In particular, receptance method is the most fascinating and popular for researchers since it neither involves the theoretical model of structures nor requires complete modal information [3]. However, a limitation of the receptance method is that robustness is not addressed, and hence, it is neglected how the assigned natural frequencies are affected by perturbations of the modification parameters about the nominal ones [4].
In the frame of natural frequency assignment, robustness is often interpreted as finding the robust modifications, ensuring the effectiveness of the assigned natural frequency even under parameter modifications with systematic error [5]. As far as this work is concerned, a novel receptance-based method for the robust natural frequency assignment is proposed. The potential perturbation in assigned natural frequency, which arises from parameter modifications with uncertainty, is quantified by utilizing analytical sensitivity formulae derived in this research. The sensitivity formulae are computationally efficient, even for a large number of parameter modifications, and require only measured receptances, thereby preserving the model-free superiority of receptance-based techniques. A global optimization procedure is used to perform the robustness assignment of natural frequency. The proposed technique is tested numerically on a multi-degree-of-freedom system. The results show that the obtained modifications by the proposed method can improve the robustness of the desired natural frequency to the uncertainty in parameter modifications and reduce the potential perturbation of the assigned natural frequency.
2 Method Formulation
2.1 Receptance-Based Structural Modification
Considering an N-degrees of freedom (DOFs) un-damped vibrating system, its free vibration equation can be expressed as
where K, M ∈ ℜN×N are mass stiffness and matrix matrices of the original system, respectively. (ωi, ui) is ith eigenpair, made by ith natural frequency and its related mode shape.
The problem of assigning the desired natural frequency is aimed at finding the additive structural modification matrices ΔK, ΔM ∈ ℜN×N satisfying [2]
where ῶi is the ith natural frequency of the modified system, also a desired natural frequency; ũi is the corresponding ith mode shape of the modified system. Since
is the receptance matrix of the original system at the frequency ῶi. After pre-multiplying the receptance matrix, Eq. (2) can be rewritten as [3]
where the dependence of ΔK, ΔM on the design variables is stressed and collected in vector θ = \(\left[ {\theta_{1} , \, \ldots ,\theta_x } \right]^{\text{T}}\) ∈ ℜx; Na is the number of desired natural frequencies.
The key to assigning the desired natural frequency is to compute the design variable vector θ. However, the solvability of Eq. (4) is not ensured since no assumption has been made on the rank-matching conditions. If the specification on mode shape is introduced, the number of design variables is required to be increased. More especially, the constraint on the design variables due to physical or technical limitations extremely limits the attainable natural frequency and often imposes more design variables to assign just one eigenvalue. Hence, Eq. (4) can be conveniently recast as a constrained least-square minimization [3].
where αi is the positive weighing scalar, ΔB(ῶi,θ) = ΔK(θ) − ῶi2ΔM(θ) is structural modification matrix, and ||·||2 denotes the Euclidean norm of a vector. Γθ represents the feasible domain of those design variables, which includes lower and upper bounds (denoted by θL and θU, respectively).
Suppose mode shapes (eigenvector) are not required to be assigned or just partially assigned. In that case, those unassigned mode shapes are treated as additional unknown entries, which are also constrained to the additional feasible domain Γũ: ũL ≤ ũ ≤ ũU. As a consequence, Eq. (5) can be further rewritten as.
where the Γ = Γθ ∪ Γũ represents the union of the feasible domain of θ and ũ.
It should be noted that the nonlinear programming problem in Eq. (6) can be converted as a non-convex optimization problem, whose least-square solutions can be computed by employing MATLAB built-in function fmincon [4].
2.2 Sensitivity-Based Robust Assignment of Natural Frequency
From the perspective of optimization, the least-square solutions admitted by Eq. (6) are not unique, which means that Eq. (6) can provide a series of alternative modification schemes for designers. Even if all of the modification schemes can theoretically realize the accurate assignment of the desired natural frequency, the real assignment results obtained by implementing different modification schemes may occur perturbation error and then have different assignment accuracy due to the presence of uncertainty of modification parameters.
In order to evaluate the potential perturbation of the target natural frequency assigned by different modification schemes, the sensitivity of the target natural frequency with respect to those variable modification parameters is exploited and redefined as follows.
By exploiting the derived expression about sensitivity, the potential perturbation of the target natural frequency can be evaluated by employing the total differential approach and expressed as
Extending the differential of each parameter modification leads to
It should be noted that δθj is the maximum systematic error of the modification parameter θj caused by the uncertainty, which is known or can be obtained by estimating.
With the perturbation expression of the target natural frequency derived, it is possible to improve the problem in Eq. (6) by maximizing the robustness of the target natural frequency to the uncertainty in parameter modifications. In order to do so, Eq. (9) can be introduced to the optimization problem in Eq. (6) as an extra term penalizing poor-robust solutions and boosting the obtaining of the modifications with high robustness. As a consequence, the robust assignment problem of natural frequency becomes the following bi-criterion optimization problem.
where λ > 0 denotes the penalizing scalar and is selected to trade between the cost of using parameter modifications with low sensitivity and the cost of missing the natural frequency assignment specification. As far as this work is concerned, λ is set as 10–4.
Clearly, such a strategy can provide assistance in handling the inaccuracy problem of the assignment result due to the uncertainty of the modification parameters and realizing the robust assignment of natural frequency.
3 Numerical Assessment
In order to demonstrate the working of the proposed method, a numerical example is presented in this section. It should be noted that the needed receptance data in the example are all obtained from simulation, which is usually measured by experiment technology in real.
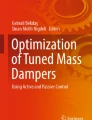
The employed numerical example is a five-DOFs system with five lumped masses, which has been adopted widely as a benchmark for eigenvalue assignment methods [1, 4, 6, 7]. The five-DOFs system is shown in Fig. 1, and its corresponding system parameters are collected in Table 1.

A five-DOFs lump mass system in Ref [6].
In this work, structural modifications are only admitted for the five lumped masses as well as the five grounding springs, whose feasible domains have been shown in Table 1, leading to the design variable vector being a 10-dimensional vector (θ = [Δkg1, Δkg2, Δkg2, Δkg3, Δkg4, Δkg5, Δm1, Δm2, Δm3, Δm4, Δm5]T). In order to evaluate the effectiveness of the proposed method, the uncertainty is introduced to all stiffness modifications of the ground spring used to implement, and the implemented stiffness modification with uncertainty is assumed to obey the normal distribution N(Δkgi, (6.25%Δkgi)2).
The assignment task is to assign a natural frequency at 25 Hz. In this case, the mode shape of the lumped mass m2 at the desired natural frequency is required as 1, and all other mode shape entries at this frequency are prescribed to belong to interval [−1, 1].
In order to demonstrate the working of the proposed robust assignment method, a typical partial eigenstructure assignment method without robustness constraints [7] is employed for comparing with the proposed method. The nominal values of structural modifications obtained by the two methods are reported in Table 2. The five variable stiffness modifications and the sensitivities of the desired natural frequency to those stiffness modifications are instead highlighted in Fig. 2.

Stiffness modifications and sensitivities of the two methods.
It is interesting to notice that different nominal values of the stiffness modifications are provided by the two natural frequency assignment methods in the case of similar sensitivities of the desired natural frequency to stiffness modifications. The stiffness modifications obtained by the classical (nonrobust) assignment method have no apparent correlation with the sensitivities; in contrast, those obtained by the proposed (robust) assignment method have a negative correlation with the sensitivities. It is evident that the prescribed natural frequency by employing the proposed method has a lower sensitivity to the uncertainty of the stiffness modifications compared with the typical method.
In order to further demonstrate the superiority of the proposed method, the Montecarlo statistical analysis is implemented: normally distributed random errors are imposed to the nominal values of Δkg1–Δkg5, and the stiffness modifications with uncertainties are simulated; the variability of the modified receptances is evaluated; the probability density functions of the frequency perturbations of the assigned natural frequency are obtained. The results are shown in Fig. 3.
What stands out in Fig. 3 is that the natural frequency assigned by the proposed method has a smaller perturbation interval than that assigned by the typical method. More especially, the probability of the assigned natural frequency being between [24.85, 25.15] Hz is 0.98 for the proposed method, much higher than 0.68 for the typical method. Such impressive comparisons corroborate the effectiveness of the proposed method in improving the robustness of the target natural frequency to the uncertainty in modification parameters and reducing the potential perturbation of the assigned natural frequency.

(a) the modified receptance h15 obtained by the typical (nonrobust) method; (b) the probability density functions of the frequency perturbations of the nonrobust method; (c) the modified receptance h15 obtained by the proposed (robust) method; (d) the probability density functions of the frequency perturbations of the robust method.
4 Conclusion
This paper proposes a novel receptance-based robust assignment method of natural frequencies. The sensitivity of the desired natural frequency with respect to those parameter modifications with uncertainty is derived and introduced to the optimization calculation of the natural frequency assignment as an extra term penalizing poor-robust solutions. Such a treatment boosts the obtaining of the nominal values of structural modifications with high robustness and reduces the potential perturbation of the assigned natural frequency due to the uncertainties in the implemented stiffness modifications. The effectiveness of the proposed method has been demonstrated by comparing its performance with a typical eigenstructure assignment method proposed in literature. The natural frequency assignment of a five-DOF system has been performed, and it has been shown that the robust assignment of natural frequency is achieved by the proposed method, hence overcoming the shortcoming with poor robustness of the typical method.
References
Ouyang, H., Richiedei, D., Trevisani, A.: Eigenstructure assignment in undamped vibrating systems: a convex-constrained modification method based on receptances. Mech. Syst. Signal Process. 27(1), 397–409 (2012)
Mottershead, J.E., Ram, Y.M.: Inverse eigenvalue problems in vibration absorption: passive modification and active control. Mech. Syst. Signal Process. 20(1), 5–44 (2006)
Mottershead, J.E., Tehrani, M.G., Ram, Y.M.: Assignment of eigenvalue sensitivities from receptance measurements. Mech. Syst. Signal Process. 23(6), 1931–1939 (2009)
Caracciolo, R., Richiedei, D., Tamellin, I.: Robust assignment of natural frequencies and antiresonances in vibrating systems through dynamic structural modification. Shock. Vib. 2021, 1–20 (2021)
Adamson, L.J., Fichera, S., Mottershead, J.E.: Receptance-based robust eigenstructure assignment. Mech. Syst. Signal Process. 140, 106697 (2020)
Zhang, L., Zhang, T., Ouyang, H., Li, T.: Receptance-based antiresonant frequency assignment of an uncertain dynamic system using interval multiobjective optimization method. J. Sound Vib., 116944 (2022)
Belotti, R., Richiedei, D., Trevisani, A.: Optimal design of vibrating systems through partial eigenstructure assignment. J. Mech. Des. 138(7), 2–9 (2016)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Lin, Z., Tao, Z., Huajiang, O., Tianyun, L., Baoyou, S. (2023). Receptance-Based Robust Assignment of Natural Frequency in Vibration Systems. In: Dimitrovová, Z., Biswas, P., Gonçalves, R., Silva, T. (eds) Recent Trends in Wave Mechanics and Vibrations. WMVC 2022. Mechanisms and Machine Science, vol 125. Springer, Cham. https://doi.org/10.1007/978-3-031-15758-5_29
Download citation
DOI: https://doi.org/10.1007/978-3-031-15758-5_29
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-15757-8
Online ISBN: 978-3-031-15758-5
eBook Packages: EngineeringEngineering (R0)