
Abstract
Pattern analysis of ground reaction forces (GRF) exerted by athletes during sports execution helps coaches design appropriate training to enhance athletes’ performance and prevent injuries. Nevertheless, few portable devices are capable of measuring such plantar forces in 3-axis without restricting the athlete’s movement. This paper presents the electronic design of a wearable plantar outsole for 3-axis GRF measurement suitable for sports applications, with emphasis on the volleyball reception technique. The outsole is composed of five 3-axis force sensors made of piezoresistive sensors. Sensed signals are processed in a microcontroller ESP32 and subsequently transmitted to a mobile phone by Bluetooth where data plots are displayed for immediate analysis. A static test over one foot is performed in order to evaluate the sensor error. Tests of gait analysis and frontal squat are also performed to validate the operation of the data-acquisition system. The 3-axis GRF sensor measures forces up to 1000 N in the z-axis and ±200 N in both x- and y-axis. Thus, the outsole senses up to 5000 N in the z-axis and ±1000 N in the x- and y-axis. Measurement errors were 148 ± 39 N (24 ± 6.3%) and 65 ± 25 N (10 ± 3.9%) in the z-axis, for the static and the frontal squat tests, respectively.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Team sports heavily rely on tactics and technique. While tactics involve careful planning of individual or team actions in order to achieve an expected situation in a game; technique, on the other hand, focuses on the movements and skills that each athlete requires to complete a certain task according to the rules of a certain sport. An inadequate execution of the technique not only can affect a game outcome but also can cause injuries to the athlete. The ankle sprain and the anterior cruciate ligament (ACL) tear are the two most common injuries in volleyball, representing 41% and 12% of all injuries, respectively [1]. Likewise, these conditions are quite present in basketball [2] and handball [3].
Nowadays, an athlete’s body movement can be analyzed by measuring kinetic and kinematic parameters like the ground reaction forces (GRFs) and the limb positions, which can be used to determine the physical load on the joints of the lower limbs by using inverse dynamics [4]. With this information, personalized training can be designed according to the needs of each athlete to improve their performance and reduce the risk of injuries, but also to optimize rehabilitation therapy for injured athletes [5].
Many commercial products can accurately measure the GRFs. Force plates, for example, allow obtaining the 3-axis GRFs in a wide range and with a high sampling frequency that can reach up to 1000 Hz. An example of its use can be seen in the study made by Kimitake and Heise [6]. There also exist insoles that measure plantar forces, such as Pedar and F-Scan. They are lightweight and have a module that wirelessly transmits the signals to a computer.
The aforementioned devices have disadvantages when used in a training session. Force plates must be fixed to the ground, which limits the movement of the athlete, hence leading to the acquisition of not representative data. On the other hand, insoles only measure vertical GRFs. An exception is Son et al. [7], who proposed the design of a shoe insole that can measure GRFs of up to 4000 N in the z-axis and ±2000 N in the horizontal axes but does not have wireless communication. This paper also proposes a wearable device capable of measuring 3-axis GRFs that takes the form of a plantar outsole comprising triaxial force sensors and communicates wirelessly to a mobile phone for measurement output.
2 Triaxial Force Sensor and Plantar Outsole
2.1 Design Requirements for the Triaxial Force Sensor
The maximum forces measured in a force plate during a volleyball serve reception were 106%, 16%, and 6% of the body weight in the z-, x-, and y-axis, respectively. Considering an average body weight of 71.7 kg for a volleyball female player [8], the proposed sensor was set to measure a vertical force of up to 1000 N, and ±200 N in both horizontal axes. It should have a response time of less than 2 ms in order to be sampled at 500 Hz (see Sect. 2.4). Based on the requirements of the outsole defined in Sect. 2.3, the maximum sensor weight allowed is 60 g.
2.2 Design and Fabrication of the Triaxial Force Sensor
The proposed triaxial force sensor contains an array of single-axis piezoresistive sensors, the Flexiforce A301. This piezoresistive sensor has a force range from 0 to 4440 N, a linearity error of less than 3% FSO (Full-Scale Output), and a hysteresis of less than 4.5% FSO. Its response time is less than 5 \(\mu \)s. Since it only senses forces applied perpendicular to its surface, a mechanism was developed to convert shear forces to normal forces. This mechanism consists of two pieces, a solid interior prism and an exterior cylindrical structure with a prismatic hollow in whose walls are the load concentrators that stay in contact with the prism faces so that whenever a shear force of magnitude \(F_{S}\) is exerted on the upper face of the prism, a normal force \(F_{N}\) of equal magnitude is produced on the concentrator, see Fig. 1a.
The Flexiforce sensors are attached to the internal cylinder lateral faces so they can measure the \(F_{N}\) generated in each face. Because the sensing area has a diameter of 9.53 mm, the concentrator base diameter should be 7.97 mm to guarantee repeatability [9]. The prism dimensions are constrained by the size of the Flexiforce sensor (14 mm \(\times \) 18 mm). Hence, the prism dimensions are 14 mm \(\times \) 14 mm \(\times \) 18 mm. The cylindrical piece has a diameter of 40 mm and a height of 22 mm. The material selected for the prism and the cylindrical structure are A7075 and ABS, respectively, whose suitability is confirmed in a Finite Element Analysis simulation performed in the software Inventor. The maximum forces that the triaxial sensor must stand in each axis, namely, 1000 N in the z-axis and 200 N in the x- and y-axis, are simultaneously applied to the upper face of the prism. The maximum stresses generated on the prism and outer structure (163.2 MPa and 1.263 MPa, respectively) were inferior to the yield strength of the materials selected (see Fig. 1b and 1c). A prototype of the triaxial sensor was developed with the two aforementioned pieces and off-the-shelf materials, as shown in Fig. 2b.

Triaxial force sensor (a) Mechanism to transform shear force into normal force. (b) Stresses on the A7075 prism. (c) Stresses on the outer ABS piece.
A force conductance curve was obtained by measuring the resistance of the Flexiforce A301 sensor using standard masses (see Fig. 2a). Equation (1) for the conductance G, in nanoSiemens (nS), with respect to the force F in Newtons (N), was derived using the least square error method with a coefficient of determination (\(R^{2}\)) equal to 0.98.

(a) Force conductance curve of the Flexiforce A301 sensor. (b) Prototype. (c) Outsole distribution of sensors.
2.3 Fabrication of the Plantar Outsole
The outsole must weigh up to 300 g in order not to affect the subject’s movement [10]. Five points of the foot sole, where most of the pressure is applied, were chosen to place the triaxial sensors based on several studies [11, 12] (see Fig. 4c). To define the exact position of the triaxial sensors on the outsole, the coordinate system origin is placed at the center of the minimum-area rectangle enclosing the sport shoe outsole (see Fig. 2c) - as done in Huanghe Zhang et al. [13].
2.4 Plantar Outsole Data Acquisition
The DAQ system should sample each of the 25 signals of one outsole (five force signals for each of the five sensors) at 500 Hz in order to capture the impact signals accurately [14]. It should also have a resolution of 1 N. In addition to this, the system must have an energy autonomy of at least one hour so that it can be used during a training session. In order to find a linear relationship between the force applied to the triaxial sensor and the voltage signal, a non-inverting amplifier circuit was designed with the gain shown in Eq. (2).
where A is the gain of the amplifier, \(R_1\) is a feedback resistance, and \(R_{FSR}\) is the sensor resistance. \(V_{IN}\) and \(R_1\) parameters are 0.5 V, and 95 k\(\Omega \) and 470 k\(\Omega \) for the normal and shear axes, respectively; so that the output is constrained between 0.5 and 3.3 V. To avoid aliasing, third-order and second-order Butterworth low-pass filters were designed for the normal axis and shear axes, respectively; both filters suppress frequencies above 250 Hz. An array of 74HC multiplexers connected to a 12-bit SAR ADC (MCP3208) with an SPI serial interface was used to digitize the 25 signals one by one. The DAQ system is powered by a lithium-polymer battery with a capacity of 1000 mAh, resulting in the autonomy of 5 h.
2.5 Plantar Outsole Data Processing and Transmission
An ESP32 microcontroller receives and filters the digitized data using a fourth-order Butterworth digital filter. Then, each value is converted to Newtons. The values of this conversion were determined by experimental calibration using standard masses (see Sect. 3.1), then a linear relationship between the force applied and the quantity given by the ADC was found by using the least square error method. After that, the total force in each axis of the outsole, as well as the center of pressure (CoP), are calculated using the Eqs. (3) and (4).
where F is the force applied in the N-axis, and \(x_{i}\) and \(y_{i}\) are the i-th sensor coordinates. This process is summarized in the flowchart shown in Fig. 3a.

Flowchart. (a) Flowchart of data processing in the ESP32 microcontroller. (b) Graphical user interface of the mobile app.
Then, a string composed of the character ‘A’ (for identification of a new string) followed by the time the data was sampled (in milliseconds), the total force produced in each axis of the outsole, the force measured per sensor per axis, and the center of pressure in the \(x-\) and y-axis, is sent through Bluetooth. These parameters were previously rounded to the nearest integer and concatenated in the form of characters. Each parameter is separated by a comma.
2.6 Plantar Outsole Interface
A mobile app composed of three threads was developed in the software Android Studio. The main thread is constantly checking whether the buttons are pressed and displays the plots with newly available data. The second thread handles the connection between the mobile phone and the wireless module. The third thread checks whether there is available data in the Bluetooth buffer, decodes the string received to transform it into numerical values, and sends these values to the main thread. The graphical user interface (GUI) is shown in Fig. 3b.

Test setup of the triaxial sensor and DAQ system. (a) Calibration and test setup. (b) Hysteresis curve. (c) Outsole distribution of sensors.

Experimental study. (a) Subject performing tests. (b) Static measurement on the right foot. (c) Measurement on the right foot during walking.
3 Integration and Experimental Study
3.1 Prototype Calibration
The sensor was tested with the elements used in the calibration process (see Fig. 4a) for the setup. Masses of 5 kg, 10 kg, 15 kg, 20 kg, 25 kg, 30 kg, and 63 kg were applied during five seconds in two stages, load and unload, three times. Then, the average of the three processes was taken, and the mean value of the last three seconds was used to calculate the difference between load and unload (see Fig. 4b). The sensor presented a hysteresis of 0.7%.
3.2 Experimental Tests
A male volunteer (age = 23 years, height = 168 cm, weight = 63 kg) wearing sport shoes was required to wear the plantar outsole (see Fig. 5a). The 3-axis sensor was attached to the base of the right shoe in one of the positions defined in Sect. 2.3. The rest of the positions were covered with pieces of polystyrene to compensate for the height of the sensor (see Fig. 4c). It was assumed that the evaluated movement’s force distribution in the outsole was similar every time the sensor position was changed.
Static Test. The subject was asked to stand on his right foot for 5 s. This process was repeated five times for each of the five sensor positions. The mean of the five measurements in each position was calculated and then added. Figure 5b shows the total force compared with the bodyweight of the subject which is 617 N. The total average value obtained was 765 N, which resulted in an error of 148 ± 39 N (24 ± 6.3%).
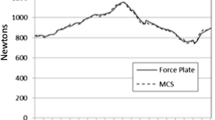
Dynamic Test. The subject was required to walk and measurements of his right foot were recorded. The subject made three sets of four steps. The vertical and anteroposterior components (see Fig. 5c) show similarities with the pattern seen in previous studies [7]. Nevertheless, the force recorded is less than the bodyweight of the subject. The CoP, which follows a path from the heel to the ball of the foot is similar to the one presented in [13].
Frontal Squat Test. A frontal squat movement was assessed due to its use in the physical conditioning of volleyball players. The subject was required to do five sets of five squats with a rest period of two minutes between sets. This routine was repeated for each sensor position for each foot. The squat required the subject to spread his feet shoulder-width apart and hold a 3 kg dumbbell with both hands in front of his chest (see Fig. 5a). The movement begins with the subject standing upright and finishes with his knees in 90 \(^\circ \) with a rhythm of 2-1-2-2 (two seconds down, one second at the bottom, two seconds up, and two seconds rest) [6]. The total force measured in the z-axis in both feet must be 647 N, which is the bodyweight of the subject plus the weight of the dumbbell. Nevertheless, an error equal to 65 ± 25 N (10 ± 3.9%) is obtained.
4 Conclusion
In this paper, the design of a wearable plantar outsole for 3-axis GRF measurement has been presented. First, a small and lightweight triaxial force sensor that can measure and stand the forces generated in volleyball serve reception has been designed. The DAQ system designed samples the 25 input signals at 500 Hz, which are then processed and transmitted to a mobile app wirelessly. The experimental validation of the system was performed by comparison with other results from the literature. The static test showed an error of 24 ± 6.3%, which should be corrected through value-calibration. The gait test produced a pattern similar to those of previous studies and showed that the sensor and the DAQ system are suitable for measuring GRFs and determining the center of pressure. Moreover, the test of the frontal squat showed that the equipment can be used in sports activities.
Future work involves more tests in order to obtain the error and crosstalk in the horizontal axes. Due to the fact that changing the sensor position and repeating the evaluated movement is a possible source of error, tests using the full array of triaxial sensors in the outsole should be performed.
References
Verhagen, E., Van der Beek, A.J., Bouter, L.M., Bahr, R., Van Mechelen, W.: A one season prospective cohort study of volleyball injuries. Br. J. Sports Med. 38(4), 477–481 (2004)
Sitler, M., et al.: The efficacy of a semirigid ankle stabilizer to reduce acute ankle injuries in basketball: a randomized clinical study at west point. Am. J. Sports Med. 22(4), 454–461 (1994)
Olsen, O., Myklebust, G., Engebretsen, L., Holme, I., Bahr, R.: Relationship between floor type and risk of ACL injury in team handball. Scand. J. Med. Sci. Sports 13(5), 299–304 (2003)
Sell, T.C., et al.: Predictors of proximal tibia anterior shear force during a vertical stop-jump. J. Orthop. Res. 25(12), 1589–1597 (2007)
Bahr, R., Krosshaug, T.: Understanding injury mechanisms: a key component of preventing injuries in sport. Br. J. Sports Med. 39(6), 324–329 (2005)
Sato, K., Heise, G.D.: Influence of weight distribution asymmetry on the biomechanics of a barbell back squat. J. Strength Conditioning Res. 26(2), 342–349 (2012)
Son, J., Gu, G. M., Han, H., Kim, J.: Development of instrumented outsole for high resolution ground reaction force sensing. In: 2012 4th IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob). IEEE, pp 106-111 (2012)
Fernández, J., Rubiano, P., Hoyos, L.: Perfil morfológico de voleibolistas de altos logros: revisión. Revista Internacional de Medicina y Ciencias de la Actividad Física y del Deporte (2017)
Tekscan: Flexiforce integration guide (2015). https://www.tekscan.com/flexiforce-integration-guides. Accessed 03 Apr 2019
Abdul Razak, A.H., Zayegh, A., Begg, R.K., Wahab, Y.: Foot plantar pressure measurement system: a review. Sensors 12(7), 9884–9912 (2012)
Liu, T., Inoue, Y., Shibata, K.: A wearable ground reaction force sensor system and its application to the measurement of extrinsic gait variability. Sensors 10(11), 10240–10255 (2010)
Salpavaara, T., Verho, J., Lekkala, J., Halttunen, J.: Wireless insole sensor system for plantar force measurements during sport events. In: Proceedings of IMEKO XIX World Congress on Fundamental and Applied Metrology, pp 2118-2123 (2009)
Zhang, H., Zanotto, D., Agrawal, S.K.: Estimating cop trajectories and kinematic gait parameters in walking and running using instrumented insoles. IEEE Rob. Autom. Lett. 2(4), 2159–2165 (2017)
Bartlett, R.: Introduction to Sports Biomechanics, pp. 201–203. Routledge, London (2007)
Acknowledgment
This work was supported by the Peruvian Funding Agency Concytec-Prociencia, contract number 058-2018-FONDECYT-BM-IADT-AV.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Moscoso, R., Callupe, R., Garcia, J., Villota, E.R. (2022). Three-Axis Sensor Development for Ground Reaction Forces Measurement with Sports Applications. In: Iano, Y., Saotome, O., Kemper Vásquez, G.L., Cotrim Pezzuto, C., Arthur, R., Gomes de Oliveira, G. (eds) Proceedings of the 7th Brazilian Technology Symposium (BTSym’21). BTSym 2021. Smart Innovation, Systems and Technologies, vol 295. Springer, Cham. https://doi.org/10.1007/978-3-031-08545-1_66
Download citation
DOI: https://doi.org/10.1007/978-3-031-08545-1_66
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-08544-4
Online ISBN: 978-3-031-08545-1
eBook Packages: EngineeringEngineering (R0)